考虑摩擦特性的机器人柔性关节鲁棒控制器设计
Design of robust controller for robot flexible joint with friction characteristic
考虑摩擦特性的机器人柔性关节鲁棒控制器设计 |
| 陈健, 葛连正, 李瑞峰 |
Design of robust controller for robot flexible joint with friction characteristic |
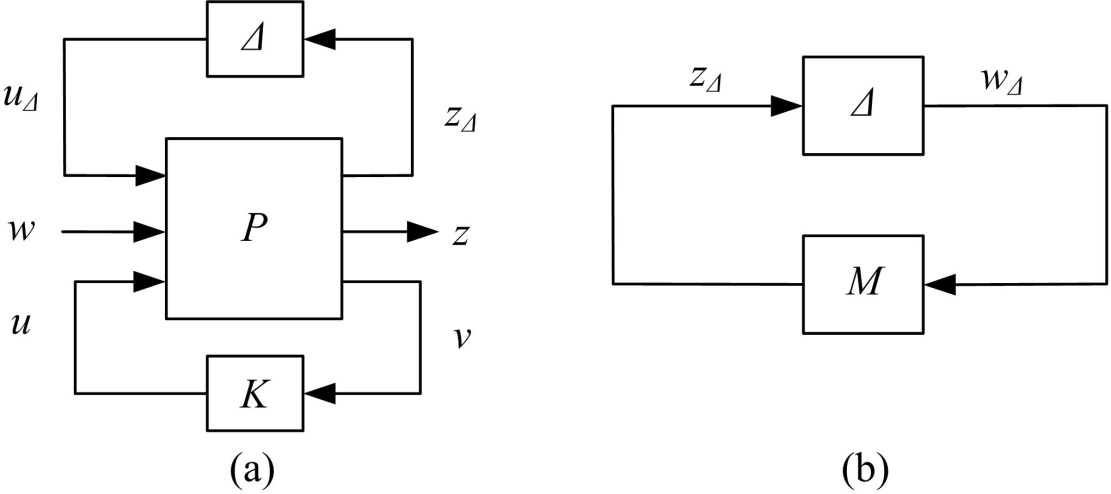
| 包含不确定性的广义系统及用于鲁棒性分析的 M-Δ 结构 |
| |