


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
面向可靠感知的传感网节点部署优化算法
[刘军1  , 程良伦
, 程良伦1, 2 , 王涛1 , 王建华1 ]
, 程良伦|
|


作者简介:刘军(1986-),男,博士研究生.研究方向:控制科学与工程,传感器网络,物联网,信息物理融合系统.E-mail:liujun7700@163.com
首先推导出确定部署时基于V剖分感知误差最小,定义各个节点分区的覆盖权值。然后基于感知节点覆盖权值和虚拟力思想提出了一种部署优化算法,在确保感知不确定性最小化的同时保证网络连通性。最后仿真比较了在不同节点密度以及不同事件优先级下算法的部署性能,结果表明,本文提出的部署算法相比于其他算法能够有效地实现对热点区域的优化部署,保证较小的感知误差。
In this paper, first, it is deduced that the sensor uncertainty is minimum with Voronoi partition; a node coverage weight by priority function of event area is defined. Then a nodes deployment optimization algorithm is proposed based on node coverage weight and virtual force. It guarantees the connectivity of network while the sensing uncertainty is minimal. Finally, computer simulation is carried to compare the deployability of the proposed algorithm with other algorithms under different node densities and different event priorities. Simulation results show that the proposed deployment algorithm is quick and effective with smaller sensing uncertainty compared with other deployment algorithms. Also the proposed algorithm has strong robustness.
移动传感器网络(Mobile sensor networks, MSNs)节点具备感知、计算、通信和移动能力, 能够针对部署区域的动态事件进行迅速的部署解决问题[1, 2]。因此MSNs已引起广泛关注。在监测区域内, 针对复杂动态环境, 如何部署移动节点使得MSNs有效地覆盖监测区域或目标是一个重要的研究方向[3]。
文献[4, 5]借鉴库仑力、胡克定律以及边界斥力等组合虚拟力研究传感器节点在监测区域的三维空间重部署方法, 实现对区域的覆盖以及优化能量效率。Liang等[6]针对随机部署存在的监测空洞, 通过将多边形分解为三角形后, 提出一种分治部署策略对其实现完全覆盖。涂志亮等[7]针对动态目标(事件源)的监测优化问题, 集合Voronoi剖分提出基于群集控制的传感器节点部署分布式控制算法。针对移动传感器网络热点覆盖问题, Milan等[8]提出保证网络连通性是覆盖优化前提, 结合RNG模型保证网络连通性, 提出了热点部署算法能够实现对静态、动态热点的覆盖部署。
有人结合仿生进化算法来研究传感器节点的部署优化, Liu等[9]通过蚁群三种传输策略提出优化算法, 排除不可行解, 减少搜索空间以完成监测区域的优化覆盖。夏娜等[10]针对水下传感器网络应用, 提出了一种鱼群启发的水下传感器节点布置算法, 通过模拟鱼群行为, 并结合拥挤度控制, 使节点自主趋向并覆盖事件, 同时实现节点分布密度与事件分布密度相匹配部署。但算法的研究并未考虑网络连通性问题, 作者在进一步研究中, 引入刚性理论构造水下传感器网络覆盖度和连通性的联合优化目标, 提出相应的节点位置评价指标和节点移动策略, 从而较好地解决水下传感器节点自组织布置问题[11]。
在有些传感器网络应用场景中传感器节点不可能有效覆盖整个目标区域, 比如军事应用监测, 环境监测等大面积部署[12, 13]。以GreenOrbs项目为例[14], 其1.1 km2面积即部署了1200多个节点, 对于如战场环境面积上千平方公里, 若考虑K-覆盖部署, 其部署的节点数目巨大。在有些应用并不需要对整个区域实时进行有效监测, 只是需要对某些可能出现的目标区域进行有效监控即可。Hamid等[15]假设监测区域各点的优先级不同, 感知节点异构, 在随机部署后检测自身区域中的空洞大小, 然后提出三种策略移动传感器节点覆盖优先级更高的区域, 算法实现了对优先级区域的覆盖, 但缺少对网络连通性的考虑。
本文假设场景为在大面积区域中, 随机产生部分突发事件, 在监测到事件后, 传感器节点通过移动实现对这些区域的有效覆盖。提出了一种新的分布式部署策略完成对优先级区域的覆盖。该事件是带优先级感知区域, 对其部署需要依据优先级进行部署, 对于优先级高的区域部署的节点应该多, 保证可靠性高; 对于优先级低的区域, 部署的节点可以相对少, 但要求保证网络连通, 这样使得整个网络的部署达到最优。
假设在传感器网络监测区域中, 某事件随机发生于监测区域中, 如图1所示。其中事件区域依据距离事件中心位置不同而存在不同优先级, 该模型类似于文献[15]。存在优先级函数φ
 | 图1 冗余节点移动Fig.1 Redundant nodes moved |
对于感知节点在监测区域部署的优劣可以通过节点对于监测区域中各点的感知误差来衡量。与感知误差为感知节点对分区中某点采集的数据精确程度。与感知误差距离有关, 节点距离目标点越远则误差越大, 误差函数即为区域各点与所述传感器节点的距离的函数。
定义1 误差函数:设pi为传感器节点Si在区域A中的位置。感知误差函数为g(‖ q-pi‖ ), 表示分区中点q被位于位置pi的节点采集数据的误差。‖ q-pi‖ 为目标点与感知节点的欧氏距离。
定义2 区域剖分:设n个传感器节点部署在区域A中, 依照各个节点部署位置将整个感知区域分为各个节点的专属区域, 整个分区集合表示为V。Vi代表节点i的感知区域, 其所有剖分的联合构成了整个区域的覆盖。
定义3 节点i的感知区域的误差为:
式中:Vi为节点i的感知区域。
定义4 整个部署区域中的误差函数为:
优化部署就是最小化感知误差函数值。
对于给定的区域A和节点位置部署方案P, 对节点的分区有无限种可能, 依据Voronoi剖分的定义有:
基于Voronoi剖分的分区是感知误差最小的。但是给定n个传感器节点部署于区域A中, 每一种部署都有一种V剖分, 因此需要寻找优化的部署策略P, 其构成的P能够最小化G
对于有限的传感器节点在带优先级的事件区域内通过算法实现合理的部署, 从而实现对区域的尽可能的精确监测, 而保证连通性是首要条件。主要思想就是通过将事件区域外的节点移动到事件区域中, 并依照各点的优先级进行不同疏密程度的节点覆盖。图1表示如何从事件区域外移动多余的节点到事件区域内的一种推挤策略。由于在事件区域外仅需要保证网络连通性, 因此在保证网络连通性下存在的冗余节点可以通过推挤方法将传感器节点移动到事件区域。这里的思想类似文献[16], 使得保证网络连通性的传感器节点最小化, 使得保证监测区域的传感器节点数量最大化。
如何实现在事件区域内形成这种疏密部署是算法要解决的另外一个问题。一个剖分区域的优先级通过覆盖权值来衡量, 如定义5所示。
定义5 覆盖权值:
式中:Π i表示第i节点的分区;
本文拟采用一种虚拟力策略实现节点移动, 假设传感器节点受到周围邻居节点的引力或斥力。每个节点在自己的监测区域中能够得出一个权值, 即优先级与区域积分, 定义为覆盖权重值。若本节点的覆盖权值大, 则对周围其他节点有引力, 使得周围节点靠近, 自身的区域减少, 而自身覆盖权重值则降低, 最终目标使得整个网络节点的覆盖权重值一致。
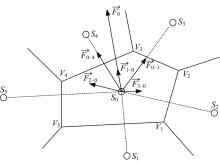
如图2所示, 节点S0与S1, S2, S3, S4, S5相邻。各节点的覆盖权值分别为:
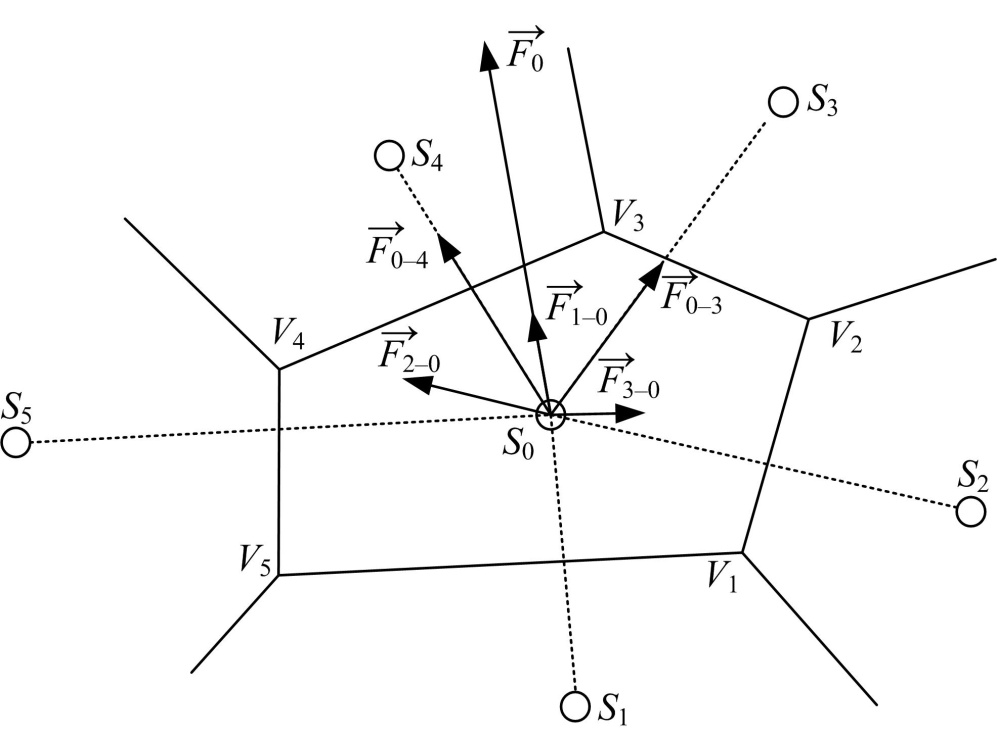 | 图2 节点受力分析Fig.2 Nodes stress analysis |
保证在事件区域内的各个节点覆盖权重值一致, 在外围由于优先级低, 要保证权值一致则节点分区大; 在中央位置优先级高, 当权值一致则分区小, 从而使得节点形成疏密明显的非均匀部署。
算法分为4步:①节点向周围节点广播自身位置, 然后构建自身V剖分; ②每个节点通过特定部署策略计算新的位置, 周围信息计算目标点, 得出新的部署策略; ③若本地与邻居节点权值比较其小于阈值则不移动; ④反复迭代, 直到任意一个节点的权值与周围节点的权值之差小于阈值, 则停止移动。
算法分为3部分:①计算虚拟力; ②计算方向和距离; ③节点移动。传感器节点向周围节点广播自身位置后, 进行V-剖分, 运行部署算法。感知节点u计算自身合力, 然后计算方向和距离, 最后移动, 移动时需考虑RNG图, 保证网络连通。
在移动时必须考虑连通性。d+(u)表示感知节点u到它的最远RNG节点的距离; R为节点通信距离, d为节点运行算法后的移动距离。d有如下约束条件:①d≤ (R-d+(u))/2; ②若d< σ 0, 则d=0, 即移动距离d应小于通信距离与最远邻居节点距离之差的一半, 最小移动距离应小于最小门限值ε 1。条件①和②给出了移动距离上限和下限的约束。条件①为节点最大移动距离约束, 移动距离d应小于通信距离与最远邻居节点距离之差的一半, 条件②保证最小移动距离应小于最小门限值σ 0。条件①主要保证网络的连通性, 条件②主要为保证节点移动收敛。
在Matlab2010平台上测试部署算法性能, 主要通过比较优化部署后的整个网络的感知误差值、收敛速度来判断部署算法性能。在仿真试验中, 节点随机部署在区域面积为100 m× 100 m的监测区域, 通过运行算法后实现疏密部署效果。监测事件随机产生于监测区域某一位置, 其他参数如表1所示。
| 表1 参数设置 Table 1 Parameter settings |
表1中, xp和yp分别是节点的横、纵坐标; R为节点通信半径; ε 为事件优先级因子, 表示事件概率收敛程度; σ 0表示最小移动距离; g
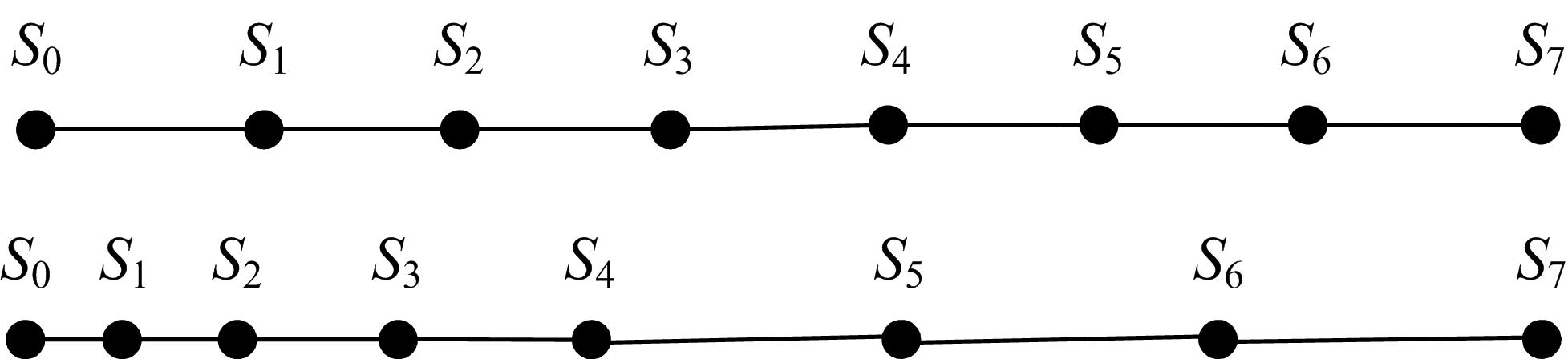
图3为试验1的部署效果图, 其中黑点代表事件中心区域, 节点通过运行部署算法, 慢慢向事件中心聚集, 最终达到疏密部署的效果。
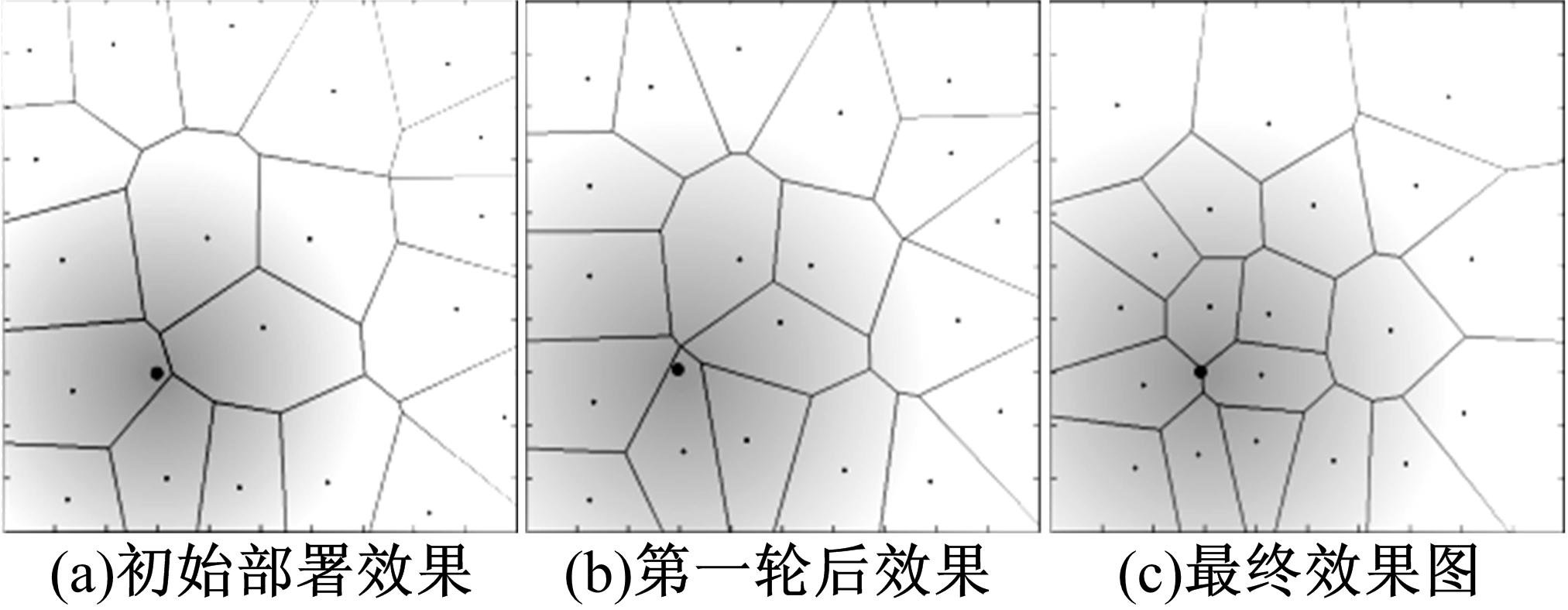 | 图3 优先级事件区域部署效果图Fig.3 Deployment in priority event area |
由图4可以看出, 算法经过多轮运行, 最后传感器节点部署完毕, 形成了依据优先级区别的疏密部署效果。由图4还可以看出, 在事件区域外围, 优先级低, 节点较稀疏, 各个节点对应的监测剖分区域面积较大; 事件中心区域优先级较高, 节点部署较稠密, 对应的监测剖分区域面积较小, 并通过RNG图保证了节点的连通性。
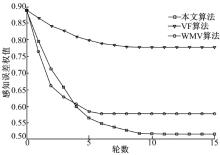
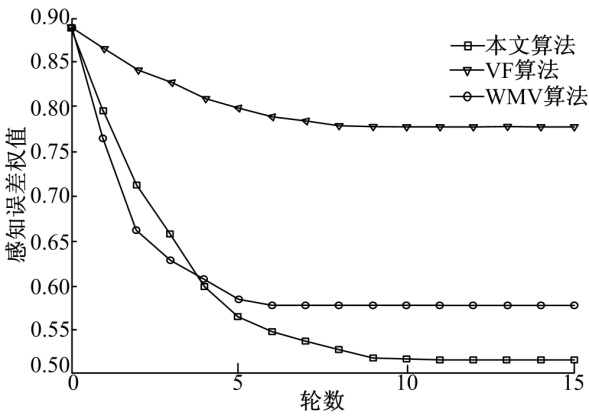 | 图4 不同算法在运行时误差权值比较Fig.4 Error weights in rounds with different algorithms |
通过仿真比较与其类似的优先级区域的移动传感器节点部署算法性能。一种为基于经典虚拟力的均匀部署, 一种为MWV针对优先级区域的部署[15], 由于这些算法的假设条件和运用场景与本文并不太一致, 下面做简单仿真比较。图4为各轮运行时误差值变化。图5为在不同的事件优先级情形下, 其误差函数值对比。
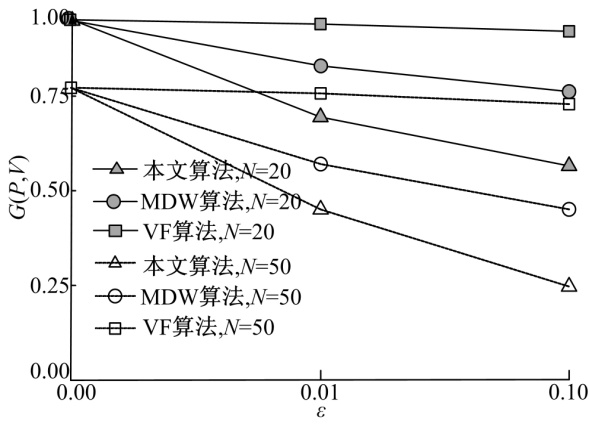 | 图5 不同节点密度以及事件优先级下误差权值比较Fig.5 Error weights comparison with different node density and events priority |
从图4和图5中可以看出, 本文提出的算法在运行15轮后其误差值最小, 说明其部署的性能优于其他两种算法。另外可以看出:本文算法的收敛性不如MWV算法, 主要因为本文提出计算权值方法以及合力方法较该算法的法则复杂。另外算法比较了在不同节点密度下以及在不同的时间优先级下的误差权值, 可以看出节点数量的部署性能更加优异, 另外在高事件优先级下本文算法的性能更佳, 这是由于本文设计的出发点就是为了满足权值一致。
针对带优先级的事件区域的监测研究传感器节点优化部署问题, 建立数学模型, 结合Voronoi图、RNG图以及虚拟力思想实现保证感知节点的连通性情况下优化部署性能, 降低感知误差。试验结论反应本文提出的方法针对优先级区域实现了疏密部署, 而且相比于同类算法, 具有更小的感知误差。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|