


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
高速公路驾驶人超车过程中的扫视行为
[李鹏辉1  , 张文会
, 张文会1, 2 , 胡孟夏1 , 李一兵1 , 吴彪3, 4 ]
, 张文会, 胡孟夏|
|


作者简介:李鹏辉(1991-),男,博士研究生.研究方向:汽车主被动安全,驾驶人行为.E-mail:liph2013@163.com
在驾驶模拟器内植入高速公路超车静态和动态场景,招募30位驾驶人完成超车过程的驾驶模拟试验,并采集驾驶人扫视频率、时间、角度和角速度等参数。将驾驶人视觉区域划分为5个部分,统计计算各区域之间的扫视概率。研究结果表明:超车过程中,目标车辆的速度不影响驾驶人的扫视频率,但对扫视时间、扫视角度和扫视角速度产生正相关影响;与目标车辆为小型车相比,同一速度水平下,超越大型车时驾驶人的扫视时间较长、扫视角度较大、扫视频率较低、扫视角速度较小;驾驶人在原车道和超车道之间的视觉转移概率最高,原车道和超车道是超车过程中驾驶人最为关注的区域。
Dynamic and static scenarios of overtaking on freeway were embedded into a driving simulator. Thirty drivers completed driving simulation and their saccade frequency, duration, angle and angular velocity were obtained. The driver's visual area was divided into five regions and the probability of viewpoint transition between any two regions was calculated. The results indicate that destination vehicle speed does not influence the saccade frequency, but shows positive correlation with saccade duration, saccade angle and saccade angular velocity. While the destination vehicle speed is the same, when overtaking a truck the driver's saccade duration is longer, saccade angle is bigger, saccade frequency and angular velocity are lower than that overtaking a small car. The driver's viewpoint transition frequency between initial lane and destination lane is the highest and the driver pays the most attention to these two lanes.
超车是高速公路常见的交通行为, 超车过程虽然短暂, 但驾驶人需要准确感知目标车道和原始车道的交通信息, 才能正确完成行为决策。视觉(注视和扫视)是驾驶人感知信息的主要方式, 注视行为能够反映驾驶人对兴趣区域的关注程度, 而扫视行为表征驾驶人视点在各区域之间的转移模式, 可反映驾驶人视觉搜索的广度, 因此更能揭示驾驶人超车过程的视觉搜索模式。表征驾驶人扫视行为的参数主要有扫视频率、扫视时间、扫视角度和扫视角速度。
国内外学者非常重视驾驶人眼动行为研究, Underwood等[1, 2]利用驾驶模拟器设计虚拟交通场景, 通过眼动仪获得驾驶人的注视范围、注视时间概率以及视觉转移特征等参数, 分析驾驶人注视的横向和纵向范围与驾驶经验、年龄和交通环境的关系, 结果表明注视范围越大, 行车风险越低。Konstantopoulos等[3, 4]设计夜晚和雨天等能见度较差的交通环境, 观察驾驶人的视觉行为特征, 从理论上揭示了较高的事故率与较差的视野有直接关系。Salvucci等[5]在模拟驾驶环境下分析车道变换过程中车辆的运行特征和驾驶人的眼动行为, 结果表明车辆运动轨迹呈正弦曲线, 驾驶人的扫视过程为:原车道— 目标车道— 后视镜。Shahar等[6]统计驾驶人注视内后视镜、左后视镜和右后视镜的时间, 建立注视时间与驾驶风险的关系模型。
裴玉龙等[7]以小型客车和大型客车驾驶人在车道变换过程中视点变化数据为样本, 获得各区域的注视转移概率。王芳等[8]通过室内试验获得驾驶人在不同公路平面线形条件下的眼动参数, 分析驾驶人视觉搜索模式与公路平面线形的关系。徐慧智等[9]采集了小型客车和公交车驾驶人注视点分布数据, 构建了视点转移模型, 获得了决策阶段和执行阶段视点分布概率。郭应时等[10]通过实车实验获得驾驶人在城市道路和公路环境下的注视区域和注视目标特征, 对比熟练驾驶人和非熟练驾驶人的注视行为参数。袁伟等[11]解析了驾驶人的注视区域, 应用马尔可夫链理论获得驾驶人视觉转移特征。
由于驾驶人的视觉搜索模式影响行车安全, 国外多采用驾驶模拟的方法, 改变驾驶人群体和交通环境等相关参数, 获得驾驶人视觉行为特征; 国内主要采用道路试验的方法, 研究驾驶人视觉搜索模式。对超车过程的理论研究, 多见驾驶行为决策理论模型以及辅助决策系统[12, 13, 14], 但鲜有关于视觉行为的相关研究。因此, 本研究采用驾驶模拟的方法, 分析驾驶人在超车过程中扫视行为的特性, 揭示驾驶人在超车过程中的视觉转移和搜索模式, 为驾驶人信息搜索行为校正以及安全行车提供理论依据。
驾驶行为与驾驶人的性别、驾驶经验和性格等因素有关, 为了避免这些因素差异对试验结果的影响, 招募的被试驾驶人均为男性, 驾驶里程均在5万公里以上。通过网络和电话报名方式招募30名驾驶人, 其裸眼视力或矫正视力均为4.8以上, 被试驾驶人其他参数见表1。
| 表1 被试驾驶人信息 Table 1 Information of voluntary drivers |
1.2.1 驾驶模拟器
驾驶模拟器用于研究“ 人-车-路(环境)” 闭环系统的安全状态, 特别是险态工况下驾驶人生理、心理反应和车辆运动行为, 已成为安全可靠的技术手段。试验采用的驾驶模拟器见图1, 由车辆操作系统、车辆运动学仿真系统、六自由度车辆运动系统以及视觉场景显示系统等组成。
 | 图1 驾驶模拟器Fig.1 Driving simulator |
1.2.2 眼动仪
德国SMI HED型眼动仪见图2, 该眼动仪主要由主机、头盔、屏幕摄像头、眼部摄像头4部分组成, 可采集驾驶人眼部运动和视域环境视频, BEGAZE软件可对视频进行分析处理, 获得驾驶人扫视行为参数。
 | 图2 眼动仪Fig.2 Eye movement tracking device |
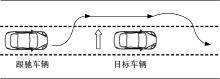
驾驶模拟器场景分为静态场景与动态场景两类, 静态场景通过Multigen Creator软件设计, 包括车道(路面、标线、隔离带等)和路侧景观(路树、建筑物等); 动态场景可通过Path Creator软件设计, 包括目标车辆和其他交通流等, 见图3。目标车辆类型设为大型车和小型车, 行驶速度设为60、70、80、90和100 km/h共5个水平。
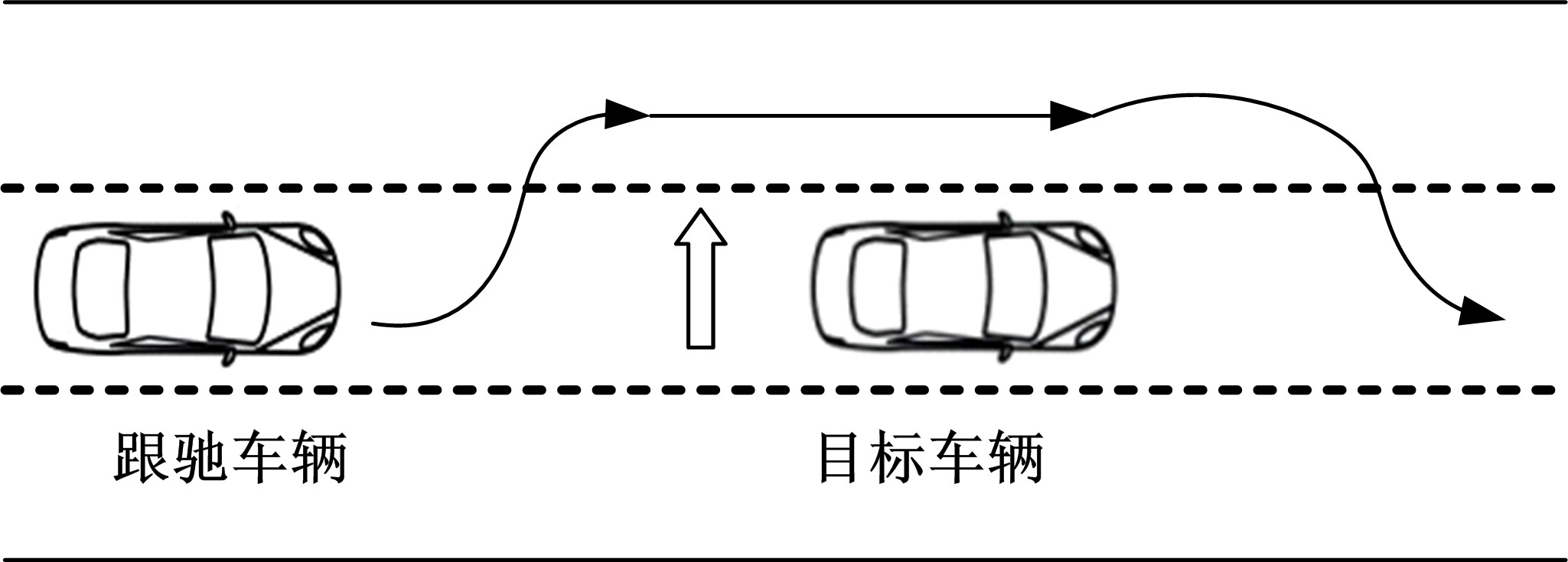 | 图3 超车场景Fig.3 Overtaking scenario |
首先驾驶人在适应场景中驾驶车辆3~5 min, 然后佩戴眼动仪, 完成五点标定。在模拟交通场景中, 驾驶人按照个人的驾驶习惯跟驰目标车辆, 看到超车指令后, 变换车道加速超车, 再驶回原车道。试验结束后, 采用BEGAZE软件提取驾驶人的眼动视频, 获得眼动行为数据。
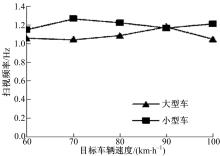
扫视频率为单位时间内驾驶人眼球扫描的次数, 图4为统计得到的驾驶人超车过程扫视频率。
 | 图4 驾驶人扫视频率Fig.4 Drivers’ saccade frequency |
由图4可见, 超车过程中驾驶人扫视频率与目标车辆的行驶速度关系不大, 目标车辆为大型车时, 扫视频率为1.0 Hz左右, 目标车辆为小型车时, 扫视频率为1.2 Hz左右。在各个行驶速度水平下, 目标车辆为小型车时, 驾驶人扫视频率较高, 目标车辆类型对驾驶人扫视频率有一定的影响。
扫视时间是指驾驶人平均执行扫视动作的时间, 图5为统计得到的驾驶人超车过程平均扫视时间。
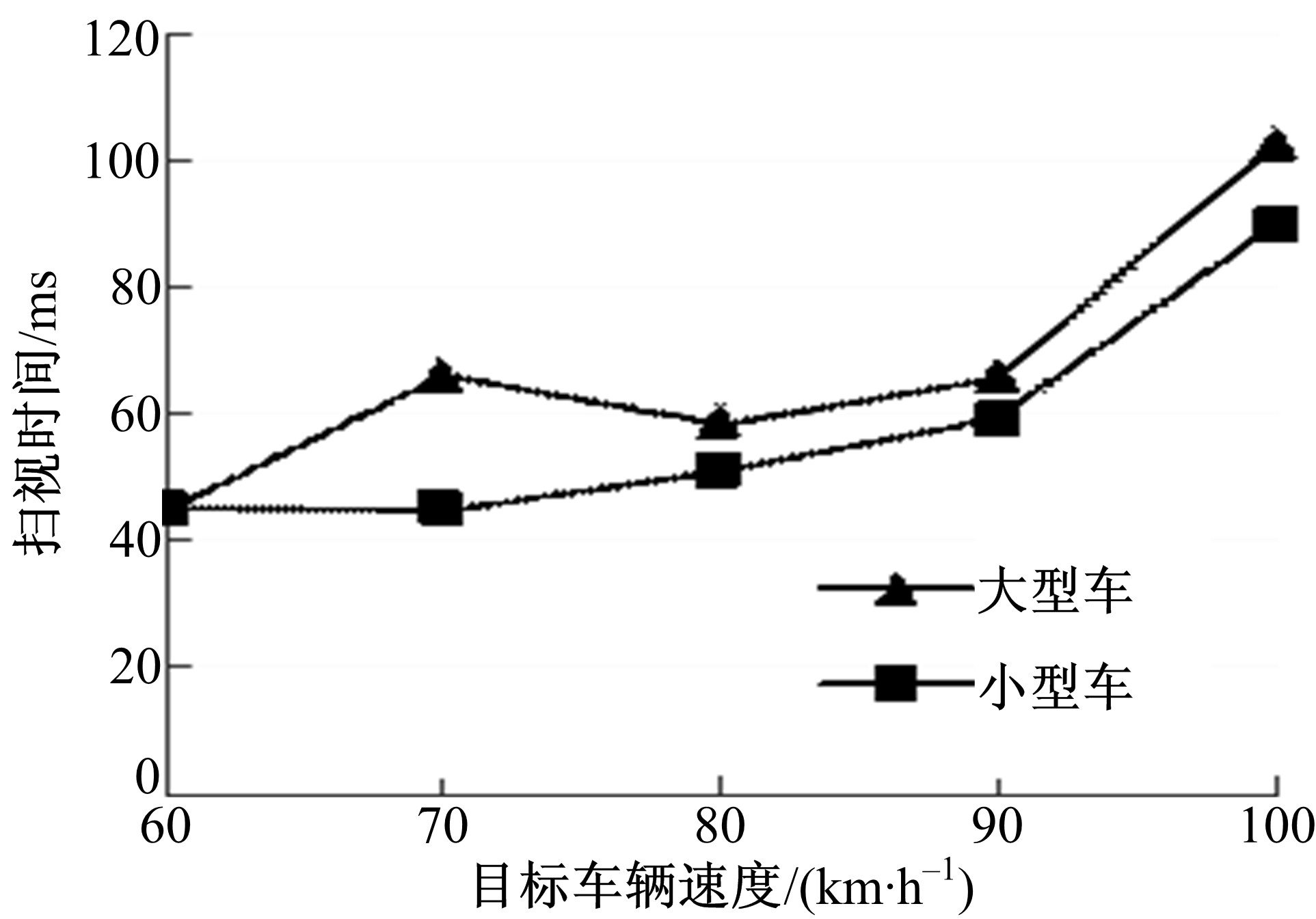 | 图5 驾驶人扫视时间Fig.5 Drivers’ saccade duration |
由图5可见, 随着目标车辆速度的提高, 驾驶人扫视时间逐渐增加, 目标车辆的速度为60 km/h时, 平均扫视时间分别为46.21 ms(目标车辆为大型车)和45.24 ms(目标车辆为小型车), 目标车辆速度为100 km/h时, 平均扫视时间分别为102.51 ms(目标车辆为大型车)和97.69 ms(目标车辆为小型车), 均增加1倍以上。在各个行驶速度水平下, 目标车辆为大型车时, 驾驶人的平均扫视时间较长, 目标车辆类型对驾驶人扫视时间有一定的影响。
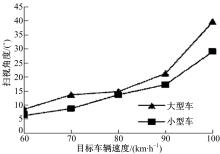
图6为统计得到的驾驶人超车过程平均扫视角度。
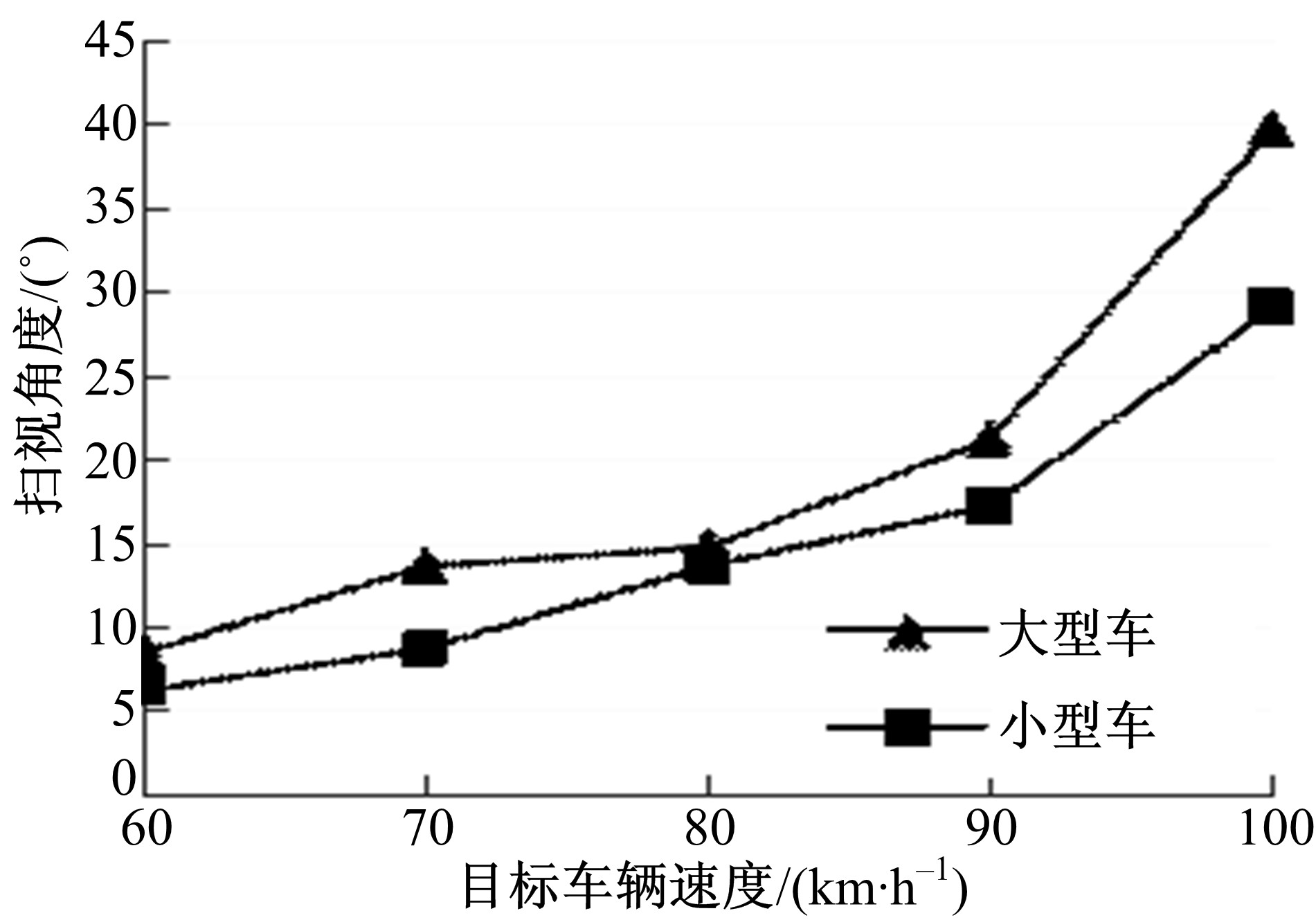 | 图6 驾驶人扫视角度Fig.6 Drivers’ saccade angular |
由图6可见, 随着目标车辆速度的提高, 驾驶人扫视角度逐渐增加, 目标车辆的速度为60 km/h时, 平均扫视角度分别为9.14° (目标车辆为大型车)和6.36° (目标车辆为小型车), 目标车辆速度为100 km/h时, 平均扫视角度分别为39.62° (目标车辆为大型车)和33.61° (目标车辆为小型车), 均增加4倍以上, 超车过程中目标车辆的行驶速度对驾驶人扫视角度的影响较大。在各个行驶速度水平下, 目标车辆为大型车时, 驾驶人的平均扫视角度较高, 目标车辆类型对驾驶人的扫视角度有一定的影响。
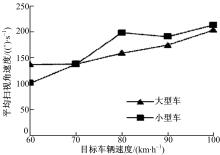
扫视角速度可以表征驾驶人视觉信息搜索的快慢程度, 也可以表征驾驶人的紧张程度。图7为驾驶人平均扫视角速度的统计结果。
 | 图7 驾驶人扫视角速度Fig.7 Drivers’ saccade angular velovity |
由图7可见, 随着目标车辆速度的提高, 驾驶人扫视角速度逐渐增加, 目标车辆的速度为60 km/h时, 平均扫视角速度分别为137.51(° )/s(目标车辆为大型车)和101.53(° )/s(目标车辆为小型车), 目标车辆速度为100 km/h时, 平均扫视角速度分别为204.10(° )/s(目标车辆为大型车)和213.48(° )/s(目标车辆为小型车), 超车过程中目标车辆的行驶速度对驾驶人的扫视角速度有影响。目标车辆为小型车且速度高于70 km/h时, 驾驶人的平均扫视角速度较高, 目标车辆类型对驾驶人的平均扫视角速度有一定的影响。
综合分析以上超车过程中驾驶人扫视行为参数可知, 目标车辆速度较快时, 驾驶人精力比较集中, 驾驶行为较谨慎, 信息搜索的精度和广度要求更高, 因此驾驶人扫视时间较长, 扫视角度和扫视角速度较大。大型车的几何尺寸较大, 影响跟驰车辆驾驶人的视野, 因此驾驶人精力更加集中, 在同一速度水平下, 单位时间内扫视的次数和扫视角速度较低。
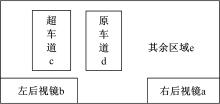
驾驶人在获取交通信息过程中, 注视点分布较广, 将如图8所示的视觉区域分为右后视镜(a)、左后视镜(b)、超车道(c)、原车道(d)和其余区域(e)五部分。其中, 原车道是指变换车道前跟驰车辆所在的车道; 超车道是指车辆换道后加速超越过程中所在的车道, 为目标车辆临近的左侧车道。
 | 图8 视觉驻留区域Fig.8 Visual stay areas |
视点转移概率为两视觉划分区域之间扫视的次数与各个区域之间总扫视次数的比值, 即:
式中:nij为驾驶人从i区域到j区域的扫视次数。
驾驶人超车过程中视点转移和驻留概率见表2。表2中的黑体数值表示驾驶人视点在该区域驻留时间概率, 即表示驾驶人对该区域的关注程度, 因此:
由表2可见, 驾驶人视觉驻留在原车道和超车道的概率之和均超过65%, 因此, 驾驶人主要从原车道和超车道获取交通信息; 目标车辆为小型车时, 在各个速度水平下, 视觉在原车道的驻留概率较高, 目标车辆为大型车时, 较低速度水平下(60 km/h、70 km/h), 视觉在原车道的驻留概率较高, 随着车速的提高, 驾驶人超车过程更加谨慎, 视觉在目标车道的驻留概率较高。
| 表2 驾驶人视觉区域转移和驻留概率 Table 2 Saccade transition and stay frequency between visual areas |
在各个速度水平下, 驾驶人视点在原车道和超车道之间的转移概率(Pcd、Pdc)明显较高, 其次为左后视镜到原车道(Pbd)、右后视镜到原车道(Pad)、超车道到左后视镜(Pcb)。可见, 驾驶人超车过程中注意力集中在原车道和超车道, 由于驾驶人位于偏左侧, 主要从左后视镜获取车辆后方的信息。
可见, 超车过程中, 驾驶人主要从超车道或原车道开始扫视右后视镜, 从超车道开始扫视左后视镜, 从原车道开始扫视其余区域。同理:
因此, 超车过程中, 驾驶人从右后视镜开始扫视, 下一视点主要落在原车道或超车道, 从左后视镜或其余区域开始扫视, 下一视点均主要落在原车道。
(1)目标车辆行驶速度不影响超车过程中驾驶人的扫视频率, 但与扫视时间、扫视角度和扫视角速度呈正相关关系。
(2)目标车辆为大型车时, 在各个速度水平下, 扫视时间较长, 扫视角度较大, 扫视频率较低, 扫视角速度较小, 驾驶人超车过程较为谨慎。
(3)超车过程中驾驶人更多关注原车道和超车道, 驾驶人视点在原车道和超车道之间的转移概率较高; 从超车道或原车道开始扫视到右后视镜、从超车道开始扫视到左后视镜及从原车道开始扫视到其余区域的概率较高; 从右后视镜、左后视镜或其余区域开始扫视, 下一视点落在原车道的概率较高。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|