

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
车载式液态融冰雪剂洒布机洒布质量的控制
[姚运仕1, 2  , 闫青青
, 闫青青1, 2 , 王瑞龙1, 2 , 苏沛1, 2 , 陈世斌1, 2 , 冯忠绪1, 2 ]
, 闫青青|
|


作者简介:姚运仕(1979-), 男, 教授,博士.研究方向:工程机械理论及作业质量控制.E-mail:yaoys@chd.edu.cn
为了提高车载式液态融冰雪剂洒布机的洒布质量,采用理论分析与试验研究相结合的方法,分析了车速波动和液态融冰雪剂输送泵的泵速波动对洒布质量的影响。提出了基于随速洒布的泵速调节控制系统。实车试验结果表明:当车速小于某临界车速时,泵速保持阈值不变,实际洒布量偏离目标洒布量,但保证不出现条纹状缺陷;当车速大于该车速时,输送泵的转速在控制系统作用下随车速波动自动调节,实际洒布量接近目标洒布量。
To improve the spraying quality of vehicle-mounted sprayer for liquid deicing and snow-melting agent, the influences of the fluctuations of the vehicle speed and the agent pump speed on the spraying quality are discussed. A pump speed control system is proposed under the condition of varying vehicle speed with the help of theoretical analysis and field test. Experiment results show that, when the vehicle speed is slower than a critical value, the pump speed maintains the threshold and the actual spraying volume deviates from the target value, but there is no striped spraying defect. If the vehicle speed exceeds the critical value, the pump speed would be automatically adjusted by the control system according to the vehicle speed and the actual spraying volume is close to the target value.
车载式液态融冰雪剂洒布机是一种专门针对喷洒液态融冰雪剂而开发的新型路面养护机械, 可灵活安装于不同型号的普通载车上, 能满足不同粘度、不同洒布量的施工要求, 洒布宽度无级可调。与沥青洒布车类似, 洒布量精度和洒布均匀度是其洒布质量评价的重要指标。国内外许多学者已经认识到沥青洒布质量控制的重要性, 并对沥青洒布质量的控制进行了研究。Airey等[1]认为沥青洒布质量与材料、洒布系统控制方式等有关。Gü rer等[2]认为沥青洒布均匀性是洒布质量的重要评价指标, 决定着封层路面的防水密封性能。Aktaᶊ等[3]认为碎石封层容易出现沥青溢出、碎石飞溅等病害, 沥青洒布质量不高会引起沥青与碎石间的粘结失效。Gransberg等[4]认为影响沥青洒布均匀性的因素包括洒布量控制策略、洒布管离地高度、喷嘴动态性能、风速、行驶速度等几方面, 条纹状缺陷是用来评价洒布缺陷的主要指标, 多重洒布可提高洒布质量。Gransberg等[5]还认为沥青喷洒需形成均匀等厚度的雾状沥青膜, 这样沥青路面整体力学特征是柔性的, 能增强路面抗裂性能、治愈路面龟裂网、减少路面反射裂痕、提高路面防渗水性能。顾海荣等[6]认为沥青洒布精度可通过检测车速调节沥青泵转速来控制, 这种控制可保证沥青喷嘴出口流量保持不变, 喷洒均匀度和扇面形状也不发生改变, 洒布精度较高。焦生杰等[7]引入容积效率修正系数和行驶速度修正系数来降低路面状况、车辆负荷变化等因素对洒布均匀性的不良影响。本文以新开发的液态融冰雪剂洒布机为对象, 重在讨论车速波动和液态融冰雪剂输送泵的泵速波动对洒布质量的影响, 分析随速洒布控制策略, 并进行实车试验, 以期为工程应用提供有益借鉴。
洒布量是指喷洒后单位路面面积上的液态融冰雪剂体积。洒布量精度是实际洒布量与目标洒布量的偏差, 与洒布量的控制有关, 是洒布质量评价指标之一。洒布均匀度主要指不同位置间的实际洒布量偏差, 包括横向洒布量偏差和纵向洒布量偏差。在其他设计参数确定的条件下, 洒布均匀度也与洒布量的控制有关, 是洒布质量评价的另一个重要指标。可见, 洒布质量与洒布量的控制密切相关。影响洒布量的因素较多, 包括喷洒机构的结构参数、车速和输送泵转速波动等, 在其他结构参数确定的条件下, 洒布量大小与车速成反比, 与泵速成正比, 二者的波动都会引起洒布量的变化。本文重点讨论载车车速波动和输送泵的泵速波动对洒布量的影响, 以洒布量精确控制为目标, 兼顾起步停车阶段不出现洒布缺陷的要求, 设计了泵速随车速自动调节的控制系统, 即随速洒布控制系统。
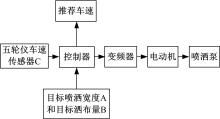
施工车辆在档位不变的情况下, 发动机转速、车轮变形系数和地面滑转系数都会影响车速的稳定性[8]。较典型的工况主要有起步停车过程、行驶过程中的加速、减速过程和近似匀速过程[9]。为了保证各工况下洒布量控制精度, 输送泵泵速需根据车速变化进行控制, 即所谓进行随速控制, 控制原理如图1所示, 该控制过程为开环控制。
 | 图1 泵速控制原理图Fig.1 Schematic digram of pump speed control |
图1中控制器根据A、B和目标泵速计算出推荐车速供司机参考[10]。当司机选择合适档位开始洒布作业时, 控制器再根据A、B及C计算出输送泵所需的转速, 并通过变频器对电动机进行控制, 进而实现输送泵转速的调节。其中, 控制系统内设的目标泵速n目标与推荐车速v推荐间的关系如下:
式中:n目标为输送泵目标转速; V为输送泵额定排量; λ 目标为目标洒布量; B为目标洒布宽度, 与打开的喷头个数有关; v推荐为推荐的载车作业车速。
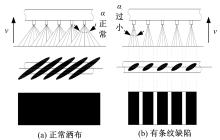
图1中控制器也是根据式(1)由A、B及C计算得到输送泵所需的转速, 但此时的车速是由五轮仪车速传感器实时检测的实际车速。由式(1)知, 当输送泵的排量和洒布宽度不变时, 推荐车速与目标泵速成正比。当车速很小时, 若通过该关系式调节泵速, 则可能导致输送泵因转速过低而输出的液态融冰雪剂流量小、压力不足, 喷洒时雾化不完全, 无法形成一定角度的喷洒扇面, 导致喷洒后路面出现未完全覆盖的条纹, 如图2所示。此时, 为保证泵送压力和流量, 避免出现条纹缺陷, 泵速需大于或等于某个值, 即当车速过小时, 泵速保持n阈值不变, 可通过式(2)求得n阈值:
式中:λ min为不出现未完全覆盖条纹时的临界洒布量; v临界为不出现未完全覆盖条纹时的临界车速。
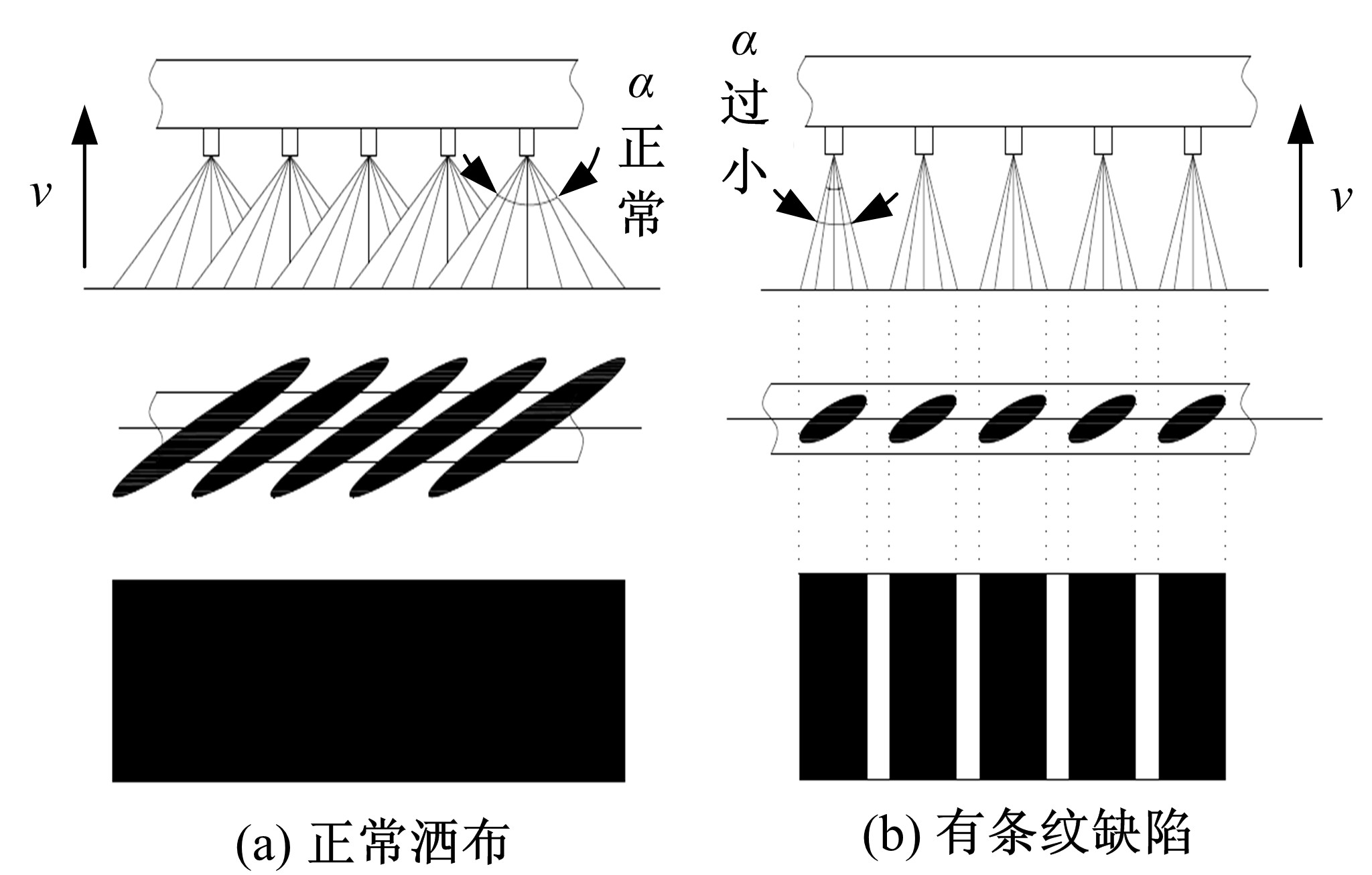 | 图2 不同洒布质量示意图Fig.2 Schematic diagram of different spraying quality |
可见, 当实际车速低于v临界时, 实际泵速应与车速无关, 始终等于n阈值, 实际洒布量随车速增加而减小, 但不出现条纹缺陷, 这一阶段实际洒布量和目标洒布量有较大偏差。当实际车速高于v临界时, 实际泵速应随车速变化而自动调节, 以使实际洒布量等于目标洒布量, 从而保证实际洒布量不随车速的变化而变化。
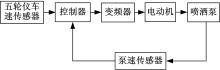
试验样机的液态融冰雪剂输送泵由电动机通过皮带轮带动。传动过程中, 可能由于带轮打滑等原因导致输送泵的实际转速低于目标转速, 造成液态融冰雪剂的实际喷洒量低于目标喷洒量。因此, 应对输送泵实际转速进行控制。
实际上, 经常出现车速波动和泵速波动同时存在的情况, 所以应在图1的基础上采集输送泵的实际转速给控制器, 形成闭环控制, 以便消除电动机及皮带传动打滑引起的输送泵转速误差, 如图3所示。由图3可知, 控制器同时处理来自车速波动引起的泵速偏差信号和来自反馈回路的偏差信号, 控制器可采用模糊PID控制器, 该控制系统采用闭环控制[11, 12]。
 | 图3 泵速闭环控制原理Fig.3 Closed-loop control principle for pump speed |
五轮仪和测速光电码盘工作可靠, 结构比较简单[13, 14]。因此样机设计时, 车速采用五轮仪检测, 泵速采用测速光电码盘进行检测, 试验样机实物见图4, 载车是某轻型卡车。
 | 图4 液态融冰雪剂洒布机Fig.4 Liquid deicing and snow-melting agent sprayer |
为了评价液态融冰雪剂洒布机的作业质量, 验证泵速调节控制系统的可行性, 对洒布均匀度进行了试验。试验内容主要包括匀速阶段洒布机的横向洒布均匀度、纵向洒布均匀度和起步停车阶段的纵向洒布均匀度。
参照标准《沥青洒布车/机》(JT/T 276-2004), 试验时样机以6 km/h左右的速度匀速行驶, 洒布机目标洒布量为1.0 L/m2。测量横向洒布均匀度时, 在试验路段放置20个采样板(200 mm× 200 mm), 布置方式见图5。测量纵向洒布均匀度时, 放置16个采样板(200 mm× 200 mm), 布置方式见图6。
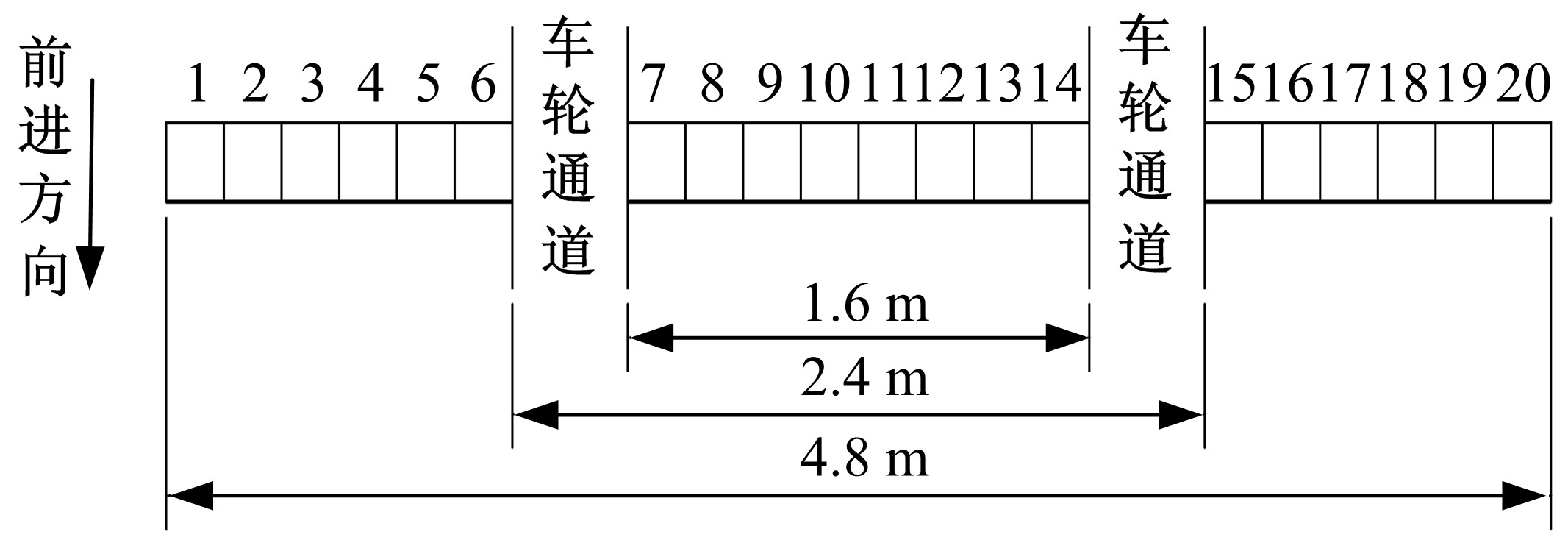 | 图5 横向均匀度采样板布置图Fig.5 Sample arrangement of transverse uniformity |
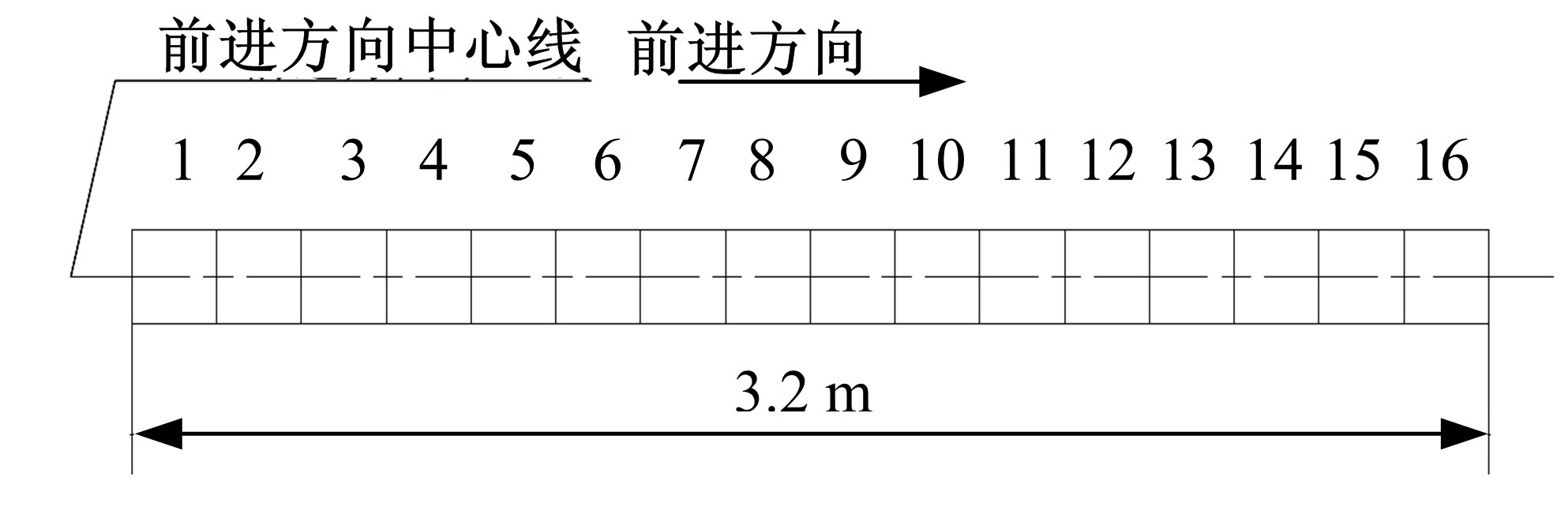 | 图6 纵向均匀度采样板布置图Fig.6 Sample arrangement of longitudinal uniformity |
试验结果见表1, 表中洒布量可由测得的采样板上融冰雪剂质量按式(3)计算得到。
式中:λ 实际为实测洒布量; m为采样板上液态融冰雪剂质量; ρ 为液态融冰雪剂密度, 单位为g/cm3。
| 表1 匀速工况均匀度试验结果 Table 1 Test results of uniformity coefficient in condition of constant speed |
由表1可知:横向洒布量的平均值和纵向洒布量的平均值均稍低于目标值, 说明所设计的泵速调节控制系统存在偏差, 最大洒布偏差小于4%, 满足工程要求; 纵向洒布量的标准差小于横向洒布量的标准差, 说明纵向洒布比横向洒布更均匀; 横向洒布量最大偏差为-4%, 纵向洒布量最大偏差为-3%, 二者分别小于行业标准规定的± 9%和± 6%, 说明所设计的泵速调节控制系统合理。
根据表1绘制横向洒布量和纵向洒布量分布图, 如图7所示。由图7可知:载车匀速行驶时, 液态融冰雪剂的横向洒布量和纵向洒布量均在1.0 L/m2左右波动,
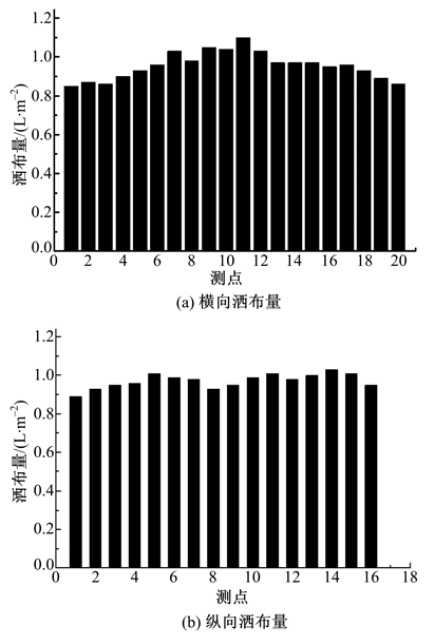 | 图7 匀速工况洒布均匀性试验结果Fig.7 Test results of uniformity in condition of constant speed |
最大洒布偏差满足行业标准要求; 横向洒布量近似呈中间高两边低的趋势, 产生这一现象的主要原因是存在管路沿程压力损失, 导致副喷洒管的洒布量比主喷洒管的稍小; 纵向洒布量近似成波浪分布, 产生这一现象的主要原因是控制系统存在微小滞后, 车速波动与泵速跟踪存在时间差, 但单位面积洒布量满足标准规定要求。
匀速阶段均匀度试验结果说明横向均匀度满足要求, 起步停车阶段的横向均匀度试验省略。起步停车阶段纵向均匀度试验可检测样机低速下泵速控制策略的合理性。试验时, 采样板放置在车辆前进方向中心线上, 每两个采样板(测点)间隔1.5 m, 如图8所示。
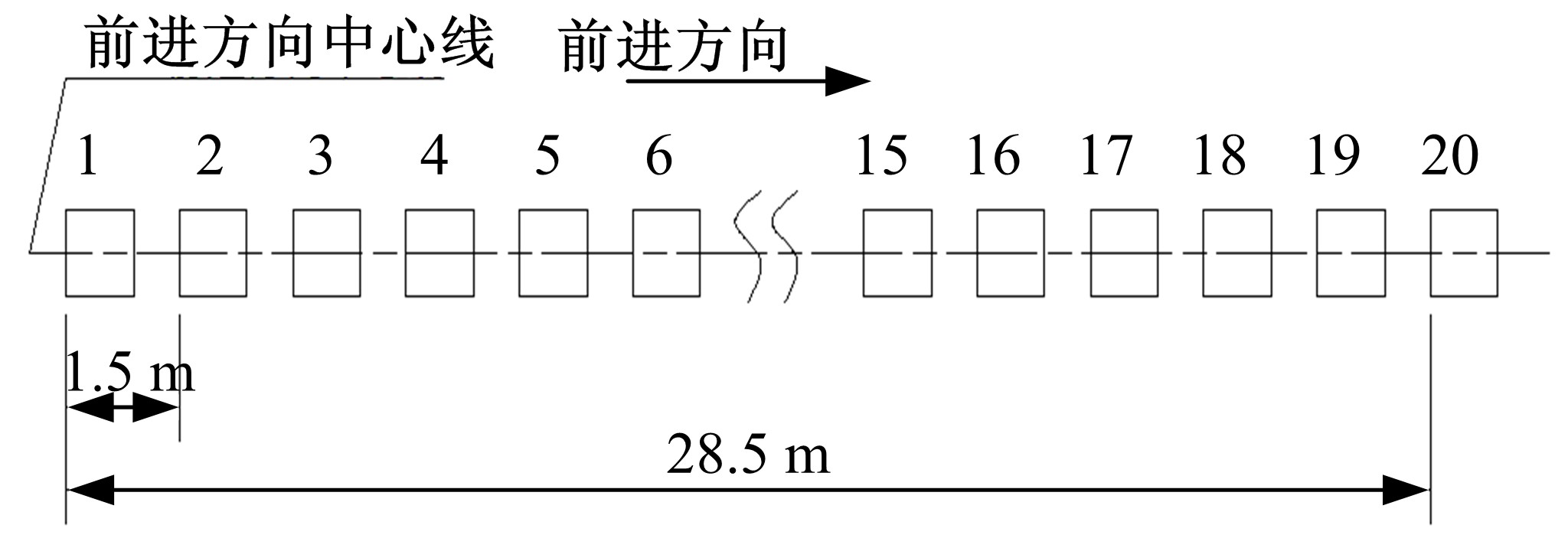 | 图8 起步停车阶段采样板布置图Fig.8 Sample arrangement in starting and stopping process |
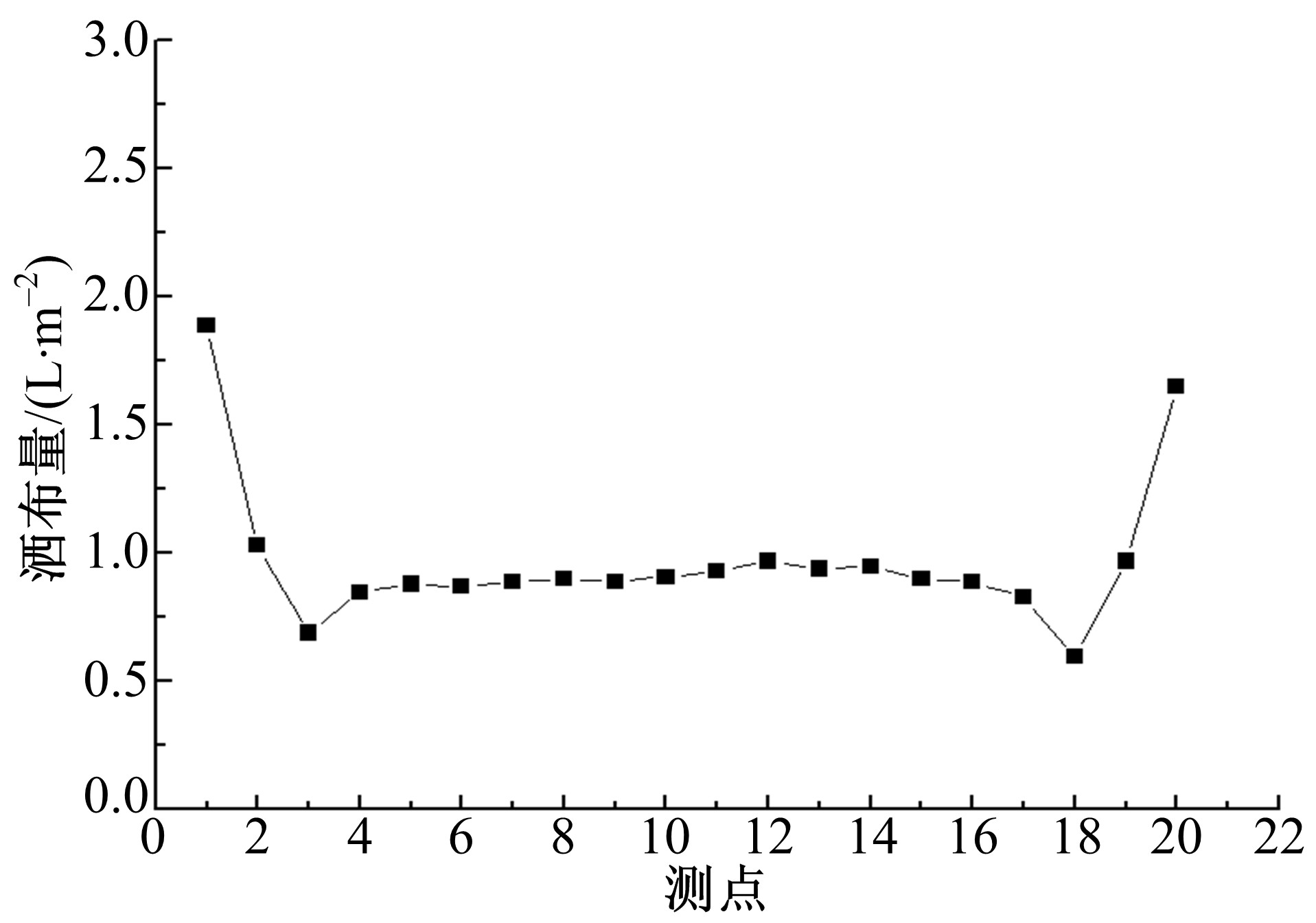
试验车从测点1处开始从零加速前进, 在测点10附近升到6 km/h左右, 接着减速到测点20处停车。起步停车过程洒布量试验结果见表2。
| 表2 起步停车阶段纵向洒布均匀度试验结果 Table 2 Test results of longitudinal uniformity coefficient in starting and stopping process |
根据表2绘制起步停车阶段纵向洒布量分布图(见图9)。由图9可知:在测点4和测点6之间, 洒布量在1.0 L/m2附近波动, 这一阶段在控制系统控制下, 泵速基于流量控制; 表2表明这一阶段洒布量的最大洒布偏差为-4.4%, 满足行业标准要求。测点1到测点2, 洒布量呈下降趋势, 是因为这一阶段车速低于临界车速v临界, 根据控制策略, 输送泵泵速保持在不出现洒布条纹缺陷的最低泵速n阈值不变, 车速越低, 洒布量越大。测点1处载车刚起步, 车速非常低, 但泵速为n阈值, 洒布量比较大。在载车到达测点2之前, 泵速保持n阈值不变, 随着车速增加洒布量不断下降, 但不会出现条纹状缺陷。载车到达测点2时, 车速已上升至流量控制的临界车速v临界, 控制系统将按流量控制方式使泵速跟踪车速, 并随车速自动调节, 此时, 泵速由n阈值不断升高。由于泵速调节的时滞性, 载车已从测点2前进至测点4, 此时泵速才跟踪到位, 洒布量达到目标洒布量, 因此测点2到测点4洒布量呈上升趋势。测点4后的高车速阶段, 尽管车速波动, 但由于是随速流量控制, 洒布量波动不大, 始终保持在目标洒布量附近。到测点16后, 载车减速至v临界, 此过程与测点1到测点4过程车速变化相反, 洒布量变化曲线与之基本对称。虽然起步和停车过程液态融冰雪剂喷洒过多, 但保证不出现条纹状缺陷。实际施工中, 洒布机并不频繁起步停车, 但要求融冰雪剂能覆盖路面不出现条纹缺陷, 此种控制策略较合理。
 | 图9 起步停车阶段纵向均匀性试验结果Fig.9 Test results of longitudinal uniformity in starting and stopping process |
(1)洒布精度和洒布均匀度都与洒布量控制有关, 为满足洒布量控制要求, 载车车速波动时, 泵速应随之自动控制。
(2)当载车以大于v临界的速度匀速行驶时, 洒布量精度和最大洒布偏差小于-4%, 满足设计要求。
(3)在起步、停车过程中, 当车速低于v临界时, 泵速保持n阈值不变, 实际洒布量偏离目标洒布量, 但不出现条纹状缺陷; 当车速高于v临界时, 泵速随车速自动调节, 实际洒布量接近目标洒布量。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|