


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
空间二维运动机构的热真空准加速寿命试验设计
[上官爱红1, 2  , 张昊苏
, 张昊苏1, 2 , 王晨洁1, 3 , 秦德金1 , 刘朝晖1 ]
, 张昊苏|
|


作者简介:上官爱红(1981-),女,高级工程师.研究方向:空间跟瞄系统环境的适应性、寿命及热控制.E-mail:xiner@opt.ac.cn
针对国内外运动机构准加速寿命试验设计主要集中在部件上,不能反映整机在轨性能的问题,本文对空间二维运动机构的构型和润滑方式进行了分析,确定了空间二维运动机构热真空准加速寿命试验设计中的5大要素和各要素的设计方法,为了考核整机运动性能设计了试验测试内容和测试的方法,并确定了终止试验的失效判据。设计了某空间二维运动机构的热真空准加速寿命试验。通过试验,获得了一系列反映运动机构整机性能指标的试验测试数据,可以根据这些试验数据评估空间二维运动机构的在轨寿命,并且试验结果得到了在轨应用,这说明本文方法有效可行。
The domestic and abroad thermal vacuum quasi-accelerated life tests of two-axis gimbals are investigated. It is shown that almost all the tests are focused on the parts rather than on a full gimbal, which can not reflect the performance of the full gimbal. According to the analysis of the structure and lubrication mode of the thermal vacuum quasi-accelerated life tests of two-axis gimbals, the five main elements and their design methods are determined. The test contents and methods are designed for the motion performance examination of a full gimbal, and the failure criterion is given to control the test process. A thermal vacuum quasi-accelerated life test is designed in accordance with the design method of the element design method. A series of test data about the motion performance of the two-axis gimbal is acquired by experiments, which can evaluate the in-orbit life of the space two-axis gimbal. The in-orbit application of the obtained results demonstrate that the designed thermal vacuum quasi-accelerated life test method for the space two-axis gimbal can satisfy the test requirement and it is effective and feasible.
空间二维运动机构越来越被广泛应用到空间载荷中, 如卫星SADA、扫描机构、二维跟踪转台等, 运动机构的寿命和可靠性也越来越受到重视, 但通过实验来验证其寿命和可靠性目前来说还是一个难点[1, 2]。对于空间机构来说, 空间环境是造成其故障的主要原因。特别是运动机构, 空间环境对其影响更加不可忽略, 所以必须在发射前, 在地面进行充分的热真空寿命试验, 通过解决试验过程中暴露的问题来提高空间运动机构的可靠性[3]。
空间二维运动机构的寿命要求一般都在一年以上甚至长达十几年, 若进行等寿命的地面试验, 不仅费用昂贵难以为工程所接受, 最重要的是时间进度也不允许[4]。因此, 空间二维运动机构的热真空加速寿命试验对于降低试验费用、缩短试验时间, 保证运动机构长寿命高可靠性具有重要意义。
目前国内外运动机构寿命试验的研究工作主要集中在部件级如轴承等, 未涉及整机的寿命试验设计、性能检测等。因此虽然轴承进行了寿命试验, 但不能很好地反映整机寿命期的性能, 无法为在轨运行提供试验支撑。本文对空间二维运动机构整机进行了热真空准加速寿命试验设计, 试验中检测了运动机构的性能数据, 为在轨运行提供试验支撑。
空间二维运动机构已广泛应用在空间目标监视、导弹防御系统以及空间光通信等多个领域。
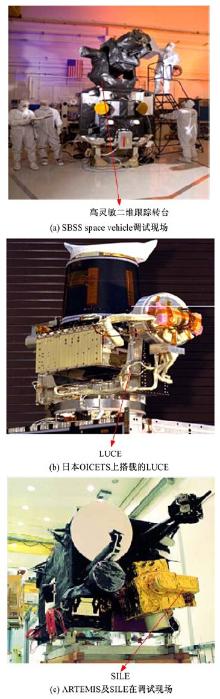
SBSS是美国国家航空航天局研制的实现太空态势的实时感知能力的必要组成部分, 其中SBSS space vehicle上搭载了一个高灵敏二维跟踪转台。图1(a)为SBSS space vehicle调试现场。
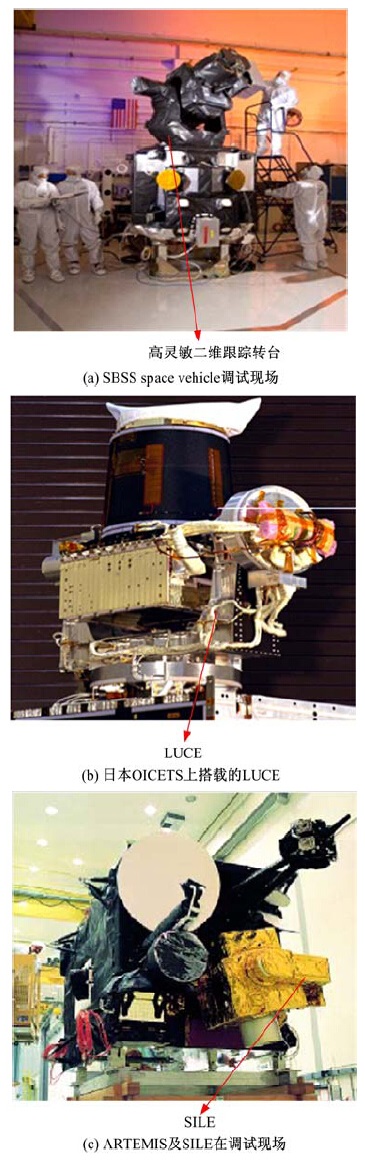 | 图1 在轨应用的二维运动机构Fig.1 Two-axis gimbals in orbit |
日本OICETS(Optical inter-orbit communication engineering test satellite)是用于空间光通信的测试卫星, 可实现两颗卫星间的相互轨道通信, 星上载有名为LUCE的带有空间捕获、跟踪及指向机构的激光通信载荷, 图1(b)为LUCE, 从图中可以看到搭载了二维跟踪转台。
ARTEMIS是欧洲宇航局发射的一颗用于空间光通信的载荷卫星, 搭载二维跟踪转台称为SILE, 具有捕获、跟踪、指向功能, 图1(c)为ARTEMIS及SILE在调试现场。
目前国内有多个二维转台已经在轨使用, 比如CE-3上搭载了二维反射镜转台, 目前转台已经发射入轨, 完成任务要求。
寿命试验是为了测定产品在规定条件下的寿命所进行的试验。加速寿命试验是为缩短试验时间, 在不改变故障模式和故障机理的条件下, 用加大应力的方法进行的寿命试验。根据加速寿命试验数据, 运用加速寿命曲线或加速方程, 来外推正常使用状态(即正常应力水平)下产品的寿命, 可以实现产品在正常使用状态下寿命的验证[4]。
根据施加应力方式的不同, 可分为恒定应力加速、步进应力加速和序进应力加速寿命试验3种。这3种方法都是将产品做到失效为止。
由于航天载荷的制造成本非常高, 不可能做出几个一模一样的空间运动机构仅用于加速寿命试验, 也不可能做到失效, 一般都是以任务要求为试验结束的依据, 满足任务要求即可, 所以确切地说空间二维运动机构的加速寿命试验一般应为“ 准加速寿命试验” , 欧洲和美国包括国内近几年的加速寿命试验也都为“ 准加速寿命试验” 。
欧洲空间研究机构成立了欧洲空间摩擦学实验室(European space tribology laboratory, ESTL), 在20世纪70~80年代先后对具有长寿命要求的几种太阳电池翼驱动机构、天线指向机构、摆动机构和天线消旋机构开展了准加速寿命试验(见表1)[4]。这些准加速寿命试验(热真空加速寿命试验)具有如下特点:
(1)试验对象都是低速固体润滑的航天器机构, 最终将轴承作为决定机构寿命长短的重点考核对象。
(2)这些试验通常都是通过有限度地提高机构转速或工作频率来实现“ 加速” 的。都是基于“ 固体润滑磨损寿命主要取决于机构行程而与转速无关(在一定范围内)” 的假设, 把机构“ 在轨任务时间要求” 折算成相应的“ 转数要求或工作次数要求” 的基础上进行的。
| 表1 ESTL固体润滑航天器机构热真空准加速寿命试验 Table 1 ESTL thermal vacuum quasi-accelerated life test for solid-lubricated space mechanisms |
国内近几年也开展了一些空间运动机构(或组件)的准加速寿命试验, 中国空间技术研究院、洛阳轴承研究所、浙江大学、北京航空航天大学都有相关报道[4]。
国内关于空间运动机构热真空准加速寿命试验情况如表2所示。
| 表2 国内关于空间运动机构热真空准加速寿命试验 Table 2 Thermal vacuum quasi-accelerated life test for rotated mechanisms in domestic |
从国内外的准加速寿命试验来看, 运动机构的寿命和可靠性比较受重视, 各国都进行了一定程度的研究。试验中, 真空度从几十Pa到10-8Pa不等, 对于不同的试验对象, 试验温度也各不相同。从这些试验可以看出, 由于运动机构的结构各不相同、寿命要求也不尽相同, 所以需要针对运动机构不同的结构、润滑模式以及工作方式设计准加速寿命试验。
空间二维运动机构有多种结构, 主要有L、U、T三种结构形式, 如图2所示。
 | 图2 二维运动机构结构示意图Fig.2 Structural schematic diagram of two-axis gimbal |
T型结构具有无转动死区的优点, 但由于负载的体积及转动惯量较大, 导致随机力矩抖动增加, 使得结构使用受限制, 同时由于载荷偏置, 需要增加额外负载用于动态平衡。
L型结构虽然从动力学角度出发可以应用, 但由于轴系较短, 在同等加工精度情况下, 测角误差、指向误差以及跟踪误差都较大。
U型结构得到广泛应用, 具有精度高, 结构性能稳定等一系列优点, 其动力学特性也较优, 并且负载处于两支撑点中间, 力学特性良好。
随着U型结构空间二维运动机构在多个领域的应用, 其可靠性备受关注, 因此需要重点研究U型结构的空间二维运动机构的热真空准加速寿命试验方法, 来提高空间二维运动机构的可靠性。
对于空间运动机构来说, 所安装的轴承需要采用不同的润滑方式。这是由于在空间真空环境中, 固体表面会失去所吸附的气体, 固体表面相互接触时便发生不同程度的黏合现象, 即引起冷焊。由于冷焊可能使轴承出现不能正常动作、损坏等现象, 为此采用在轴承套圈沟道上溅射MoS2固体膜与自润滑材料保持架相结合的方式, 这是空间轴承润滑的一种常用和有效的方式。
空间二维运动机构的热真空准加速寿命试验设计时需要注意以下几个方面:
(1)由于空间二维运动机构在轨的工作一般是捕获和跟踪, 在轨工作模式一般为间歇式工作模式, 每次工作间隔时间不定, 最短间隔时间可能几分钟, 最长间隔时间可能几天。如果按1∶ 1工作时间间隔进行试验模拟, 不仅试验时间长导致费用高, 并且由于间隔时间的随机性, 无法进行试验。经过对运动机构轴系进行分析, 认为固体润滑运动轴系的寿命与转动次数有关, 间隔时间对二维运动机构转动失效没有影响, 因此模拟时可进行连续转动模拟。
(2)与有些试验中试验对象为轴承相比, 空间二维运动机构热真空准加速寿命试验中的试验对象为整机, 它是一个复杂的、集合了各种部件的转动机构, 它对稳定度、精度有要求, 不仅仅局限于“ 转动” , 还需满足精度和平稳度等要求, 这样需要在寿命试验中通过延长试验时间来检验二维运动结构的变形能否满足设计要求, 比如U型架等主要结构体经过地面的储存、运转和发射的冲击等均会产生内部应力, 在轨后应力缓慢释放从而导致结构体变形, 这个过程比较缓慢, 一定时间的寿命试验可以部分考核其变形。
(3)根据二维运动机构在轨工作状况及考核情况, 一般设计二维运动机构在极端工作温度下进行寿命试验。由于在高温或低温条件下工作, 其温度加速因子无法准确确定对二维运动机构的寿命影响情况, 所以在试验设计时仅把温度对二维运动机构的影响考虑为试验的裕度, 试验中折算的二维运动机构在轨工作时间大于在轨寿命要求。
对于空间二维运动机构来说, 热真空准加速寿命试验设计主要包含5大要素:
(1)轴系所施加的预紧力。由于轴系的预紧力影响轴系的寿命, 要根据二维运动机构中轴系的实际使用情况, 施加合适的预紧力。
(2)二维运动机构的转动速度。二维运动机构在轨转动速度有不同的要求, 要根据在轨情况设定合适的转动速度。
(3)真空度。参照国内外的经验, 根据空间二维运动机构整机的尺寸和线缆等非金属出气情况, 以及真空罐的试验条件, 确定合适的真空度。
(4)试验温度范围。充分考虑空间二维运动机构在轨工作温度和极端工作温度情况, 以及真空罐的试验条件, 确定合适的试验温度范围。
(5)二维运动机构的工作次数。空间二维运动机构在轨工作时, 在轨寿命时间若按N年计算, 若1天工作m次, 那么在轨N年工作周期数约为365 mN次, 另外地面调试及试验折合为n次。参照中国空间技术研究院对于寿命试验时间与工作时间的关系, 寿命试验时间为在轨工作时间和地面调试、试验时间总和的q倍以上, q一般取值在2~4区间, 根据任务不同取值也不相同。那么二维运动机构工作次数为q× (365mN+n)次, 折合到寿命试验中, 若二维运动机构一天24 h连续转动, 每小时转动p次, 试验时间(单位为h)约为:
3.2.1 通过对电机进行高精度的电流测量反映轴系磨损情况
空间二维运动机构是通过电机驱动, 电机的驱动力矩用来克服轴系的摩擦力矩和导线的线绕力矩, 还有一部分是运动机构加速所用力矩。即:
式中:M电机为电机输出力矩; Mf为运动机构工作时的摩擦力矩; M导为导线的线绕力矩; M加速为二维运动机构加速时需要的力矩。
二维运动机构转动时的摩擦力矩由下面公式求得:
式中:Ff为转动机构的摩擦力; F正为轴系施加的预紧力; f为摩擦因数。
而电机的输出力矩可通过下面的公式求得:
式中:km为力矩系数; i为电机电流。
从式(1)~(4)可看出, 若摩擦力矩发生变化, 那么M电机就会变化, 从而体现在驱动二维运动机构的电机电流发生变化。为此需要对二维运动机构电机的输出电流进行高精度实时采集, 并且显示和存储, 然后通过判断电流的变化来判定二维运动机构在真空中进行寿命试验的磨损情况。为此可选择多通道波形记录仪, 长时间记录电流的波形, 图3为某试验中所记录的电流曲线。
 | 图3 试验中记录的电流曲线Fig.3 Current curve recorded in test |
3.2.2 采用光纤陀螺测量速度和速度稳定度
在二维运动机构的方位轴和俯仰轴各安装一个光纤陀螺, 二维运动机构转动时, 通过光纤陀螺对转轴的角速度ω 进行直接测量, 可以通过积分获得转动速度和速度稳定度。
光纤陀螺有“ 零漂” , 目前大多光纤陀螺生产方可以提供零漂曲线, 在对采集数据处理时将零漂数据叠加进采集数据。
(1)二维运动机构堵转
二维运动机构的一类失效为二维运动机构不能转动, 即堵转, 这时必须立即停止试验, 打开真空罐, 寿命试验结束。
(2)电机电流增幅超过100%
二维运动机构电机工作时, 通过电流检测其工作情况, 二维运动机构启动时由于需要从静止启动, 那么M加速较大, 启动摩擦力矩Mf也较大, 而M导与运动机构的位置有关, 所以二维运动机构启动时电流较大; 二维运动机构平稳工作时, M加速为0, 电机输出电流只用于克服摩擦力矩和线绕力矩。如果轴系出现磨损, 或结构变形, 将引起摩擦力矩变化, 那么势必引起电机电流变化, 与二维运动机构正常工作的电流变化曲线相比, 将会有一定的增幅, 那么考虑一定的余量的情况下, 启动时的电流增加超过100%, 则认为二维运动机构已经失效, 寿命试验结束。
(3)摩擦力矩增幅超过100%
试验开始时测得二维运动机构方位轴和俯仰轴转动时的摩擦力矩, 在试验中通过测量两轴的速度平稳性可以计算出摩擦力矩, 根据航天器机构的设计要求, 并参考文献[5-8], 当轴系摩擦力矩增加到100%, 则认为轴系失效, 寿命试验结束。
在试验中, 上述三种失效方式任何一种存在即认为寿命试验结束; 若试验中这三种失效方式都未发生, 则按设计的试验时间完成准加速寿命试验。
对某空间二维运动机构进行整机试验, 运动机构中安装了1#和2#轴承, 润滑方式为内外滚道溅射MoS2, 1#轴承预紧力为150 N, 2#轴承预紧力为300 N。轴系的运动形式为等速大范围往复转动, 转动速度为1 (° )/s和4 (° )/s, 在轨要求工作寿命为4年, 为此设计了热真空准加速寿命试验。
将某空间二维运动机构在西安光学精密机械研究所KM3真空罐中进行了热真空准加速寿命试验, 试验条件为:真空度为2.0× 10-5Pa; 温度条件为高温55 ℃, 低温-15 ℃; 试验次数为36 000。
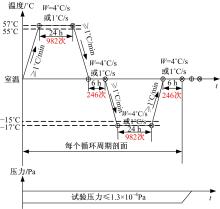
在试验中, 各轴承的轴向预紧力不变, 在轨工作时间为4年, 工作次数为14 000次, 地面试验折合工作次数4 000次, 取q=2, 那么设计寿命试验工作次数为36 000次。图4为试验中所用真空罐及地检设备。图5为每个循环周期的剖面图。
 | 图4 热真空准加速寿命试验所用KM3真空罐Fig.4 KM3 vacuum container used in thermal vacuum quasi-accelerated life test |
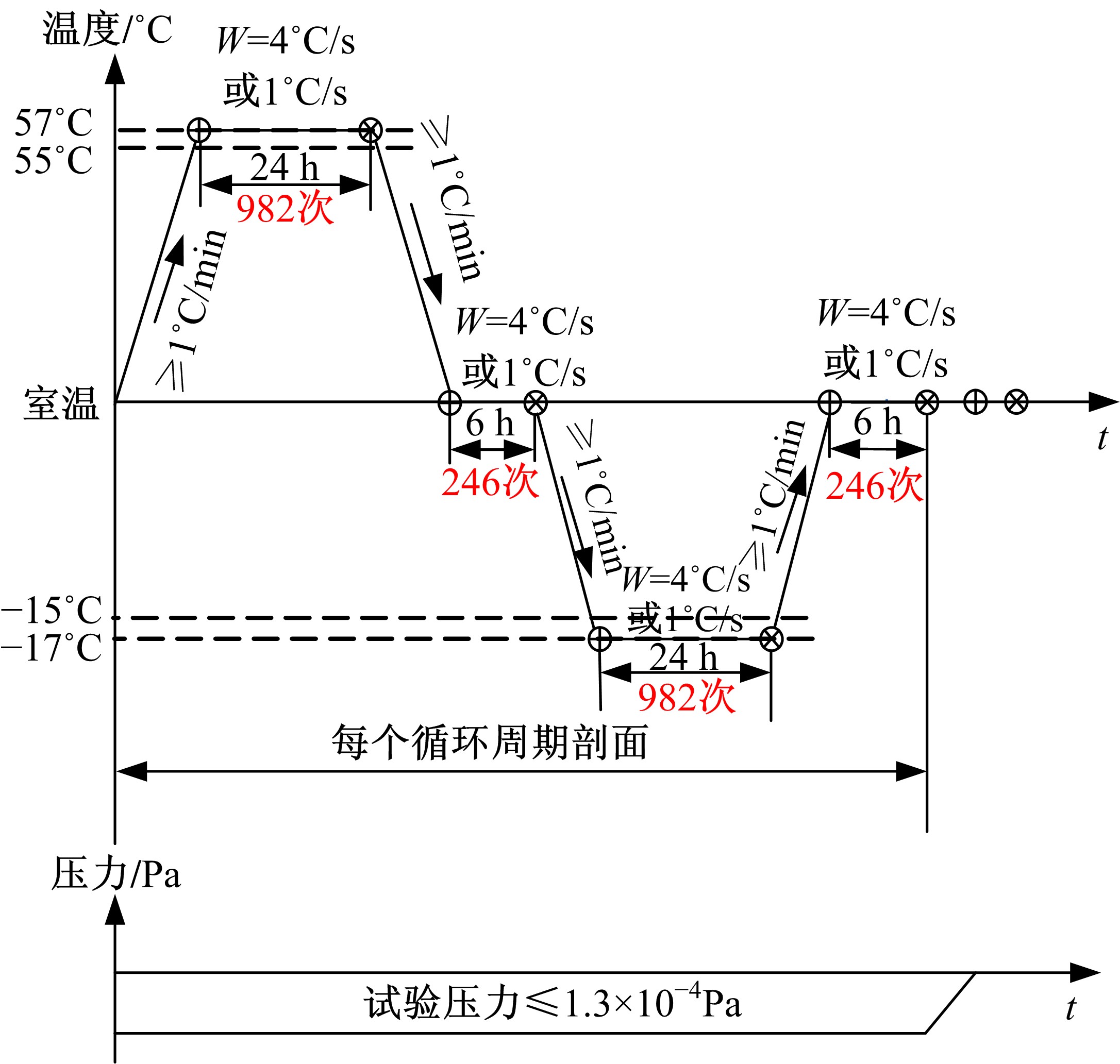 | 图5 每个循环周期剖面图Fig.5 Work section in every cycle |
试验过程中对电流和摩擦力矩进行了实时检测, 在高温或低温时电机电流增加幅度较大, 但回到常温时电流增加幅度有所恢复, 但均在100%范围内。整个试验完成后摩擦力矩和试验前相比有所增加。
试验后将二维运动机构拆开, 将轴承组件进行精度复检, 将轴承内外圈分离进行固体润滑膜系磨损程度检验。轴承膜层未损坏。
目前该二维运动机构已成功发射, 在轨运行正常, 满足可靠性要求。
对于空间二维运动机构来说, 在轨工作条件决定了轴系预紧力和转动速度已经确定, 那么在进行热真空准加速寿命试验设计时, 通过合理选取真空度、试验温度范围和工作次数完成试验设计。最后通过试验证明了本文的试验方法可行有效。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|