
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
环形交叉口的所有进口道适时交通信号控制策略
[徐洪峰 , 章琨, 姚荣涵]
, 章琨, 姚荣涵]
, 章琨, 姚荣涵]
|
|


作者简介:徐洪峰(1978-),男,副教授,博士.研究方向:交通组织、管理与控制.E-mail:hfxu@dlut.edu.cn
以中大型环形交叉口为研究对象,针对传统的个别进口道适时交通信号控制策略适用范围窄、难以避免环道全局死锁的问题,提出了一种所有进口道适时交通信号控制策略。该策略要求全面监测进口道和环道的交通运行状态,面向所有进口道适时实施交通信号控制,预设了3种交通运行组织方式,采用模块化设计并以交通事件为驱动机制,能够及时预判并彻底消除环道全局死锁的可能性,动态调整交通运行组织方式以及交通信号灯色的显示时间,主动适应机动车交通负荷水平的连续变化。仿真实验结果显示,该控制策略在较低和中等机动车交通负荷水平下具有良好的性能,较高机动车交通负荷水平下相对较差的性能预示着继续提升环形交叉口的交通控制等级的必要性。
Traditional metering signalization is designed for individual entry at roundabout with unbalanced vehicular demands, which could fail to avoid circulatory roadway from locking up. A new control strategy of full metering signalization at roundabout is proposed which can be used for multilane roundabout. Traffic detectors are placed on each approach and the circulatory roadway to detect time headways and occupancy times. Metering signals are installed on each approach and are used on a part-time basis. Metering signal operations can be managed in three modes. Four function modules driven by traffic events are designed to avoid circulatory roadway from locking up. These modules satisfy different levels of vehicular demands by dynamically changing the mode of metering signal operation and the durations of different color signals. VISSIM simulation results show that good performance of proposed full metering signalization is obtained in low and medium load demand scenarios. The poor performance in heavy load demand scenarios indicates the necessity to implement full signalization on every approach and on the circulatory roadway.
近年来, 国内外针对环形交叉口的交通信号控制方法进行了专门研究。国外学者的研究多聚焦于进口道适时交通信号控制[1, 2, 3, 4, 5], 国内学者的研究多聚焦于进口道和环道全时交通信号控制[6, 7, 8, 9, 10]。传统的进口道适时交通信号控制策略要求在机动车交通负荷水平显著较高或较低的个别进口道临近环道的上游位置施划机动车停止线、安装红黄两色交通信号灯(灯色显示顺序为暗→ 黄→ 红→ 暗), 因此, 又称为个别进口道适时交通信号控制策略。此种策略存在以下不足之处:①仅适用于各进口道的机动车交通负荷水平呈现显著不均衡性的环形交叉口, 同时, 缺少对所谓“ 不均衡性” 的定量描述, 导致交通信号灯的设置条件不明确; ②无法全面监测进口道和环道的交通运行状态, 随着各进口道机动车交通负荷水平的整体提高, 难以避免环道全局死锁现象的发生。
针对上述问题, 本文以四路环形交叉口为例, 在全面监测进口道和环道的交通运行状态、所有进口道均安装红黄两色交通信号灯的技术框架下, 提出一种所有进口道适时交通信号控制策略, 期望为环形交叉口的交通管理与控制提供技术支持。
本文的研究环境描述为:①各进口方向的进口车道数不少于2条, 环内车道数不少于2条; ②在各进口道临近环道的10~20 m位置施划机动车停止线、安装红黄两色交通信号灯(灯色显示顺序为暗→ 黄→ 红→ 暗), 在交通信号灯的下方安装内容为“ 红灯亮时, 禁止直行和左转车辆通行” 的辅助标志; ③右转车辆自由接近环道, 始终遵循让行规则驶入和驶离环道; ④进出口道范围内未设置平面过街设施; ⑤后文的所有流程图中, “ =1” 表示交通事件已经发生或正在发生, “ ∶ =1” 表示令交通事件在下一秒发生。
较低机动车交通负荷水平下, 让行规则能够安全、高效地为入环车辆、环内车辆和出环车辆分配通行权。随着机动车交通负荷水平的提高, 环道车流趋于密集, 车辆进出环道的难度加大, 入环车辆不让环内车辆先行、环内车辆不让出环车辆先行的现象愈发频繁, 让行规则趋于全面失效。一旦发出环道全局死锁预警, 应禁止所有进口道的直行和左转车辆接近环道, 以便快速疏散环内车辆, 避免发生环道全局死锁。环道全局死锁预警解除后, 若任意进口道的机动车交通负荷处于较高水平, 认为环形交叉口仍将面临环道全局死锁的危险, 应使得各进口道的直行和左转车辆有规律地接近环道, 遵循让行规则驶入和驶离环道, 直至各进口道机动车交通负荷降至相对较低的水平, 方能允许直行和左转车辆自由接近环道, 遵循让行规则驶入和驶离环道。
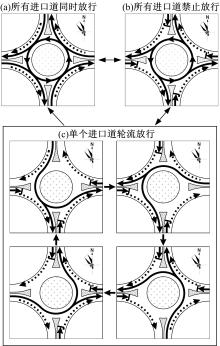
所有进口道适时交通信号控制条件下, 所有进口道均安装有交通信号灯, 可以实施3种交通运行组织方式。根据进口道和环道的交通运行状态, 不同的交通运行组织方式之间将进行动态调整, 每一种交通运行组织方式的活跃时间也将进行动态调整。
(1)所有进口道同时放行:所有交通信号灯同时显示暗灯, 直行和左转车辆自由接近环道, 遵循让行规则驶入和驶离环道, 如图1(a)所示。
(2)所有进口道禁止放行:所有交通信号灯同时显示红灯, 禁止直行和左转车辆接近环道, 已通过机动车停止线的车辆遵循让行规则驶入和驶离环道, 如图1(b)所示。
(3)单个进口道轮流放行:按照顺时针的顺序, 依次令单个进口道的交通信号灯显示暗灯、其余进口道的交通信号灯显示红灯, 显示暗灯的进口道的直行和左转车辆自由接近环道, 遵循让行规则驶入和驶离环道, 显示红灯的进口道的直行和左转车辆不得接近环道, 如图1(c)所示。
 | 图1 交通运行组织方式Fig.1 Traffic operation modes |
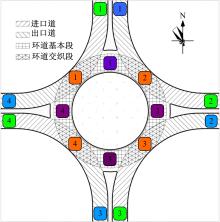
四路环形交叉口的交通功能区编号如图2所示。根据承载交通功能的不同, 将环形交叉口的车辆通行空间分为:①进口道; ②出口道; ③环道交织段; ④环道基本段。
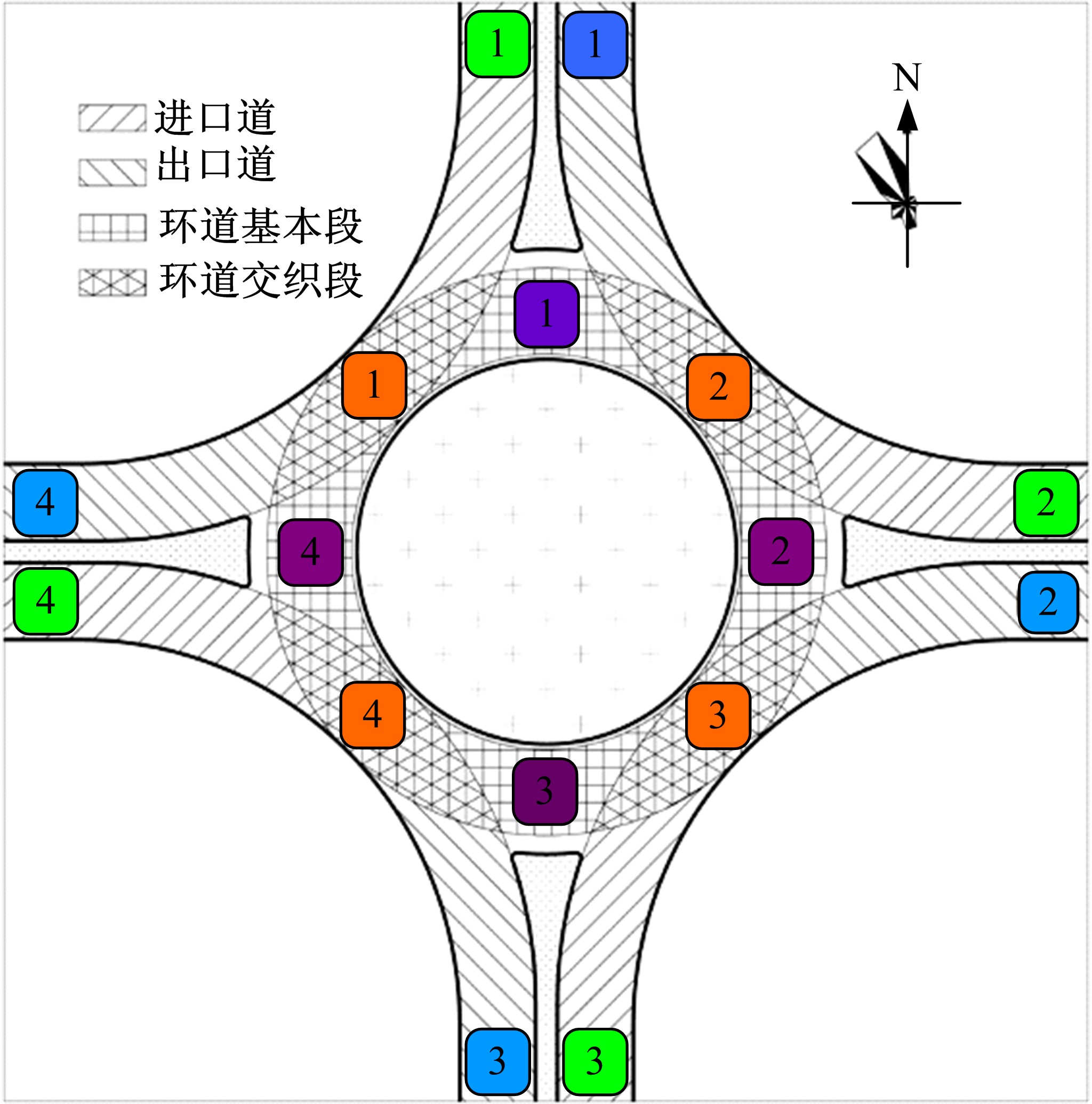 | 图2 交通功能分区Fig.2 Functional areas |
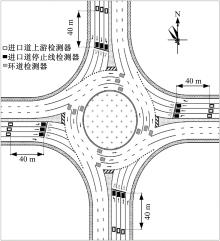
为了实时监测进口道和环道的交通运行状态, 要求布设进口道上游检测器、进口道停止线检测器和环道检测器, 如图3所示(以具有3条环内车道的四路环形交叉口为例)。不同类型的交通数据检测器具有不同的功能定位, 采用车道独立检测方法获取车头时距和(或)占有时间[11], 如表1所示。
 | 图3 交通数据检测器的布设位置示意Fig.3 Traffic detectors location illustrated |
| 表1 交通数据检测器的布设方式 Table 1 Traffic detectors placement |
所有进口道适时交通信号控制策略是一种交通事件驱动的交通响应控制策略, 其主要技术特征在于:①认为适时启用某个进口道的某种交通信号灯色的目的是为了响应某些能够表征道路使用者的通行时间资源供给或需求状态、可定量解析或准确感知的交通事件; ②以“ 预判并消除环道全局死锁的可能性、适应机动车交通负荷水平的连续变化” 为控制目标, 并将其分解为若干控制任务, 交通事件被有选择地纳入到控制任务之中, 作为动态调整环形交叉口的交通运行组织方式以及各进口道的交通信号灯色显示时间的主要依据。
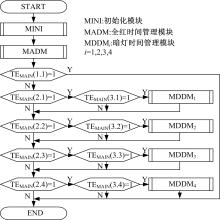
所有进口道适时交通信号控制策略具有模块化的技术架构, 由主模块、初始化模块、全红时间管理模块和暗灯时间管理模块构成。主模块是控制策略的基础平台, 初始化模块和全红时间管理模块是面向所有进口道的交通信号灯、承担具体控制任务的公用功能模块, 暗灯时间管理模块是面向特定进口道的交通信号灯、承担具体控制任务的专用功能模块。控制策略的执行周期为1 s, 这意味着, 交通信号灯色的更新周期为1 s。
主模块(Main module, MAIN)用以从顶层建立不同功能模块之间的数据流和控制流, 对于其他功能模块实现既定的控制功能起到支撑的作用。
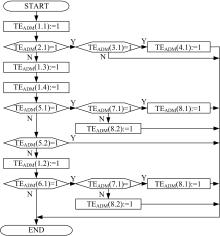
主模块的技术流程如图4所示, 其中涉及的交通事件TEMAIN(no.)如下所示。
 | 图4 主模块的技术流程Fig.4 Flow chart of MAIN |
TEMAIN(1.1):已启用所有进口道同时放行方式。
TEMAIN(2.1):进口道1的信号灯显示暗灯。
TEMAIN(2.2):进口道2的信号灯显示暗灯。
TEMAIN(2.3):进口道3的信号灯显示暗灯。
TEMAIN(2.4):进口道4的信号灯显示暗灯。
TEMAIN(3.1):进口道1的当前暗灯时间大于等于最小暗灯时间。
TEMAIN(3.2):进口道2的当前暗灯时间大于等于最小暗灯时间。
TEMAIN(3.3):进口道3的当前暗灯时间大于等于最小暗灯时间。
TEMAIN(3.4):进口道4的当前暗灯时间大于等于最小暗灯时间。
初始化模块(Module for initialization, MINI)用以对控制时段内具有固定取值的技术参数进行初始赋值操作。初始化模块仅在控制时段的起始时刻被执行1次。
在初始化模块中进行赋值的技术参数包括:①黄灯时间; ②最小全红时间; ③最大全红时间; ④最小暗灯时间; ⑤最大暗灯时间; ⑥进口道上游检测器的车头时距阈值; ⑦环道检测器的车头时距阈值; ⑧进口道上游检测器的占有时间阈值; ⑨进口道停止线检测器的占有时间阈值; ⑩环道检测器的占有时间阈值。
全红时间管理模块(Module for all-red duration management, MADM)用以监测环道检测断面和进口道停止线检测断面的交通运行状态, 适时决定启用或退出所有进口道禁止放行方式。
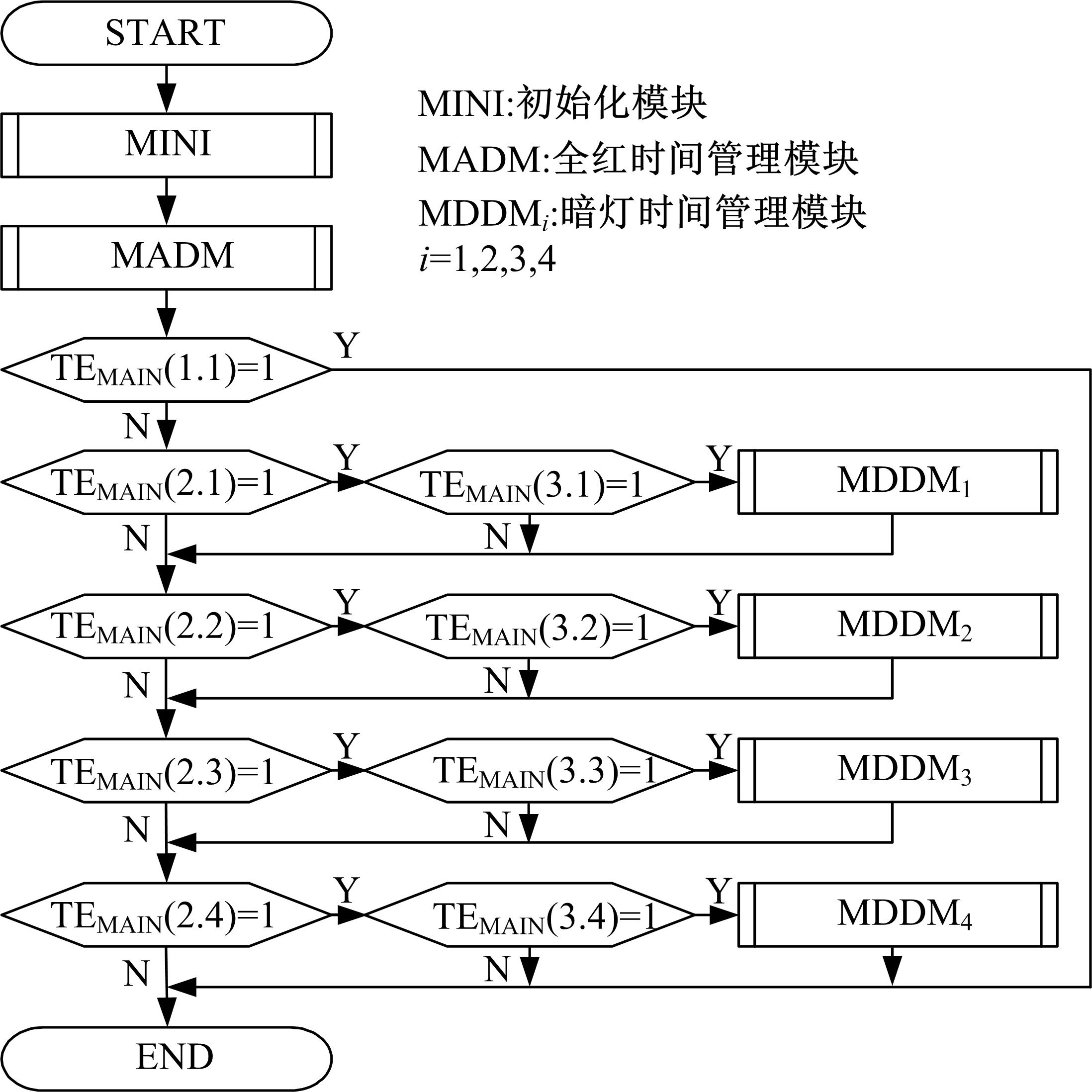
全红时间管理模块的技术流程如图5所示, 其中涉及的交通事件TEADM(no.)如下所示。
 | 图5 全红时间管理模块的技术流程Fig.5 Flow chart of MADM |
TEADM(1.1):记录所有环道检测器采集的占有时间。
TEADM(1.2):记录所有环道检测器采集的车头时距。
TEADM(1.3):记录当前全红时间。
TEADM(1.4):记录所有进口道停止线检测器采集的占有时间。
TEADM(2.1):未启用所有进口道禁止放行方式。
TEADM(3.1):任意3个环道基本段可能发生阻塞, 即任意3个环道基本段的环道检测器采集的最大占有时间均大于等于占有时间阈值。
TEADM(4.1):启用所有进口道禁止放行方式, 令所有进口道的交通信号灯由暗灯切换至红灯。
TEADM(5.1):当前全红时间大于等于最大全红时间。
TEADM(5.2):当前全红时间小于最小全红时间。
TEADM(6.1):无车辆连续到达任意1个环道基本段, 即所有环道检测器采集的车头时距均大于车头时距阈值。
TEADM(7.1):所有进口道机动车停止线后均已形成车辆排队, 即所有进口道的进口道停止线检测器采集的最大占有时间均大于等于占有时间阈值。
TEADM(8.1):退出所有进口道禁止放行方式, 启用单个进口道轮流放行方式, 令排队头车等待时间最长(即进口道停止线检测器占有时间最大)的进口道的交通信号灯由红灯切换至暗灯, 令其他进口道的交通信号灯继续显示红灯。若各进口道的排队头车等待时间相等, 令进口道1的交通信号灯由红灯切换至暗灯。
TEADM(8.2):退出所有进口道禁止放行方式, 启用所有进口道同时放行方式, 令所有进口道的交通信号灯由红灯切换至暗灯。
暗灯时间管理模块i(Module i for dark duration management, MDDMi)面向进口道i的交通信号灯, 用以监测进口道上游检测断面和进口道停止线检测断面的交通运行状态, 适时决定继续单个进口道轮流放行方式或启用所有进口道同时放行方式, i=1, 2, 3, 4。
暗灯时间管理模块i的技术流程如图6所示, 其中涉及的交通事件TEDDM-i(no.)如下所示。
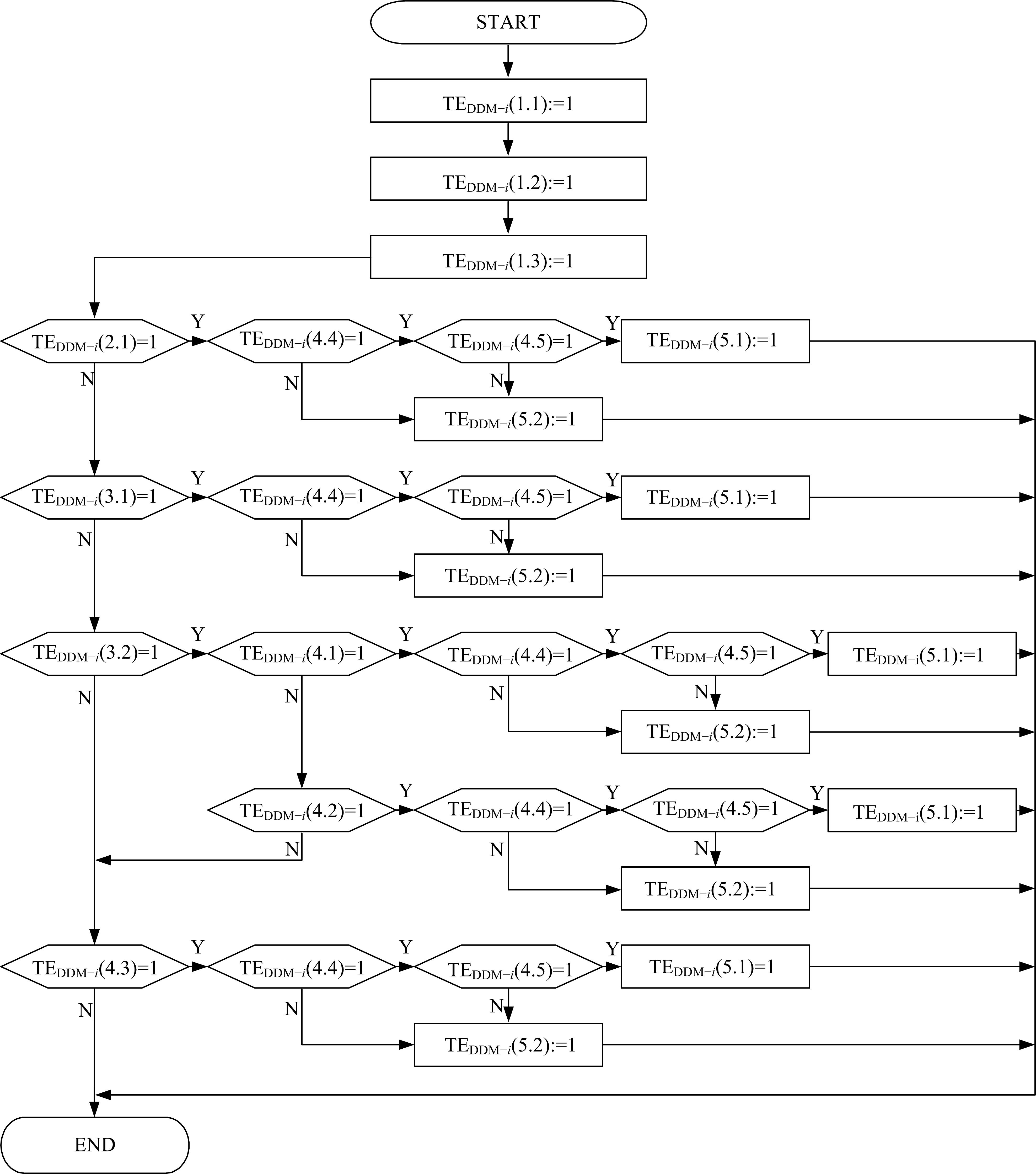 | 图6 暗灯时间管理模块i的技术流程Fig.6 Flow chart of MDDMi |
TEDDM-i(1.1):记录进口道i的所有进口道上游检测器采集的车头时距。
TEDDM-i(1.2):记录其他3个进口道的所有进口道上游检测器采集的占有时间。
TEDDM-i(1.3):记录其他3个进口道的所有进口道停止线检测器采集的占有时间。
TEDDM-i(2.1):进口道i的当前暗灯时间大于等于最大暗灯时间。
TEDDM-i(3.1):进口道i的所有进口车道的车辆通行需求已经得到满足, 即进口道i的所有进口道上游检测器采集的车头时距先后或同时大于车头时距阈值。
TEDDM-i(3.2):进口道i的大部分进口车道的车辆通行需求已经得到满足, 即进口道i超过半数的进口道上游检测器采集的车头时距先后或同时大于车头时距阈值。
TEDDM-i(4.1):进口道i顺时针方向相邻的第1个进口道存在较长的车辆排队, 即进口道i顺时针方向相邻的第1个进口道的进口道上游检测器采集的最大占有时间大于等于占有时间阈值。
TEDDM-i(4.2):进口道i顺时针方向相邻的第2个进口道存在较长的车辆排队, 即进口道i顺时针方向相邻的第2个进口道的进口道上游检测器采集的最大占有时间大于等于占有时间阈值。
TEDDM-i(4.3):进口道i顺时针方向相邻的第3个进口道存在较长的车辆排队, 即进口道i顺时针方向相邻的第3个进口道的进口道上游检测器采集的最大占有时间大于等于占有时间阈值。
TEDDM-i(4.4):其他3个进口道均不存在较长的车辆排队, 即其他3个进口道的进口道上游检测器采集的占有时间均小于占有时间阈值。
TEDDM-i(4.5):其他1个或多个进口道的机动车停止线后尚未形成车辆排队, 即其他1个或多个进口道的进口道停止线检测器采集的占有时间均小于占有时间阈值。
TEDDM-i(5.1):退出单个进口道轮流放行方式, 进入所有进口道同时放行方式, 令进口道i的交通信号灯继续显示暗灯, 令其他3个进口道的交通信号灯由红灯切换至暗灯。
TEDDM-i(5.2):继续单个进口道轮流放行方式, 令进口道i的交通信号灯由暗灯切换至红灯, 令进口道i顺时针方向相邻的第1个进口道的交通信号灯由红灯切换至暗灯。
选取典型的四路环形交叉口为研究对象, 利用VISSIM 5.4建立仿真实验环境, 针对全时让行规则控制策略和所有进口道适时交通信号控制策略的性能表现进行仿真实验分析。
对象交叉口的道路空间条件如图3所示。各条道路的路段车道数为3条、进口车道数为4条(1条右转专用车道、2条直行专用车道、1条左转专用车道)。环内车道数为3条。
进口道采用右侧展宽, 最外侧进口道的展宽段长度为50 m, 展宽渐变段的长度为20 m。中心岛的直径为35 m, 单条进口车道、出口车道、环内车道的宽度分别为3 m、3.5 m、4 m。
路段和进出口道的限制车速为50 km/h。
较低、中等和较高机动车交通负荷水平下, 分别在一定的抽样范围内随机选取各进口道、各交通流向的机动车到达交通量, 共构成9种交通需求组合, 如表2所示。
| 表2 各交通需求组合的机动车到达交通量 Table 2 Traffic volume of vehicular demands (pcu· h-1) |
信号控制条件如下:①黄灯时间取为3 s; ②最小全红时间取为30 s; ③最大全红时间取为90 s; ④最小暗灯时间取为20 s; ⑤最大暗灯时间取为60 s; ⑥进口道上游检测器的车头时距阈值取为2.5 s; ⑦环道检测器的车头时距阈值取为2.5 s; ⑧进口道上游检测器的占有时间阈值取为5 s; ⑨进口道停止线检测器的占有时间阈值取为8 s; ⑩环道检测器的占有时间阈值取为4 s。
为了消除标准车辆折算给仿真建模带来的不便, 将机动车的交通构成定义为标准车辆(即车辆长度小于6 m的小型车)。机动车的最小和最大期望速度分别为48 km/h和58 km/h。
车辆跟驰模型中, 车辆最小前视和后视距离均为30 m, 车辆最大前视和后视距离均为100 m, 平均停车间距为1.5 m, 期望安全距离的附加部分为2.5, 期望安全距离的倍数部分为3.5。车道变换模型中, 车辆消失前的等待时间为45 s。其他驾驶行为参数采用默认值。
仿真运行总时间为11 700 s, 其中, 数据采集时段为901~11 700 s, 数据分析总时间为10 800 s。针对每一种交通需求组合进行一组仿真实验, 每一组仿真实验进行5次仿真运行, 每一次仿真运行选取的随机数分别为9、19、29、39、49。
对于全时让行规则控制策略和所有进口道适时交通信号控制策略, 用以描述交通运行效率的分析指标如下所示。
(1)交叉口车均延误(ADV):任意一组交通需求组合下, 5次仿真运行得到的5个交叉口车均延误的算术平均值见表3。
(2)交叉口85%位单车延误(DV85):任意一组交通需求组合下, 5次仿真运行得到的所有单车延误的85%分位数见表3。
| 表3 交通运行效率的分析指标 Table 3 Measures of traffic operation effectiveness |
对于所有进口道适时交通信号控制策略, 用以描述交通运行组织的分析指标如下所示。
(1)单个进口道轮流放行方式的活跃度(Psae):任意一组交通需求组合下, 每一次仿真运行得到的单个进口道轮流放行方式的持续时间在数据分析总时间中所占的比例见表4。
(2)所有进口道禁止放行方式的活跃度(Par):任意一组交通需求组合下, 每一次仿真运行得到的所有进口道禁止放行方式的持续时间在数据分析总时间中所占的比例见表4。
(3)所有进口道禁止放行方式的启用次数(Nar):任意一组交通需求组合下, 每一次仿真运行得到的所有进口道禁止放行方式的启用次数, 见表4。
| 表4 交通运行组织的分析指标 Table 4 Measures of traffic operation modes |
中等和较高机动车交通负荷水平下, 全时让行规则控制的对象交叉口无一例外发生了环道全局死锁, 所有进口道适时交通信号控制的对象交叉口均未发生环道全局死锁, 说明所有进口道适时交通信号控制策略能预判并消除环道全局死锁的可能性。
机动车交通负荷处于较低水平时, 所有进口道适时交通信号控制的对象交叉口始终启用所有进口道同时放行方式, 交叉口车均延误和交叉口85%位单车延误与全时让行规则控制的对象交叉口完全相同, 说明所有进口道适时交通信号控制策略对于对象交叉口的性能无负面影响。
机动车交通负荷处于中等水平时, 所有进口道适时交通信号控制的对象交叉口交替启用所有进口道同时放行方式、所有进口道禁止放行方式、单个进口道轮流放行方式; 与较低机动车交通负荷水平时相比, 尽管交叉口车均延误和交叉口85%位单车延误显著增加, 但仍处于低位运行的态势, 说明所有进口道适时交通信号控制策略能够充分发挥不同交通运行组织方式的技术优势, 有效遏制对象交叉口的交通运行效率发生显著恶化。
机动车交通负荷处于较高水平时, 所有进口道适时交通信号控制的对象交叉口在绝大部分时间内启用单个进口道轮流放行方式, 极个别情况下, 也将启用所有进口道禁止放行方式和所有进口道同时放行方式。与中等机动车交通负荷水平时相比, 交叉口车均延误和交叉口85%位单车延误处于高位运行的态势, 说明所有进口道适时交通信号控制策略仍将面临环道全局死锁的危险, 同时, 无助于进一步改善对象交叉口的交通运行效率。
本文提出的所有进口道适时交通信号控制策略要求全面监测进口道和环道的交通运行状态, 面向所有进口道适时实施交通信号控制。它充分融合了让行规则控制和交通信号控制的技术优势, 能够及时预判并彻底消除环道全局死锁的可能性, 主动适应机动车交通负荷水平的连续变化, 具有普遍的适用性和良好的性能表现。然而, 随着各进口道的机动车交通负荷整体提升至较高水平, 即使实施了单个进口道轮流放行方式主导的交通控制方法, 环形交叉口仍将出现让行规则趋于全面失效的局面, 同时, 交通运行效率也难以得到进一步的改善, 这预示着, 有必要继续提升环形交叉口的交通控制等级。下一阶段, 本团队将致力于实现全时让行规则控制、所有进口道适时交通信号控制、进口道和环道全时交通信号控制的垂直整合, 建立环形交叉口的多级交通控制策略。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|