




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
信号交叉口实时排队长度估计
[赵淑芝1  , 梁士栋
, 梁士栋1 , 马明辉1 , 刘华胜1 , 朱永刚2 ]
, 梁士栋, 马明辉|
|


作者简介:赵淑芝(1958-),女,教授,博士生导师.研究方向:交通运输系统规划.E-mail:zhaosz@jlu.edu.cn
通过改进的METANET模型来模拟车辆排队形成和释放过程,并以该模型为基础,通过分析排队队尾车辆的空间分布计算得出排队队尾位置,从而获得实时信号交叉口车辆排队长度。最后,对提出的城市信号交叉口排队长度实时估计方法进行验证。结果表明,用本文提出的车辆排队长度估计方法能够实时精确地得到交叉口信号周期内车辆动态排队长度,进而为城市道路交通控制与管理提供必要的决策支持。
In order to estimate the real-time queue length at signalized intersection, a macroscopic traffic flow model METANET was improved to describe vehicle accumulation and discharge process in urban road. First, the queue tail cell is identified according to analysis of the density calculated with the improved traffic flow model. Then, the vehicle spatial distribution in the queue tail cell is analyzed to identify the location of the queue tail, so that the queue length can be calculated. Finally, the proposed model is evaluated and the results demonstrate that this model can be used to estimate queue length in real-time with satisfactory accuracy. The proposed estimation method may be used to support the strategy generation of traffic control and management.
城市信号交叉口排队长度作为评价城市交通系统运行效率的重要指标, 为城市交通管理与控制提供必要的决策支持[1]。国内外城市交通相关研究学者针对车辆排队长度的确定问题提出了大量计算方法。现有排队长度估计模型构建主要基于交通波理论、累积曲线理论及排队论方法。累积曲线理论首先由Webster[2]提出, 通过构建车辆到达与离去曲线, 利用图论的相关方法得到曲线之间的部分, 从而得到排队长度; 交通波理论由Lighthill和Whitham[3]提出, 用以描述连续交通流, 之后由Stephanopoulos等[4]和Michalopoulos等[5]将该理论应用于信号交叉口, 基本原理是通过追踪交通波波阵面的位置得到排队长度; 排队论方法是将道路瓶颈看成一个服务系统, 车辆到达规律服从一定分布, 当车辆到达率超过服务能力时, 排队开始形成, 车辆到达累计数与离去累计数之差为排队车辆数[6]。目前, 已有的排队长度估计方法主要旨在交通流状态保持不变或连续变化的交通状态条件下, 获得交通交叉口信号周期内最大排队长度[7]和平均排队长度[8]。然而, 城市道路交通系统是一个复杂的、随机性极强的系统, 即使在较短时间内, 交通参数也有可能会发生较大的变化, 现有的排队长度估计模型无法对交通流短时变化条件下信号交叉口排队长度进行实时有效地计算。
本文针对城市道路交通流的时变性, 从信号交叉口交通流运行时空特性出发, 对二阶宏观交通流模型METANET进行改进, 使其能够准确有效地对信号交叉口车辆排队形成和消散过程进行描述, 并以此模型为基础, 通过线圈数据实时获取道路上每一个单元内的交通密度, 实时判断排队队尾所在空间单元内的具体位置, 进而构建排队长度估计模型, 以实现对信号交叉口车辆排队长度进行实时有效的估计。
宏观交通流模型METANET是对交通流动态速度连续守恒方程在时间和空间上实施离散化处理, 实现对交通流在时空域中状态变化的准确描述[9]。
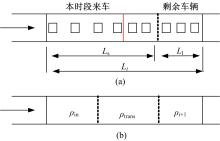
将城市道路两个相邻交叉口所截路段m以长度Li为单位划分为i个单元, 如图1所示。以单元i为基础对各单元交通流参数变化情况进行描述。根据交通流流量守恒定律, t到t+Δ t采样间隔内, 单元i+1中车辆数等于t时刻单元i车辆加上流入单元i的车辆, 再减去流出单元i的车辆数。每个单元i中流入的交通量qi(t)等于道路车辆密度ρ i-1(t)、车辆平均速度vi-1(t)与车道数λ 乘积:
 | 图1 道路离散化示意图Fig.1 Road discretization diagram |
对道路交通参数基本关系描述整理可得:
t到t+Δ t采样间隔单元i内动态速度值描述为:t-Δ t到t采样间隔内车辆运行平均速度值同驾驶员期望速度V[ρ i(t)]离差、qi(t)引起的速度增加(减少)量及交通流密度对驾驶员经验速度的影响变化量之和, 如式(3)所示:
式中:τ 、υ 、κ 均为模型参数, 其中期望速度V[ρ i(t)]表示为:
式中:α m为模型参数; vf为自由流速度; ρ c为临界密度。
当交通流处于拥挤状态时, 考虑到下游单元所能容纳的车辆数和道路的通行能力的限制, 单元间的流率应取为上游单元的需求、下游单元的供给与道路通行能力Qmax的最小值:
式(1)~式(5)共同组成宏观交通流基本参数迭代公式, 以此为基础可递推得到路段上任意时刻任一单元内交通基本参数。
为了确保路段各个单元格内交通流参数计算的准确性, 除需明确道路内部各单元间传递关系外, 还需对道路整体交通流的输入和输出情况进行描述。
道路交通流输入情况可通过在实验路段起始处设置检测器获得。路段输出交通量主要可通过两种方式获得:①通过布设线圈直接得到输出交通参数[10]; ②通过信号交叉口的交通信号配时参数对停车线单元格的输出交通参数进行估计。通过信号配时方案对路段输出交通流参数进行估计, 当交通信号为红灯时, 停车线处无车辆通行, 此时单元i+1内交通流密度为零; 当信号灯初变绿灯时, 单元i+1内交通流密度需根据停车线上游单元i内交通流密度及临界密度ρ c两个基本量确定; 当交通信号处于绿灯初期时, 道路交通流以饱和流率通过停车线, 此时单元i+1内交通流密度为路段临界密度ρ c; 当信号处于绿灯后期时, 此时如单元i内交通流密度大于临界密度ρ c, 车流将继续以饱和流率状态通过停车线, 反之, 如小于临界密度ρ c时, 单元i+1的密度与上一采样间隔内单元i的密度相同。综上, 可以通过信号周期设置情况对边界条件进行确定:
ρ i+1(t)=
由于宏观交通流模型METANET最早用于描述高速公路中的连续流, 因此是否能直接将该模型用于描述城市道路信号交叉口前的车辆排队聚散过程, 需要先进行验证。本文利用数值仿真的方法对该模型进行检验。对单车道进行排队长度估计, 时间步长为4 s, 每个单元长度为60 m, 检测器与停车线的距离为480 m(分为8个单元), 首先对一个周期内的到达释放过程进行模拟, 车辆为随机到达, 路段临界密度ρ c=0.033 veh/(m· lane), 阻塞密度ρ J=0.144 veh/m。图2为由传统METANET模型计算得到的一个信号周期内各道路各单元格内交通流密度变化示意图, 纵坐标为时间坐标, 横坐标为空间坐标(刻度为单元的编号), 最右侧为停车线, 图例中颜色的深浅代表道路上交通流密度。
 | 图2 一个周期排队过程单元格内密度演化Fig.2 Density evolution in a signal cycle |
图2可以直观地表现出单元4到单元8中各单元内交通流密度由阻塞密度转化为临界密度过程中所花费的时间不同, 而传统METANET模型假设每个单元具有相同的性质, 除初始和末尾单元外, 剩余单元内交通流密度演变过程应具有一致性, 故假设与检验结果相违背。另一方面, 该离散化交通流模型将每一单元内车辆分布假设为均匀分布, 只要下游单元格内的密度小于阻塞密度就认为能够提供交通供给空间, 故模型描述释放过程中, 单元8尚未达到临界密度时单元7内车辆已经开始移动, 然而实际上单元内车辆分布是不均匀的, 排队释放过程中即使单元内密度低于阻塞密度, 只要单元内最后一辆车没有启动, 上游单元内车辆就不能移动, 即实际交叉口路段车辆排队释放过程中, 路段交通流释放过程应为停车线上游相邻单元8首先以饱和流率释放, 当该单元内交通流密度达到临界密度时, 单元7内车辆开始释放, 依次类推直到交通波传输到排队队尾单元格, 故传统的METANET模型不能直接用于描述城市道路交通变化过程。
针对上述问题, 对METANET模型进行改进, 使其能准确描述城市道路交叉口车辆释放过程。改进思路如下:当下游单元密度均为接近于临界密度, 而该单元格密度等于或接近临界密度时, 与之相邻的上游单元格内车辆开始释放; 反之若该单元格密度尚未达到临界, 则此时相邻上游单元无车辆释放, 具体表示为:
道路车辆排队形成阶段, 车辆在停车线前不断累积, 此时停车线相邻单元内交通流密度逐渐增加并接近于道路交通阻塞密度, 远离停车线的上游单元车辆呈自由到达状态; 车辆排队释放阶段, 停车线上游单元内车辆以饱和流率依次驶入交叉口, 按照交通流运行方向的反方向, 各单元内交通流密度依次变为临界密度。综上, 队尾单元下游的交通流密度介于临界密度与阻塞密度之间, 其上游单元内交通流密度小于临界密度。
在初步判断排队队尾在单元i或单元i-1中的基础上, 为了能够进一步确定队尾位置, 需对单元i和单元i-1中交通流变化情况进行具体分析。如采样间隔t-Δ t到t内, i-1单元内车辆全部流入单元i内, 说明排队尚未上溯到单元i-1内, 故排队队尾在单元i内; 反之, i-1单元内车辆全部流入单元i内, 说明单元i内已无法提供充足的空间吸收上游车辆, 故此时排队队尾确定在单元i-1中, 排队队尾位置判别条件表示为:
通过对排队队尾位置的初步判别可知排队队尾所处单元, 由于单元长度较长无法得到队尾车辆精确位置, 因此, 需进一步构建精确的排队长度计算模型。根据上文可确认排队队尾所处单元, 对该单元内密度参数进行分析。
图3中, Ls表示单元i为上游来车供给空间长度; Ll为已存车辆占据的空间长度; ρ in为上游单元车辆进入单元i的车辆密度; ρ trans为过渡密度; ρ i+1为下游单元i+1内交通流密度。结合图3(a)和(b)分析, 单元中排队车辆由上一时段剩余车辆和该时段内到达的车辆共同构成, 而排队队尾与上游到达车辆的密度以临界密度ρ c为分隔密度, 即当某一位置密度由小于临界密度转变为临界密度时则认为该位置车辆为排队车辆, 故确定排队队尾具体位置只需确定单元内车辆密度分界位置即可。首先对剩余车辆所占据的空间长度Ll进行确定:
 | 图3 排队队尾单元分析图Fig.3 Analysis of queue tail cell |
由于采样间隔时间Δ t较短, 故假设该时间段内车辆呈均匀到达状态, 进而可知图3(b)中ρ in可表示为:
采样间隔内新到达的车辆数由单元内密度转变为ρ trans的车辆和处于自由行驶状态尚未加入车辆排队的车辆组成, 单元供给空间长度和新到车辆数计算如式(12)(13)所示:
式中:nx为密度变为ρ in的车辆数; ny为密度变为ρ trans的车辆数。
联立式(12)(13)可解得车辆数nx:
为了进一步确定过渡ρ trans转变为临界ρ c排队队尾车辆所处的空间位置, 需对队尾单元空间密度分布情况进行分析, 如图4所示。
 | 图4 队尾单元密度空间分布图Fig.4 Spatial distribution of density in queue tail cell |
图4中, B点为排队单元内排队队尾所处空间位置, A、B和C点位于同一直线上, 故:
整理式(15)得到单元内排队队尾位置Lend:
队尾位置计算公式存在分母可能为零值情况, 需对分母为零时排队长度的计算方法进一步讨论:
(1)当ρ i+1(t)=0时, 交叉口信号处于红灯启亮初期, 交叉口排队刚刚开始, 排队队尾临近停车线单元, 停车线下游虚拟单元格密度为0, 此时ρ i+1(t)不能作为末尾单元格密度, 可由阻塞密度ρ j替换, 排队队尾位置Lend可表示为:
(2)当ρ in=0时, 此种情况的物理意义是本时段排队队尾单元i内无车辆驶入, 故判断排队队尾应位于上一时段该单元剩余车辆队尾位置, 即:
(3)当
综上对排队单元内排队队尾位置Lend进行了确定, 以此为基础对交叉口排队长度Lq进行计算, 排队长度为队尾单元内排队长度与下游所有单元长度之和, 如式(19)所示:
第k个信号周期内交叉口平均排队长度为该周期内所有的采样时刻排队长度的算术平均值, 即:
第k个周期内最大排队长度为该周期内所有的采样时刻排队长度的最大值, 即:
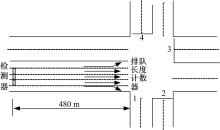
根据本文所提出的城市路段车辆排队长度计算方法对交叉口排队长度计算流程进行描述, 首先利用交通流模型得到道路上车辆空间分布, 进而根据道路上各单元内交通流密度获得车辆排队队尾所在单元, 最后根据队尾单元格内密度分布情况计算得出排队队尾确切位置。为了提高仿真数据与实际交通流运行数据的契合度, 选用长春市某交叉口作为仿真拟合区域, 并通过在该区域采集的交通流数据对VISSIM仿真软件相关参数进行标定。利用VISSIM仿真软件对本文提出的排队长度估计模型进行仿真验证, 交叉口示意如图5所示。
 | 图5 仿真交叉口示意图Fig.5 Intersection for simulation platform |
仿真软件基本参数设置如下:在瓶颈区域起始路段起点处布设检测器, 天气状况良好, 仿真路段总长度为480 m, 以60 m为基本单位将仿真路段划分为8个单元, 采样间隔为4 s, 自由流速度为15 m/s, 对进口道1的三条直行车道上的排队长度进行估计, 采用仿真软件中Wiedeman 74跟驰模型, 并将车辆驾驶行为设置为通过检测器后不再发生换道行为, 为了对各种状态下排队长度进行有效估计, 输入流量由小逐渐变大设置, 东西直交叉口、东西左交叉口、南北直交叉口、南北左交叉口的绿灯时长分别为68、40、48、36 s。
通过VISSIM仿真软件对交叉口进口道1的交通运行态势进行仿真, 获得道路交通运行基本参数数据, 并通过本文提出的排队长度计算方法对周期内道路的最大排队长度和平均排队长度进行计算, 并与通过传统METANET计算得出的排队长度以及仿真输出的实际道路车辆排队长度进行对比分析。
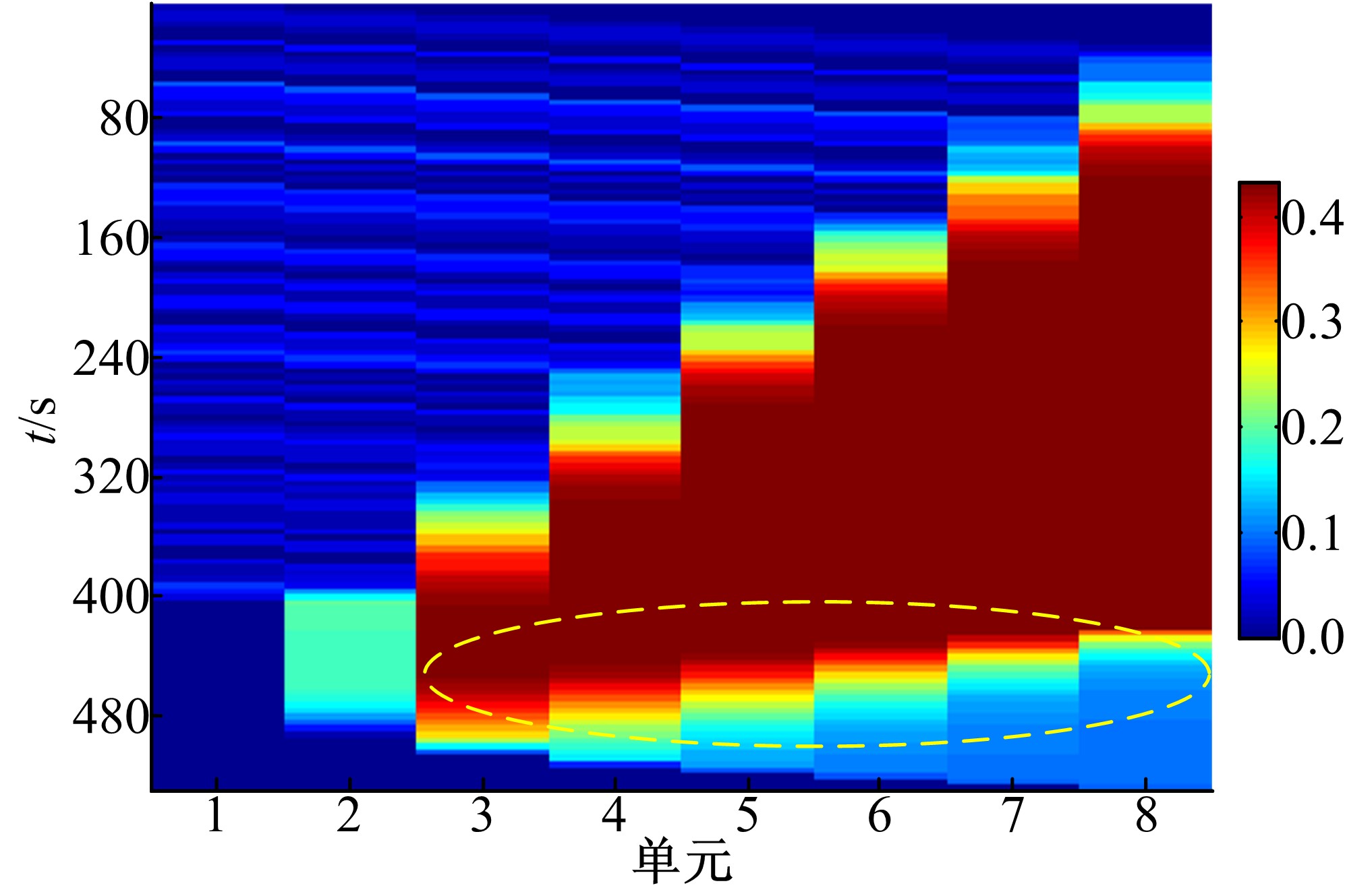
为了详细说明改进后交通流密度模型的有效性和本文提出城市道路排队长度实时计算模型的具体实施过程, 以改进后交通流模型计算得出的一个周期内路段上各个单元内交通流密度演化过程为例, 以密度图形式进行展现, 如图6所示。为了能够直观表现出改进前后的差别, 参数设置与图2一致。
 | 图6 基于改进模型的密度演化过程Fig.6 Density evolution based on modified METANET |
结合图2和图6对比改进前、后交通流模型对单元密度变化过程的描述。图2中, 在排队释放过程中, 随时间变化, 每一个单元内密度变化过程存在一定的差异性, 即越靠近停车线位置的元胞密度变化越快, 而越远离停车线的单元内元胞密度变化越慢, 与其模型假设各单元内同质性相矛盾, 同时, 与实际排队释放过程也存在一定差异, 由改进后模型计算获得的各单元内交通流密度变化呈现出相同的演变规律, 故原有模型中存在的密度变化不均匀现象(如图2所示)通过模型改进得到了有效解决, 且改进后模型能够准确体现实际排队释放过程中道路各单元内交通流密度的演变过程。
由图7可以看出, 仿真初期由于道路运行车辆数较少, 仿真路段基本无车辆排队产生, 但随着道路交通流量的增加, 车辆排队产生, 图7中3条曲线所呈现的车辆排队变化趋势基本一致。通过本文提出的排队长度计算模型计算得出的车辆最大排队长度曲线同仿真得出的实际最大排队长度曲线基本重合, 而通过未改进模型获得的计算值比真实值小。
 | 图7 最大排队长度计算结果对比Fig.7 Comparison of maximum queue length estimation |
改进后模型计算得出的最大排队相对误差值基本在5%左右波动, 平均相对误差为4.17%, 平均绝对误差为10 m; 而未改进模型计算结果相对误差大约在20%上下波动, 平均相对误差为17.2%, 平均绝对误差为41 m, 说明与传统模型相比, 改进后模型能够准确地计算得到车辆的最大排队长度。由此可以看出, 改进模型能较为准确地对道路交通流的最大排队长度进行计算, 且计算结果的相对误差处在容忍度(0~5%)以内。
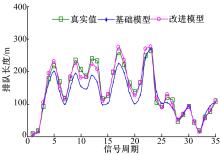
由图8可知, 传统METANET模型计算出的车辆平均排队长度低于真实值, 这是由于应用该原始模型时, 队尾单元内的车辆会比实际中提前移动, 导致本应加入排队的车辆没有减速停车而是直接以较大速度向前行驶, 因此排队车辆较实际排队车辆较少, 该结果与第一节中的分析相吻合。而改进模型平均排队长度计算值同真实值具有较高的吻合度。改进模型平均排队长度相对误差值波动较小, 误差范围在16%以内, 平均误差为7.04%, 平均绝对值为8 m; 而传统模型平均排队长度相对误差值波动较大, 平均误差为15.53%, 绝对误差平均值为18 m。由此可知, 相对于传统模型构建的排队长度计算模型, 改进模型能够更加精确地计算出车辆排队长度值, 且与排队长度实际采样值具有较好的契合度。
 | 图8 平均排队长度计算结果Fig.8 Comparison of average queue length estimation |
针对城市道路交叉口上游车辆排队长度难以精确测量等问题, 提出对宏观交通流模型METANET进行改进, 以再现交叉口处车辆排队形成、消散过程, 并以此为基础, 从交叉口排队动态变化时空特性角度出发, 对车辆排队形成过程进行深入分析, 从而构建实时排队长度计算模型, 并通过仿真手段验证了该模型的有效性和排队长度计算精确性, 进而为城市交叉口管理与控制提供了实时可靠的决策依据。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|