{kind=link}
{kind=link}
基于可靠度的动态随机交通网络耗时最优路径
[潘义勇1  , 马健霄
, 马健霄1 , 孙璐2 ]
, 马健霄, 孙璐|
|


作者简介:潘义勇(1980-),男,讲师,博士.研究方向:交通管理与控制.E-mail:uoupanyg@163.com
为了反映交通网络中考虑可靠性的路径选择行为,基于可靠性理论建立了动态随机网络环境下自适应最可靠路径模型.首先,定义行程时间可靠度为路径的目标函数,建立动态随机网络自适应最可靠路径模型反映交通网络的耗时随机特性,时变特性和风险性;其次,通过最优化理论把该问题转化为动态规划问题;然后,构造动态规划算法求解该问题;最后,通过Matlab计算机语言实现了算法程序,并针对实际交通网络展开数值试验.计算结果显示了该算法的收敛性和可行性.
In order to reflect the routing selection behavior considering reliability in essence, a mathematic model of optimal-reliable routing in stochastic and dynamic traffic network is developed based on reliability theory. First, through defining reliability as the objective function of routing, the adaptive reliable shortest path problem in stochastic and dynamic network is established to reflect the stochastic, time-varying and risk characteristics of travel time. Then, using optimization theory, the adaptive reliable shortest path problem is transformed the dynamic programming problem. Finally, an algorithm based on dynamic programming is developed to solve the proposed problem. Numerical results in typical transportation network demonstrate the validity and feasibility of the proposed algorithm.
耗时最优路径问题是智能交通系统(Intelligent transportation system, ITS)核心子系统之一的路径诱导系统(Route guidance system, RGS)的核心问题, 是交通工程研究热点领域[1, 2, 3].动态随机网络指网络边的权值不仅是随机变量, 而且该随机变量的概率分布函数是随时间变化的, 可以用来同时描述实际交通网络行程时间的时变特性和随机特性[4].随机路径分为先验路径和自适应路径, 但是自适应路径比先验路径更优[4].另一方面, 随着实时导航系统的发展和广泛应用, 在线的自适应路径问题越来越受到重视, 具有深刻的应用背景和重要的理论意义.
在动态随机网络环境下, 路径的最优性条件根据不同的需求有不同的定义, 主要分为期望值最小和可靠性最大.国内外学者主要研究最小期望路径问题, Miller-Hooks[5, 6]假设动态随机网络中网络边的时间维和空间维都是独立的随机变量, 并构造了标号修正算法求解最小期望路径策略问题, 但是这种独立性的假设不满足实际交通网络的需要.Bander和White[7]设计了启发式搜索方法AO* 求解自适应最小期望路径问题, 但是该算法不能保证收敛性.Gao[8, 9, 10]讨论了自适应最小期望路径问题的几种近似问题, 并基于在线实时信息获取的不同情形对问题进行了分类, 提出了基于文献[5, 6]DOT算法的DOT-SPI算法求解自适应最小期望路径问题.但是, 最小期望路径不能反映该路径的可靠性, 而对于风险规避的行驶者不仅关注行程时间的节省, 而且还关注行程时间的可靠性[11, 12, 13, 14, 15].把可靠度[16]定义为路径目标函数以反映交通网络中考虑可靠性的路径选择行为, 文献[17]研究了静态随机网络环境下最可靠路径问题, 本文是文献[17]的后续研究, 把上述问题扩展到动态网络环境下, 研究动态随机交通网络环境下最可靠路径问题.
动态随机网络
自适应路径并不是严格上的一条路, 是一个自适应路径策略的集合, 决策者根据当前的行车状态xi=(i, t, b) 选择下一个节点, 其中i为当前节点, t为当前时刻, b∈ B为当前的行程时间预算.定义集合N, T和B的笛卡尔积的集合Ω =N× T× B, 自适应路径策略是一个函数μ :Ω → N, μ (i, t, b)表示根据当前的行车状态选择的下一个节点.行驶者根据自适应路径策略μ :Ω → N选择的下一个节点是j, 下一个节点的当前状态
设
下面把动态随机网络自适应最可靠路径问题(1)(2)转化为动态规划问题求解, 证明其满足动态规划的Bellman's准则[18].首先定义自适应最可靠路径策略和自适应最可靠路径.
定义1((t, b)-自适应最可靠路径策略) 给定出发时间t和行程时间预算b, 路径策略μ * 是(t, b)-自适应最可靠路径策略当且仅当
定义2((t, b)-自适应最可靠路径) 依据(t, b)-自适应最可靠路径策略μ * 所构成的自适应路径{xu, xj, , et al., xd}称为(t, b)-自适应最可靠路径.
下面证明自适应最可靠路径满足动态规划的Bellman's准则[18].
定理1 (t, b)-自适应最可靠路径的任意子路径都是(t, b)-自适应最可靠路径.
证明 假设{xi, xj, , et al., xd}是(t, b)-自适应最可靠路径, 并且它的子路径{xj, , et al., xd}不是(t, b)-自适应最可靠路径.因此, 存在路径策略μ '使得对某一个x∈ [0, b),
因此
因为对某些
这与假设{xi, xj, , et al., xd}是(t, b)-自适应最可靠路径矛盾.
根据定理1, 动态随机网络环境下自适应最可靠路径问题满足动态规划Bellman's准则[18], 因此, 给定出发时间t和时间预算b, 动态随机网络环境下自适应最可靠路径问题可以转化为下列动态规划问题:
下面构造基于动态规划的算法求解上述动态规划问题(7)和(8).给定出发时间t和行程时间预算b, 寻找(t, b)-自适应最可靠路径策略
算法如下:
Step 0 初始化
0.1输入出发时间t, 行程时间预算b.
0.2初始化
k=0
For ∀ i∈ N, i≠ d, ∀ x∈ [0, b)
μ * (i, t+x, b-x)=φ
End for
μ * (d, t+x, b-x)=d, ∀ x∈ [0, b)
Step 1 迭代
k=k+1
μ * (d, t+x, b-x)=d, ∀ x∈ [0, b)
For ∀ i≠ N, i≠ d, ∀ x∈ [0, b)
μ k(i, t+x, b-x)=
End for
End for
Step 2 收敛性判定
If ∀ i≠ N, ∀ x∈ [0, b)
max
Otherwise go to step 1.
本文采用实际交通网络的拓扑结构Sioux Falls(SF)network[17].这有利于数值试验符合实际的交通状况, 有利于下一步的应用研究.所有算法都是通过Matlab计算机语言编程并且在Windows-XP(64)工作站(two 2.00 GHz Xeon CPUs and 4G RAM)条件下运行的.另外, 由于实际交通流数据采集的困难和缺失, 为了模拟实际交通网络中每个路段的行程时间采集的离散数据, 假设交通网络中每个路段的行程时间采集离散数据符合Gamma概率分布函数, 这也是符合实际交通网络行程时间的概率分布函数, 当然也可以假设其他的概率分布函数, 因为本算法针对的是交通网络行程时间的任意概率分布函数, 交通网络边的行程时间的概率分布函数的不同设定不影响验证算法的可行性和正确性.
边的随机行程时间
式中
为了模拟离散型动态随机网络模型, 设b=Lϕ 是行程时间预算, 其中ϕ 为划分的时间单元.这里取ϕ =2.对于任意的边(i, j), 随机行程时间
上述定义假设随机变量
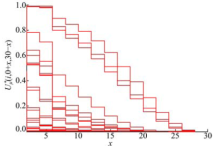
图1表示从节点i=1, 2, , et al., 24(i≠ 18)在t+x(t=0)时刻出发在b-x(b=30)时间内到达终点N=18的最大概率值
 | 图1 |
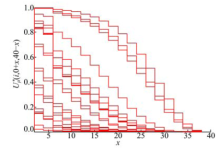
 | 图2 |
计算结果表明:
(1)因为数值实验中采用了离散型的随机变量, 所以函数
(2)因为本文采用的分段时段的概率分布函数表达式参数取值是不同的, 所以函数
(3)函数
(4)起点离终点越远, 则相应的
(5)起点离终点越远, 则相应的概率
针对交通网络中考虑风险的路径选择行为, 基于可靠性理论, 定义行程时间可靠度为路径的目标函数, 建立动态随机网络环境下最可靠路径模型.通过最优化理论把该问题转化为动态规划问题求解, 通过对实际交通网络的计算对提出的算法进行了验证.计算结果表明, 给定起始时间和预算时间, 本文算法可以获得动态随机网络自适应最可靠路径, 研究结果可为智能交通系统路径诱导子系统提供理论支撑和核心技术, 是对运筹学理论研究的扩展, 具有深刻的应用背景和重要的理论意义.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|