{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
小型光电编码器细分芯片的设计
[丁宁1, 2  , 李海彬
, 李海彬1, 2 , 彭乐立1, 2 , 余芝帅1, 2 , 常玉春1, 2 ]
, 李海彬]
|
|


作者简介:丁宁(1990-),男,博士研究生.研究方向:集成电路设计.E-mail:715173723@qq.com
为了实现在不增编码器体积和码盘刻线数的前提下提高中低精度小型光电编码器分辨力,设计了一种适用于小型光电编码器的细分芯片.首先,分析目前电子学细分方法的优缺点,折中分辨率,精度,电路复杂性和可集成性等因素,在相位调制理论基础上提出了把对空间相位位移的测量转化为对瞬时周期时间差值的测量的细分算法,并结合算法原理进行芯片架构总体设计.其次,利用Cadence软件设计了信号细分处理芯片的各个模块电路.然后,对芯片总体电路进行仿真得到调制信号瞬时周期值.最后,将细分后的测量角位移结果与理论基准值对比,并计算最终细分精度.实验结果表明:当光电编码器信号输入在1~100 kHz频率范围内,该细分芯片可以实现对光电信号的0~100倍细分.在输入100 kHz时细分精度达到0.4571'.与同类处理电路相比具有集成度高,细分辨向功能统一,可移植性好等特点,有一定的工程应用价值.
In order to improve the resolution of low precision small photoelectric encoder without increasing the encoder size and the scribed line number, an interpolation chip is designed that is suitable to small photoelectric encoder. First, the advantages and disadvantages of current electronic interpolation methods are analyzed, considering the resolution, precision, the circuit complexity and integration, and other factors. Based on the theory of phase modulation, an interpolation algorithm is proposed, which converts the measurement of spatial phase displacement to that of time difference value of instantaneous cycle. Then, the overall architecture of the whole chip is designed according to the algorithm principle, and each module of the chip is designed using Cadence software. The instantaneous cycle value of the modulation signal is obtained by simulation of the overall chip circuit. Finally, the measured spatial angular displacement after subdivision is compared with the theoretical value, and the subdivision precision is calculated. Experiment results show that, when the frequency of the photoelectric encoder signal input is in the range from 1 kHz to 100 kHz, the chip can realize optical signal segment of 0 to 100 times. When the input is at 100 kHz, the precision of 0.4571' can be achieved. Compared with other similar processing circuit, the designed chip has the advantages of high integration level, combining the distinguishing function and subdivision, good portability, and has certain engineering application value.
光电编码器是一种集光, 机, 电于一体的精密旋转式栅式位移测量装置[1].近年来国内外光电编码器朝着小型化, 高分辨率, 高频响的方向发展[2], 许多重要应用场合如航空航天技术领域不但对编码器测角精度和分辨力提出了较高要求, 而且对测量系统的体积提出了苛刻的要求.因此在不增加编码器体积的条件下提高测量分辨率和精度成了亟待解决的难题[3].光电编码器光栅信号的细分技术由此应运而生.光电编码器信号细分技术的性能一定程度上决定了测量的精度, 分辨率, 频率响应速度和可靠性, 使用先进的细分技术获得优于一个栅距的分辨率, 是提高栅式位移测量系统分辨率和精度的关键[4, 5, 6].
目前德国海德汉公司在研制和生产光电编码器及相关细分产品方面有着全球领先的技术水平, 该公司对产品的研发也反映了相关领域的发展趋势.其产品的最大输入频率可达500 kHz, 细分数可达4096倍, 技术水平远远领先于国内同类型产品[7].中国科学院长春光学精密机械与物理研究所研制的16位小型光电编码器采用8位粗码与8位精码相结合的方式, 在提高A/D精度后可实现对精码信号的1024细分, 分辨率为4.98″, 精度小于等于30″[8].然而国内对细分技术的研究起步较晚, 在技术水平, 产品集成度和成本控制方面与发达国家仍有差距, 因此, 积极研发自主技术产权的产品迫在眉睫.值得一提的是, 德国iC-Haus公司也有成熟的家族系列芯片产品, 专门为光电编码器及角度传感器信号处理提供各种解决方案, 其细分器芯片的细分范围从6~16位不等, 并带有信号自校准功能, 依靠片内集成的存储单元配置校正参数, 同时通讯接口种类齐全.但iC-Haus的产品往往需配合本家族编码器芯片使用, 可移植性受限.本文设计了一种适用于小型光电编码器的细分芯片.当光电编码器信号输入在1~100 kHz频率范围内, 该细分芯片可以实现对光电信号的0~100倍细分.在输入100 kHz时细分精度达到0.4571'.与同类处理电路相比具有集成度高, 细分辨向功能统一, 可移植性好等特点, 有一定的工程应用价值.
目前, 主要细分技术手段有光学细分, 机械细分及电子学细分三类[9].其中前两种方法是依靠硬件来实现的, 对码盘工艺水准, 机械加工, 装配水平要求较高, 主要适用于高精度的高端产品, 且随着细分数增加, 所需元器件数目大幅增加, 这对于缩小编码器体积, 控制成本, 提高系统可靠性都是不利的[10].而对于小型化, 低成本的中低精度编码器来说, 电子学细分则更为适合.电子细分包括软件细分和硬件细分, 其中软件方法细分数大, 速度快, 精度高, 但对原始信号质量和采样精度有较高要求; 硬件细分有直接四倍频细分, 移相电阻链细分, 载波调制鉴相细分, 锁相倍频细分, 时钟脉冲细分等, 传统的细分方法在细分数, 电路复杂度, 测量精度等方面均具有一定局限性[11].各种细分方法优缺点如表1所示.
| 表1 各种细分方法的优缺点[10] Table 1 Merits and drawbacks of some kinds of interpolation methods |
光电编码器的四路输出信号通常可表示为:
码盘光栅与指示光栅的相对位移
若
将式(1)(2)和式(3)(4)分别相减, 抵消掉直流量分量, 可得两路新正交信号:
现采用一组固定频率的正交载波脉冲对式(7)(8)进行斩波调制, 正交脉冲如下:
将式(7)(10), 式(8)(9)分别相乘再相加求和得:
滤除基波分量和高阶奇次谐波后, 只保留一次谐波量得到已调信号:
式中:
瞬时角频率变化量(频移)为:
因此, 可以通过测量已调信号瞬时频移来求瞬时角速度, 又因为近年来TDC技术逐渐成熟, 更希望把频率转化为时间, 从而有:
由于速度在极短时间内可视为连续量, 所以在一个已调信号周期内, 相对角位移可以表示为:
由式(16)可知, 在一个已调制信号周期内的角位移量
上述为编码器正转情况.对于编码器反转的情况, 有:
从而同理可得:
由此看出, 正转时载波周期大于调制信号周期, 反转时调制信号周期大于载波周期, 从而可以实现辨向的功能.
对于若干个调制周期总的位移有:
因此, 只要测量出几个调制信号周期的总时间, 就可获得总角位移量
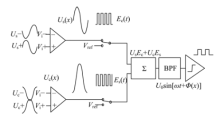
根据上述细分方法的公式推导, 本文设计了光电编码器信号细分处理芯片.整体芯片架构框图如图1所示.
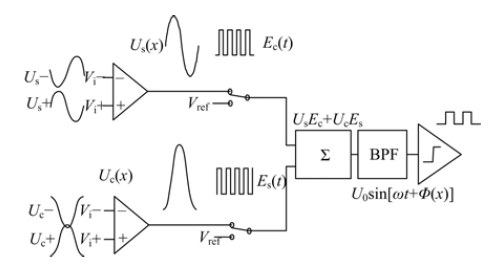 | 图1 整体芯片框图Fig.1 Overall chip block diagram |
芯片主体模块包括:差分信号减法电路, 载波信号调制单元, 加法电路模块, 通频带滤波器和比较器电路.
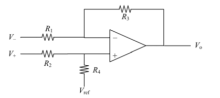
2.2.1 差分电路减法模块
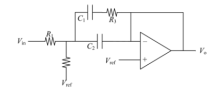
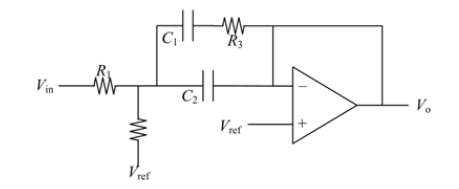
该部分电路实现的功能为:将两路相位相差180° 的差分正弦(余弦)信号做减法.所采用的结构如图2所示.
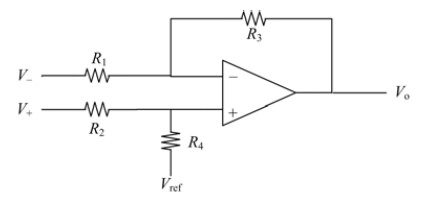 | 图2 差分减法电路Fig.2 Differential subtraction circuit |
如果令:
放大倍数为:
输入电阻为:
实际设计时, 运放采用两级密勒补偿运算放大器, 设计需保证足够大的增益和带宽以保证足够的放大精度和驱动能力.同时选取合适的电阻值, 电阻过大会牺牲面积, 对前级负载的压力也会增大; 电阻偏小波形会产生失真.
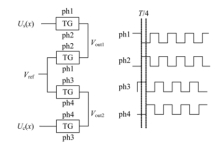
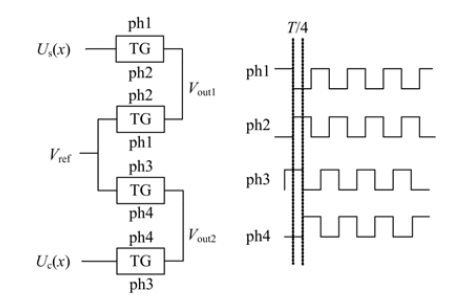
2.2.2 载波信号调制模块
传统载波调制是用低频调制信号去调制载波, 将低频信号的幅值(或频率或相位)加载到高频信号上, 使调制后的信号幅值(或频率或相位)与调制信号相同.在电路实现上应用模拟乘法器, 即将两个模拟量相乘, 实现起来较为复杂.为简化电路, 该芯片采用斩波调制手段, 通过时钟控制开关管的开启与闭合, 从而使输出按时钟频率在输入电压和参考电压间切换, 原理类似一个可控单刀双掷开关.传输开关模块电路及控制信号如图3所示.ph1, ph2, ph3, ph4为同频时钟, 其中ph1和ph2反相; ph3和ph4反相, 而ph1(ph2)和ph3(ph4)相位差值为± π /4(包含正转和反转两种情况).通过这两组时钟控制四路传输门交替导通, 从而进行电压的选通, 同时实现对信号的斩波调制.
设计开关管时应尽可能减少时钟沿的上升和下降时间, 尽量降低开关的导通电阻以减少电压损失.
 | 图3 传输开关原理图及控制信号时序Fig.3 Schematic of control switches & control timing diagram |
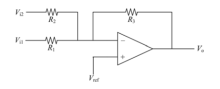
2.2.3 加法电路模块
该模块的功能是实现将经载波调制后的两个信号
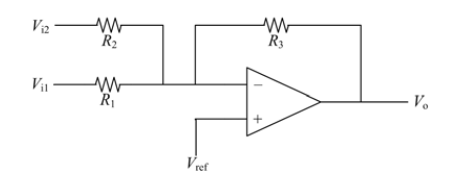 | 图4 求和电路Fig.4 Summation circuit |
若R3=R2=R1, 则
该模块的运放应具有高输入阻抗, 低输出阻抗及高开环增益和良好的稳定性.
2.2.4 通频带滤波器
由之前推导可知, 未经滤波的已调制信号如式(13)所示.现只保留一次谐波量即
 | 图5 二阶有源带通滤波器Fig.5 Second oder active band-pass filter |
电路传输函数如下:
其中:
对式(25)(26)(27)进行联立, 可推导出:
考虑到后级比较器的失调电压影响, 在滤波阶段可适当放大信号幅值以便克服后级比较器失调电压的影响.
2.2.5 比较器
由于带通滤波器得到的已调制信号Um仍为正弦信号, 为方便下一步测量, 必须通过比较器将正弦信号转换成方波信号且满足相应电平标准.因为调制信号的频率有一定范围, 所以相应对比较器速度有一定要求, 方波信号的周期应准确反映正弦信号的周期, 这又对比较器的精度提出了较高要求.可以说比较器的速度, 精度将直接决定测量的准确性.
比较器按结构分类可分为运放结构的比较器和Latch(锁存器)比较器.这两种比较器具有各自的优缺点, 前者能够分辨出较小的输入信号, 但工作速度慢; 而后者正好相反, 虽然工作速度很快, 但是对输入信号的分辨率低.实际应用中, 通常把这两种比较器级联使用, 能够很好地弥补二者的缺点.
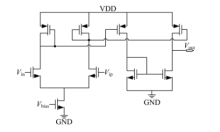
出于对输入信号频率和幅值范围的考虑, 本文采用一种由两个运放级联构成一个差分转单端的电压比较器, 结构如图6所示.
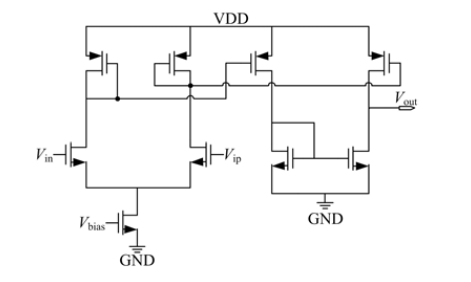 | 图6 比较器结构Fig.6 Structure of comparator |
该比较器第一级是以二极管连接的MOS为负载的差动对, 第二级为单端输出五管运放, 两级运放的叠加提高了总体增益降低了失调, 而单级的结构在速度和静态功耗上均有较好的优势.
由之前理论推导可知细分倍数正比于载波频率与输入信号的比值.由于编码器输入信号频率是随电机转速变化的量, 因此如果当载波频率固定, 细分倍数是实时变化的, 这不是我们所希望的.但载波频率实时调整是不现实的.因为载波频率将直接决定滤波器中心频率, 即决定电路参数值, 电路一旦设计完毕参数就定了.考虑到电路面积的因素, 该芯片滤波器部分设计了100 kHz和10 MHz中心频率两组参数修调档, 以保证低频及高频时均能对信号进行准确细分.
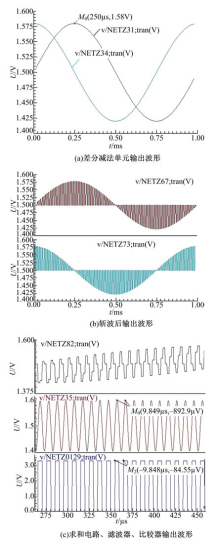
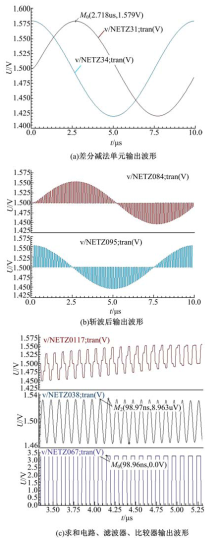
分别对输入信号为低频(1 kHz)及输入信号为高频(100 kHz)两种条件下的最大细分情况(最大至100倍)进行了仿真测试.输入信号1 kHz时, 载波信号100 kHz(100倍细分)各部分模块输出结果如图7所示.输入信号100 kHz时, 载波信号10 MHz(100倍细分)再次对电路进行功能验证, 结果如图8所示.
以上波形结果反映芯片各模块均能够实现预期的功能, 整体芯片基本完成了预期设计目标.
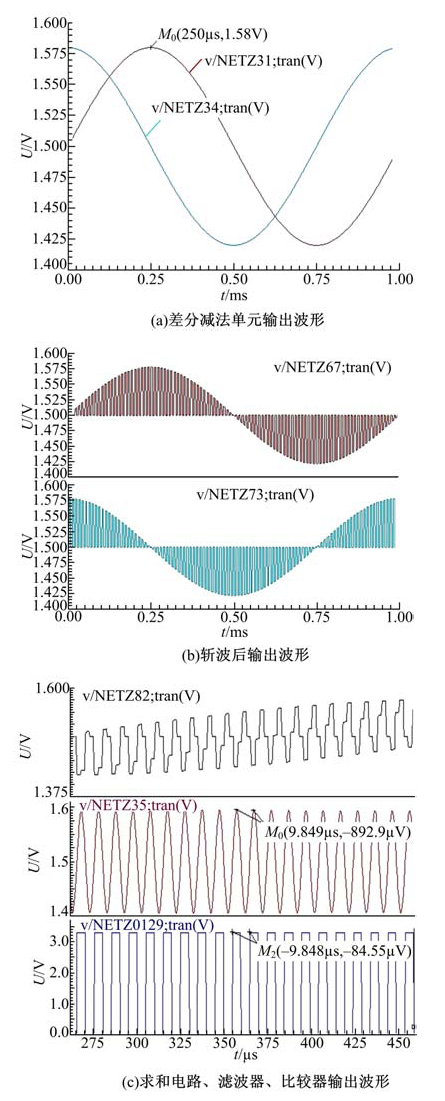 | 图7 输入信号1 kHz, 载波信号100 kHz各部分模块输出结果Fig.7 Waveforms of each block when input signal is 1 kHz while carrier signal is 100 kHz |
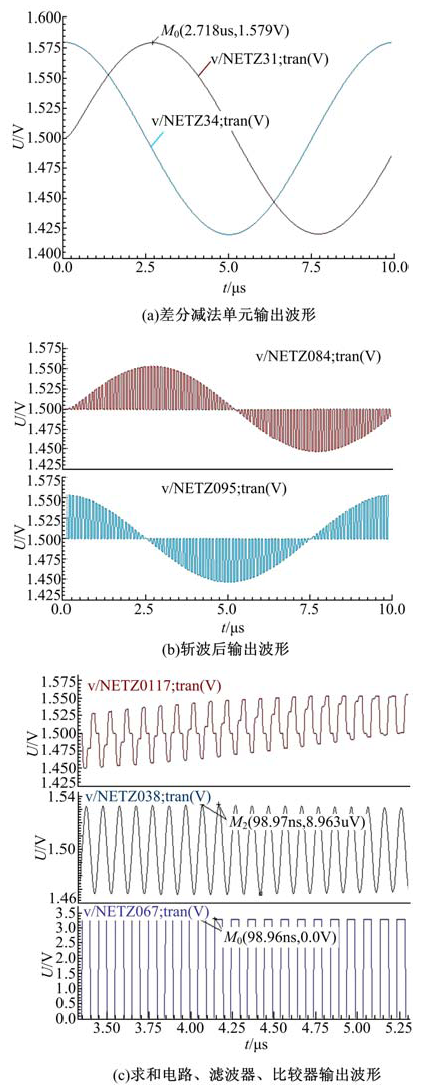 | 图8 输入信号100 kHz, 载波信号10 MHz 各部分模块输出结果Fig.8 Waveforms of each block when input signal is 100 kHz while carrier signal is 10 MHz |
由式(19)可知, 总的细分倍数为
| 表2 不同信号/载波频率细分结果 Table 2 Interpolation results of different frequency signal/carrier |
以小型光电编码器为研究对象, 研究了现有光电编码器电学细分方法及特性, 在相位调制理论基础上提出了把对空间相位位移的测量转化为对瞬时周期时间差值测量的细分算法.然后, 结合算法给出了芯片各模块电路的设计方法和实现方案, 并在Cadence下进行了电路设计和实现.最后, 对芯片进行信号链路测试, 不同输入信号频率和载波频率测试结果表明:该芯片可以对0~100 kHz输入信号实现至多100倍细分, 细分精度误差最大达到0.4571'.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|