



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于Hammer积分的三维地面磁共振高精度正演方法
[林君1  , 赵越
, 赵越1, 2 , 蒋川东1 , 李同1 , 刘孝男3 ]
, 赵越, 李同|
|


作者简介:林君(1954-),男,教授,博士生导师.研究方向:地球物理探测技术及仪器.E-mail:lin_jun@jlu.edu.cn
为满足三维地面磁共振正演计算的精度要求,本文提出了基于非结构不均匀四面体网格的Hammer积分算法.首先利用有限元方法实现了对地下空间的三维磁场计算,完成了地面磁共振灵敏度核函数表达式的推导.针对现有地面磁共振正演方法中常规网格尺寸大,计算精度差,细化网格尺寸小,但是数量大的问题,应用Hammer积分在常规网格中完成核函数的高精度计算.三维核函数和3个含水模型的正演仿真实验表明:基于Hammer积分的地面磁共振正演方法具有网格少,计算节点少,积分精度高的特点,能够高效解决核函数的正演计算问题.
To meet the accuracy requirement of surface three-dimensional (3D) Magnetic Resonance Spectroscopy (MRS) forward modeling. Hammer integration algorithm was proposed based on unstructured non-uniform tetrahedral mesh. First, finite element method was used to calculate the 3D magnetic field in the subsurface, and the sensitivity kernel expression was deduced. Then, to overcome the shortcoming of conventional mesh grid, that the precision becomes poor as grid size is large, while smaller grid size leads to enormous calculation task, Hammer integration was applied to calculate the kernel function with conventional grid. Synthetic results including 3D kernel function and aquifer models show that, using Hammer integration, higher precision can be achieved with fewer grids and nodes. The forward model can be calculated efficiently.
应用地面磁共振技术(Magnetic resonance sounding, MRS)探测地下水是近年来发展起来的一项尖端技术, 其优势在于针对目标无损探测, 效率高, 解唯一等[1].就目前而言, 地下水探测中多使用一维探测模型, 探测对象为层状水.而现实中常存在裂隙水, 岩溶水等复杂探测目标体, 其特征多表现为规模小, 水量分布不均匀, 因而需要更高的分辨率和探测精度[2].三维磁共振技术为上述问题的解决提供了很好的方法与途径, 但受其计算量大, 存储空间需求多, 程序运行效率要求高等问题的制约, 现阶段国内外成果不多[3, 4].2008年, Legchenko等[5]使用同一线圈一维探测装置对三维溶洞进行了探测研究, 但该方法得到的体积估计误差约在± 75%, 并于2011年在法国阿尔卑斯山脉鲁塞冰川进行了三维溶洞探测实验.这些结果仅是对溶洞位置和规模进行粗略估计, 得到的参数精度较低[6].在国内, 蒋川东[7]针对同一线圈三维地面磁共振探测分辨率低, 工作效率低的问题, 提出了阵列线圈对角线移动测量工作方式, 并对地下水探测过程中三维分辨率进行深入研究.尽管如此, 为完成三维地下水探测任务, 有效提升地面磁共振三维正演精度和计算效率仍是亟待解决的问题[8].
地面磁共振灵敏度核函数的正演计算直接关系到反演结果的准确性和可靠性, 因此必须对地面磁共振三维正演方法进行深入研究.本文首先使用四面体网格完成对地下空间三维剖分, 并利用有限元方法完成三维磁场强度计算.在此基础上推导了地面磁共振灵敏度核函数表达式, 并运用Hammer积分对磁共振核函数进行高精度正演计算.最后, 仿真计算了3个三维含水体模型, 并与传统的常规网格和细化网格正演计算结果进行了对比分析.
要完成对三维含水体的地面磁共振正演, 首先要计算发射和接收线圈在地下任意位置产生的磁场大小.目前的研究主要针对圆形大回线源作为等效计算模型, 地下空间为均匀导电半空间或层状导电介质[9].而对于方形线圈或地下空间复杂导电结构下的磁场计算, 则无法直接通过现有解析式完成.针对上述情况, 本文选择商业有限元计算软件COMSOL完成地下空间磁场仿真计算.
本文计算了在边长为100 m的发射线圈内通入频率为2330 Hz, 幅度为1 A的交变电流时, 地下任意位置产生的磁场B, 如图1所示, 其中黑色方框为MRS线圈.
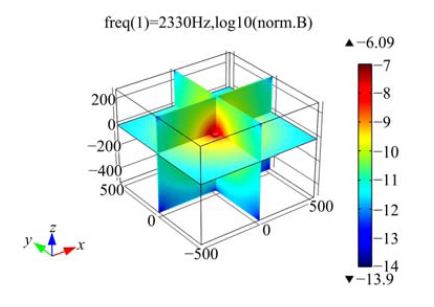 | 图1 地下三维空间磁场计算Fig.1 3D magnetic field calculation in the subsurface generated from a square loop(black line)on the surface |
在地面铺设三维探测线圈时, 有两个方向角度需要考虑:一是地磁场B0方向, 二是探测线圈法线方向
式中:
在求得新坐标系下感应磁场
在导电介质中, 激发磁场的垂直分量
式中:
通过推导可得两个方向相反的圆极化场
据此得到两个方向相反圆极化场的幅度值和单位方向矢量如下:
由以上推导可知, 地面磁共振探测核函数的三维形式为:
式中:
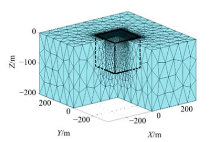
高精度数值计算磁共振灵敏度核函数是实现模型正演和反演计算的关键.要完成地面磁共振正演计算, 首先需要对探测区域进行三维网格剖分.考虑到距离线圈较近的探测区域分辨率高, 而较远的探测空间分辨率低, 故选取非均匀四面体网格剖分方式, 即根据分辨率设置四面体的大小.这样既保证了磁共振正演计算效率, 又保证了模型数据的精度, 用最少的网格数量实现高质量数据处理.
假定选取磁共振线圈为边长100 m的正方形线圈, 在铺设探测线圈下方100 m范围内, 以700 m× 700 m× 200 m为正演计算区域.其中线圈下方的200 m× 200 m× 100 m为主正演空间, 其他区域为次正演空间.全部区域均采用非均匀剖分方式, 主空间中线圈附近网格尺小较小, 最小为4.86 m.网格尺寸由主区域向次区域逐渐增大, 最大尺寸为16.6 m.次正演空间网格均较大, 最大尺寸为70 m,
 | 图2 地下探测空间三维网格剖分Fig.2 3D mesh in the subsurface |
这是为了尽量减小磁场计算时的边界影响.如图2所示, 最终建立地面磁共振三维探测网格, 共计106 007个剖分单元.
根据地下探测空间的三维剖分结果, 在所有剖分节点处计算三维磁共振核函数, 然后对每个剖分单元进行积分计算, 即可获得三维灵敏度核函数
式中:
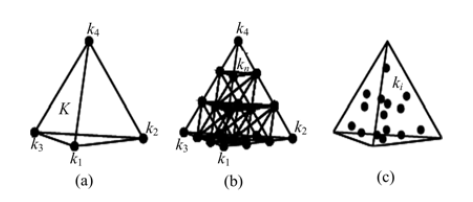 | 图3 Hammer积分点选取Fig.3 Selection of Hammer integral point |
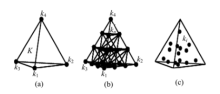
由于式(6)中存在正弦表达式, 灵敏度核函数在地表线圈附近具有快速振荡的特性, 因此需要大量密集的网格来计算三维核函数[11].尽管图2中已经存在十万余个剖分单元, 但是在线圈附近的网格仍然较大, 正演结果的精度偏低, 为此需要对正演网格进行细化.图3(b)显示了阶数为3的网格细化结果, 即将每个剖分单位细化为27个小网格.细化后的三维核函数
式中:
剖分单元细化后, 剖分单元变小, 线圈附近的网格变密, 因此正演将结果的精度提高.但是由于网格较多, 计算空间和时间将大大增加.
任取一个四面体单元, Hammer积分公式可表示如下:
式中:H为积分节点数量;
增加Hammer积分的计算节点数可以提高计算精度.本文选用5阶积分格式, 此时计算精度为O(h6), 其中, h代表网格的最小尺寸.计算节点数为H=15个, 分别按照积分节点M=(1, 4, 4, 6)原则选取.当M=1时, 计算节点位于四面体的中心位置; 当M=4时, 计算节点位于四面体的一个面的中点和其相对顶点的连接线上; 当M=6时, 计算节点位于四面体两个相对边的中点的连接线上.具体计算节点的位置坐标和积分系数由文献[12]计算给出.
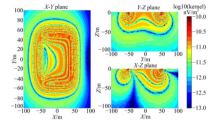
由表达式(6)可知, 磁共振核函数代表接收线圈对地下各位置处的含水量灵敏度.运用细化网格及式(8)完成了三维核函数数值计算, 结果如图4所示.仿真模型设定磁共振线圈边长100 m, Larmor频率为2330 Hz, 地磁倾角为60° , 激发脉冲矩q=10 A· s.图4中,
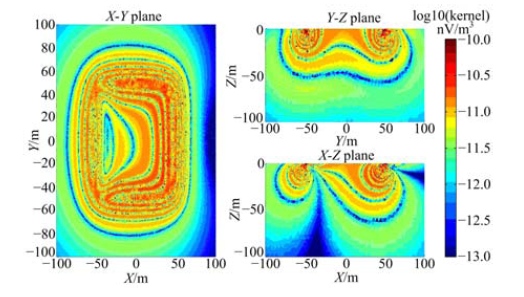 | 图4 地下空间磁共振核函数仿真计算结果Fig.4 Simulation of kernel function in the subsurface |
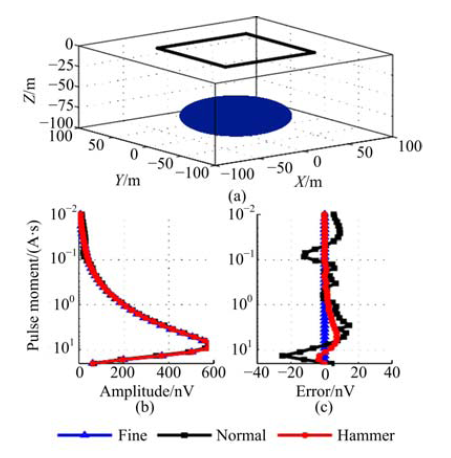
为了验证应用Hammer积分精度提升效果, 本文选取3个三维含水体进行磁共振正演研究, 模型网格剖分如图2所示.磁共振线圈放置在地面上, 边长为100 m, Larmor频率为2330 Hz, 地磁倾角为60° .现选取20个激发脉冲矩q, 范围为0.1~10 A· s, 按照指数间隔分布.3个三维含水体模型分别描述如下:① 浅层含水体.椭球体, 中心位置(0, 0, -20) m, X, Y和Z三个方向的半主轴大小分别为50 m, 50 m和20 m, 如图5(a)所示.② 深层含水体.椭球体, 中心位置(0, 0, -80) m, X, Y和Z三个方向的半主轴大小分别为50 m, 50 m和20 m, 如图6(a)所示.③ 多个含水体.两个椭球体, 中心位置分别为(± 50, 0, -20) m, X, Y和Z三个方向的半主轴大小均为20 m, 50 m和20 m, 如图7(a)所示.
 | 图5 浅层单一含水体模型与正演计算结果Fig.5 Forward calculation results with one shallow water-bearing object |
对于浅层含水体, 图5(b)分别计算了细化网格, 常规网格和应用Hammer积分的三维磁共振正演结果.根据前文所述, 细化网格的单元数最多, 计算精度最高, 因此可以作为理论结果.图5(c)计算了常规网格和应用Hammer积分后的正演结果与细化网格结果的绝对误差.如图5(b)(c)所示, 浅层含水体距离发射线圈较近, 而常规网格的单元数较少, 网格尺寸较大, 正演结果与细化网格的结果相差较大.尤其是在脉冲矩q较小时, 绝对误差达到250.8 nV, 平均误差为76.1 nV, 如表1所示.保持同样的网格尺寸及单元数, 应用Hammer积分后的正演结果与细化网格结果相差较小, 平均绝对误差为7.8 nV.一般磁共振探测仪器的最小信号探测能力约为10 nV, 因此, 应用Hammer积分后的正演结果满足计算要求.
 | 图6 深层单一含水体模型与正演计算结果Fig.6 Forward calculation results with one deep water-bearing object |
对于深层含水体, 图6(b)(c)分别计算了细化网格, 常规网格和应用Hammer积分的三维磁共振正演结果, 以及与细化网格的绝对误差.由于深层含水体距离线圈较远, 此处的三维磁共振核函数变化缓慢, 常规网格的计算精度有所提高.相对于细化网格, 最大绝对误差为25 nV.对于Hammer积分后的正演结果, 最大绝对误差仍然保持在10 nV以下.因此, 对于深层含水体, Hammer积分后的正演结果也满足计算要求.
 | 图7 多含水体模型与正演计算结果Fig.7 Forward calculation results with several water-bearing object |
对于多个含水层, 图7(b)(c)分别计算了细化网格, 常规网格和应用Hammer积分的三维磁共振正演结果, 以及与细化网格的绝对误差.模型包含两个浅层的小型含水体, 正好位于发射和接收线圈的两个边框下方, 距离线圈很近, 而这个区域的三维磁共振核函数变化最剧烈.常规网格正演结果显示了较低的计算精度, 与细化网格相比, 绝对误差最大达到375.2 nV, 平均误差为115.2 nV, 因此正演结果不满足计算要求.但是, 应用Hammer积分后的正演结果与细化网格相近, 平均绝对误差为7.7 nV, 因此该方法保证了较高的计算精度.
为分析细化网格, 常规网格及应用Hammer积分网格磁共振正演方法的计算时间和空间需求, 表1总结了本文所用3种网格的网格数量, 积分节点数, 计算时间和3个模型的绝对误差对比.由表1可知, 常规网格和Hammer积分网格所用的网格数量相同, 而细化网格的数量是其27倍.Hammer网格积分节点数和计算时间是常规网格的3.75倍和2.13倍, 而细化网格积分节点数和计算时间是常规网格的27倍和20倍左右.同时, 通过对比三个模型的绝对误差可以得知, 应用Hammer积分方法的三维磁共振正演计算比常规网格正演计算增加了3倍左右的时间和空间, 但是降低了平均9倍的绝对误差, 而细化网格需要增加20多倍的时间和空间.因此, 通过以上分析可知, 应用Hammer积分方法进行三维磁共振正演计算的精度高于常规网格, 计算效率高于细化网格.
| 表1 计算时间与空间对比分析表 Table 1 Analysis on computation time and space |
采用有限元方法计算了地下空间三维磁场, 在此基础上推导了灵敏度核函数和磁共振响应信号表达式, 并用Hammer积分方法完成了高精度和高效率的三维地面磁共振正演数值计算.3个三维含水体模型的仿真正演计算结果表明:基于Hammer积分的网格比常规网格计算精度高, 虽然计算节点数和时间增加了3倍, 但是绝对误差降低了9倍; 而相比于细化网格, 计算效率高约7倍.因此, 基于Hammer积分的网格能够高精度和高效率地完成三维地面磁共振正演计算.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|