



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于LCOS拼接的高精度高动态星模拟器设计
[孟遥1  , 张国玉
, 张国玉1, 2 , 刘石1 , 孙高飞1, 2 ]
, 张国玉, 刘石|
|


作者简介:孟遥 (1987-),男,博士研究生.研究方向:航天器地面模拟测试与标定技术.E-mail:505418584@qq.com
为了满足基于硅基液晶(LCOS)拼接的动态星模拟高精度与高动态的要求,对传统的拼接方法及修正方法进行了提升与优化.提出了将拼接系统的一块偏振分光棱镜(PBS)拆分为三块PBS的方法进行光学拼接.针对新的拼接结构,设计了长出瞳距,低畸变,消色差目镜系统,并进行了像质评价.重点阐述了像差对动态星模拟器星点位置的影响,详细论述了一种基于星模拟器光学系统位置像差的修正方法.结果表明:光学系统在12°×12°的视场范围内,相对畸变小于0.035%,且在奈奎斯特频率为 v=60 lp/mm时,全视场的MTF不小于0.8.新的拼接结构提高了两片LCOS显示对比度的一致性,加强了动态星模拟器在星敏感器动态测试中的可识别率.新的修正方法提高了星图的显示精度,经测试其星间角距误差小于7″,符合设计要求.
In order to meet the design requirements of high-precision and high-dynamics star simulators based on Liquid Crystal on Silicon (LCoS) splicing, the traditional splicing method and correction method were improved and optimized. A method of splitting a polarizing beam into three components was proposed to perform optical splicing. Based on the new splicing structure, a system with large papillary distance, low distortion, and an achromatic lens was designed, and the image quality was evaluated. The impact of aberration on the star position in dynamic star simulator was elaborated. A method to correct the position aberration based on the star simulator optical system was presented in details. Results show that, when an optical system is within a 12°×12° field of view, the relative distortion is less than 0.035%. In addition, when the Nyquist frequency is v= 60 lp/mm, the full field of MTF is no less than 0.8. The new splicing structure can improve the consistency of the contrast ratio between the two pieces of LCoS, and enhance the recognition rate of dynamic star simulator in a dynamic test of the star sensor. The new correction method can improve the accuracy of a star map display. The angular distance error is less than 7? after testing, which is in good agreement with the design requirements.
星模拟器是一种在地面上模拟星空, 以便对星敏感器的星图识别算法进行功能测试的检测设备[1], 按工作方式不同可分为标定型星模拟器和功能检测型星模拟器[2], 其中动态星模拟器为功能检测型星模拟器, 目的是在地面进行星图模拟[3].
随着飞行器导航与制导技术的发展以及飞行器任务不断变更, 星敏感器的性能要求越来越高, 这主要体现在需要提供更高的姿态精度, 更高的更新率以及更高的动态性能[4], 因而对作为其地面检测设备的动态星模拟器的要求也就随之提高.针对星敏感器的模拟需求, 高精度, 高动态是动态星模拟器的主要发展方向.目前对于动态星模拟器发展的主要制约在于其星图的显示器件, 现有的动态星模拟器主要采用薄膜晶体管液晶显示屏(TFT-LCD), 数字微镜器件(DMD)[5]及反射式硅基液晶(LCOS)这三种空间光调制器作为显示星图的器件.其中, LCOS以其单像元尺寸小, 对比度高, 刷新率高的优势逐渐成为主流.但是, 由于国内大显示器件生产技术和价格限制[6], LCOS所能购买的器件分辨率不高, 且显示区域为矩形, 限制了星图显示的范围, 因而采用两片LCOS进行光学拼接的方式扩大其显示范围, 增加分辨率.
虽然LCOS拼接从理论上解决了显示器件的问题, 但是在样机的研制测试过程中依然存在两片LCOS的对比度不一致以及星间角距误差过大的问题, 这些问题将降低星模拟器的精度及动态性能.本文针对这些问题, 设计了一种新的拼接方式, 并提出一种新的修正方法, 以实现动态星模拟器高精度, 高动态的要求.
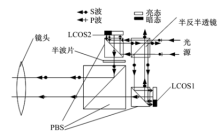
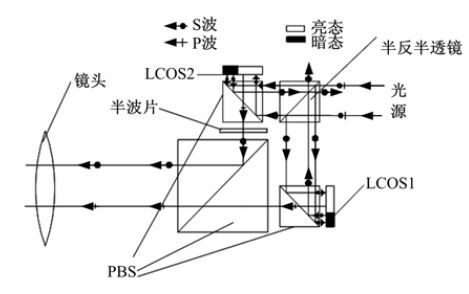
动态星模拟器工作原理为:星模拟器控制计算机接收来自姿态与轨道控制动力学仿真计算机提供的星敏感器坐标轴在惯性坐标系下的指向, 结合星表数据计算出当前时刻星敏感器视场内的星图, 通过接口及驱动电路送到空间光调制器上产生模拟星点.光源通过匀光系统均匀照明到空间光调制器上.空间光调制器置于准直光学系统的焦面上, 经空间光调制器调制后的光线通过准直光学系统后, 在被测星敏感器光学系统入瞳处产生无穷远平行光, 以模拟无穷远处恒星的星图[7].而LCOS拼接动态星模拟器的主要特点在于其利用光学拼接手段弥补了器件本身尺寸上的不足, 拼接原理如图1所示, 一束均匀的平行光经过PBS起偏形成线偏振光, 得到透射光为P波, 反射光为S波, 分别经LCOS反射调制, 如果LCOS经外部信号调制处于显示亮态时, 调制后线偏振光的光矢量方向有π /2的改变, 调制后光线经过PBS会分别透射和反射至镜头内; 当调制信号为暗态时, 经其调制后线偏振光的光矢量方向没有改变, 经PBS反射和透射至入射光方向.
 | 图1 基于LCOS拼接的动态星模拟器拼接原理图Fig.1 Splicing principle diagram of dynamic star simulator based on LCOS splicing technology |
动态星模拟器主要技术指标如下:视场为12° × 12° ; 出瞳直径≥ 20 mm; 出瞳距≥ 35 mm; 光谱范围为500~800 nm; 光学传递函数为MTF≥ 0.7, v=60 lp/mm; 相对畸变≤ 0.05%; 星间角距误差≤ 12″.
由于LCOS对于照明光线的偏振度有着严苛的要求, 拼接后的真实情况并非理想的工作状态.根据菲涅耳公式可以得到:当入射角为鲁斯特角时反射光中只有S波, 为线偏振光; 而透射光不管入射角是否为布鲁斯特角, 永远为部分偏振光[8].因此, 同一光源的光线以布鲁斯特角对两片LCOS同时照明时, 透射与反射光的起偏效率不相同, P波及S波能量并不相等, 且偏振度也不相同, 造成两片LCOS的对比度及能量都有区别.
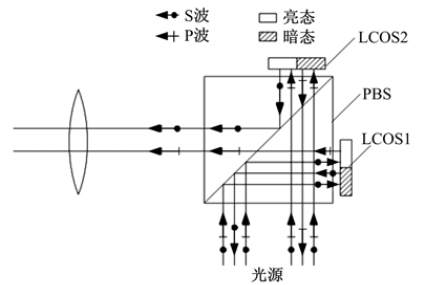
为了避免上述问题, 本文将采用多棱镜拼接的方式, 即将原一个PBS拆分为三块PBS结合半波片组成新的LCOS拼接系统, 并且用一块半反半透镜作为光源的分光器件, 其中半波片可以使光振动方向有
 | 图2 改进型拼接结构原理图Fig.2 Principle diagram of improved splicing structure |
2.2.1 准直光学系统设计分析
星模拟器可以模拟恒星所发出的平行光, 其成像光学系统为准直光学系统, 也就是将显示器件置于光学系统的焦面处, 模拟无穷远处所发出的光.由于星模拟器的作用是为星敏感器做地面检测, 其出瞳需要与星敏感器的入瞳重合, 因此星模拟器需要采用出瞳外置的目镜系统作为初始结构.
星模拟器对星点位置模拟的精度是星敏感器能否对星图识别的重要因素, 因此影响光学系统成像位置的像差需要在设计中作为主要的优化操作数.
在光学设计阶段主要需要考虑的像差有3种:① 畸变是横向的位置, 其对位置精度有最直接的影响, 因此应综合技术指标有针对性地选取初始结构.② 场曲作为轴向的位置像差, 从理论上在理想像面上的像差仅为按比例放大的弥散斑, 质心位置不变, 但是如果其最大像差量在焦深范围内, 即通过测试设备无法分辨其轴外点的离焦, 轴向像差将转化为横向像差且对星点位置精度造成一定程度的影响, 在设计过程中需要对场曲做针对性的校正.③ 像点中心偏移指的是主光线与实际像面交点的位置和点扩散函数(Ponit spread function, PSF)中心位置的偏差, 造成像点中心偏移的主要原因是成像光学系统存在彗差和倍率色差等垂轴像差, 在设计中对这些非轴对称的垂轴像差要进行相应的校正[9].
2.2.2 准直光学系统设计结果
光学系统的焦距由LCOS有效显示区域尺寸
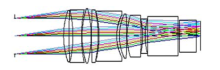
由于动态星模拟器的出瞳外置, 有较长的出瞳距, 且设计结构需要考虑畸变及场曲, 因而光学系统的初始结构选择埃尔弗目镜结构[10], 其主要特点是出瞳距离长, 负的场镜可以校正场曲, 畸变与无畸变目镜相同.在这种结构基础上, 对其进行透镜分离增加优化自由度, 加入重钡冕玻璃进行消色差, 优化后的结构图如图3所示.
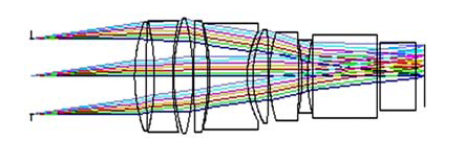 | 图3 光学系统结构图Fig.3 Layout of optical system |
2.2.3 准直光学系统像差评价
星模拟器的像差主要从两个方面评价, 一是成像质量, 二是成像位置.优化后的系统的像差曲线图如图4所示.图4(a)的MTF曲线表明, 当奈奎斯特频率为v=60 lp/mm时, 全视场的MTF不小于0.8; 通过图4(b)的点列图可以看到大部分是视场内, 像面内弥散斑直径小于艾里斑; 图4(c)为场曲及相对畸变图, 系统的畸变小于0.035%; 图4(d)为系统像面处全视场的点扩散函数(PSF)图, 因为PSF包含所有影响像质的像差, 因而可以得出结论:系统所成像点的能量中心与质心基本一致, 不过全是场内有一定量的场曲.
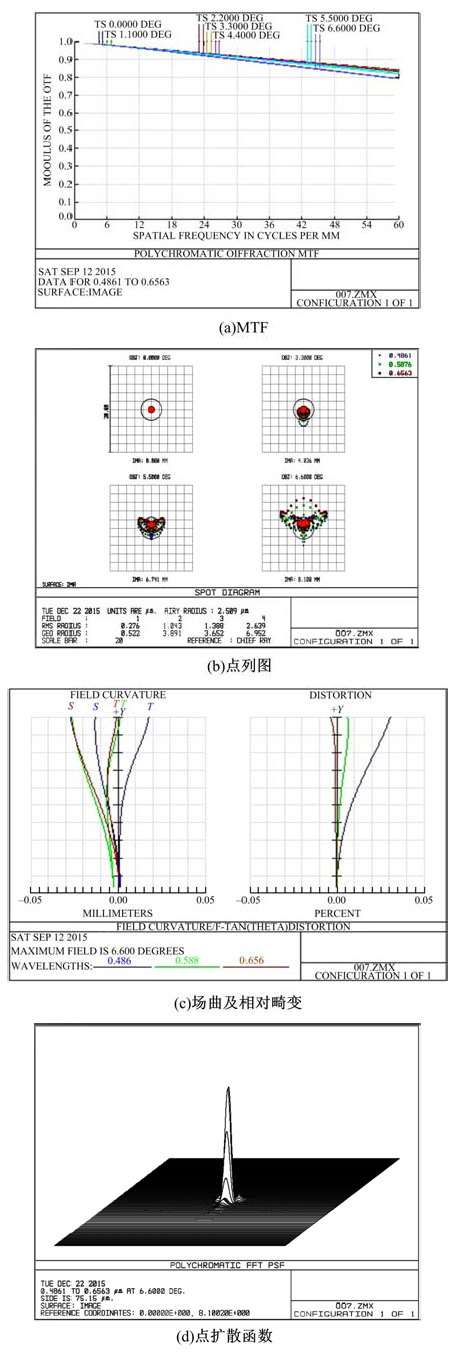 | 图4 光学系统像差图Fig.4 Aberration image of optical system |
动态星模拟器的精度取决于星间角距误差, 而影响星间角距误差的主要原因为星点位置误差.
2.3.1 像差对星点位置的影响
对于光学系统影响星点位置的主要像差为畸变, 不过光学系统在定焦的过程中, 不可避免地将产生离焦, 理论上仅影响系统成像的像质而不影响精度, 但是如果离焦量小于系统的焦深, 那么定焦时所确定的焦面无法确定是最佳焦面, 而其存在的离焦量将转化为焦距的误差最终带入系统的星间角距误差中.如图5所示, 图中AA'为最佳焦面, BB'为在焦深范围内的实际像面, 且AA'=BB'=h, 则实际视场角小于理论视场角, 误差角为γ .场曲所带来的横向误差与离焦类似, 场曲等价于随视场变化的离焦, 因而其在焦深范围内也会带来同样的问题, 且对星间角距的影响将会是非线性的.
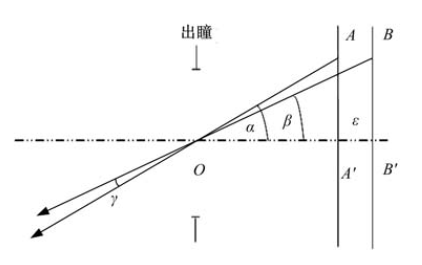 | 图5 离焦造成的星间角距误差Fig.5 Angular distance between star error by defocus |
2.3.2 星点位置修正方法
在修正星间角距的过程中, 为了尽量避免光学系统像差对于星点位置的影响, 需要根据设计值拟合出光学系统在理论像面上横向偏移量的变化曲线, 即畸变与场曲分别随视场变化所引起的星点位置偏移量.
畸变的横向位移表达式[11]为:
式中:
场曲的横向像差表达式为:
式中:
根据不同的视场可以得到由场曲及畸变引起的横向像差(即主要的位移变化量), 表达式为:
将其作为修正曲线输入星点修正程序中, 所得到的星点位置的偏差可近似为由剩余像差及离焦引起.
剩余像差及离焦的横向像差表达式为:
式中:
对修正后星点位置进行测试, 利用Matlab通过最小二乘法拟合得到星间角距误差关于像高的曲线:
且
因此离焦量为:
对系统离焦量进行修正后, 再次修正横向像差即可得到最终星点位置.
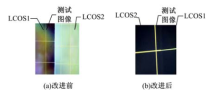
采集了动态星模拟器改进前, 后的图样, 改进前的测试图如图6(a)所示, 改进后的图样如图6(b)所示.虽然所测试图像并不相同, 但是通过比对两张采集图可以看到, 改进后LCOS1和LCOS2背景与测试图像的对比度与改进前相比有大幅度提高, 基本达到一致, 星敏感器采集图像时的杂散光大幅度降低, 动态性能得以提升.
 | 图6 测试图象采集图Fig.6 Text image |
通过对畸变波像差系数进行拟合, 可以得到其关于相对像高的函数表达式:
将动态星模拟器光学系统设计的参数及波像差系数代入式(3)可以得到:
将此函数作为修正曲线输入星模拟器修正程序, 用来修正星点位置.
通过莱卡5100A经纬仪进行实际测量可以计算出星间角距误差, 将其拟合为关于相对像高的一次曲线, 根据式(6)可以得到:
根据式(7)可以求得离焦量为:
修正完成后对整幅图像用经纬仪进行测试, 选取相对于中心点的星间角距误差较大的方向绘制成随视场的变化曲线, 如图7所示, 所测量的星间角距误差均小于7″, 满足设计要求.
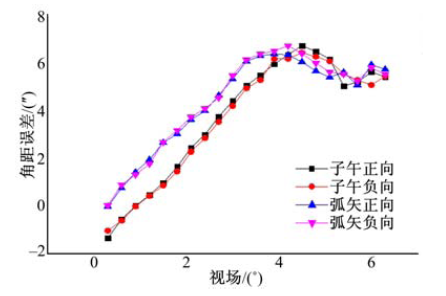 | 图7 星间角距误差随视场变化曲线Fig.7 Variation curve of the angular distance between star error with field of view |
从影响LCOS拼接动态星模拟器性能的问题出发, 通过改变拼接结构提高了两片LCOS对比度的一致性, 从而加强了动态星模拟器在星敏感器进行动态测试过程中的可识别率.结合设计的光学系统, 提出了一种基于位置像差的星间角距修正方法, 并且在实际测试中验证了对精度的要求, 实现了星敏感器对于所识别星图高精度的需求.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|