{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
时变遗忘因子动态DOA跟踪算法
[单泽彪1, 2  , 石要武
, 石要武1, 2 , 刘小松1 , 李新波1 ]
, 石要武]
|
|


作者简介:单泽彪(1986-),男,博士研究生.研究方向:阵列信号处理,DOA跟踪.E-mail:zbshan@126.com
针对目标信号源波达方向(DOA)实时变化的情况,提出了一种时变遗忘因子的自适应样本协方差矩阵更新方法.时变遗忘因子根据DOA变化的快慢自适应调节自身的大小,从而合理地调整历史数据及当前采样数据在协方差矩阵更新过程中所占的权重.在更新协方差矩阵后,对其直接应用最大似然估计方法,并将序列二次规划(SQP)应用于似然函数的优化求解上,最终实现了DOA的动态跟踪.仿真结果表明:该算法具有解相干的能力和良好的跟踪精度,并且在小样本,低信噪比下仍能达到比较满意的跟踪效果.
To track the Direction of Arrival (DOA) of the moving targets quickly and accurately, an adaptive subspace updating algorithm with a variable forgetting factor is proposed. First, this tracking algorithm adaptively adjusts the weights of current and historical data in a covariance matrix according to the DOA change speed. Then the maximum likelihood estimation algorithm is used and the Sequence Quadratic Program (SQP) is applied to optimize the likelihood function in order to reduce the computation cost of the algorithm. Experimental results show that the proposed DOA tracking algorithm has the ability to track coherent sources and obtain acceptable tracking results even under the condition of low SNR and small snapshot number in comparison with other methods.
静态目标波达方向(DOA)估计问题近年来得到了广泛关注和重点研究[1, 2, 3], 然而在雷达, 声纳等领域的工程实际应用中, 由于目标信号源通常是移动的, 这就需要对运动目标的DOA进行有效的跟踪估计.如果直接利用静态DOA估计的算法, 则需要不断重复地对信号协方差矩阵进行特征值分解或奇异值分解, 运算量过大.为了解决这一问题, 子空间跟踪技术[4, 5, 6]得到了广泛研究, 并且已有多种算法相继被提出.其中, 比较著名的有近似投影子空间跟踪(PAST)算法[7]和紧缩近似投影子空间跟踪(PASTd)算法[8], PAST与PASTd算法由于收敛速度快而得到广泛应用, 然而它们得到的子空间的正交性不强; 随后Abed-Meraim等[9]提出了改进算法, 即正交近似投影子空间跟踪(OPAST)算法.但是以上算法均未考虑到遗忘因子的可变性和目标源信号的相干性等问题, 致使算法的应用范围受到了限制.
遗忘因子的大小决定着历史数据和当前采样数据在信号协方差矩阵中所占的权重, 进而影响跟踪速度和稳态误差这一对矛盾问题.胡茂兵等[10]在前人研究的基础上分析了遗忘因子的可变性等问题, 但只是定性地把目标源信号分为快变和慢变两种, 进而确定了遗忘因子的两种可能性选择, 显然这无法满足情况复杂多变的实际应用需求.针对该问题, 本文提出了一种时变遗忘因子的自适应样本协方差矩阵更新方法, 该方法根据目标信号源DOA变化的快慢自适应调节遗忘因子的大小, 继而调整当前数据和历史数据在协方差矩阵中所占的权重, 在保证了获得较小稳态误差的同时又可获得较快的跟踪速度.
针对目标源信号相干时的场合, Rao等[11, 12]直接利用性能优越的最大似然估计方法对其进行跟踪, 避免了不断重复地进行特征值或奇异值分解等运算, 在低信噪比或小快拍情况下获得了较高的跟踪估计精度.但是最大似然函数的求解是一个非线性多维求解过程, 计算量过大, 所以在目标信号源DOA变化较快时其无法保证动态跟踪的实时要求.刁鸣等[13]把粒子群算法应用于似然函数的求解上, 在一定程度上加快了寻优的过程, 提高了跟踪的速度, 但是粒子群算法易陷入"早熟"往往不易搜索到全局最优.并且, 如粒子群算法的随机性优化算法[14, 15]等属于"盲搜索"方法, 它们在搜索过程中没有利用似然函数的梯度等相关方向性信息, 因此造成了有效资源的浪费, 这也是一般随机性优化算法的共有缺陷.针对以上问题, 本文将SQP应用于似然函数的求解中.SQP是一种非常优秀的非线性全局优化方法[16], 可以充分运用DOA估计中已知的模型梯度这一有效信息, 再加上它本身具有的局部超线性收敛特性, 可以快速且准确地搜索到全局最优, 最终实现DOA的动态跟踪估计.文中最后进行了应用SQP方法与采用粒子群算法, 遗传算法等随机性优化算法的仿真对比实验, 结果表明本文方法不仅具有更快的寻优速度, 而且还具有更高的跟踪估计精度.
假设有一个由M个阵元构成的线列阵, 其阵元位置为(0, d1, , et al., dM-1).同时假设具有相同载频的, 各信源波达方向角分别为(θ 1, θ 2, , et al., θ P)的远场窄带运动目标信号源的数量为
式中:
式中:
式(1)可以写成如下矩阵形式:
式中:
阵列接收向量
在静态目标条件下, 因为实际接收到的数据矩阵是有限长的, 所以阵列协方差矩阵用采样协方差矩阵
式中:
在实际应用中, 目标信号源的DOA通常是随着目标本身的运动而变化的, 所以对其进行采样后所得到的包含目标角度信息的数据矩阵
在进行动态DOA跟踪估计时, 常用的子空间跟踪类算法PAST算法及其改进算法中的阵列信号协方差矩阵用下式进行更新估计:
式中:α 为遗传因子, 满足0≤ α ≤ 1, 其反映的是历史数据及当前采样数据在
针对具有恒定遗忘因子的类PAST算法无法解决同时获得较小的跟踪误差和较快的收敛速度这一对矛盾问题, 本文提出了一种时变遗忘因子的自适应协方差矩阵更新方法, 即:
式中:
最大似然估计是基于统计理论估计方法中的一种最优估计, 在阵列信号处理中, 因其优越的估计性能和具有良好的解相干能力, 一直被广泛地应用于波达方向等参数的估计问题中.因此本文用它来实现动态目标的DOA跟踪估计.
如式(3)所示, 噪声分量是均值为零, 协方差为
对式(8)两边同时取负对数, 得到对数似然函数:
式(9)是一个关于未知参量
式中:
把式(10)(11)代入式(9), 同时忽略常数项, 则得到线阵列波达方向
式中:
由上可知, 波达方向估计就转化为求一个带不等式约束的优化问题, 式(12)的求解需要非线性多维搜索实现, 本文采用SQP方法对其进行优化求解.
SQP方法是求解带约束优化问题的最优秀算法之一, 与其他优化算法相比较, 它具有收敛速度快(超线性收敛), 计算效率高, 数值稳定等优点.似然函数的SQP优化求解的实现分为三步:拉格朗日函数的Hesse矩阵的BFGS近似更新, 二次规划(QP)子问题的求解和一维搜索与似然函数的计算.
(1)Hesse矩阵的BFGS近似更新
在SQP每次迭代的过程中, 利用拟牛顿法的思想可以避免直接计算Hesse矩阵, 从而提高计算效率, 即用Broyden Flether Goldfarb Shanno(BFGS)的变尺度法计算一个正定拟牛顿矩阵
式中:
当
当
式中:
(2)QP子问题的求解
SQP方法的基本思想就是利用一系列QP子问题来近似逼近原问题, 因此SQP方法的每次迭代都需要求解一个QP问题, 本文中其形式为:
式中:
(3)一维搜索与似然函数的计算
利用Armijo非精确一维搜索方法获得效益函数的迭代步长
把
在应用SQP方法求解上述似然函数时, 需要已知似然函数
首先, 在此引入一个中间向量
其中向量
式中:W为协方差矩阵R的Hermite平方根, 即
其中
则结合式(19)可得
式中:
再把式(21)代回式(20), 经整理可得
进而可得似然函数的梯度为:
式中:
为了加快初始跟踪时寻优的速度, 利用下述方法进行初值的确定.在开始跟踪后, 则应用上一时刻的DOA估计值作为当前时刻寻优的初始值.
首先, 求出第一个信源的DOA初始值:
然后假定第一个信源即位于
按照上述方法依次进行下去, 直至求出
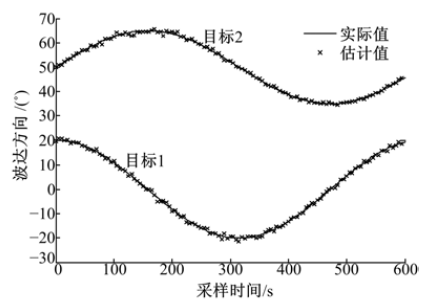
为了验证上述所提方法的可行性与有效性, 对算法进行了100次独立蒙特卡罗跟踪实验, 其中每次跟踪时长均为600个采样时刻.设有两个非相干运动信号源目标, 初始波达方向角分别为20° 和50° , 并且各自按照
式中:
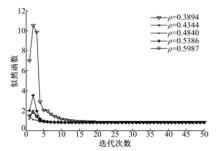
由于DOA估计问题中似然函数的约束条件比较宽松, 导致SQP算法中惩罚因子的取值对整个算法的收敛性并无多大的影响, 然而在利用Armijo方法进行一维搜索的过程中, 斜率系数
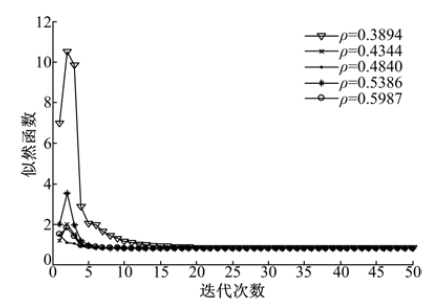 | 图1 不同系数ρ 时算法的收敛性比较Fig.1 Comparison of convergence for the algorithm with different coefficient ρ |
从图1中可以看出:针对本文中似然函数的优化求解, 在参数
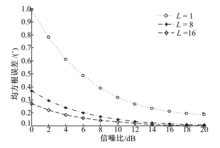
实验1 不同采样快拍数跟踪精度对比实验.每一时刻采样快拍数取值分别为
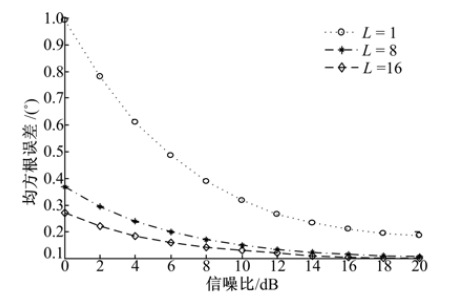 | 图2 不同采样快拍数均方根误差比较Fig.2 RMSE of DOA tracking with different number of snapshots |
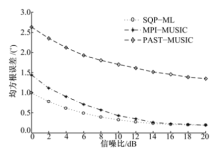
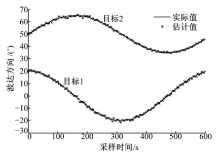
实验2 与其他跟踪算法之间的性能对比实验.选取了两个比较典型的子空间类跟踪算法:PAST算法[7]和基于幂迭代的子空间跟踪(MPI)算法.由于PAST算法与MPI算法本身无法对相干信号源目标进行跟踪, 故仍采用非相干信号源目标进行算法对比实验.图3给出了3种不同跟踪算法对DOA跟踪的均方根误差变化曲线.从图3中可知:与PAST-MUSIC及MPI-MUSIC两种算法相比, 本文所提算法具有更高的跟踪估计精度, 主要原因有两个:一是本文所提算法中采用的最大似然估计是一种渐进无偏估计; 二是本文算法中应用的是时变遗忘因子的自适应协方差矩阵更新方法.
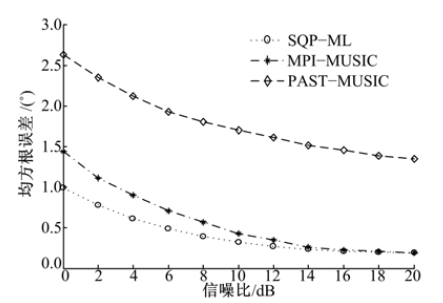 | 图3 不同跟踪算法均方根误差比较Fig.3 RMSE of DOA tracking compared with other tracking methods |
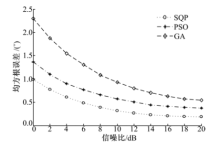
实验3 与随机性优化算法的性能对比实验.采用遗传算法(GA), 粒子群(PSO)算法[13, 17]与本文SQP方法对似然函数进行优化求解, 其中以上两种随机性优化算法的迭代次数均为120, 种群数量均为70.图4给出了上述3种优化算法对DOA跟踪的均方根误差变化曲线.从图4中可以看出:遗传算法或粒子群算法由于迭代次数及种群数量的限制, 不能保证每次都能搜索到全局最优, 整体收敛性较差.与之相比, SQP方法能够很好地对似然函数进行优化, 基本每次均可找到全局最优解, 数值求解稳定, 精度较高.
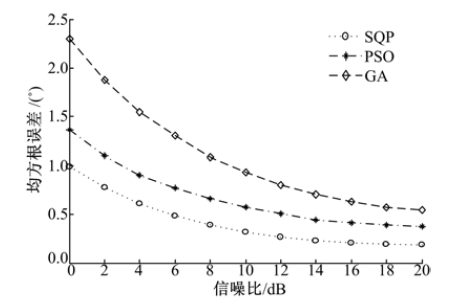 | 图4 不同优化算法均方根误差比较Fig.4 RMSE of DOA tracking compared with other optimization methods |
表1给出了以上3种优化方法在DOA跟踪中每次寻优的平均计算时间.实验所用电脑处理器为AMD Athlon(tm)X2 240, 主频为2.80 GHz, 内存为2 GB, 仿真软件为MATLAB 2010a.从表1中可以得知, 相同信噪比下, 应用SQP对似然函数求解平均寻优用时均小于另外两种寻优方法, 原因为:① SQP方法在每步迭代过程中都运用了梯度这一方向性信息; ② SQP方法在每一时刻开始寻优时都利用了上一时刻的DOA估计值作为本时刻的初值, 而另外两种随机性算法没有运用到上述两个有效的信息.随着信噪比的不断下降, 过大的噪声对梯度的正确指向性影响加剧, 导致寻优迭代步数增加, 致使寻优所用时间有所增加.综上分析可知, SQP方法可以用较少的计算时间实现对似然函数的优化求解, 保证了算法目标跟踪时的快速性和实时性.
| 表1 平均计算时间比较 Table 1 Average computing time of DOA tracking s |
针对动态DOA跟踪估计问题, 本文提出了一种时变遗忘因子的自适应样本协方差矩阵更新方法.在更新协方差矩阵后, 直接对其进行最大似然估计, 避免了不断重复地进行特征值或奇异值分解等运算.为了减少最大似然方法的运算量, 将SQP方法应用于似然函数的优化求解上, 较大程度地加快了寻优的过程, 保证了DOA跟踪的快速性和实时性.与其他方法相比, 本文方法具有寻优时间短, 估计精度高和可以解相干等特点, 并且在小快拍, 低信噪比条件下仍能达到比较满意的跟踪效果.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|