

{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于邻居节点分组的认知无线电Ad Hoc网络公共控制信道分配算法
[杨立标 , 赵洪林, 贾敏]
, 赵洪林, 贾敏]
, 赵洪林, 贾敏]
|
|


作者简介:杨立标(1980-),男,博士研究生.研究方向:认知无线电Ad Hoc网络.E-mail:libiao_yang@126.com
针对目前认知无线电Ad Hoc网络中公共控制信道分配在网络拓扑变化下性能差以及对主要用户活动鲁棒性差等问题,提出了一种基于邻居节点分组的公共控制信道分配算法.该方法根据认知无线电Ad Hoc网络频谱异构性对认知节点及其1跳邻居节点进行分组操作,然后利用最大边二分团建立起分组认知节点与可用信道集的映射关系,最后将控制信息时延和控制信道吞吐量联合起来构成可用控制信道效用函数,进而选择具有最大效用函数值的可用控制信道作为邻居节点组的最优控制信道.仿真结果表明:该算法性能优越,在认知节点密度和主用户数量增加时,能优化公共控制信道选择并有效降低业务传输时延,较好地适应了认知网络信道可用性空-时变换特性.
Current Common Control Channel (CCC) allocation in Cognitive Radio (CR) Ad Hoc network possesses several shortcomings, such as poor allocation performance in high fluctuating topology structure and poor robustness to the primary activities. To overcome these shortcomings, a novel neighboring group based CCC allocation algorithm is proposed. First, the CR node and its 1-hop neighbors are grouped based the spectrum heterogeneity. Then, the mapping from the grouped CR nodes and the idle CCC set is formulated as a maximum edge biclique problem. Finally, a novel utility function for each available CCC selection is established according to the control massage delay and its throughput; and the CCC in the set with the largest utility function value is selected as the optimal CCC. The algorithm has the advantages of robustness to primary activities and facility in dedicating control channel allocation by the agile grouping of local nodes. Simulation results show that the proposed algorithm is effective in reducing the normalized end-to-end delay when CR node density and primary user number increase; and it adapts to spatial-temporal variation in spectrum availability.
随着无线通信技术的快速发展, 认知无线电(Cognitive radio, CR)作为一种有效缓解频谱资源短缺的技术手段在信息通信领域得到了广泛应用[1, 2].特别地, 在认知Ad Hoc网络中, 次要用户(SU, 又被称为"认知节点")需要在缺少中心设施的情况下承担起频谱相关的认知功能[3, 4].因此, SU必须与邻居节点进行控制信息交换以改进系统输出并提高频谱利用效率.其中, 控制信息包含主用户活动, 信道可用性, 网络拓扑变化以及路由等参数.所以, 建立可靠且"按需"的公共控制信道以方便控制信息传输显得尤为重要.
目前, 认知网络中公共控制信道分配算法一般分为专用公共控制信道分配和基于分组的公共控制信道分配两种[5].鉴于认知Ad Hoc网络动态特性较为复杂, 对所有SU可用的全局性公共控制信道分配算法实现复杂度高.因此, 本文重点讨论基于分组的公共控制信道分配算法.Kim等[6]依据网络连接状态, 提出了基于分簇的公共控制信道分配算法.文献[7]给出了基于频谱机会的公共控制信道分配算法, 其原理也是对网络内节点进行分簇.但是上述分簇算法并未考虑到节点移动性及控制信道覆盖范围.文献[8]将公共控制信道选择过程归纳为群智能优化问题, 算法依靠节点间的相互协作选择出性能最好的公共控制信道.而Hsiu等[9]提出的空间变化控制信道分配算法(SVC)则为移动节点提供了一个可用控制信道集, 网络中节点可根据"Fellow"信息的握手协议进行邻居的发现过程.尽管如此, 认知Ad Hoc网络公共控制信道分配仍然面临以下两方面挑战:一是公共控制信道频繁重分配所带来的控制开销.由于SU的移动性和主用户的活动, 当原控制信道失效后, SU需要重新选择公共控制信道交换控制信息.鉴于控制信道的频繁重建将产生巨大的网络控制开销, 因此, 需要有效的网络拓扑管理策略来减少开销.二是频谱异构性.由于认知Ad Hoc网络存在频谱异构性, SU通常会感知到不同的本地可用信道并形成列表.因此, 在控制信道覆盖范围内具有相似特性的邻居节点需要有共享可用控制信道集.
本文提出一种基于邻居节点分组的公共控制信道分配算法.该算法根据频谱可用性空-时变化的特性, 将次要用户与其1跳邻居节点进行分组.特别地, 将邻居节点分组与其对应的可用控制信道集的映射关系构造成最大边二分团问题.最后, 算法将控制信息的时延和输出联合起来作为最优控制信道选择标准, 提高了分配算法的有效性.
认知Ad Hoc网络系统模型如图1所示.
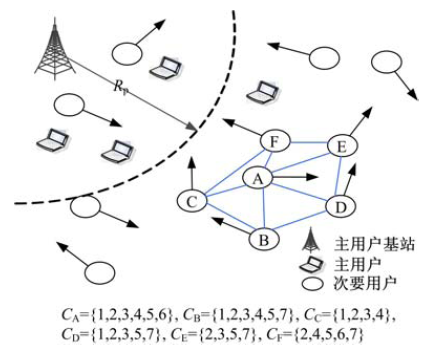 | 图1 认知Ad Hoc网络中6节点连接图Fig.1 Connectivity graph of a 6-node in CR Ad Hoc networks |
假设认知Ad Hoc网络中有
在认知Ad Hoc网络中, 认知节点与其1跳邻居通过可用控制信道集来交换控制信息.因此, 邻居节点发现过程就是SU在相同控制信道覆盖范围内发现其1跳邻居的频谱管理策略.在缺少专用公共控制信道的情况下, 每个认知用户通过本地信道感知来获取可用信道列表并发现其通信范围内的其他邻居用户.然后, 邻居节点间通过建立链接在相同的控制信道上进行控制信息交换, 且只有在邻居节点间在当前控制信道上的链路建立完毕后才能进行分组初始化操作.
考虑到认知Ad Hoc网络的频谱异构性, 主要用户对每个信道有优先使用权.对于控制信道来说, 其特点可以描述为:信道可用性和信道增益, 分别可定义为如下矩阵[10]:
信道可用性:
信道效益:
每个节点可以通过改变传输功率来调整其传输范围, 从而避免对主用户活动造成干扰, 且有
式中:
邻居节点发现过程可以描述如下:
步骤1 节点
步骤2 对于可用信道
步骤3
上述过程可通过图1来解释.首先, 每个认知节点通过感知获得可用控制信道集, 如
当
为了避免可用信道集列表与邻居节点集有较大的差异, 本文对文献[11]提出的最大边二分团的基本概念进行扩展, 以保证每个分组中节点数目最大化的同时满足可用控制信道数量最小化.当
约束条件为:
不等式(3)可进一步写为:
式(5)表明二分团中顶点数量的分数变化要大于边数量的分数变化.最大边二分团在邻居节点分组过程中的作用可解释为:当邻居节点组中的节点都有相同的可用信道列表时, 最大边准则可保证组内节点数目最大化, 从而简化认知Ad Hoc网络拓扑结构.另一方面, 如果组内节点可用信道列表差异较大时, 最大边准则根据信道列表减少组内节点数量.通常情况下, 最大边二分团
最大二分图案计算流程如下:
1. Input: Gi=(Vi, 1∪ Vi, 2, ε i) // SUi的二分图
2.Ui, 2← Vi, 2
3. for j=1 to |Vi, 1 | do
4. 寻找 SUk∈ Vi, 1在Vi, 1中所有节点中最大化|Ui, 2⋂Ck|
5. if Ui, 2∩ Ck=Ø then
6. break
7. else
8. Si[j]=k, 将k归入到已验证集合Si中
9. Vi, 1← Vi, 1-SUk, Ui, 1← Ui, 1∪ SUk, Ui, 2← Ui, 2∩ Ck
10. Pi[j]=|Ui, 1|× |Ui, 2|计算二分团边
11. end if
12. end for
13. 寻找j* =argmaxjPi[j]
14. return
步骤1 计算最大边二分团.对于本文较小的二部图, 通过利用贪婪算法(最大二分图案计算流程)来解决二部图中寻找最大边二分团这样一个NP完全问题.每次迭代都检验
步骤2 更新邻居节点组内节点信息.由于控制信道可用性变化以及节点的移动性,
或
且
或
首先, 本文比较两个二分团的边数目.如果两个二分团具有相同的边数, 则比较两个二分团邻居节点集中节点的数量.如果节点集中用户的数目也相同, 则选择具有最大索引值的认知节点构成的二分团.当节点SUi 更新其二分团(即
下面通过图1来说明步骤2.在图1中, 节点
步骤3 邻居用户组内节点检验.在步骤3中,
步骤4 未分组节点.当有节点由于其移动性或主用户活动出现, 导致其同所有邻居节点连接失败时, 则该节点处于未分组状态, 根据步骤3该节点将被从当前二分团中移除.此时, 该用户开始重新执行邻居节点发现过程.在图1中, 假设
本文定义可用控制信道的效用函数为
式中:
从式(9)可以看出, 控制信息平均传输时延近似为控制信息在指定信道上传输的控制开销.
用户
式中:
控制信息平均传输时延和控制信道吞吐量是决定控制信道质量的两个重要参数.因此, 本文将这两个参数结合起来构成控制信道效用函数, 其表达式如下:
式中:
从式(11)可以看出, 本文定义的信道效用函数
为了能在动态认知Ad Hoc网络环境中找到最优的信道效用函数
式中:
基于DPSO的最优控制信道选择过程如下:
(1)初始化:
(2)通过效用函数式(11)计算所有粒子值并得到初始优化效用值
(3)根据式(12)升级
(4)在第k次迭代中, 通过效用函数式(11)计算所有可用控制信道效用值, 对比当前可用控制信道效用值并更新
(5)如迭代收敛到某个最优值没有变化或迭代次数到达指定次数时, 算法停止, 输出最优信道索引值
鉴于认知Ad Hoc网络的动态特性, 主用户活动很可能占用当前公共控制信道.因此, 有必要讨论当主用户活动出现时, 公共控制信道的恢复策略.一旦当前公共控制信道被主用户占用, 次要节点
采用WINDOWS环境下的Matlab的8.1版本对所提出的基于邻居节点分组的公共控制信道分配算法的性能进行验证和分析.100个节点随机分布在
为了能够验证本文所提出的基于邻居节点分组的公共控制信道分配算法有效性, 与采用群智能的公共控制信道分配算法[8]和采用空间变化策略的公共控制信道分配算法[9]所得的结果进行比较.仿真中将主要关注采用不同的认知节点组数量, 可用控制信道数量和主用户数量对控制信道的归一化端对端时延, 吞吐量以及效用值等公共控制信道性能方面的影响情况.
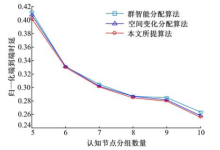
 | 图2 不同认知节点分组下归一化端到端时延比较Fig.2 Normalized end-to-end delay versus the number of groups in CRAHNs |
图2给出了节点分组数量对算法的性能的影响.从图2可以看出:当分组数量增加时, 相比于群智能控制信道分配算法和空间变化控制信道分配算法, 本文算法具有最小的归一化端到端时延.当分组数目较小时, 其所对应的可用控制信道集也较小, 容易受到主用户的影响, 因此3种算法平均端到端时延均相对较大.随着分组数量增多时, 可用控制信道也随之增多, 因此减少了主要用户活动对控制信道分配算法的影响, 因此取得了较小的归一化端到端时延.
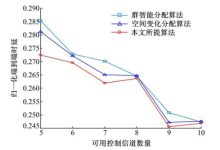
图3给出了不同算法间归一化端到端时延同可用控制信道数目的比较曲线.从图3可以看出:当可用控制信道数量增加时, 3种算法归一化端到端时延均减少.本文算法的性能要明显优于其他两种算法, 特别地, 本文算法的归一化端到端时延低于群智能分配算法达4%.这是因为本文所采取的最大边二分团策略使每个邻居用户分组都有对应的可用控制信道集, 保证了分组中认知用户能够选择出最优控制信道, 从而减少了归一化端到端时延; 而粒子群控制信道分配算法缺乏灵活的可用控制信道分集策略, 导致了较高的端到端时延.
 | 图3 不同可用信道数量下归一化端到端时延比较Fig.3 Normalized end-to-end delay versus the number of available channels |
 | 图4 不同算法在主用户数量变化下性能比较Fig.4 Expected metric values versus the number of PUs in CRAHNs |
图4给出了网络中主用户数量对算法性能的影响.从图4可以看出, 即使主用户增多导致认知节点通信受到限制, 信道质量下降的情况下, 本文算法也能保持一个相对较低的端到端时延和较高的控制信道效用函数值.相比之下, 空间变化分配算法由于依靠信道质量来进行控制信道分配, 当信道质量下降时对算法影响较为显著, 因此相比于本文算法有较大端到端时延和较低的效用函数值.而群智能分配算法由于对主用户数量变化较为敏感, 因此当前公共控制信道没有达到最大覆盖范围, 也未能使分组内认知用户数目最大化时, 无论在图4(a)还是在图4(b)中, 其端到端时延最大且效用函数值最低.
提出了一种基于邻居用户分组的公共控制信道分配算法.算法的主要思想是对认知Ad Hoc网络中的用户进行分组, 以简化网络拓扑复杂度.同时, 将邻居用户集合与其可用控制信道集的对应关系构造为最大边二分团问题, 从而保证了邻居用户内用户数目及对应的可用信道集之间较好的权衡.在所设定的仿真参数条件下, 对提出的算法进行了仿真分析和性能比较.仿真结果表明:提出的基于邻居用户分组的控制信道分配算法优于群智能控制信道分配算法和空间变化控制信道分配算法.同时, 该算法由于引入了DPSO优化算法寻找最优公共控制信道, 保证了认知Ad Hoc网络QoS, 具有一定的工程实用价值.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|