

{kind=link}
{kind=link}
{kind=link}
用于高动态噪声背景的归一化谱协作感知算法
[齐佩汉1  , 李赞
, 李赞1 , 司江勃1 , 高锐1 , 孙浩2 ]
, 李赞, 司江勃|
|


作者简介:齐佩汉(1986-),男,讲师,博士.研究方向:频谱感知与压缩感知.E-mail:phqi@xidian.edu.cn
针对背景噪声电平在多维域上的高动态变化严重影响协作感知算法的性能这一问题,本文提出基于归一化谱的协作感知算法.该算法利用认知用户归一化谱的等增益平均作为检验统计量,依据傅里叶变换的渐进正态性和相互独立性计算功率谱的统计特性,推导出算法虚警概率和判决门限的闭式表达式.仿真表明:归一化谱协作感知算法对噪声电平的动态变化具有鲁棒性;相对于基于能量的大数判决硬协作感知算法和等增益软协作感知算法,本文算法具有更广泛的适用性.
As high dynamic ranges of background noise level in time, spatial and frequency domain seriously affect the performance of cooperative spectrum sensing algorithms, a novel cooperative spectrum sensing algorithm based on Normalized Spectrum (NS) is proposed. The local NS is uploaded to the fusion center, and the equal gain average of NS is treated as detection statistics to detect signals in the fusion center. It makes use of asymptotic normality and independence of Fourier transform to get the stochastic properties of Power Spectral Density (PSD). The mathematical expression for probabilities of false alarm is derived. In accordance with the Neyman-Pearson criteria, the closed-form expression of decision threshold is calculated. The simulation results show that the NS algorithm is robust to dynamic ranges of background noise level. With respect to Majority Voting Hard Decision (MVHD) cooperative spectrum sensing algorithm and Equal Gain Soft Decision (EGSD) cooperative spectrum sensing algorithm based on energy, the NS algorithm has better performance and broader applications.
认知无线电[1](Cognitive radio)被认为是下一代蜂窝通信中解决频谱资源稀缺的重要途径之一.它包含了频谱感知, 动态频谱分配和无线频谱管理三大关键技术, 频谱感知是认知无线电动态闭环反馈系统运转的先决条件, 及时精准的频谱感知结果可为系统提供有益的反馈信息, 为有序动态的频谱分配和合理的频谱监管提供保障.协作频谱感知算法[2]融合不同位置节点提供的感知信息, 获得分集处理的增益, 可以有效克服多径衰落, 阴影效应和隐藏终端等问题对单点频谱感知算法性能的影响.
感知节点背景噪声是由地面噪声, 大气噪声, 降雨噪声, 人为噪声, 干扰噪声以及频谱感知接收机热噪声等多种噪声形式复合而成[3], 背景噪声电平往往在多维域上存在高动态变化的特点.固定测试频率和测试时间, 在不同测试地点得出的噪声电平最大值与最小值之间差值可达10 dBm以上[4]; 固定测试频率和测试地点, 在不同测试时间得出的噪声电平值之间存在6 dBm以上的动态变化范围[5]; 固定测试时间和测试地点, 在不同测试频率点上得出的噪声电平值也存在较大的动态变化范围[6].背景噪声电平在时域, 空域和频域上存在高动态变化的特点为经典的协作频谱感知算法带来巨大的挑战.经典的协作频谱感知算法大致可分为三类, 基于合并的协作频谱感知算法[7, 8], 基于审核的协作频谱感知算法[9, 10]和基于目标优化的协作频谱感知算法[11, 12, 13].这些协作频谱感知算法倾向于假设背景噪声电平稳定不变, 忽略了高动态变化背景噪声对算法性能的影响.基于合并的频谱感知算法又可分为硬合并和软合并方式.硬合并方式中, 参与协作的认知用户将本地判决结果通过报告信道发送到融合中心, 利用大数判决等准则判断有无主用户信号存在; 软合并方式中, 融合中心对来自不同认知用户的检测统计量进行加权合并后, 与相应的门限比较, 以确定主用户是否存在, 背景噪声电平不同时, 协作算法的性能取决于背景噪声电平高认知用户性能.基于审核的协作频谱感知算法依据认知用户接收信号信噪比, 置信度或者地理位置等审核指标, 对认知用户是否具备上传数据和参与协作的资格进行监管和审查, 达到减小通信开销和提升协作性能的目的, 然而这些审核指标的获取受背景噪声电平影响严重.基于目标优化的协作频谱感知算法往往以功率消耗, 感知覆盖范围, 感知性能以及通信吞吐量等指标作为最优化的目标, 进而设计合理的协作感知策略, 若考虑背景噪声电平的变化, 则为最优化问题增加了新的变元, 这使得问题的求解尤为复杂.
为应对背景噪声动态变化带来的新挑战, 本文给出一种归一化谱(Normalized spectrum, NS)协作频谱感知算法, 该算法无需主用户的先验信息, 具有适应背景噪声高动态变化的能力, 适用于高斯白噪声和平坦慢衰落信道, 可鲁棒运行于认知无线电网络中.
假设认知无线电网络采用中心融合架构, 参与协作的认知用户对同一频段进行感知, 并将感知信息上传至融合中心, 融合中心给出该频段是否被占用的感知结果, 认知无线电网络工作过程如图1所示, 虚线内为认知无线电网络的一个簇.
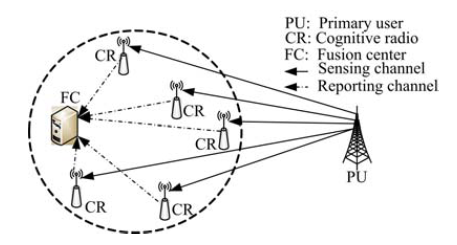 | 图1 认知无线电网络示意图Fig.1 Cognitive networks sketch map |
假设L个认知用户参与协作, 每个认知用户同时监测主用户可能出现的授权频段, 认知用户接收到的信号[14]可表示为:
式中:xl
(1)假设L个认知用户参与NS协作频谱感知, 每个认知接收机同步感知空间中的信号x
式中:k=0, 1, , et al., M-1; l=1, 2, , et al., L; M为每帧中的样本数.
(2)定义步骤(1)中认知用户得到的功率谱密度平均值为Sl
式中:M'/2为分段内谱线数.
定义分段谱线强度和与所有谱线强度和的比值为归一化谱, 每个认知用户的归一化谱可表示为:
式中:U=M/M'为分段数.
(3)认知用户将本地得到的一组归一化谱rl
并将归一化谱的平均值ravg
在H0假设下, 第l个认知用户采集到的离散样本xl(n), n=0, 1, , et al., M-1; l=1, 2, , et al., L服从均值为0, 方差为
傅里叶变换Xl
由于协方差是以Xl
第l个认知用户接收信号周期图功率谱估计值Sl
第l个认知用户一组归一化谱Xl/Yl构成新的随机变量, 其累积分布函数可表示为:
假设两簇认知用户分别进行NS协作频谱感知, 第Ⅰ 簇L个认知用户周围的噪声电平可以互不相同, 也可以部分相同, 还可以全部相同, 第Ⅱ 簇L个认知用户周围的噪声电平完全相同.两簇中每个认知用户分别执行帧长度为M, 分段数为U的NS算法.
分别计算出第Ⅰ 簇中L个认知用户的分段子带功率Sseg, l
再计算出第Ⅱ 簇中L个认知用户的分段子带功率S'seg, l
在式(12)(13)中, 每个归一化谱随机变量均服从由式(11)给出的分布, 该分布与参与协作节点的本地噪声方差无关, ravg, Ⅰ
L个认知用户归一化谱比值的平均值ravg
NS算法的虚警概率Pfa, NS由U组相同的归一化谱虚警概率Pfa按"或"规则组合得到:
依据Neyman-Pearson准则, 由预先设定的目标虚警概率Pfa, NS求出每一组归一化谱的虚警概率Pfa, 将Pfa代入式(14), 并令M=LM'可以得到NS算法的门限值γ 为:
式中:Φ
由式(16)可知:NS协作感知算法的门限值与参与运算的虚警概率Pfa, 分段数U, 帧长M以及协作节点数L有关, 与各认知用户噪声方差无关, 因此, NS协作感知算法门限值的确定与各认知用户噪声电平无关, 该协作算法在噪声电平高度变化的协作环境中可以更具鲁棒性.
为了方便后续章节采用恒虚警原则对不同协作频谱感知算法的性能进行对比和分析, 本节简要给出基于能量的大数判决硬协作(Majority voting hard decision, MVHD)频谱感知算法和基于能量的等增益软协作(Equal gain soft decision, EGSD)频谱感知算法的虚警概率和门限计算表达式.
在MVHD协作频谱感知算法中, 假设每个认知用户按照相同的虚警概率Pfa0进行单点判决, 则MVHD协作频谱感知算法的虚警概率Pfa, MVHD为:

式中:L为参与协作的认知用户节点数; 
若预先设定Pfa, MVHD, 则可以通过式(17)计算出单节点的虚警概率Pfa0, 然后利用下式:
可以计算出不同认知用户的判决门限, 其中,
在EGSD协作频谱感知算法中, 若参与EGSD协作的认知用户节点数为L, 每个认知用户本地运算的样本点数为M, 则EGSD协作频谱感知算法的检验统计量为L个高斯变量的等增益平均, 在H0假设下, EGSD协作算法的检验统计量服从
TEGSD(x)~N
结合虚警概率的定义, 可以得出EGSD协作频谱感知算法的虚警表达式:
采用恒虚警准则, 可以得出该算法在融合中心的判决门限:
依据第2节描述的系统模型采用Monte Carlo方法对NS算法在不同噪声电平下的感知性能和衰落信道中的协作感知性能进行仿真, 并将其协作感知性能与基于能量的硬协作感知和软协作感知算法性能进行对比.假设主用户发射数字BPSK调制信号, 信号码元速率sr为1000 kBaud, 载波频率fc为4250 kHz.认知用户未知主用户的调制类型和特征参数等先验信息, 只能确定主用户会在0~5000 kHz内出现, 因此, 以采样频率10 000 kHz对接收信号进行采样.假定噪声电平为n0, 则噪声功率为N=
假设在AWGN信道下, 单个认知用户节点对上文的主用户信号进行感知, 主用户的信噪比变化范围为-25~0 dB, 单个认知用户周围的噪声电平高动态变化, 在3个观测时刻背景噪声电平分别取-110, -120, 130 dBm/kHz.
图2仿真了单个认知用户在不同背景噪声电平环境下NS算法的正确检测概率, 仿真中两种算法使用的样本长度均为4000, 且设定NS算法节点数L=1, 每帧长度M=4000, 分段数U=4.由图可见, 在融合中心, 采用固定的判决门限, 门限由式(16)计算得出, 3种不同背景噪声电平对应的3条NS算法检测性能曲线基本重合, 说明NS算法在给定信噪比的情况下, 其判决门限和感知性能可以与噪声电平无关, 这与理论分析相符合, 因此, 该算法可被用于节点背景噪声电平不同的协作信号感知中.
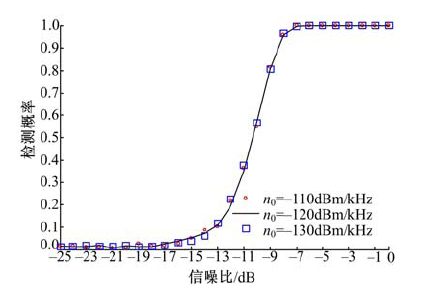 | 图2 背景噪声电平不同, 单节点NS感知性能Fig.2 Spectrum sensing performance of single user in different background noise level |
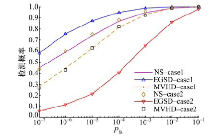
假设在Rayleigh信道下, L个认知用户节点对上文描述的主用户信号进行协作感知, 并且分别执行MVHD频谱感知算法, EGSD频谱感知算法和NS频谱感知算法, 对3种协作频谱感知算法进行性能对比.采用恒虚警准则, MVHD频谱感知算法本地判决门限由式(17)(18)计算得出, EGSD频谱感知算法的融合中心判决门限由式(21)计算得出, NS频谱感知算法在融合中心的判决门限由式(15)(16)计算得出; 仿真时, 3种协作算法使用的样本总长度均为12 000, 参与协作的认知用户数为L=3, 且设定每个认知用户使用样本数据长度M=4000, 分段数U=4.
条件① :3个参与协作的认知用户信噪比均为SNR=-10 dB, 背景噪声电平均为-110 dBm/kHz.条件② :3个参与协作的认知用户背景噪声电平分别为-110, -120, -130 dBm/kHz, 信噪比均为SNR=-10 dB.图3仿真了条件① 相同背景噪声电平下, 3个参与协作的认知用户具有相同信噪比时3种协作频谱感知算法的性能, 以及条件② 不同背景噪声电平下, 3个参与协作的认知用户具有相同信噪比时3种协作频谱感知算法的性能.由图3可知:条件① 下, NS协作频谱感知算法性能优于MVHD协作频谱感知算法, 但EGSD协作频谱感知算法的性能优于NS协作频谱感知算法; 在条件② 下, NS协作频谱感知算法性能优于EGSD协作频谱感知算法和MVHD协作频谱感知算法.这是由于参与协作的认知用户噪声方差不同, 信噪比相同时, 软协作算法的性能基本决定于噪声方差较大的认知用户单点感知性能.因此, 背景噪声的动态变化对EGSD协作频谱感知算法性能产生较大影响, 而NS协作频谱感知算法可以有效克服由不同认知用户背景噪声存在差异对感知性能带来的影响.
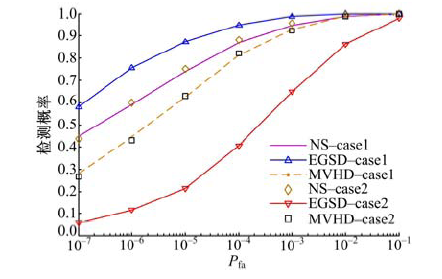 | 图3 协作性能对比图Fig.3 Cooperative spectrum sensing performance |
NS协作频谱感知算法的计算复杂度由各认知节点的本地归一化谱和融合中心的协作归一化谱两部分计算代价组成.每个认知用户计算一次本地归一化谱需要进行
归一化谱协作频谱感知算法可以有效应对背景噪声动态变化给协作频谱感知算法带来的新挑战.该算法的判决门限与参与运算的帧数, 分段内的谱线数以及虚警概率有关, 与噪声方差和噪声电平无关.该算法支持盲频谱感知, 无需主用户的先验信息, 具有适应背景噪声高动态变化的能力, 适用于加性高斯白噪声和平坦慢衰落信道模型, 因此, 归一化谱协作频谱感知算法可广泛应用于复杂电磁环境下的认知无线电网络.
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|