{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
气压电控制动系统仿真平台及补偿控制策略开发
[宗长富1  , 万滢
, 万滢1 , 赵伟强1 , 张不扬1 , 韩正铁2 ]
, 万滢|
|


作者简介:宗长富(1962-),男,教授,博士生导师.研究方向:汽车仿真与控制研究.E-mail:378811297@qq.com
为改善比例继动阀的工作特性和整车制动性能,建立并验证了包含电控制动系统EBS部件、能够反映EBS制动系统性能的Simulink & AMESim联合仿真商用车整车动力学仿真平台;根据仿真分析和试验测试结果提出了逆滞环前馈补偿和PID压力闭环相结合的比例继动阀迟滞补偿压力控制策略;最后,基于所开发的AMESim比例继动阀仿真模型、硬件在环试验台和EBS整车仿真平台对本文控制策略进行了验证。结果表明,本文的压力控制策略使比例继动阀的压力响应提前76%,基本消除了静态迟滞特性,同时使制动距离减小2.8%。
To eliminate the hysteresis characteristics of proportional relay valve and its influence on heavy vehicle braking performance, the response time and hysteresis characteristics of the proportional valves were tested. A vehicle dynamic simulation platform was developed using MATLAB/Simulink and AMESim for the purpose of Electric Braking System (EBS) control strategy development and braking performance analysis. The platform consists of pneumatic EBS components and it can reflect the EBS performance. A hysteresis compensation method, which integrates PID closed loop control and the feedforward compensation control, was proposed for mitigating the hysteresis characteristics of the proportional relay valve. Experiments were conducted on the simulation platform to evaluate the effect of the control strategy on the valve characteristics and vehicle braking performance. Results show that using the proposed pressure control strategy the pressure response of the proportional relay valve is advanced by 76% and the static hysteresis is almost eliminated. Meanwhile, the braking distance is reduced by 2.8%.
商用车电控制动系统(EBS)解决了传统气压制动系统气路过长导致的响应延迟, 但其气压EBS系统的部件具有迟滞特性, 是商用车EBS系统性能提升的瓶颈。比例继动阀是气压EBS系统最复杂、核心的部件, 对气压EBS系统商用车的制动性能影响很大, 而比例继动阀就具有明显的迟滞特性。但目前大多研究是针对EBS系统的制动控制策略[1, 2]。因此, 对EBS制动系统, 尤其是其中的比例继动阀的气压响应延迟和迟滞特性进行研究, 对提升商用车EBS系统的性能具有重要意义。
目前国内外对气压制动系统的时延和迟滞特性的研究主要集中在以下方面:①建立气压制动系统的迟滞模型, 分析系统迟滞特性对整车动力学响应和控制精度的影响[3, 4]。②开发各种控制算法控制系统的执行元件, 以降低系统迟滞特性对整车动力学特性的影响[5, 6, 7]。大部分研究都针对传统气压制动系统[8], 针对EBS系统迟滞特性研究的科研成果并不多见。即使有针对比例继动阀迟滞特性的压力闭环控制方法, 也缺乏对整个EBS系统特性及整车动力学性能的影响分析和控制效果的验证。
为此, 本文进行了以下工作:①开环测试了比例继动阀的动、静态特性; ②搭建并验证了能够反映EBS制动系统迟滞和延迟特性的EBS商用车整车动力学仿真平台; ③提出了迟滞补偿压力控制方法, 消除比例继动阀的迟滞特性, 并提高前轮的压力响应特性; ④利用比例继动阀试验台和整车仿真平台, 验证了本文控制策略对提高比例继动阀特性和整车制动性能的效果。
比例继动阀用于输出前桥制动压力, 由比例电磁阀、继动阀和压力传感器组成。正常状态下, 中央ECU对比例继动阀的电控回路进行控制, 输出压力与输入的控制电流成比例。在实际工况中, 由于增、减压过程的气体通道不同、电磁阀阀芯运动的摩擦力方向相反等原因, 比例继动阀在增、减压过程中的输出信号是两个不同的数值, 即具有迟滞特性。
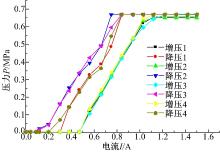
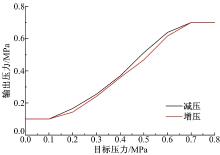
为保证阀体能准确响应, 需要对比例继动阀的压力响应和静态特性进行测试。比例继动阀静态特性测试结果如图1所示。
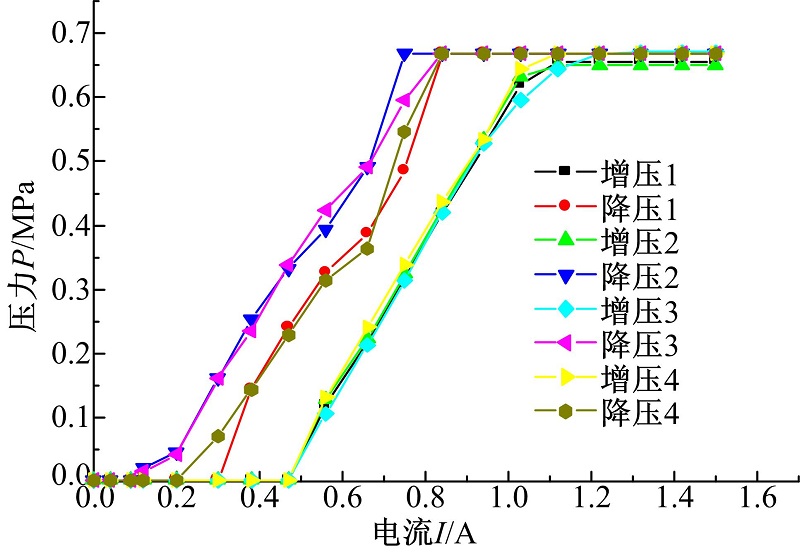 | 图1 比例继动阀的迟滞特性测试Fig.1 Test results of the hysteresis characteristic |
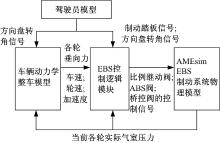
为分析比例继动阀的特性及其对整车制动性能的影响, 同时又能快速开发和验证控制策略, 本文搭建了能够反映气压EBS系统的延迟和迟滞特性的整车仿真平台。该平台包括:驾驶员模型, 车辆动力学模型, EBS控制模块, EBS系统模型。整车仿真平台架构如图2所示。
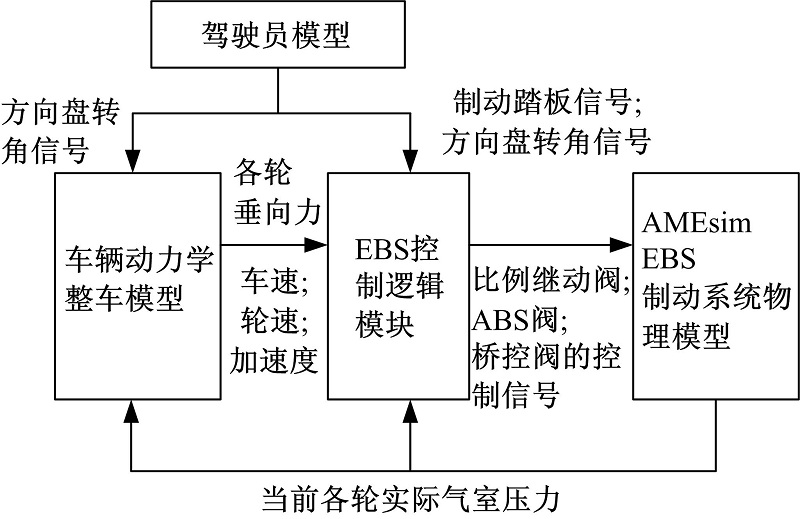 | 图2 整车仿真平台总体框架Fig.2 The overall structure of the simulation platform |
在Simulink环境下建立整车动力学模型, 在AMESim环境下建立EBS系统模型, 利用Simulink to AMESim的标准模式进行联合仿真, 兼顾Simulink运行快速、控制模型精度高, 而AMESim的包括阀体和管路在内的制动系统模型精确、丰富的特点, 建立了可信度和精确度高的仿真平台[9]。
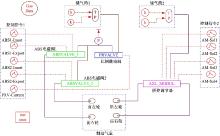
本文研究的商用车气压EBS系统模型是单车模型, 包括比例继动阀、2个ABS电磁阀、桥控阀、各种管路、压力传感器、气源和4个制动气室。管路中不包含备压气路和备压阀, 不包括制动器模型。图3为整个EBS系统的AMESim模型。
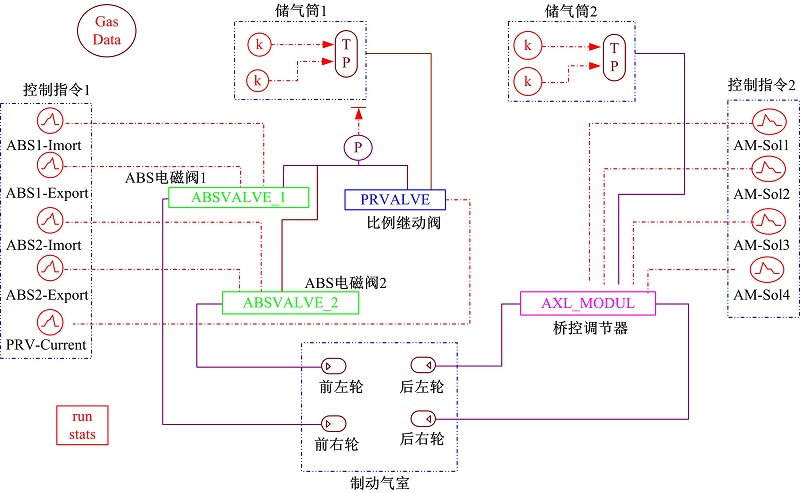 | 图3 EBS系统AMESim模型Fig.3 The EBS model in AMESim |
模型大部分参数通过某公司产品参考确定, 有些参数通过其他文献和实验测量获得, 而库仑摩擦力、粘滞摩擦力等高度不确定性的参数则估计确定。气源压力和气温、大气压力为初始条件和边界条件。
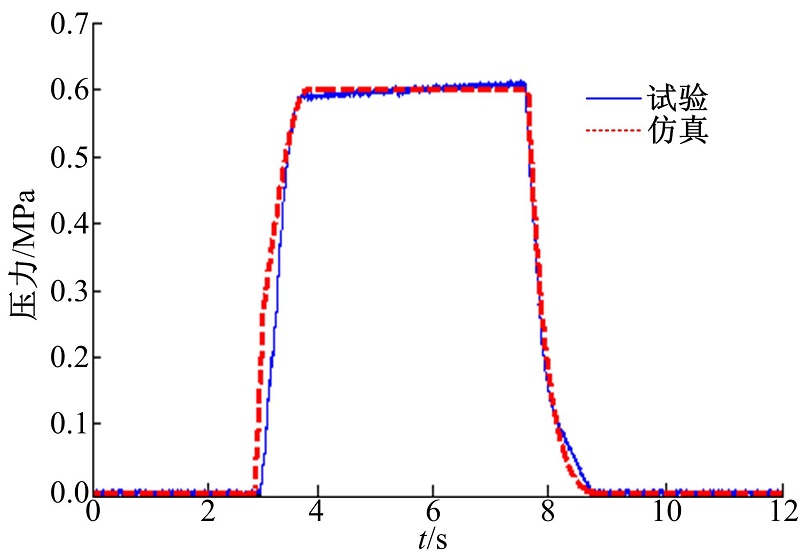
(1)比例继动阀的验证
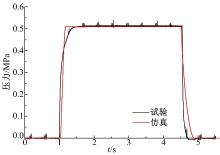
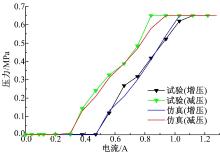
图4和图5分别为比例继动阀压力响应特性和静态滞环特性的仿真和测试结果对比, 可知测试与仿真结果总体一致, 本文仿真模型是合理的。
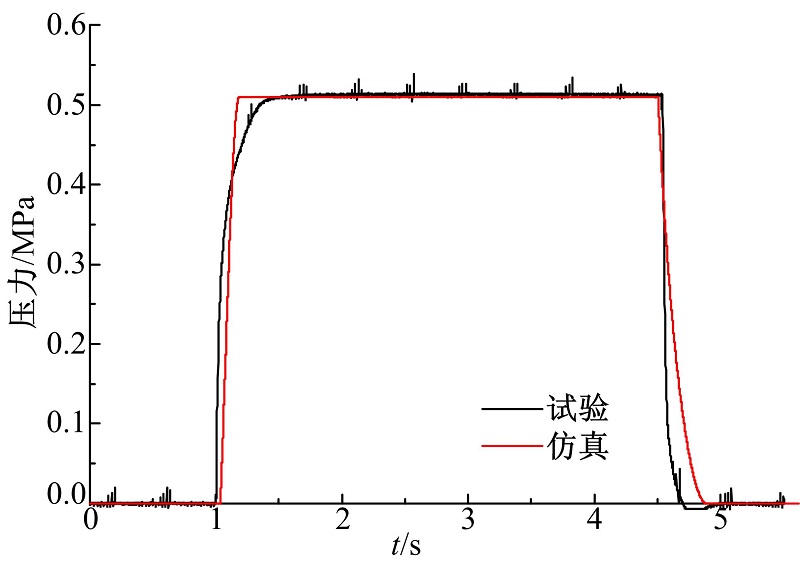 | 图4 比例继动阀压力响应特性Fig.4 Test and simulation results of the pressure response of the proportional relay valve |
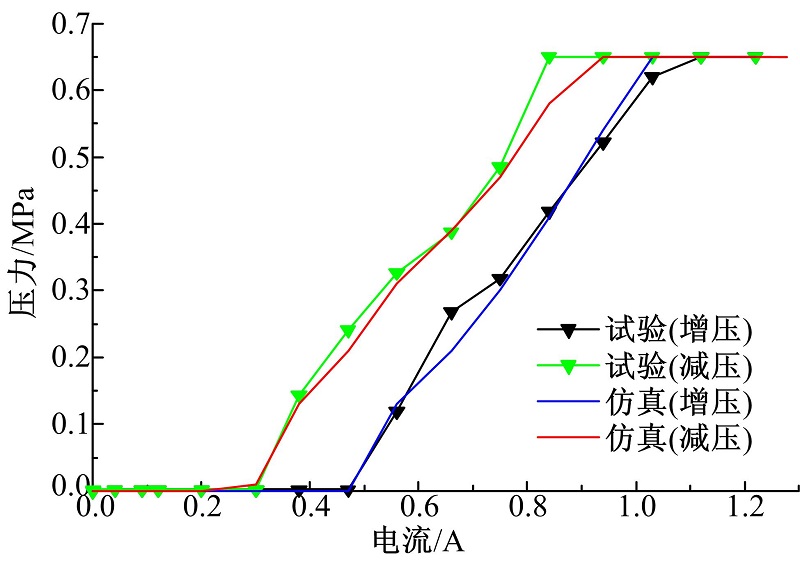 | 图5 比例继动阀静态迟滞特性Fig.5 Test and simulation results of hysteresis characteristic |
(2)桥控阀和ABS阀的验证
图6所示为桥控阀开环响应特性的仿真和测试结果对比。由图可知, 桥控阀仿真模型合理。
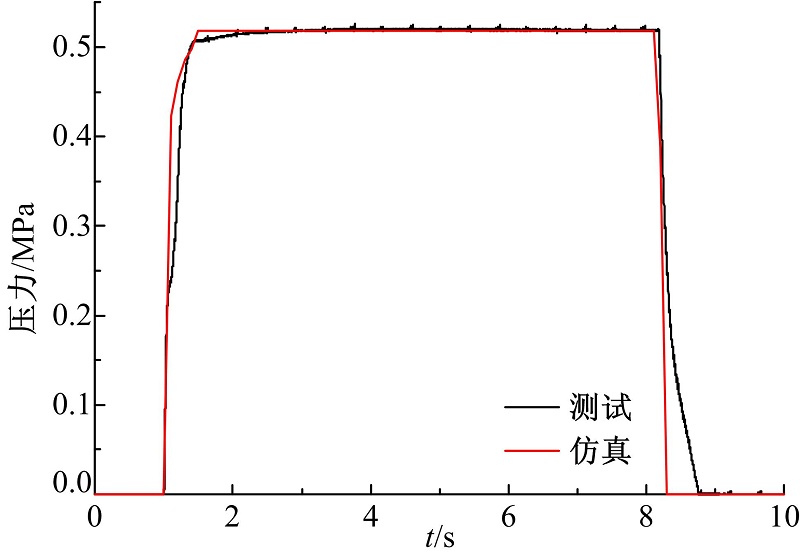 | 图6 桥控阀压力响应特性Fig.6 Test and simulation results of the bridge control valve |
图7所示为ABS阀压力响应的试验与仿真结果对比, 由图可以看出, ABS阀仿真模型合理。
 | 图7 ABS阀响应特性Fig.7 Test and simulation pressure response of the ABS valve |
(1)车体动力学模型
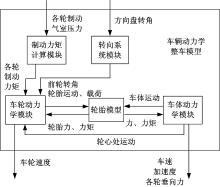
车体模型的作用是根据驾驶员的当前操作和实际车轮制动气室压力计算当前车辆运动状态。本文模型的模块构成如图8所示, 忽略了空气的影响, 认为路面平直, 附着系数为常数。各轮制动力矩由EBS系统输出的实际气室压力求解。
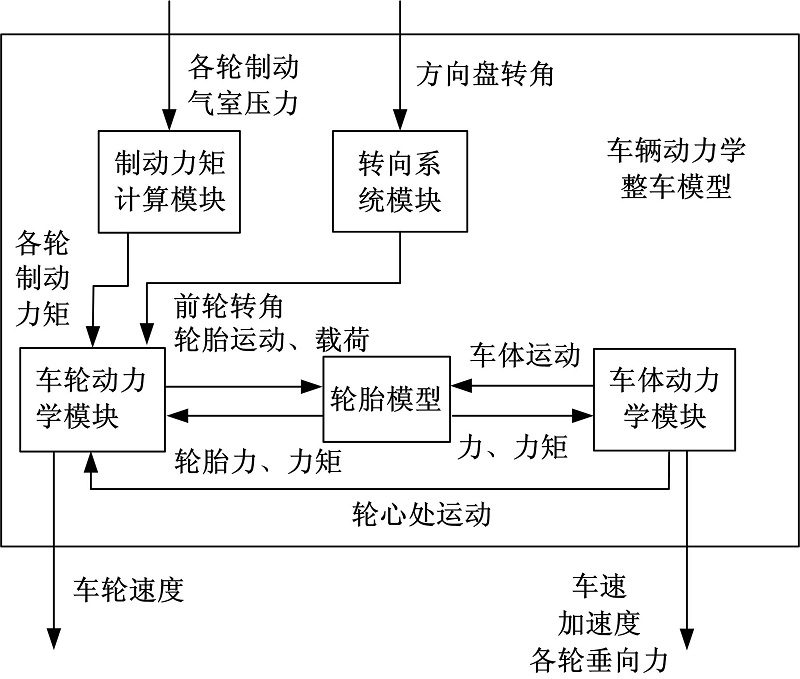 | 图8 车辆动力学整车模型功能框图Fig.8 The functional blocks of the vehicle dynamics model |
(2)车辆动力学模型的验证
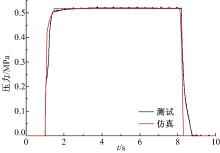
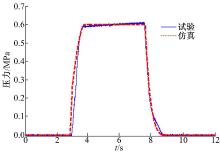
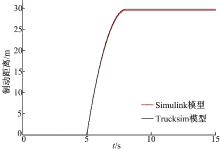
为保证车辆动力学模型的准确性, 保证其能够很好地表征车辆的状态, 本文采用Trucksim验证所建模型, 选择了70 km/h, 制动踏板75%开度的直线制动实验作为验证工况。由图9和图10可以看出, 本文建立的车辆动力学模型有效可行, 满足要求。
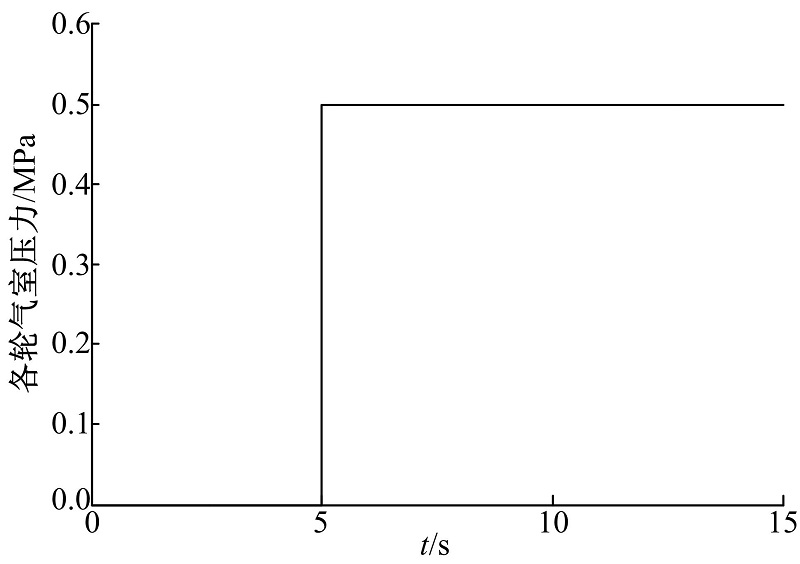 | 图9 气室压力Fig.9 Brake chamber pressure |
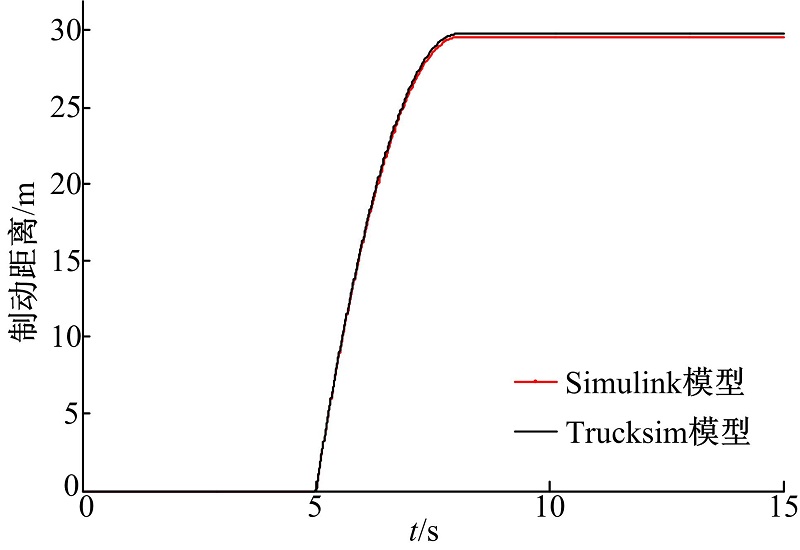 | 图10 制动距离Fig.10 Braking distance |
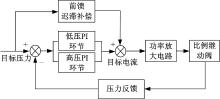
根据比例继动阀的内部结构和特性测试结果, 发现比例继动阀具有明显的动态延迟和静态滞环特性, 采用传统的PID控制方法难以取得满意的效果, 根据过程控制原理, 采用逆滞环补偿可有效改善系统的滞环特性。因此, 本文采用前馈补偿结合PID控制的方法进行比例继动阀的控制[10], 一方面前馈补偿环节可加快达到目标压力的速度并消除静态滞环现象, 而PID调节可以使实际压力稳定在目标压力附近。
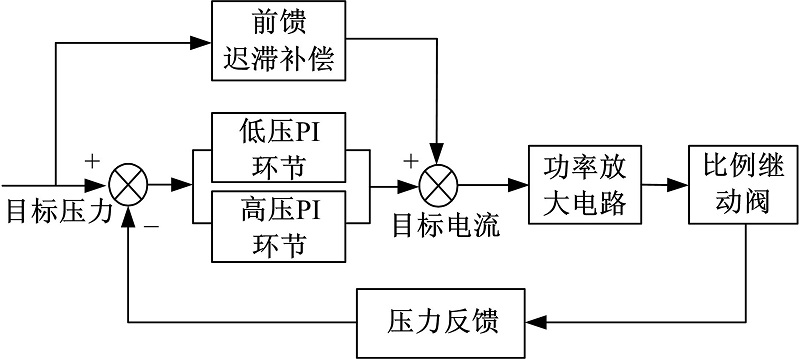 | 图11 前馈补偿PID控制框图Fig.11 The frame of the feed forward & PID control logic |
整体控制框图如图11所示, 输出电流的大小由前馈补偿环节与PID环节共同决定, 前馈补偿环节根据目标压力的增、减趋势和大小确定电流的PWM占空比初值, 而PID环节负责对信号进行压力闭环调节以使系统响应接近目标压力。
前馈补偿控制要点包括以下两点:
(1)减小因初始间隙而导致的时延和震荡:即在制动初期先施加足以消除初始间隙的电流。
(2)采用逆滞环前馈补偿来补偿滞环特性:根据目标压力的变化趋势, 选择用升压曲线还是降压曲线计算输出电流。
具体地, 首先对比例继动阀特性测试得到的静态特性曲线(图5)进行线性化处理, 得到线性化的压力-电流静态曲线表达式如下:
升压:
降压:
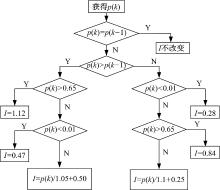
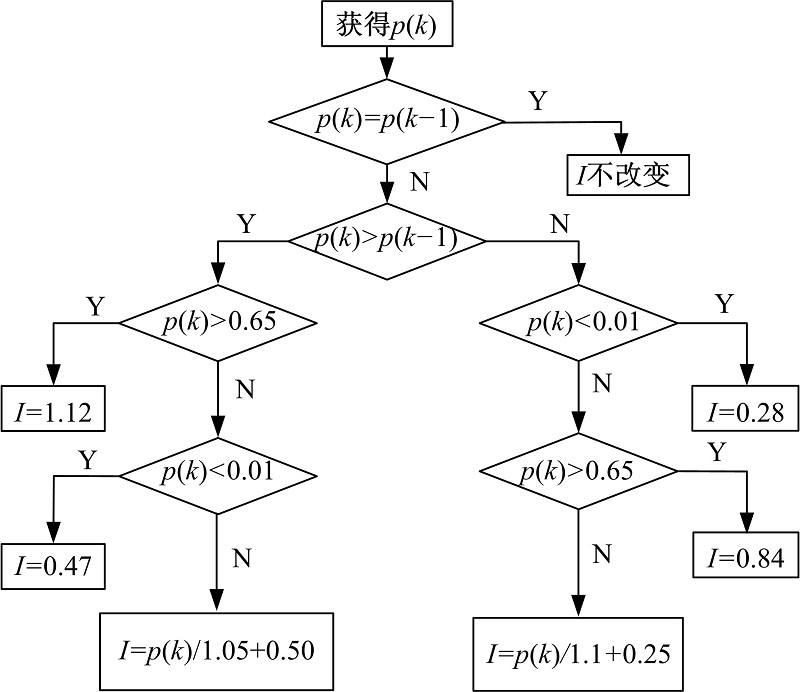 | 图12 前馈补偿环节的流程图Fig.12 Flow chart of the feed forward compensation algorithm |
基于升压/降压压力-电流曲线和能够消除初始间隙的最小电流进行前馈补偿控制:若目标压力大于最大值(0.65 MPa), 增压时电流取1.12 A, 减压取0.84 A; 若目标压力小于指定值(0.01 MPa), 增压时电流取0.47 A, 减压时取0.28 A; 若目标压力在最大值与最小值之间, 根据目标压力是增压过程还是减压过程来选择升压/降压曲线计算电流值。前馈补偿环节的程序流程图如图12所示。其中,p(k)为k时刻的目标压力,p(k-1)为前一时刻的目标压力,I为输出电流。
采用压力控制稳定性、压力上升时间、超调量、压力稳定化时间等作为评价指标, 确定合理的PID参数。仿真表明能够满足全压力范围的PID参数不存在, 因此采用参数切换PID控制方法:
目标压力0~0.3 MPa:
目标压力0.3~0.7 MPa:
平均压力稳定时间、压力上升时间、超调分别是:
0~0.3 MPa:0.4 s、0.015 s、34.6%;
0.3~0.7 MPa:0.28 s、0.184 s、8.5%。
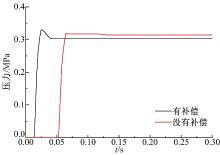
图13为有前馈补偿PID控制的比例继动阀目标压力-输出压力关系, 补偿后增、减压特性基本重合, 且曲线斜率接近1, 说明阀的大部分迟滞得到有效补偿。图14为目标压力0.3 MPa时有、无迟滞补偿控制的比例继动阀动态压力响应, 可以看出, 有补偿控制比无补偿的响应时间提前了近0.03 s。
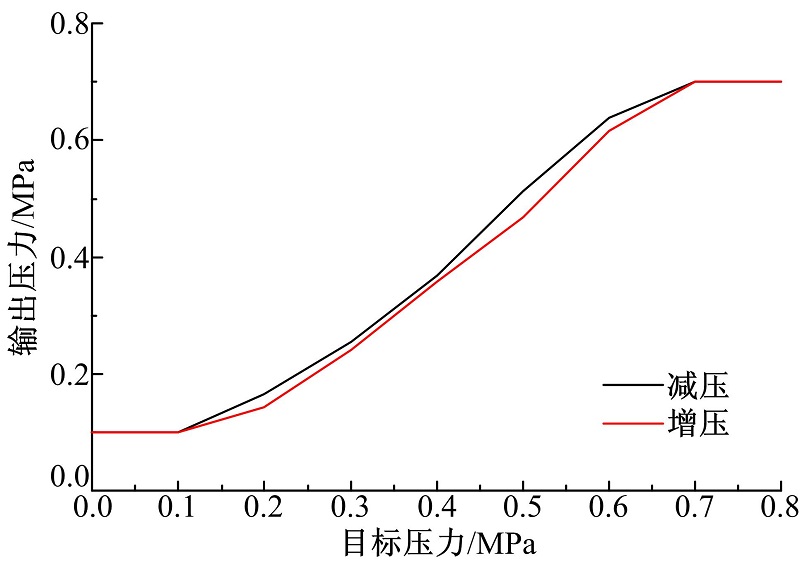 | 图13 补偿后的输入输出关系Fig.13 Target pressure-controlled actual pressure curve |
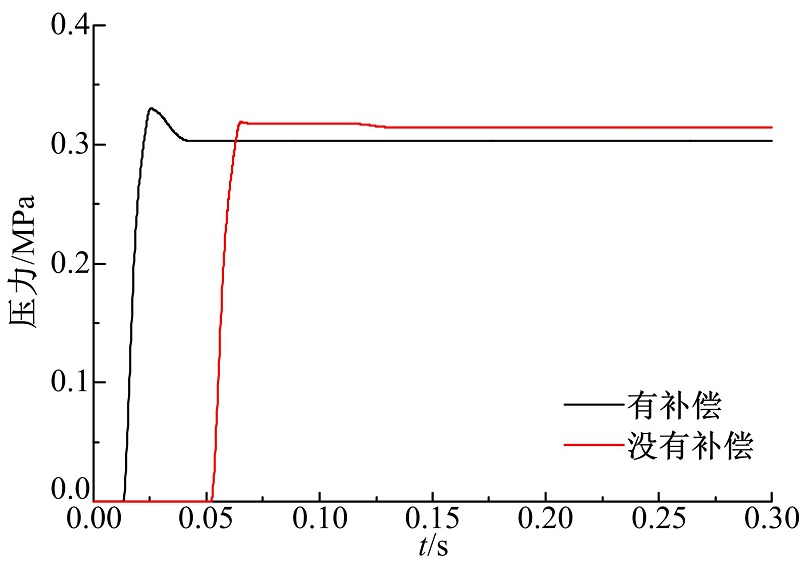 | 图14 比例继动阀动态响应离线仿真结果Fig.14 Controlled pressure response time history |
测试时, 主机给出目标制动气室压力, 比例继动阀的前馈闭环控制策略会根据目标值控制底层阀体的动作, 气室压力传感器会实时测量当前的压力, 同时反馈给控制器及采集系统。根据返回的目标压力及实际气室压力, 就可以得到压力响应时间。
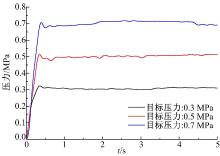
图15为前馈PID控制下, 比例继动阀对不同目标压力响应时间的测试结果。试验选定低、中、高3种不同目标压力:0.3 MPa、0.5 MPa和0.7 MPa。由图可知, 在低、中、高3个目标压力下, 实际压力达到目标压力75%的时间分别为:0.153 s、0.227 s、0.259 s, 完全满足比例继动阀前馈PID闭环控制的要求, 说明所选择的PID参数是适用的。
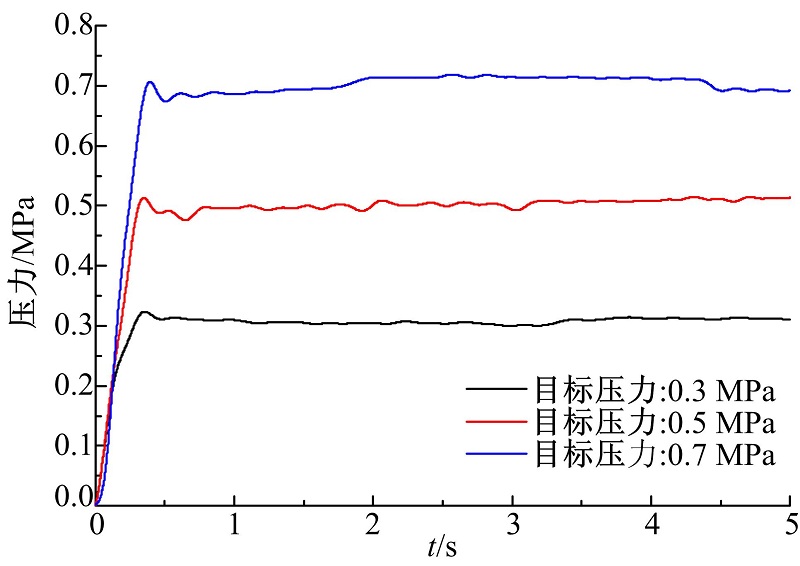 | 图15 比例继动阀有闭环控制的压力响应Fig.15 Controlled pressure response— test results |
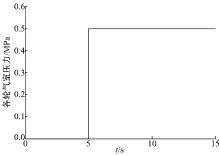
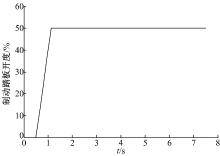
考虑到比例继动阀主要作用是分配前轴制动压力, 在车轮不抱死的时候作用最大, 而当车轮抱死时主要依靠ABS阀控制, 因此本文采用高附着系数0.77的路面, 常规直线制动工况考察迟滞补偿控制对整车主要制动性能— — 制动距离的影响, 初始车速为70 km/h, 踏板开度如图16所示。对比分析有、无补偿控制模块时车辆前轮气室压力的响应和制动距离, 验证本文控制策略对整车制动性能的影响。
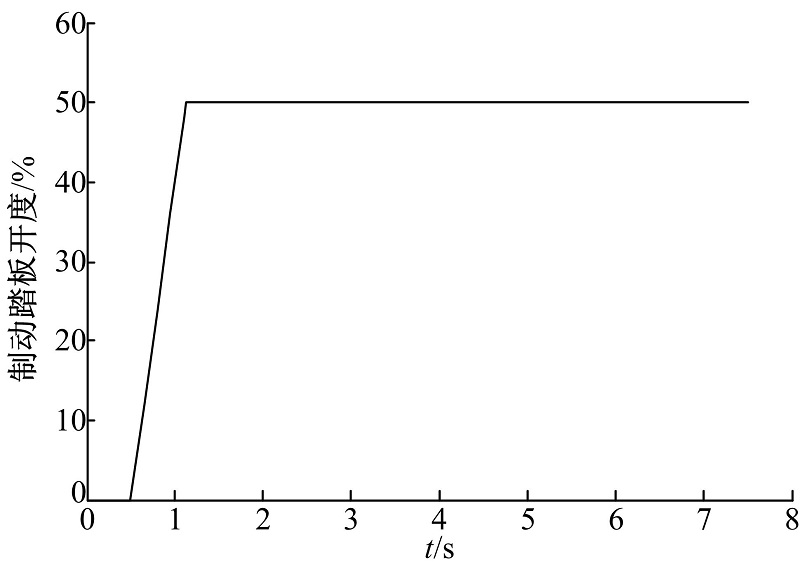 | 图16 常规制动制动踏板开度曲线Fig.16 Braking pedal aperture |
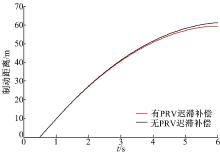
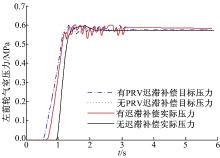
图17为有、无迟滞补偿控制时, 车辆制动距离的对比; 图18为有、无迟滞补偿控制时, 制动气室压力的对比。由图可知:加入比例继动阀的迟滞补偿控制模块后制动距离缩短了1.65 m, 百分比为2.8%; 由于比例继动阀存在滞环特性, 实际气室压力建立时存在一定的滞后, 但比例继动阀迟滞补偿控制可以很大程度上改善这种滞后现象, 图中比例继动阀的迟滞补偿能够使压力响应时间减少76%。
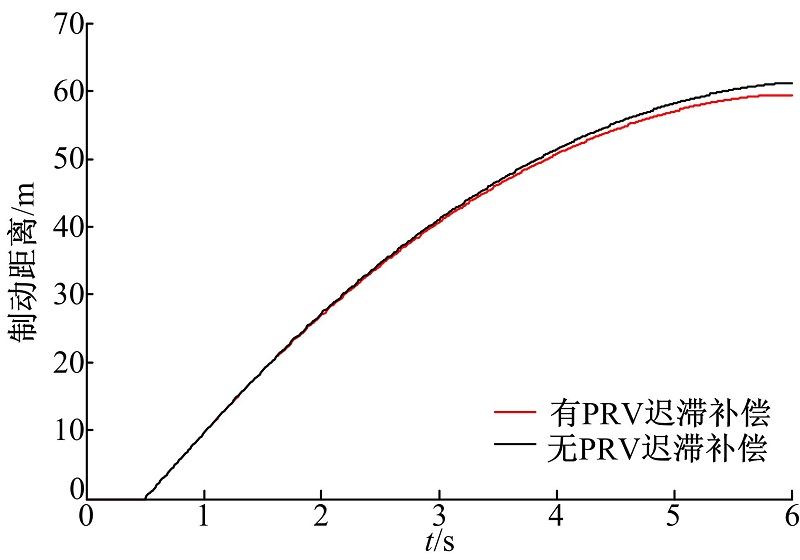 | 图17 有、无迟滞补偿的制动距离对比Fig.17 Comparison of the braking distance |
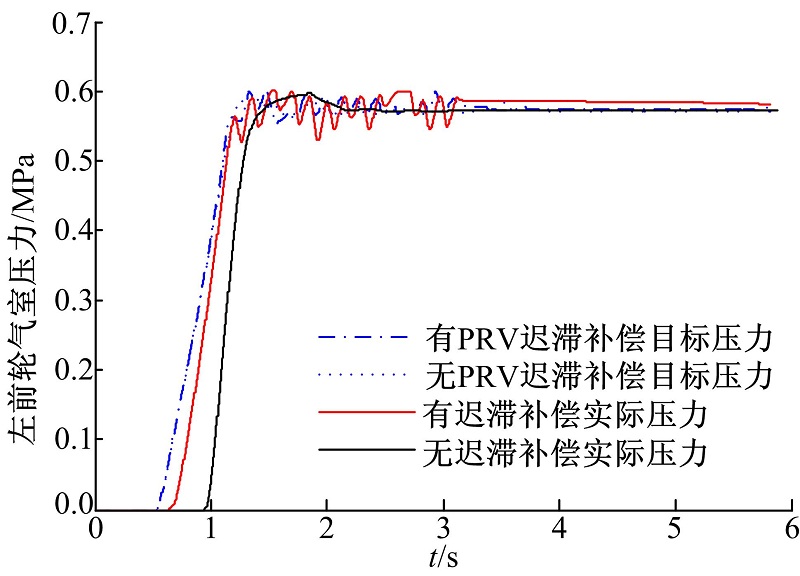 | 图18 有、无迟滞补偿的制动气室压力对比Fig.18 Comparison of the brake chamber pressure |
(1)对比例继动阀的动、静态特性进行了开环测试和分析; 基于Simulink-AMESim标准接口, 开发并验证了带有EBS系统、能够反映EBS系统时延和迟滞特性的商用车整车动力学仿真平台。
(2)采用逆滞环前馈补偿结合PID闭环压力控制的方式对比例继动阀进行压力补偿控制。
(3)利用比例继动阀的仿真模型、试验台和EBS整车仿真平台, 验证了本文比例继动阀迟滞补偿控制策略对比例继动阀工作性能和整车制动性能的影响, 结果表明控制策略有效可行。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|