







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
换道过程中越线时刻预测模型
[王畅 , 杜康, 郑楚清]
, 杜康, 郑楚清]
, 杜康, 郑楚清]
|
|


作者简介:王畅(1984-),男,副教授,博士.研究方向:车辆主动安全技术.E-mail:wangchang@chd.edu.cn
分析了车辆换道过程中的运动几何特征,提出了车辆相对于车道线的偏航角度估算方法。在此基础上,分别建立了直道路段和弯道路段的越线时刻预测模型。利用视觉传感器、车载陀螺仪、车载CAN总线数据采集卡设计开发了测试平台,对多名被测试人员进行了驾驶测试,获取了大量的换道状态表征数据。利用实测换道数据对越线时刻预测模型进行验证,结果表明,直道路段预测结果中87.0%的误差绝对值小于等于0.1 s,弯道路段相应的比例达到了93.7%,且两类模型的预测误差值均符合正态分布规律。
To solve the time-to-line-crossing (TLC) prediction problem during lane change process, the geometrical motion feature of vehicle during lane change was analyzed and a yaw angle estimation algorithm between vehicle and lane mark was proposed. Based on this, TLC prediction models for straight and curve roads were established. A test platform was developed which consists of vision sensor, vehicle gyro and onboard CAN bus data capture card. Real-road driving test of several drivers was carried out, and representative data of lane change state were collected. The TLC prediction models were tested using the real lane change data. Results show that 87.0% prediction errors on straight road were less than or equal 0.1 s, and the corresponding rate on curve road was 93.7%. The prediction errors of two models meet the normal distribution.
换道预警系统能够自动分析车辆换道过程中与后方其他车辆发生冲突的可能性, 并根据冲突严重等级对驾驶员进行提示。从本质而言, 车辆间发生交通冲突的原因在于不同的车辆在相同的时间内达到了同一地点, 因此, 分析交通冲突时需要考虑两个因素:①从什么时间开始可能会存在冲突; ②在可能冲突的时间段内车辆是否会到达相同位置。分析车辆换道过程中的运动状态可知, 对时间序列而言, 换道过程中车辆越过车道线的时刻是引发交通冲突的开始点。因此, 如果能够准确地预测越线时刻(Time to line crossing, TLC), 则可以根据传感器所返回的车辆间相对距离、相对角度等参数来实时分析换道过程的风险性[1]。对车辆运动过程而言, TLC的实际意义是从当前时刻开始, 车辆经过一定时间后将压到车道线, 这个时间值即为TLC。
车辆实际换道过程表明, 越线时刻与换道过程中的方向盘转角、车速、道路曲率、车辆与车道线间的距离等参数密切相关[2, 3]。van Winsum等[4, 5]基于换道过程中的横向位移来近似地计算TLC值, 其假设换道过程中车辆的横向速度值保持不变, 这种方法会使得TLC值较小时容易被高估。Tideman[6]基于两种假设:①假设车辆保持当前航向; ②假设驾驶员保持当前方向盘转角不变, 然后通过几何公式对TLC值进行预测。Eidehall[7]根据横向位移和横向速度对车辆的越线时间进行预测。一些研究人员提出利用换道轨迹对越线时刻进行预测, 但换道轨迹受到较多因素的影响。部分研究将换道过程中的横向加速度设定为满足正弦状分布, 由此通过积分原理来描述车辆在横向上的运动规律[8, 9]。但从实际换道过程中采集得到的横向加速度分布表明, 正常换道过程中, 横向加速度的变化范围较小, 而这个范围通常与横向加速度的漂移区间相重合, 因而从加速度信号中分离出由换道行为引发的横向加速度是一个较为复杂的问题。
总体而言, 目前与TLC相关的预测算法并不多见, 研究人员所提出的一些模型尽管具有较好的理论深度, 但这些模型中涉及参数较多, 而车辆在实际道路行驶过程中这些参数的获取本身就较为复杂, 从而使得这类模型无法得到较好的应用。TLC产生的机理在于车辆相对于车道线的距离变化, 因此, 如果对该参数的变化规律进行分析, 从几何角度而言可以实现对TLC值的预测。针对这种情况, 本文通过进行实际道路真实换道试验, 基于视觉传感器测量得到车辆与车道线的距离数据, 获取换道过程中车辆的运动状态表征数据, 并基于这些数据建立TLC预测模型, 实现对换道过程中TLC值的在线实时预测。
驾驶员转动方向盘之后, 车辆将相对于车道线发生横向位移, 将车辆开始发生横向运动的时刻定义为换道开始时刻。从当前时刻起经过一定时间车辆将越过车道线而进入到目标车道, 这个时间被定义为TLC。车辆换道过程中, 大多数研究人员将其轨迹理解为圆弧, 这与车辆在道路上的实际行驶情况比较贴切。从这个角度出发, 本文提出一种基于几何参数分析建模的TLC预测方法, 分别实现车辆在直道路段和弯道路段换道过程中的TLC预测, 具体建模过程如下所示。
以换道方向为依据, 可以将换道过程分为向左换道和向右换道。以向左换道为例对直道路段TLC的预测方法描述如下。
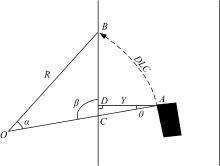
图1为直道路段向左换道示意图。图1中, DLC为沿着车辆轨迹到达车道边线的曲线弧段; R为在换道过程中车辆以点O为圆心作圆周运动的半径; α 为在换道的某一时刻动态位置A点和车道线定点B点这两点到圆心O的夹角; β 为动态点A到圆心O点的连线与所要越过的车道线的夹角; θ 为动态点A至所要越过车道线的垂线(即横向位移Y)与动态点A至圆心O连线的夹角。
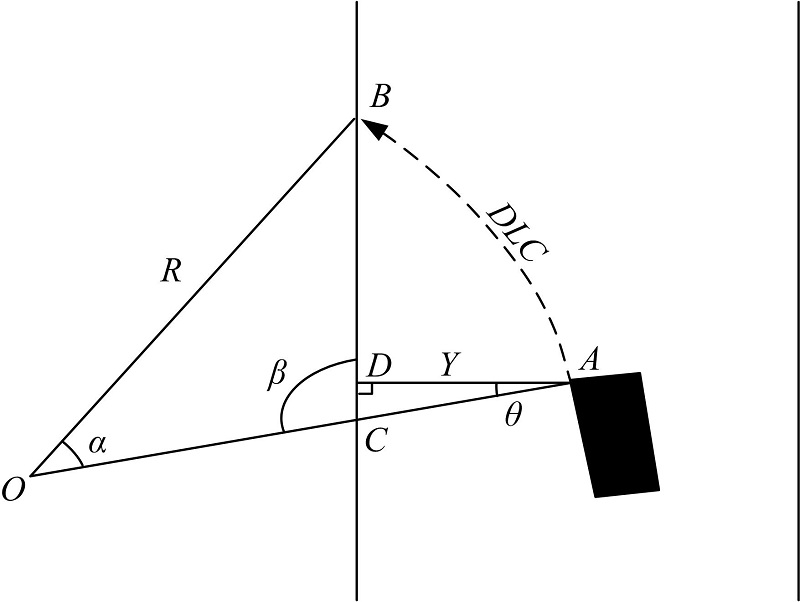 | 图1 直道路段向左换道Fig.1 Lane change to left in straight road |
由图1可知, 对TLC的预测实际上是预测车辆在曲线弧段DLC沿着换道轨迹到达越过车道线的时间。假定车辆在换道过程中的车速为u, 则TLC的计算方法如下:
在以半径为R的圆弧轨迹中, 曲线弧段DLC长度的计算公式为:
车辆以半径R作圆周运动, 则半径R的计算公式为:
式中:
图1中, 由几何关系可得:
由此可得:
同理可得:
联立求解式(1)(2)(3)(6)可得:
式(7)即为车辆在换道过程中TLC预测模型。对于每一个采样时刻, 车辆所在位置点A与车道线之间的距离Y值可由传感器测量得到。同时, 车辆的速度与横摆角速度值也可由车载陀螺仪测量得到。参考图1, 分析TLC的计算模型可知, 如果已知角度θ , 则能够实现TLC的预测计算。角度θ 反映车辆相对于车道线的偏航行为, 本文中, 考虑车辆的行驶特性和数据采集特性, 提出一种角度θ 的近似估计算法, 过程如图2所示。
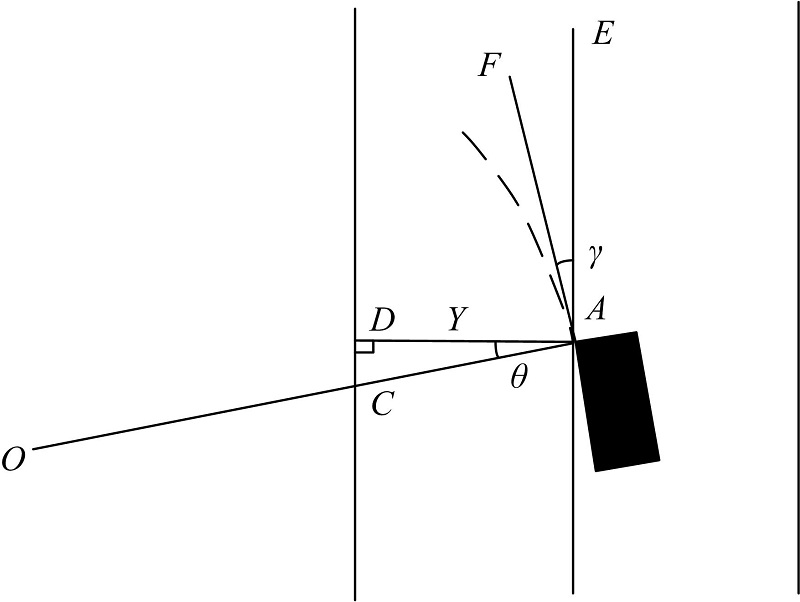 | 图2 角度θ 的估计Fig.2 Estimation of angle θ |
图2中, 在当前时刻, 车辆处于A点, 此时从A点引出车辆行驶轨迹的切线AF, 则角度γ 为车辆行驶轨迹与车道线之间的夹角, 由此可以将角度θ 的估计问题转换为角度γ 的估计。分析车辆换道过程, 车辆在某一时刻的运动状态是由车辆在这个时刻之前的运动状态所决定的。参考此道理, 如果已知某个时刻之前车辆的运动特征, 例如, 对于图2中车辆到达A点的时刻, 在此之前车辆与车道线之间的距离数据是被持续监测的, 因此, 通过分析在时刻A点之前的横向运动规律, 可以近似地对角度θ 进行估计, 步骤如下:
(1)分析A点时刻之前t0时间段内车辆在横向方向上所发生的位移。换道行为隶属于一个时间段的行为, 因此, 换道预警系统首先需要对车辆是否发生换道行为进行识别。Mandalia的研究结论表明, 通过使用方向盘转角或车道线距离参数, 在0.8~1.2 s的识别时窗情况下可以达到90%以上的识别率[10]。只有在识别出车辆已经发生换道的情况下, 对TLC进行计算才有意义。由此可知, 对于换道过程中的任意时刻点A, 此时刻之前t0时间段内车辆的运动特征是已知的, 由此, 取t0=0.8 s, 计算车辆在t0 时间段内所发生的相对横向位移L0 。由车辆与车道线之间的距离数据, 可以计算得到L0 。
(2)估算角度γ 。对于时刻点A, 计算车辆在t0 时间段内行驶轨迹的长度D0 。
则角度
上述模型推导过程中, 车速
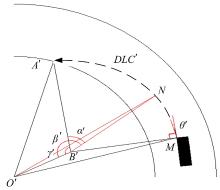
弯道路段分为向左转弯和向右转弯, 同时在向左转弯的道路上也存在向左换道和向右换道两种情况, 因此, 弯道路段车辆发生换道时共存在4种情况。以向左转弯道路上发生向左换道为例, 弯道路段TLC的预测模型建立过程如图3所示。
 | 图3 弯道路段向左换道Fig.3 Lane change to left in curve road |
图3中, DLC'为沿着车辆轨迹到达车道边线的曲线弧段; |A'B'|为在换道过程中车辆以B'点为圆心作圆周运动的半径; |A'O'|为弯道道路的曲率半径; α '为在换道的某一时刻动态M点和车道线定点A点这两点到圆心B'的夹角; β '为动态点N到B'点的连线与连线|B'O'|的夹角; θ '为车辆在换道过程中的偏航角。
假定车辆在换道过程中的车速为
在以半径为Rv 的圆弧轨迹中, 曲线弧段DLC'长度的计算公式为:
图3中, 有:
车辆以半径Rv (Rv=|MB'|)作圆周运动, 则半径Rv的计算公式为:
式中:
同理, 弯道的曲率半径
式中:ω 2 为换道开始前的横摆角速度; Y'为车辆在换道过程中的横向位移。
图3中, 由几何关系可得:
由此可得:
联立式(10)(11)(12)(13)可得:
弯道路段TLC计算模型中, 偏航角度
车辆运行过程中, 车身横摆角速度存在较大的波动。基于惯性原理所测量得到的横摆角速度数据包含较大的噪声。为了降低横摆角速度数据的误差, 本文采用卡尔曼滤波器对横摆角速度数据进行滤波。由于采集得到的原始数据是离散型, 所以选用Kalman离散型滤波器。离散过程的状态变量为
式中:
为了简化计算, 假定协方差矩阵Q, R均为常数。
利用观测变量和预测变量对先验估计
式中:
与TLC预测模型相关的参数包括车辆与车道线的距离(车轮外侧与车道标线之间的距离)、车身横摆角速度、车辆行驶速度。其中, 车辆与车道线的距离来源于AWS视觉传感器, 该传感器基于机器视觉原理对车辆与车道线的距离进行实时测量, 输出参数包括车辆与左侧车道线距离dL; 车辆与右侧车道线距离dR; 测量精度为5 cm; 测量范围为± 635 cm; 输出频率为10 Hz。
车身横摆角速度数据来源安装于车辆中央的IMU02陀螺仪, 该传感器实时测量车身的横摆角速度数据, 横摆角速度测量范围为± 150 ° /s; 分辨率为0.1 ° /s; 输出频率最大为100 Hz。
此外, 所采集的自车行驶速度
数据采集设备安装于小型试验车上, 通过公开招募方式选择了11名被测试人员进行真实道路驾驶试验, 提取车辆换道过程中的相关数据。其中8名为男性, 3名为女性, 所有被试人员均能熟练地操作试验车辆。试验过程中天气良好, 所有被试人员生理心理情况正常。试验路段为G40沪陕高速蓝田段, 道路为双向6车道, 试验过程中道路通行正常。
对于实际道路正常驾驶过程中的试验数据, 选择某次换道过程中的原始测量参数, 利用本文提出的TLC预测模型对换道过程中的TLC值进行预测。其中, 原始测量数据如图4所示。
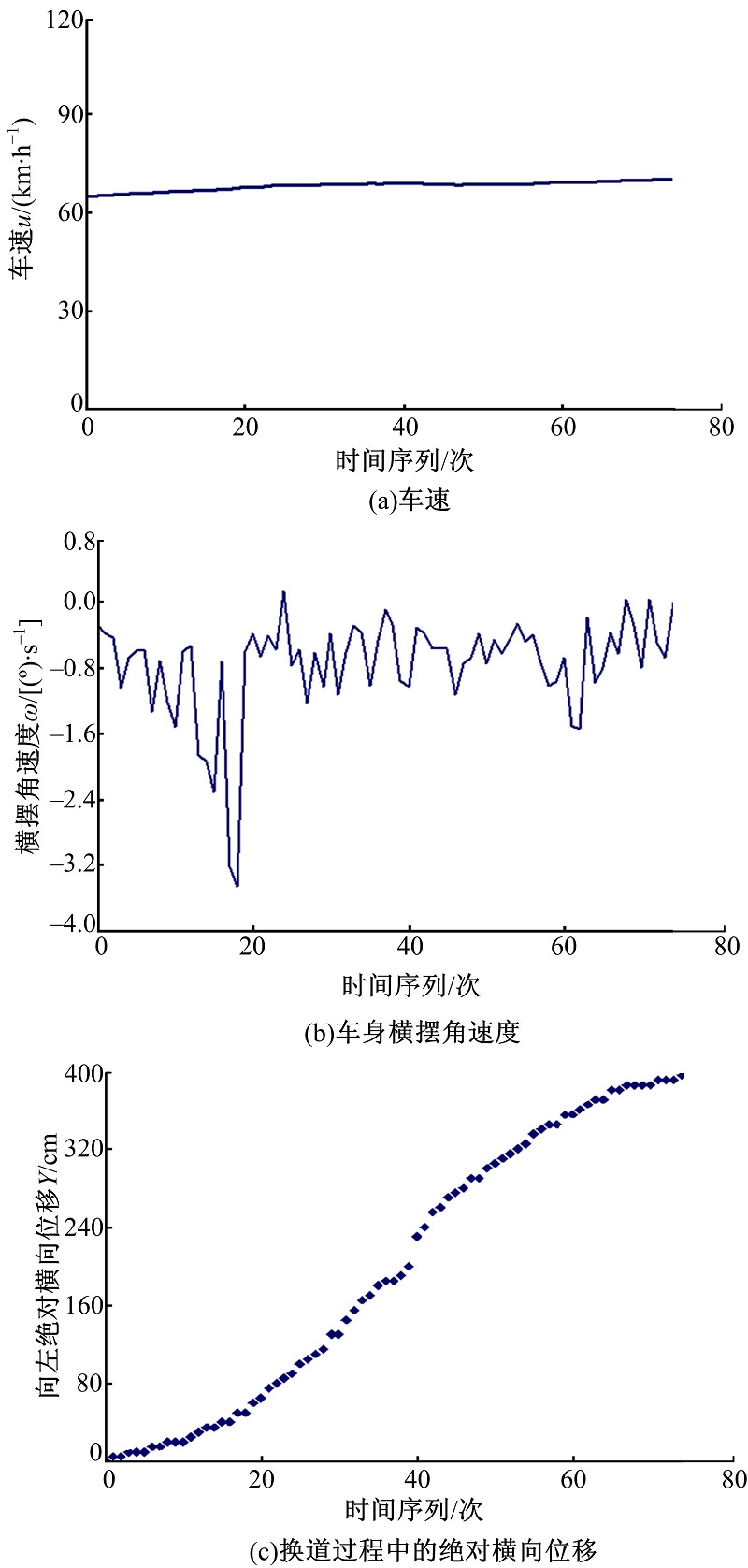 | 图4 直道路段原始测量数据Fig.4 Original data of straight road |
 | 图5 直道路段TLC值预测结果Fig.5 Predict result of TLC in straight road |
图4为完整的换道过程数据, 越线时刻预测部分处于该换道过程的初期阶段。图4中, 横轴为采样时间序列, 由于系统采样频率固定为10 Hz, 因此每两次采样之间的时间差为0.1 s。直接采用时间序列作为自变量可以减少求解过程中的计算量, 最后计算得到的TLC也可以由时间序列值直接表征。对于上述过程, 利用本文提出的TLC预测模型, 计算从换道开始0.8 s后到车辆越线时间段内的TLC数据, 结果如图5所示。
图5中, 实线为实际记录的越线时刻数据, 虚线为本文TLC预测模型所预测得到的TLC值。总体而言, 本文模型预测得到的TLC数据与真实值较接近, 但呈现一定的差异性。TLC模型预测结果为越线时刻TLCf, 而实际数据中的越线时刻TLCt是已知的, 通过对比分析TLCf与TLCt即可对越线预测模型的准确性进行检验。由于AWS视觉传感器工作频率为10 Hz, 即每两次数据采集之间的时间差为0.1 s, 因此对于计算得到的越线时刻TLCf保留1位小数, 方便与实际越线时刻TLCt进行对比[13, 14, 15]。以绝对时间误差值e为评价参数判断预测模型的准确性, 其中e的定义如下:
式中:e> 0表示预测越线时刻要早于实际越线时刻; e< 0则表示预测越线时刻要晚于实际越线时刻。
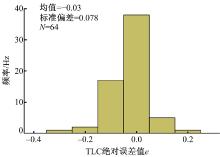
对检验样本的误差值
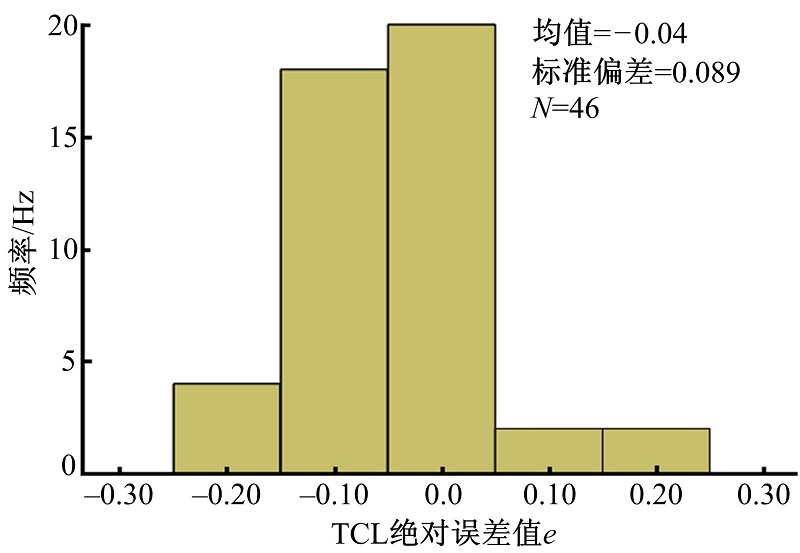 | 图6 直道路段TLC预测误差的直方图Fig.6 Histogram of TLC predict error in straight road |
 | 图7 直道路段越线时刻预测误差数据检验Fig.7 Error test of TLC predict in straight road |
图6表明, 本文所建立的TLC预测模型所预测的越线时间预测误差整体较小, 所有数据的误差都被限制在± 0.2 s内。检验数据中, 43.5%的预测值与真实越线时间保持一致, 87.0%的预测值与真实越线时间之间的误差绝对值小于等于0.1 s, 其他数据预测误差为± 0.2 s, 比例为13.0%。对所有误差数据进行正态分布Q-Q图检验, 结果如图7所示。
图7表明, Q-Q图法所得到的数据散点均集中于
选择实际驾驶过程中在弯道路段发生换道的时间段, 截取相应时间段内的原始数据, 利用本文提出的TLC预测模型对换道过程中的TLC值进行预测。对于某一次越线行为, 原始测量数据如图8所示。
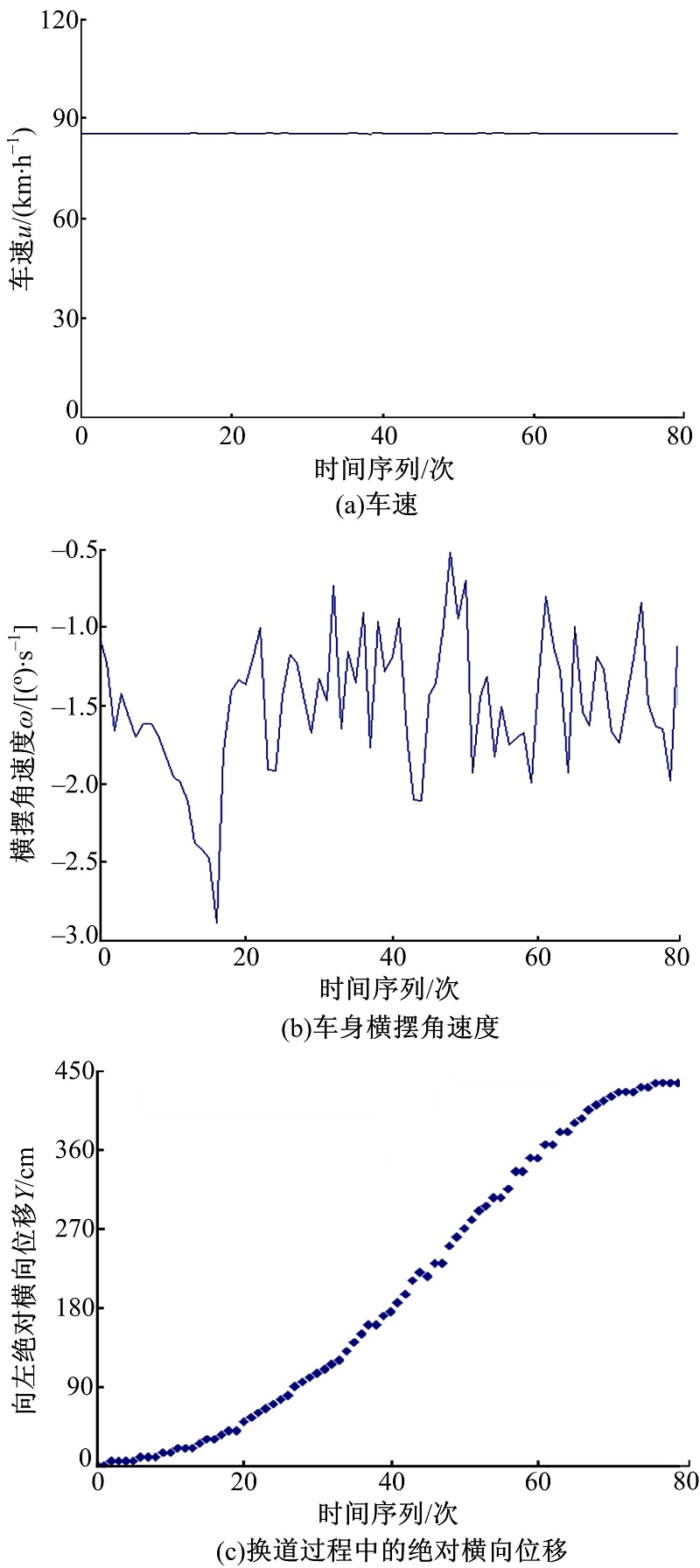 | 图8 弯道路段原始测量数据Fig.8 Original data of curve road |
对于上述过程, 利用本文提出的TLC预测模型计算从换道开始0.8 s后到车辆越线时间段内的TLC数据, 结果如图9所示。
 | 图9 弯道路段TLC值预测结果Fig.9 Predict result of TLC in curve road |
图9中, 实线为通过分析车道线距离数据所得到的真实越线时刻, 虚线为本文TLC预测模型所预测得到的TLC值。总体而言, 本文模型预测得到的弯道路段TLC数据与真实值较接近。对时间序列而言, 在越线的前期和后期越线结果与真实值接近, 在越线过程的中间呈现出一定的差异。
图10为利用绝对时间误差值
 | 图10 弯道路段TLC预测误差的直方图Fig.10 Histogram of TLC predict error in curve road |
 | 图11 弯道路段越线时刻预测误差数据检验Fig.11 Error test of TLC predict |
图11表明, Q-Q图法所得到的数据散点均集中于
(1)基于车辆运动过程中与车道线距离参数, 在对车辆偏航角度进行估计的情况下, 采用几何分析方法分别建立换道过程中的越线时刻预测模型, 实现了对直道路段和弯道路段换道过程中的越线时刻的实时预测。
(2)采用实测越线过程数据对模型有效性进行检验, 结果表明:直道路段预测误差绝对值小于等于0.1 s的比例达到了87.0%, 弯道路段相应的比例达到了93.7%, 且两种模型的预测误差均符合正态分布规律。
(3)弯道情况下, 根据弯道方向和换道方向共存在4种不同的类型, 本文只对其中一种类型进行了分析, 但建模思路同样适合于其他3种情况。当弯道路段设置有缓和曲线时, 本文模型的有效性没有进行单独验证, 原因在于缓和曲线的几何参数无法准确获取。本文进行的弯道验证试验中也存在部分缓和曲线, 实际检验结果表明模型准确度较好, 原因在于缓和曲线的曲率变化通常较为平缓, 模型对曲率误差的包容性能够解决缓和曲线的曲率变化问题。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|