

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于单个地磁传感器的交叉口排队长度估计
[贾利民1  , 陈娜
, 陈娜1 , 李海舰1, 2 , 董宏辉1, 3 ]
, 陈娜|
|


作者简介:贾利民(1963-),男,教授,博士生导师.研究方向:智能交通,交通安全.E-mail:jialm@vip.sina.com
通过对车辆排队机理进行建模,利用车辆通过传感器时间及车尾时距描述车辆排队演化过程,从而估计邻近信号灯周期内的车辆排队长度。分析了车辆通过传感器时间及车辆车尾时距的动态变化规律,并提出车尾时距模型、通过时间模型和综合模型等对排队长度进行估计。最后,利用现场试验对本方法进行验证,试验结果表明本文提出的模型和方法能够准确估计交叉口车辆排队长度,且系统成本低廉、部署方便,便于大规模推广应用,能够为信号灯周期优化、交通服务水平评价等应用提供基础数据。
To estimate the intersection queue length, a magnetic sensor is deployed near the stop line at the intersection. Through the vehicle queue mechanism modeling, the evolution of vehicle occupancy sensor time and the departure interval can be obtained. Eventually, the queue length of the last signal cycle can be estimated. This paper analyzes the variance of vehicle occupancy sensor time and the departure interval with the increase in queued vehicle number, thereby proposes departure interval model, vehicle occupancy sensor time model and comprehensive model to estimate the queue length. The accuracies of the proposed models are compared using field experiments. Results show that the proposed queue length estimation method can accurately get the queue length of the last signal cycle. The method costs low and can be deployed easily, and thus, it can facilitate large-scale popularization and application. It can provide intersection queue length information for signal cycle optimization and traffic service level evaluation in road signal intersections.
道路交叉口作为城市路网的关键结点, 其通行能力和控制机制直接影响着路网的畅通程度和服务水平, 车辆排队长度是衡量道路畅通程度和服务水平的一个重要指标。排队长度指某一红灯时刻, 进道口的停车线与最后一辆停止车辆间的距离, 实际计算中多以排队队列中的车辆数代替, 它也是评价信号交叉口运行效率的一个重要指标, 能及时反映交叉口处的运行状况, 对信号配时优化、道路服务水平评价等有至关重要的作用[1]。
现有车辆检测设备分为固定式检测器和移动式检测器。固定式检测器主要包括视频检测器[2, 3]、线圈检测器、地磁传感器[4]、红外线检测器、超声波检测器等, 它们利用某种物理原理对车辆进行检测, 并通过一定的算法获取车辆运行参数。移动式检测器主要为浮动车, 包括传统的浮动车和载有GPS或移动手机的行驶车辆。现有交叉口排队长度估计采用的车辆检测设备主要有视频检测器、线圈检测器、地磁传感器和浮动车等。视频检测器安装过程中需要对摄像机进行标定, 并且其获取的交通视频图像需进行一定的预处理及抖动消除, 之后利用车辆检测算法进行排队长度检测, 如基于移动虚拟线圈的排队长度检测算法[2, 5]、模式识别方法[6]等。基于线圈检测器的排队长度检测模型主要有交通波理论和累计到达-离去法[1, 7]。随着移动手机和车载GPS车辆的增多, 基于浮动车的排队长度检测模型日益增加, 其主要方法为在确定浮动车的分布规律后, 建立排队长度检测模型, 如基于车辆到达特性的排队长度估计模型[8]、利用队尾浮动车位置估算最大排队长度的方法[1, 9, 10]、随机建模方法[11]等。除此之外, 部分学者将浮动车与线圈检测数据相结合进行排队长度估计研究[12, 13]。地磁传感器同样可以准确获取交通流参数[14, 15, 16, 17], 并且可以用于车辆排队长度估计[18]。
利用视频、线圈检测器进行交叉口车辆排队检测具有检测成本高、布设及调试复杂等缺点; 传统浮动车检测具有成本高、操作复杂等特点, 且基于车载GPS或移动手机的检测方法容易受车辆条件限制, 导致这些技术都不便于大规模应用, 无法适应现今交叉口车辆排队长度信息的网络化需求。而地磁传感器便于组成功能丰富的无线传感器网络, 具有成本低廉、布设简单等优点, 可以有效地克服其他检测方法的不足, 并且其检测不受车辆条件限制。
目前, 基于地磁传感器的排队长度估计方法研究多利用多个传感器, 各传感器之间的时钟同步算法复杂, 其成本相对于单个地磁传感器较高, 调试和布设施工相对复杂。本文重点研究基于单个地磁传感器的交叉口车辆排队长度估计方法, 利用车辆通过单个地磁传感器时的关键信息, 对上一信号周期内车辆排队长度进行估计, 为信号灯周期优化、交通服务水平评价等应用提供基础数据。
交叉口车辆的排队行为符合车辆跟驰行为特征, 本文参照车辆跟驰模型对交叉口车辆排队情形进行类比描述。假设所有排队车辆满足匀速-加速-匀速模式, 即排队车辆均由匀速(某初始速度)开始起步(由于车辆从静止到某初始速度的时间和运行距离都较短, 为了简化问题, 忽略不计), 当与前车距离大于dneed时, 开始加速运动, 若起步瞬间已经满足加速条件, 则直接加速运动; 当车辆运行速度达到速度上限vmax时, 开始匀速运动, 典型交叉口排队场景如图1所示。图1中, lcar为平均车辆长度; linter为相邻车辆的跟车距离; d1为车辆停止线到第一辆排队车辆车尾的距离。本文将通过分析排队车辆通过单地磁传感器的时间特性估计上一信号周期内的排队车辆数。
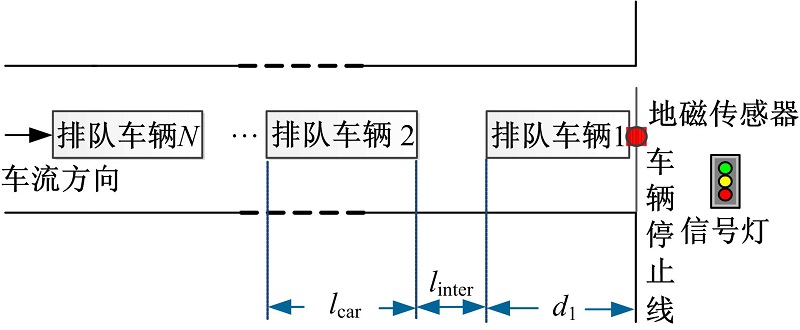 | 图1 典型道路交叉口排队场景Fig.1 Typical road intersection queuing scene |
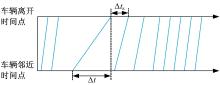
通过单地磁传感器可以获取多种交通流参数[15, 16, 17], 包括各车辆邻近和离开传感器的时间点、车流量、车速和车型等。利用车辆检测算法[16, 17], 获取车辆邻近时间点和离开时间点, 由此可得到连续时间车流中各车辆依次通过该地磁传感器的时间点对示意图, 如图2所示, 其中前后两车辆离开传感器时间之差定义为车尾时距, 记为Δ ts; 车辆邻近和离开传感器的时间差定义为车辆通过时间, 记为Δ t。
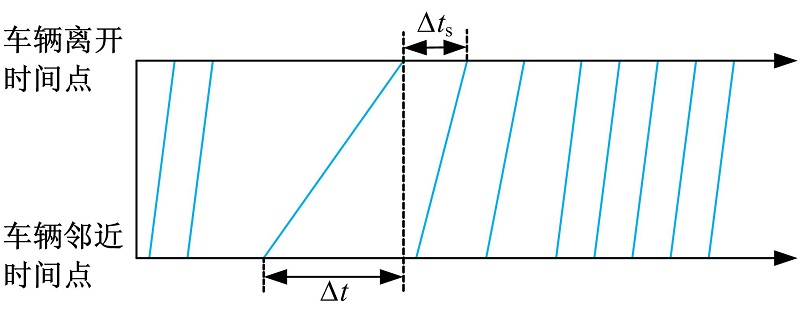 | 图2 各车辆依次通过地磁传感器的时间点对示意图Fig.2 Time pairs of vehicles passing through magnetic sensor in turn in schematic |
为了更好地描述车辆在交叉口的跟驰和排队机理, 本文做出如下假设和参数设定:①第一辆排队车辆车头紧贴停止线; ②排队车流的平均车辆长度为lcar, 则d1=lcar; ③相邻车辆的跟车距离为linter; ④驾驶员的反应时间与动作时间之和为tr;⑤车辆加速度为a;⑥地磁传感器紧贴停止线布置; ⑦车辆初始速度为vstart; ⑧排队车辆数为N; ⑨第i辆车开始加速之前匀速运行的时间为tc (i), 经过停止线的时间为ts (i), 车尾离开停止线的速度为v(i), 通过地磁传感器的时间为Δ t(i), 与第i-1辆车经过停止线的时间差为Δ ts (i); ⑩第i辆排队车辆车尾距离停止线的距离为di, 则
设排队车辆中第一辆车开始启动时为0时刻, 易得
本文通过揭示车辆跟驰和排队机理, 分析车辆通过地磁传感器的时间Δ t(i)及相邻排队车辆车尾时距Δ ts(i)的动态变化情况, 并在此基础上研究基于单个地磁传感器的排队长度后估计方法。
(1)车尾时距模型(即Δ ts(i)模型)
研究Δ ts (i)的变化规律需先获得ts (i), ts (i)的取值与第i-1辆车的运行状态相关, 由此可分为以下两种情形。
情形一(满足直接加速条件):当第二辆排队车辆起步时, 它与前车距离已经达到dneed, 即
分析排队车辆消散过程可知,
若N较小,第N个排队车辆的车尾到达停车线前速度未增至vmax, 即v(N)< vmax, 则按照式(1)计算Δ ts (i):
若N较大, 则按照式(2)计算Δ ts (i):
情形二(不满足直接加速条件):当第二辆排队车辆起步时, 它与前车距离未达到dneed, 即
此情形下需要判断第二辆车何时加速。同样, N较小时, 在车尾到达停止线之前第二辆车及之后车辆都无法满足加速条件, 即各车辆以初始速度匀速通过停止线, 则Δ ts (i)如式(3)所示。相邻车辆的加速时间差满足式(4)。
若N较大, 必存在某排队车辆k开始加速时, 车尾未通过停止线, 并且其车尾到达停止线时的速度未达到vmax 。排队车辆k为情形二中所有排队车辆中首个满足加速时车辆运行距离与相应的di 之差为负的车辆。排队车辆m可根据情形二中的条件计算或仿真获得, 与情形一中相类似。随着排队车辆数的继续增加, 必存在某排队车辆m, 其车尾到达停止线之前速度增至vmax, 并以速度vmax行驶至停止线, 则按照式(5)计算
式中:
图3给出了在一次排队车辆消散过程中不同情形下的Δ ts(i)的变化趋势, 在排队车辆数较少时, Δ ts(i)的变化曲线单调不增, 但无分段点; 排队车辆数较多时, 由于车辆性能和道路条件的物理约束, Δ ts(i)的变化曲线单调不增时出现若干分段点。通过Δ ts(i)的变化情况能够清晰地描述一次排队的车辆消散过程。
 | 图3 Δ ts(i)的变化趋势图Fig.3 Trend of Δ ts(i) |
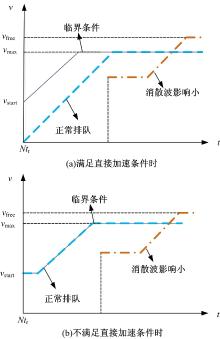
在排队消散过程中, 上游到达受到排队消散影响的车辆
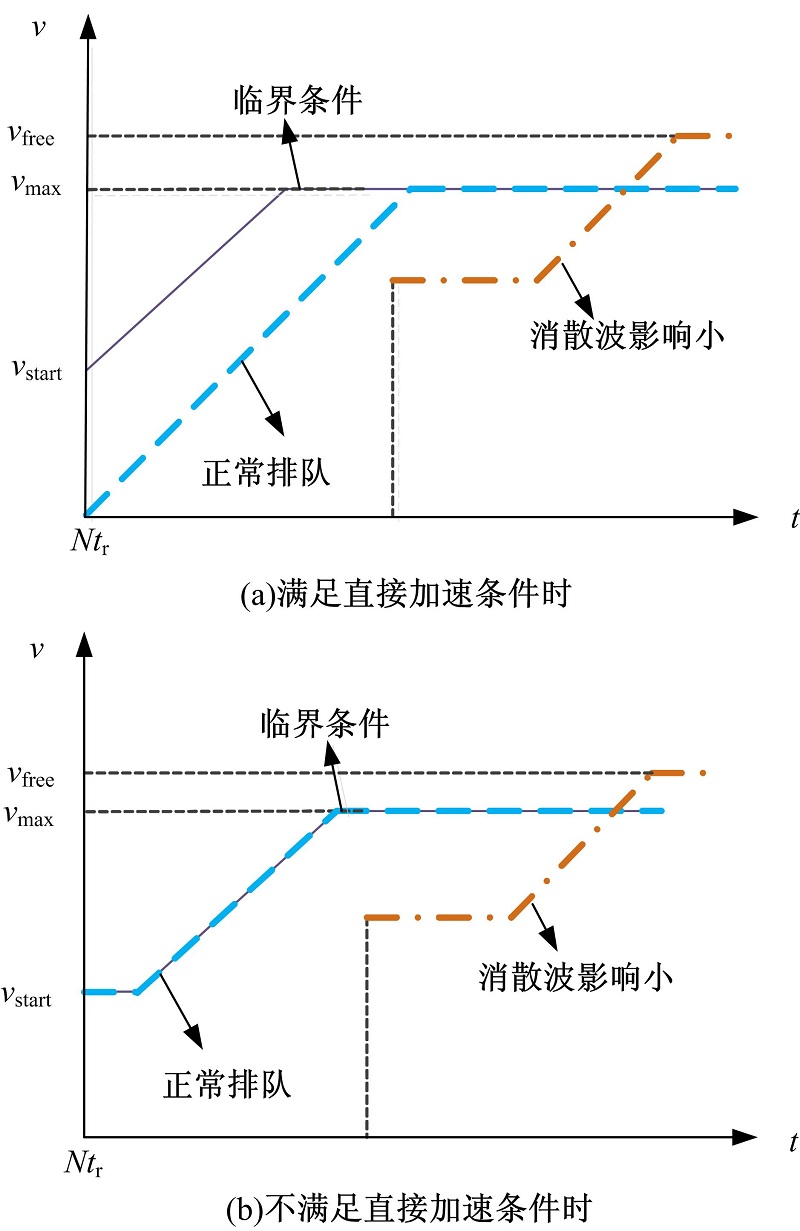 | 图4 上游到达受排队消散影响车辆的v-t曲线图Fig.4 v-t diagram of upstream vehicle arrival affected by queue dissipation |
(2)通过时间模型(即
同Δ ts(i)模型, 根据是否满足车辆加速条件, Δ t(i)模型同样需要分为两种情形讨论。
情形一(满足直接加速条件):同Δ ts(i)模型所述。若N较小, 第N个排队车辆的车尾到达停车线前速度未增至vmax, 即v(N)< vmax, 则根据式(6)计算Δ t(i):
若N较大, 必存在某排队车辆m的车尾行驶至停止线时, 其速度已经或刚好达到vmax, 即
排队车辆m的标定方法同Δ ts(i)模型的情形一。
情形二(不满足直接加速条件):同
若N较大, 后续排队车辆会在某时刻加速运动, 随着排队车辆数N的增大, 必存在某排队车辆k开始加速时, 车尾未通过停止线, 并且其车尾到达停止线时的速度未达到vmax; 随着排队车辆数的继续增加, 必存在某排队车辆m, 其车尾到达停止线之前速度增至vmax, 并以速度vmax行驶至停止线, 则
vh(i)为车辆i的车头到达停止线时的车速:
v(i)与式(5)中相同; 排队车辆k与m标定方法同Δ ts(i))模型的情形二。
在一次排队车辆消散过程中不同情形下的Δ t(i)的变化趋势和变化规律与Δ ts(i)类似, 文中不再赘述。可以看出, 在每一次排队车辆消散过程中Δ ts(i)和Δ t(i)具有不增性和有限性, 这也是基于单个地磁传感器进行排队长度后估计的理论基础。同样, 根据图4可以分析得出, 上游到达受到排队消散影响的车辆v(i)具有递增性, 即Δ t(i)具有递减性。
由文献[15]和[17]可知, 地磁传感器获取的车辆波形数据反映了传感器周围的磁场强度在不同时间点的变化情况, 利用车辆检测算法[15, 17]获取车辆邻近和离开传感器时间点时会存在一个附加长度le, 这样需要对通过时间模型进行修正, 设r为修正系数, 则可利用式(10)对Δ t(i)进行修正:
式中:Δ tnew为修正后的车辆通过时间; r为修正系数,
在连续时间交通流中, 有些车辆在绿灯期间没有排队便行驶通过传感器, 称为通过车辆; 有些车辆则在红灯期间排队之后通过传感器, 称为排队车辆。在进行排队长度后估计之前, 需要确定连续时间交通流中的排队车辆。本文给出通过信号灯交叉口的连续时间交通流中每个排队周期的排队车辆判别依据:①
(1)车尾时距模型
车尾时距模型为仅根据计算Δ ts(i)来估计排队长度。理论上, 在判定出信号周期内第一辆排队车辆后, 在绿灯和黄灯时间内, 依次对比通过车辆的Δ ts(i)与理论排队车辆的Δ ts(i), 结合上游到达受到排队消散影响的车辆Δ ts(i)具有递增性这一特性, 计算两者差值, 若相对误差在可控范围δ 内, 即可判断其是排队车辆, 反之不是。假设从第一个排队车辆起, 第k+1个车首先被判断为不是排队车辆, 则此周期内的排队长度估计值lestimate=dk 。其算法如下:
(1)根据停车判定条件判断出第一辆停车车辆, k=1, i=1
(2)if绿灯与黄灯时间内无后续车辆
then执行第(4)步
else i=i+1进入第(3)步
end if
(3)if实际计算的Δ ts(i)值不大于(1+δ )倍的理论值Δ ts(i)
then k=k+1, 重复执行第2步
else 执行第4步
end if
(4)排队长度估计值lestimate=dk, 返回1继续判断下个排队周期
为了简单起见, 可单独使用一个或多个Δ ts(i)值进行排队车辆判断, 比如前k个车辆用Δ ts(k)判断是否排队, 第k+1到N用Δ ts(k+1)判定等。
(2)通过时间模型
通过时间模型是仅根据计算Δ t(i)来估计排队长度的方法。其判别算法只需将车尾时距模型中第(3)步的判定条件改为“ 实际计算的Δ t(i)不小于(1+δ )倍的理论值Δ tnew(i)” 。同样, 也可单独使用一个或多个通过时间理论值进行判断。若使用一个值, 则可选用rlcar/vmax作为排队车辆中实际计算的Δ t(i)的下限, 若实际计算的Δ t(i)不小于(1+δ )倍的rlcar/vmax, 则车辆i为排队车辆, 否则不是。若使用多个离散值进行判定, 类似车尾时距模型, 比如前k个车用Δ tnew (k)判断, 第k+1到N辆车用Δ tnew (k+1)判定。
(3)综合模型
综合模型同时考虑了车尾时距模型和通过时间模型, 即两者的判别条件都需要满足。设用车尾时距模型得到的排队车辆数为nd, 用通过时间模型得到的排队车辆数为nv, 用综合模型得到的排队车辆数为nc, 则满足nc=min{nd, nv}。
通过在某车辆排队交叉口部署单个地磁传感器对本文方法进行验证, 利用视频记录现场排队情况, 并作为实验结果的对比依据。由定数排队理论可知, 排队车辆数可近似代替排队长度[19]。本试验将分别利用车尾时距模型、通过时间模型和综合模型估计排队车辆数, 进而分析各模型的试验结果。
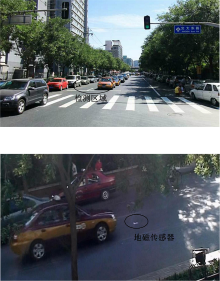
该试验地点位于北京市海淀区交大东路, 如图5所示, 地磁传感器布设于交大东路某信号灯停车线处。交大东路为南北双向两车道, 排队车辆为单车道分布。
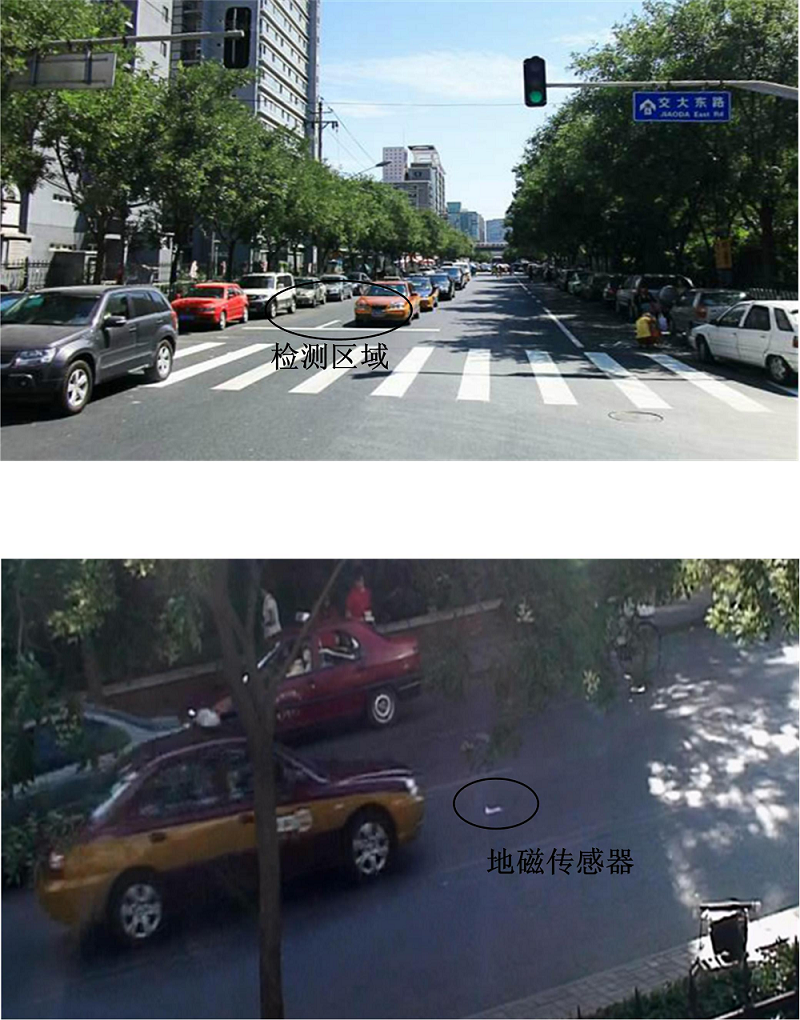 | 图5 单地磁传感器交大东路布设地点Fig.5 Layout of single magnetic sensor at Jiaodadonglu in Beijing |
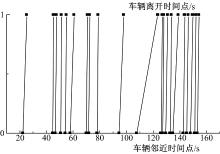
利用该地磁传感器实时采集现场交通信息数据, 得到连续地磁波形数据, 利用车辆检测算法[15]得到连续交通流中各车辆通过该地磁传感器时的邻近时间点和离开时间点, 图6为实际某交通流各车辆依次通过地磁传感器的时间点对图, 并在图中标示出了交通流车尾时距Δts(i)及车辆通过时间Δt(i)。
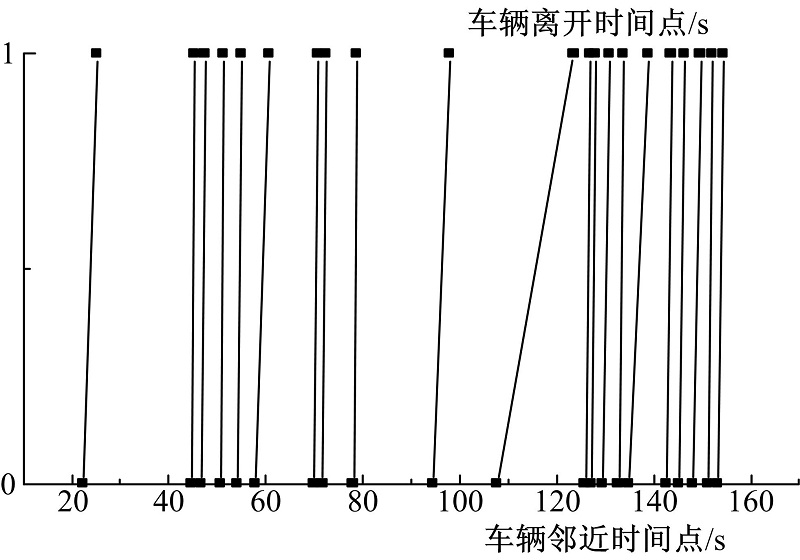 | 图6 实际各车辆依次通过地磁传感器的时间点对图Fig.6 Real time pairs of vehicles passing through magnetic sensor in turn |
试验选取2009年6月30日17:26~18:00视频检测数据, 以小汽车为主要车型进行参数标定, 信号周期为72 s, 其中, 红灯时间tred=24 s, 黄灯时间2 s, 绿灯时间56 s。本文参照已有研究成果及相关标准、规范进行参数标定。取lcar=4.5 m, le=1.8 m[15], 则修正系数r=(lcar+le)/lcar=1.4; 驾驶员驶入交叉口的加速度与具体交叉口条件相关, 需单独测定[20]。本文对试验交叉口加速度进行标定, 取平均值a=1.89 m/s2; vstart取停车邻近速度5 km/h[1]; vmax采用直行驶进交叉口排队车辆的最大速度25 km/h[20]; tr取男女加速反应时间均值1.5 s[21]; linter取车辆慢速行驶的安全间隔2 m[3, 22]; 本文选取5个排队周期内第二辆排队车辆开始加速时与前车的距离值并取平均值, 标定dneed=10.88 m。
根据已知参数, 可得Δ ts(1)=Δ t(1)=2.18 s, Δ tnew(1)=1.4× Δ t(1)=3.052 s。利用停车判定条件, 得2009年6月30日17:26~18:00内, 共有17次排队, 与实际情况相符合。
通过模型参数标定可知, 该试验路段在计算Δ ts(i)与Δ t(i)时均符合情形二, 且k=2。第2辆及之后排队车辆的Δ ts(i)和Δ tnew(i)理论值如表1所示。
| 表1 Δ ts(i)和Δ tnew(i)的理论值 Table 1 Theoretical values of Δ ts(i) and Δ tnew(i) |
取δ =20%, 根据各模型所得的排队车辆数如表2所示。
| 表2 排队车辆数对比 Table 2 Queuing vehicles contrast 单位:辆 |
由表2可得:车尾时距模型、通过时间模型、综合模型的整体相对误差分别为13.04%、22.83%、2.17%。
由上述试验结果可以看出, 本文提出的3种模型中车尾时距模型和综合模型效果均较好, 通过时间模型效果相对较差。结合对试验交叉口观测结果可知, 通过时间模型客观干扰因素主要有:①试验交叉口车型不统一, 存在大型公交车, 需要结合车型识别系统提高lcar的估计精度; ②交叉口处行人闯红灯现象较多, 对正常的车辆跟驰行为产生一定的影响。由估计误差可知, 车尾时距模型和综合模型对混合交通的鲁棒性较好, 可进行实际应用。另外, 本文提出的估计方法每车道仅需要一个地磁传感器即可实现, 成本低廉, 便于大规模部署和实际推广。由各模型的判别算法可知, 该估计方法计算简洁, 通过标定各交叉口的模型参数, 可以离线求得表1中的通过时间和车尾时距参数, 结合传感器检测得到的交通流时间参数可以直接进行比较和判别, 无需复杂的机器学习和数据处理算法, 便于在线估计。
通过对排队车辆消散过程进行建模, 得到可有效估计车辆排队长度的时间模型, 包括车尾时距模型、通过时间模型和综合模型。通过现场试验验证了3种模型的有效性, 其中综合模型在准确率和鲁棒性方面优势明显。与传统基于视频检测器、多线圈检测器融合、多地磁传感器融合或浮动车的排队长度估计方法相比, 本文估计方法计算简单, 便于在线系统实现。另外每车道仅需一个地磁传感器, 成本低并且布设方便, 便于大规模部署和实际推广。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|