{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于硬件限幅器和LMS自适应算法的GPS接收机干扰抑制方法
[李正训1, 2  , 孙晓颖
, 孙晓颖1 , 曲良东1 , 刘妍妍1 , 允光石1, 2 ]
, 孙晓颖, 曲良东|
|


作者简介:李正训(1975-),男,副教授,硕士.研究方向:移动通信网络分析和设计.E-mail:rijh1010@163.com
根据硬件限幅器抑制小信号的特性得到干扰信号,将硬件限幅器输出信号作为自适应算法的参考信号,再利用LMS的自适应特性消除GPS接收机输入信号中的时变强干扰信号,最终抑制干扰获得有效信号。仿真结果表明该方法对未知源的强干扰信号具有较好的抑制性能,当信干比在-25~-35 dB时干扰抑制能力可改善30 dB以上。
Based on the small signal suppression performance of hard-limiter, the interference signal is obtained. The reference signal of adaptive algorithm is formed using output signals of the hard-limiter; then based on the adaptive performance of Least Mean Square (LMS), the strong time-varying interference of GPS receiver input signal is cancelled. Finally, the interference signal is suppressed and the effective signal is obtained. Simulation results show that the proposed algorithm has good suppression performance for unknown strong interference signal and improve interference suppression capability by more than 30 dB when Signal to Interference Ratio (SIR) is in the range from -25 dB to -35 dB.
导航卫星离地面远、星载发射机发射功率有限导致GPS接收机的接收信号易受干扰, 因此研究GPS接收机的干扰抑制方法是具有理论意义和应用价值的。GPS接收机干扰可以分为压制式干扰(又称阻塞式干扰)和欺骗性干扰两大类。压制式干扰是利用干扰机发射强干扰信号, 阻塞GPS接收机, 使接收机工作能力降低, 甚至无法工作; 欺骗性干扰是将接收到的GPS信号重新转发出去或者发射与GPS信号相同的虚假导航信息来欺骗接收机。一般情况下, GPS接收机受到的干扰主要是阻塞式干扰, 其干扰源可能是人为的或是自然环境产生的。例如, GPS接收机附近有大功率无线发射设备, 其工作频率在GPS信号带宽内时, 有可能使GPS接收机无法正常工作。因此增强抗阻塞式干扰能力是提高GPS性能的重要途径之一。
GPS接收机干扰抑制技术有很多, 如空域处理技术、时间/频谱滤波技术、振幅/相位对消技术和自适应算法技术等, 不同技术在特定干扰环境下都有自己的特点。空域干扰抑制技术是通过在干扰信号源方向产生零陷来抑制干扰信号的, 当干扰源方向稳定时可以获得较好的干扰抑制效果, 但此方法需要许多成套电子设备, 成本较高[1, 2, 3]。时间/频谱滤波技术和振幅/相位对消技术的干扰抑制能力较高, 但是在干扰信号特性不相同的情况下, 其处理原理、成本高低和实现复杂性等都各不相同, 普适性较差[4, 5, 6, 7]。自适应算法技术对于时变干扰信号具有较强的干扰抑制能力, 但自适应算法的干扰抑制性能依赖于参考信号的选取[8, 9, 10, 11]。
当GPS接收机受到的干扰信号强度较大, 且是位置不确定的时变窄带信号时, 采用自适应算法技术比较合适。而利用自适应算法进行干扰抑制时, 如何获得参考信号是主要考虑的问题。现有的GPS接收机干扰抑制技术中对参考信号获取方法的研究相对较少。
本文针对上述GPS接收机所受干扰的信号特点, 利用硬件限幅器的非线性特性来得到干扰信号, 即当混合信号通过硬件限幅器时, 由于输入信号中的GPS信号被干扰信号抑制, 因此硬件限幅器输出信号主要是干扰信号。然后利用输出的干扰信号作为最小均方(Least mean square, LMS)自适应算法的参考信号, 在时变窄带强干扰信号源位置不确定的情况下, 实现对干扰信号的抑制。通过对干扰抑制改善前、后情况和误码率(Bit error rate, BER)特性的仿真, 证明该方案具有较好的干扰抑制特性。
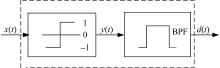
为了抑制GPS接收机受到的强干扰信号, 首先要获得干扰信号的模型。由于在干扰信号特性和干扰源的位置未知的条件下, 空域处理技术和一般的滤波处理方法都不能获得很好的干扰信号模型。因此本文利用硬件限幅器提取干扰信号模型[8], 根据硬件限幅器的抑制小信号的特性, 可以得到干扰信号模型。硬件限幅器模型如图1所示, 图1中输入信号
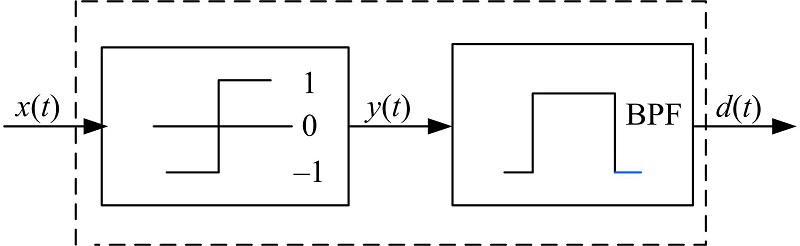 | 图1 硬件限幅器模型Fig.1 Device model of hard-limiter |
硬件限幅器模型包含硬件限幅器和带通滤波器两部分, 主要利用带通滤波器来获取强信号的基本成分。下面将详细说明干扰信号的提取方法, 以下硬件限幅器模型简称硬限幅器。
由GPS信号模型可知, 硬限幅器的输入信号
式中:
在上述GPS接收机所受干扰的情况下, 由于干扰信号强度远大于GPS的有效接收信号, 可知其干扰信号与有效信号的振幅比为:
干扰信号与有效信号的角频率差为:
因此, 式(1)可转化为:
式中:
设硬限幅器的非线性输入输出特性为:
硬限幅器输出信号
此时, 由于带通滤波器输出信号的振幅固定, 只需保存输入信号的相位, 如式(5)所示:
式中:
利用三角法变换公式, 式(5)可表示为:
式中:
由式(2)条件, 式(6)可以表达为:
通过式(7)可以知道, 当干扰信号强度远大于有效信号时, 利用硬限幅器的非线性特性可以得到干扰信号模型, 自适应算法参考信号可以利用限幅器(包括BPF)的输出来获得。
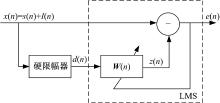
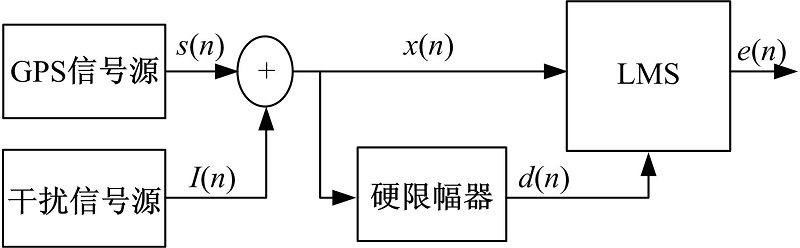
基于前文所述干扰抑制方法的各自特点, 本文将硬限幅器与LMS自适应算法相结合, 构成了干扰抑制器。由式(7)可知, 通过具有非线性特性的硬限幅器可以有效地获得干扰信号, 利用该干扰信号模型可以设计相应的干扰抑制方法。但是当利用基于抵消原理的干扰抑制方法时, 干扰信号振幅变化将导致干扰抑制效果下降, 因此, 为了增强干扰抑制效果需要追踪干扰信号的振幅变化。本文设计的干扰抑制器利用LMS自适应算法来追踪输入信号中的强干扰信号变化情况, 从而获得较好的干扰抑制效果。
硬限幅器与自适应算法相结合的干扰抑制器框图如图2所示。图2中, 输入信号
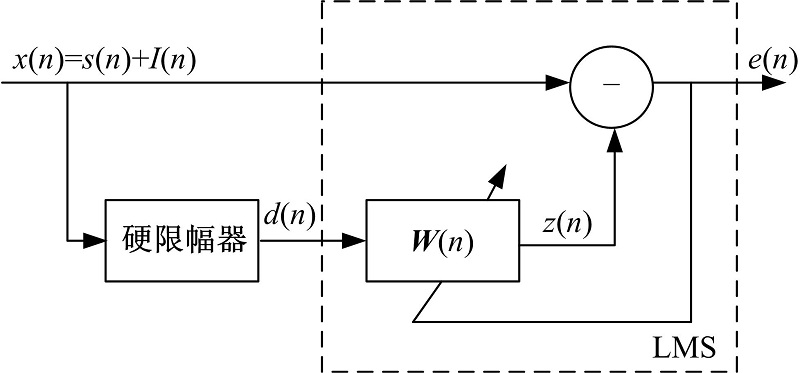 | 图2 干扰抑制器框图Fig.2 Diagram of the interference suppressor |
为了便于解释原理, 式(6)中仅设定了干扰成分和有效成分, 因此可将硬限幅器的输出信号表示为:
在信号
式中:
由式(1)(8)可得到:
式中:
由于式(2)的条件, 即干扰信号远大于有效信号, 式(10)可修改为式(11):
对于确定的
当权矢量
式中:
因此可知, 根据LMS自适应算法的收敛特性, 当误差的均方值收敛至最小时, 干扰信号误差收敛至最小。尤其在理想的情况下, 即当
这意味着, 自适应算法能够追踪输入信号中的干扰成分, 抑制干扰信号, 从而留下有效信号。
在基于最快下降法的LMS算法中, 权矢量为:
式中:
式(15)表明权矢量在
LMS自适应算法是以最快下降法为原则的迭代算法, 具有收敛速率较快、运算量较小等特点[8, 9], 可以实现对干扰源的快速抑制。
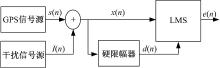
根据以上提出的GPS接收机干扰抑制方法, 对其干扰抑制性能进行了仿真。主要考察干扰抑制前、后的改善情况, 误码率特性, 仿真框图如图3所示。
 | 图3 干扰抑制器仿真框图Fig.3 Simulation diagram of the interference suppressor |
采用Matlab/Simulink进行干扰抑制特性仿真, 干扰抑制器主要由GPS信号源、干扰信号源、硬限幅器和LMS组成, 其中GPS信号源采用常用C/A码; 干扰信号源采用CW和AM信号。将GPS信号和干扰信号的混合信号作为LMS的输入信号, 将硬限幅器的输出信号(干扰信号)作为LMS的参考信号, 干扰抑制输出信号由LMS仿真模型输出端中的误差输出口输出。从GPS接收机的结构来看, GPS射频信号通过频率变换器变成中频信号, 然后进行解扩、解调等其他信号处理。干扰抑制在解扩处理前进行, 因此, 在GPS信号的中频带宽内进行干扰抑制特性的仿真。
仿真参数设置如下:GPS信号为C/A码; 扩频码速率为1.023 Mcp/s; 仿真载波频率为1.023 MHz; 干扰信号为CW和AM信号; 干扰信号的载波频率为500 kHz; 考虑窄带干扰的情况, 硬限幅器带通滤波器带宽为10 kHz; LMS自适应算法的长度为16。
LMS自适应算法的误差特性和收敛速率主要由步长因子
| 表1 随着步长因子变化的BER特性 Table 1 BER characteristic as step factor variation |
从表1中可以看出, 当
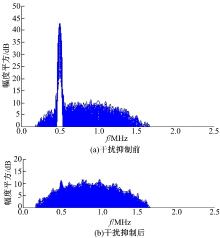
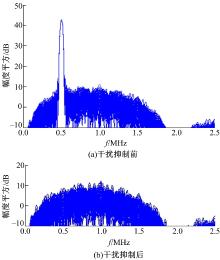
干扰源分别为AM和CW信号时, 对比干扰信号抑制前、后的信号频谱。
当干扰源为AM信号, SIR为-30 dB和步长系数为0.000 08时, 其干扰抑制前、后的信号频谱如图4所示, 从图4可以看出:本文方法对AM干扰信号的抑制效果明显, 获得约32 dB的改善。当干扰源为CW信号, 信干比为-30 dB和步长系数为0.000 08时, 其干扰抑制前、后的信号频谱如图5所示, 从图5可以看到, 本文方法对CW干扰信号的抑制效果更好, 获得了35 dB以上的改善。
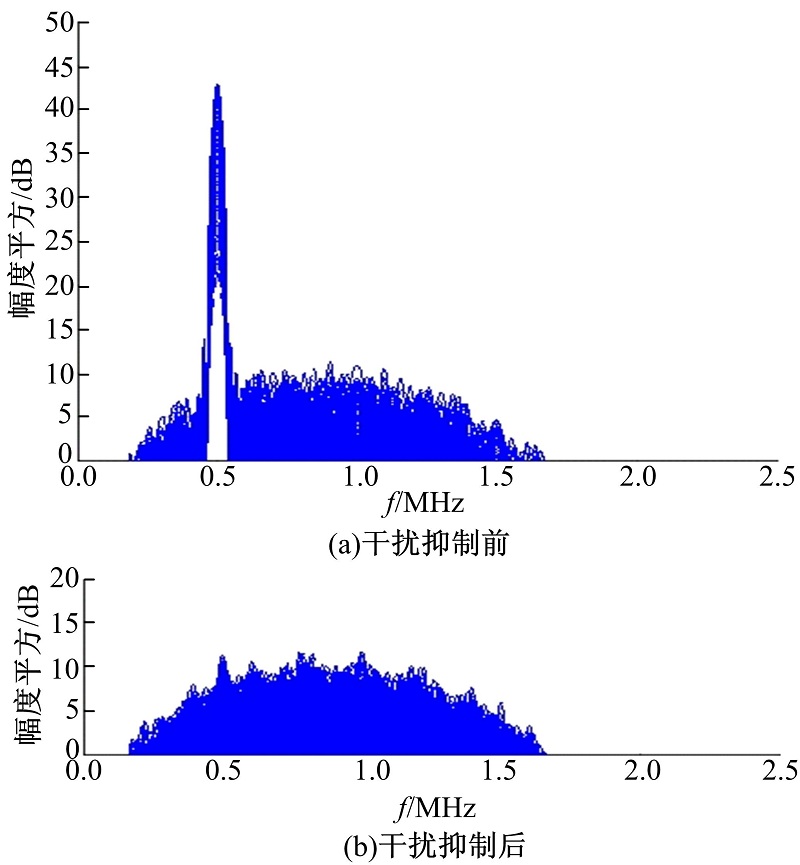 | 图4 AM干扰时, 干扰抑制前、后信号频谱Fig.4 Signal spectrum before and after interference suppression for AM interference |
 | 图5 CW干扰时, 干扰抑制前、后信号频谱Fig.5 Signal spectrum before and after interference suppression for CW interference |
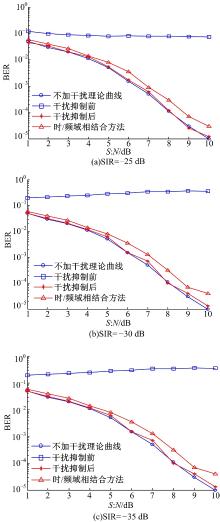
干扰抑制是在硬限幅器带通滤波器带宽内抵消两种信号的过程, 由于硬限幅器输出信号并不是理想干扰信号(见式(6)), 导致在干扰抑制过程中GPS接收信号频谱有一定程度的损失。因此, 为了评价频谱损失对GPS接收机正常工作的影响, 进一步对C/A码的误码率特性进行了仿真, 并与文献[4]的时域和频域相结合干扰抑制方法进行对比。当SIR分别为-25、-30、-35 dB时, 仿真结果如图6所示。由图6可知:在受到强干扰信号影响的情况下, 如果不经过干扰抑制处理, GPS接收机无法正常工作, 见图中干扰抑制前的曲线。
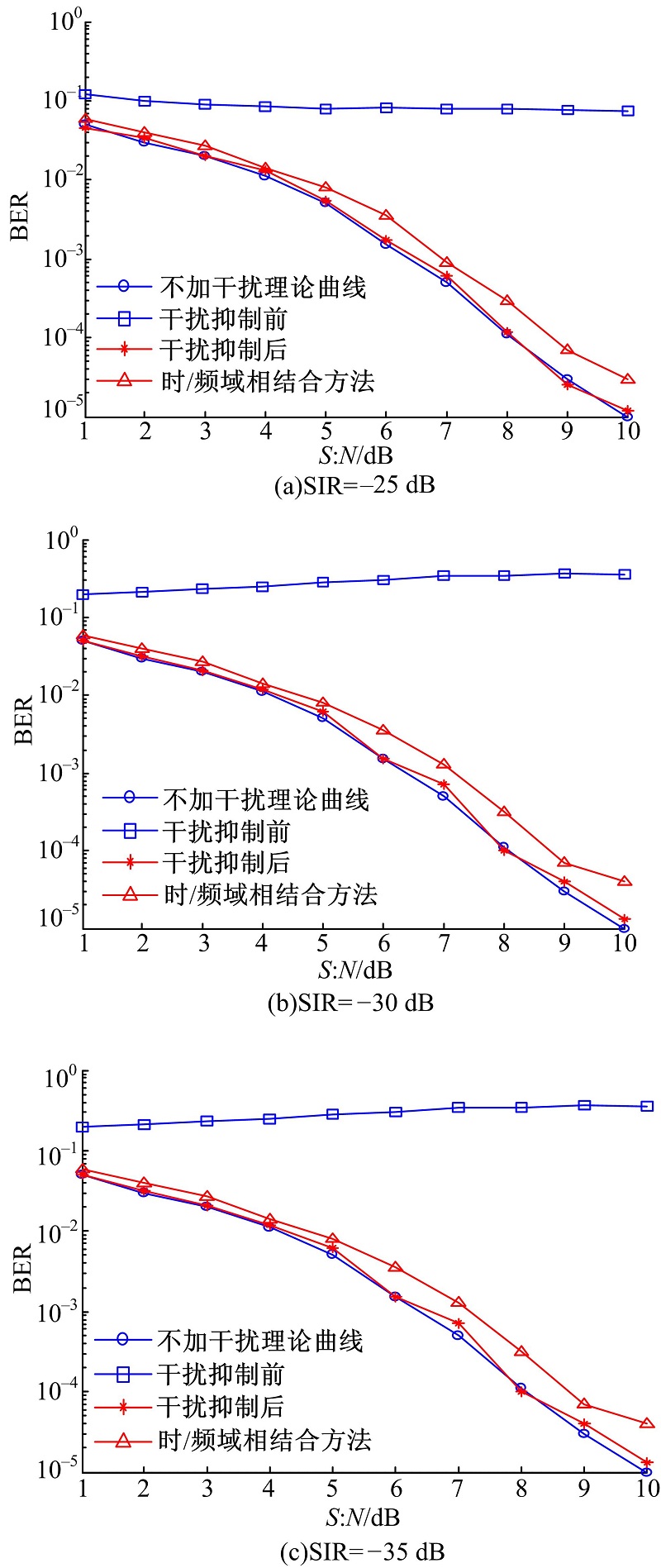 | 图6 不同信干比时C/A码误码率特性Fig.6 BER characteristics of C/A code of different SIR |
干扰抑制后C/A码的误码率特性近似于不加干扰信号影响时的理论曲线。由仿真结果可以看出:干扰抑制后误码率曲线与不加干扰时理论曲线相差约0.2 dB; 从图6可以看到, 在设定的信干比条件下, 相同BER时, 采用本文设计的干扰抑制方法获得的
针对GPS接收机受窄带时变、信源位置未知的强信号干扰的情况, 提出了一种硬件限幅器与LMS自适应算法相结合的干扰抑制方法。该方法的核心思想是利用硬限幅器非线性特性得到干扰信号的模型, 再利用LMS自适应算法估计时变干扰信号来抑制干扰成分。干扰抑制器仿真结果显示:SIR为-25~-35 dB时, 对于常见的AM和CW干扰信号, 可以获得30 dB以上的干扰抑制效果。该方法与时域和频域相结合的窄带干扰抑制方法相比, 可以获得一定程度的性能改善。在空域调零方法及一般滤波处理方法无法提高干扰抑制效果时, 本文方法可以实现较好的抑制效果。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|