




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
最小二乘权值平滑滤波技术在核磁共振信号处理中的应用
[孙淑琴1, 2  , 刘骏妍
, 刘骏妍1, 2 , 蒋川东1, 2 , 孟庆云1, 2 , 林君1, 2 , 彭良玉1, 2 ]
, 刘骏妍, 彭良玉|
|


作者简介:孙淑琴(1969-),女,教授,博士.研究方向:数字信号处理.E-mail:sunsq@jlu.edu.cn
采用最小二乘权值平滑滤波法对核磁共振地下水探测仪接收到的信号进行滤波处理,并与滑动平均权值滤波方法进行比较。仿真试验结果表明:利用最小二乘权值平滑滤波法能够取得更准确的核磁共振(Magnetic resonance sounding,MRS)信号特征参数,信噪比也得到了提高;最小二乘权值平滑滤波法更适合于随机噪声和尖峰噪声的去除;利用最小二乘权值平滑滤波法进行去噪时要选择合适的权值。其中MRS信号特征参数的拟合误差能够控制在1%以内,且信号曲线的平滑度得到了很大的改善。同时实测数据的滤波处理进一步证明了该方法的可行性。
, LIU Jun-yan, PENG Liang-yuLeast Square Weighted Smoothing Filter (LSW-SF) method is used to filter Magnetic Resonance Sound (MRS) signals, which is compared with the moving average filter method. Results of a large number of simulation experiments show the following characteristics. First, the more accurate characteristic parameters of MRS can be obtained using the LSW-SF method, and the Signal to Noise Ratio (SNR) is also improved. Second, the LSW-SF method is more suitable for random noise and rush noise removal. Third, appropriate weights should be chosen when the LSW-SF method is used to wipe out noise. Among them fitting error of MRS signal characteristic parameters can be controlled within 1%, and the smoothness of the signal curve is greatly improved. Meanwhile, the filter processing of the measured data indicates this method is effective.
地面核磁共振(Magnetic resonance sounding, MRS)技术是目前最为直接的探测地下水的地球物理方法, 得到了广泛的应用[1, 2]。野外试验采集到的数据需要进行滤波处理, 才能获得准确的特征参数, 为后续数据的反演解释提供了依据。目前JLMRS仪器数据处理软件中采用的数据滤波方法有自适应滤波法、FIR低通滤波法和滑动平均滤波法等[3, 4, 5, 6]。自适应滤波和FIR低通滤波方法均存在一定局限性, 当信号与噪声干扰频率相近时会造成有用信号的失真[7, 8]。滑动平均滤波其实是一个低通滤波的过程, 它的计算方法简单、易于实现。目前滑动平均滤波法中对于数据权值的选取是采用中间值最大, 向前向后递减的方式, 常规的选择是三角形分布, 但是三角形分布的权值只是根据一般规律给出, 并不精确[7, 8, 9]。
本文针对现有滑动平均滤波方法(以下称为三角形滑动平均法)中权值选取的不足[10, 11, 12], 提出了一种更为精确的权值确定方法— — 最小二乘权值方法。最小二乘权值法是提出一个多项式, 求取使多项式的值无限趋近于数据
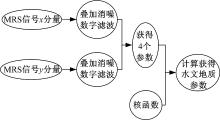
核磁共振野外采集到的数据含有大量噪声, 如果不进行消噪处理, 则不能准确提取信号的特征参数[13, 14]。针对仪器的野外测试信号, 首先对MRS信号进行消噪处理, 其中包括叠加消噪和数字滤波方法消噪, 之后提取MRS相应的信号特征参数:
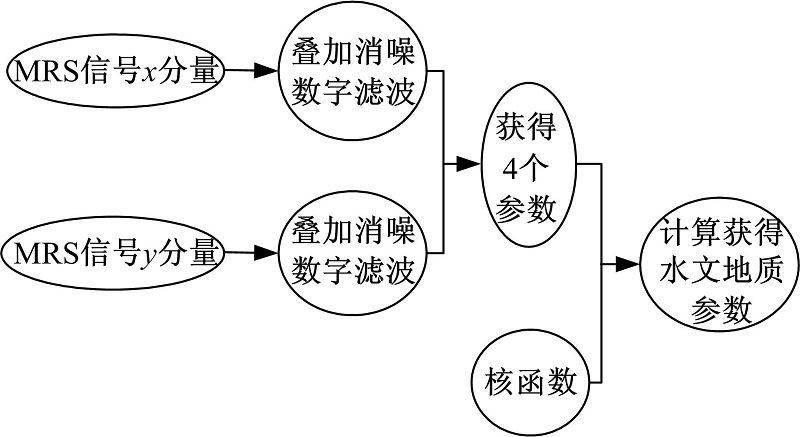 | 图1 MRS信号数据处理流程图Fig.1 Flow chart of MRS signal data processing |
MRS信号的特征参数经过反演可得到相应的水文地质情况。核磁共振数据参数与相应的水文地质参数的对应关系如表1所示。
| 表1 MRS数据参数与相应的水文地质参数对应关系 Table 1 Relation of MRS data parameters and corresponding hydrogeological parameters |
基于全波形采集的MRS信号检测器数据量大, 而核磁共振地下水探测方法则需要采用叠加的方法来消除噪声, 从而导致了仪器测量效率过低。
自由感应衰减信号(Free induction decay, FID)是MRS信号包络, 它包含了地下水探测的关键参数, 所以只需要获取FID信号即可, 这样既能够评价地下水信息, 也可以提高仪器的测量速度。核磁共振地下水检测技术中采用4倍频采样的数字正交技术来获得包络信号[15]。其MRS包络信号如式(1)所示:
式中:
一般MRS信号中的噪声分为3种:①工频噪声, 由电力线路产生, 其频率为50 Hz的整数倍; ②随机噪声, 分布在整个频率范围内; ③尖峰噪声, 幅度高出信号, 但是持续时间极短。
三角形滑动平均法主要适用于非平稳数据, 其权值的选取直接影响信号的平滑效果, 该方法的权值是根据一般规律给出的, 在中间选取最大权值, 因此该方法主要适用于随机噪声, 对尖峰噪声滤波效果不明显。最小二乘权值滑动平均滤波法(以下简称为最小二乘滑动平均法)改进权值的设置方式, 使之更为精确。最小二乘滑动平均法对噪声有较强的适应能力, 适应于随机噪声和尖峰噪声, 最小二乘滑动平均法可以采用不同的数据点个数和不同次方对信号进行拟合, 拟合阶数越高, 其平滑曲线与实测数据拟合得越好, 曲线越平滑, 消噪效果更为理想, 信号信噪比提高更多[16]。
目前核磁共振地下水探测技术中的三角形滑动平均法主要是在时间序列中某点前、后各取k个数据点, 进行滑动滤波, 滑动时在2k+1个数据点中间取最大权值, 然后向前、后对称递减, 采用三角形分布, 属线性递减。权值
式中:
对于2N+1组数据(xi, yi), 假设多项式
求目标函数的最小值, 分别对a0, a1, a2, …, ak 求偏导数, 对a0求偏导数, 可得如下结果:
同理对其他几项求偏导数, 结果如下所示:
式中:
令各偏导数为零, 可得:
式中:
由式(6)得矩阵方程组为:
式(7)右端变形为如下形式:
最终简化为如下形式:
由式(9)可以求解任意点数任意次方满足某种噪声滤波效果的最小二乘权值系数。需要指出的是, 2N+1对数据组, 最高次方只可取到2N次。
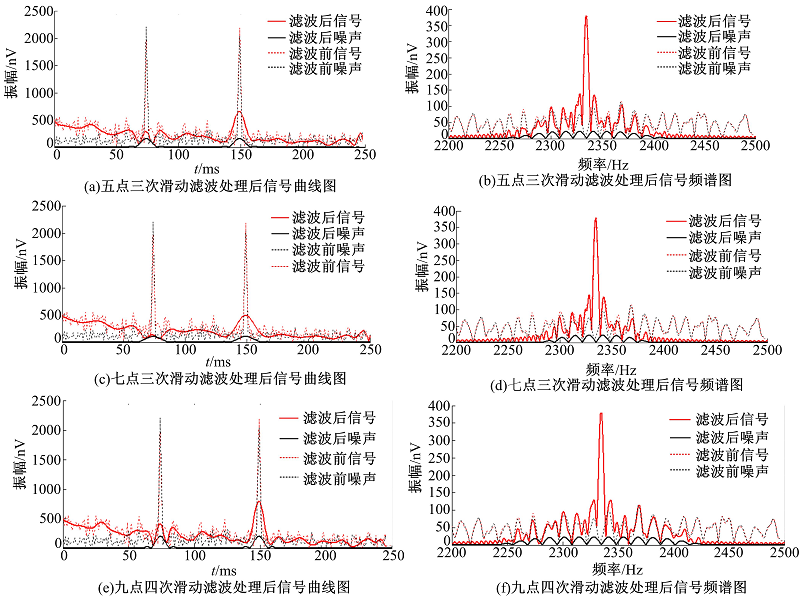
全波采集的核磁共振信号是一个衰减的正弦波, 但是数据量大、测量效率低。采用基于4倍频采样的数字正交FID弱信号检测技术, 采集到的核磁共振信号为包络曲线。模拟一个理想的核磁共振信号(见式(1)), 并加入干扰噪声来验证本文方法的有效性。MRS信号中常见的干扰噪声为工频噪声、随机噪声和尖峰噪声, 在理想信号中加入这几种噪声后进行最小二乘权值滑动平均滤波处理。通过比较任意点数、任意次方权值的最小二乘滑动平均法对上述噪声进行滤波处理的效果, 最终选择五点三次, 七点三次和九点四次这三种权值的最小二乘滑动平均法, 并与三角形权值滑动平均法的滤波结果作比较, 验证本文方法的可信性和可行性。
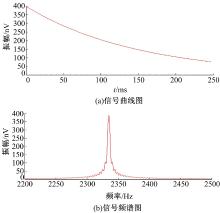
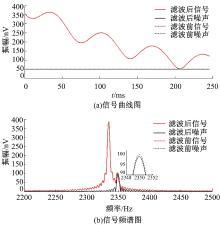
MRS理想信号包络和频谱图如图2所示, 其初始振幅
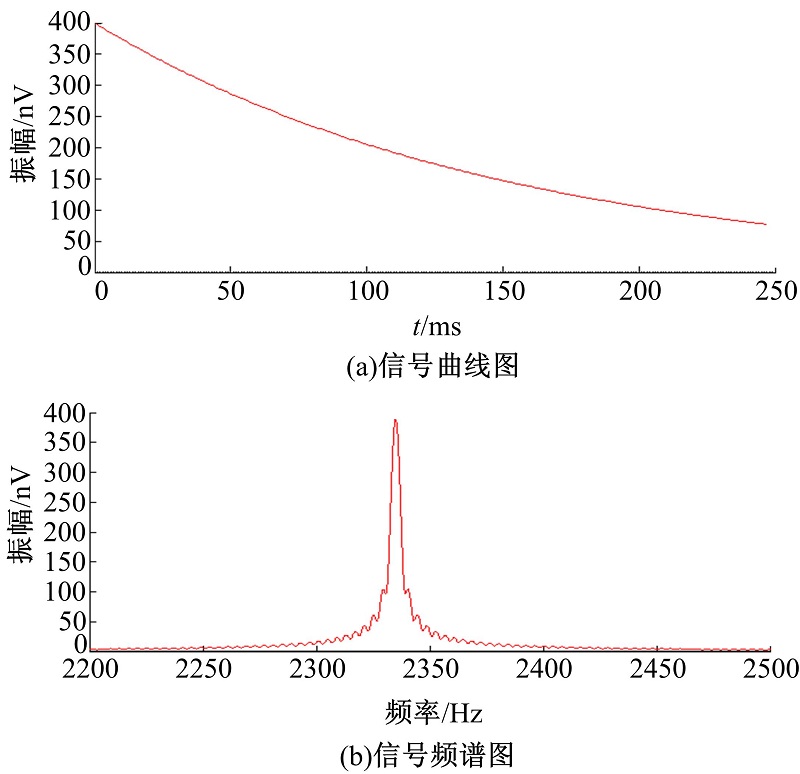 | 图2 理想信号包络和频谱图Fig.2 Ideal signal envelope and spectrum diagram |
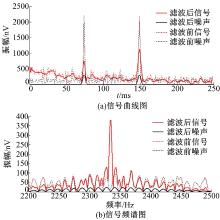
在理想信号中加入幅度为150 nV的随机噪声, 如图3所示。其信噪比为1.49, 且曲线的平滑度降低。
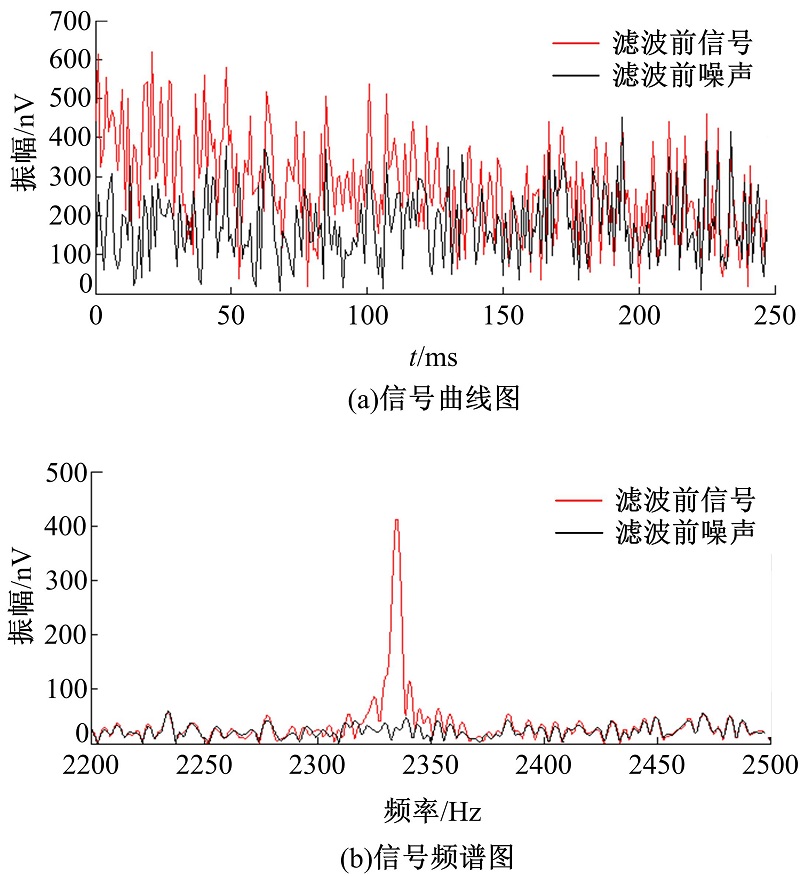 | 图3 理想MRS信号中加入随机噪声Fig.3 Ideal signal of MRS including random noise |
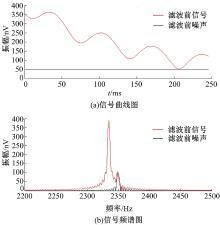
 | 图4 三角形滑动平均法处理后的信号曲线(加入随机噪声)Fig.4 Signal curve after triangle moving average processing (including random noise) |
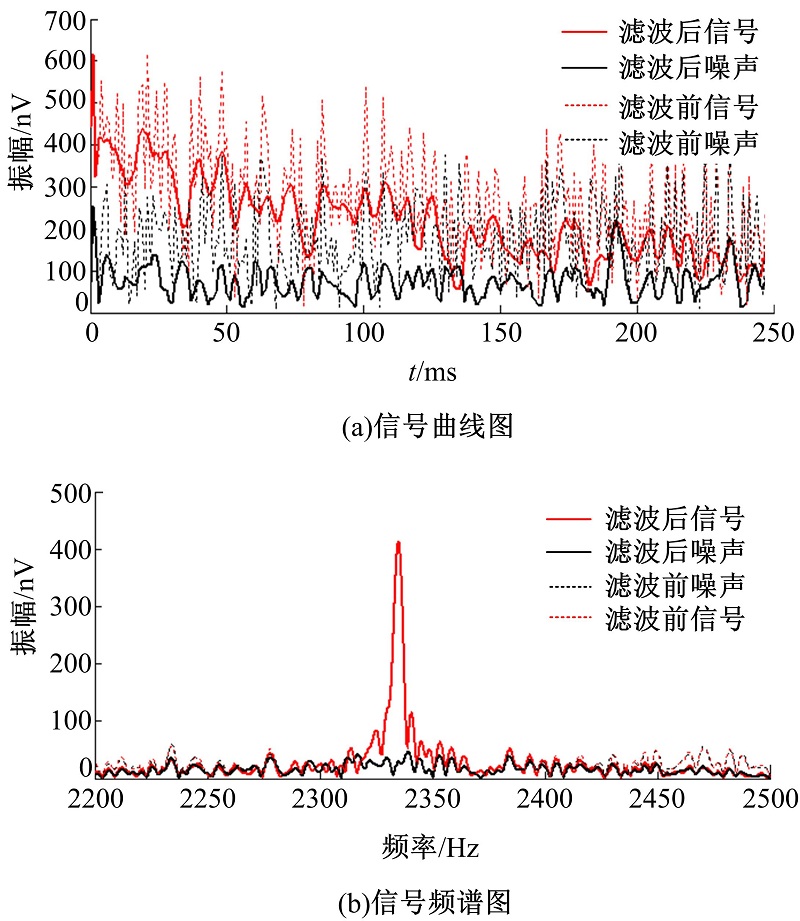
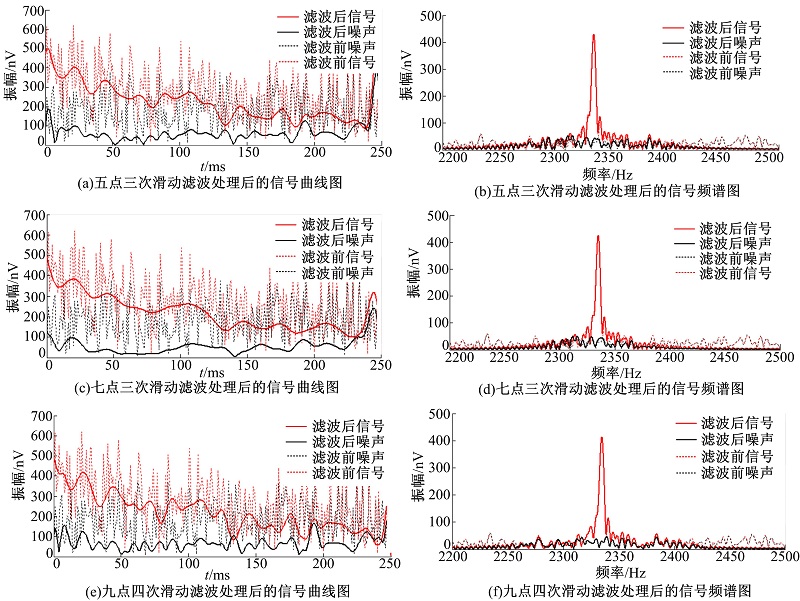
采用三角形滑动平均法处理后的信号曲线如图4所示, 其信噪比为2.72。从图4中可看出:信号与噪声明显地分离, 信号曲线变得比较平滑。采用最小二乘滑动平均法处理后的曲线如图5所示, 处理之后的信噪比可达到3.49。从图5中可以看出, 七点三次滑动滤波后曲线的平滑度最好。所以采用最小二乘滑动平均法进行滤波时要选取合适的权值。
综合图4和图5可以看出:最小二乘滑动平均法比三角形滑动平均法所得到的曲线平滑度要高, 且信号曲线与噪声曲线分离的效果好。
最后, 结合图5和表2可知:对于随机噪声, 两种滤波方法都可以很好地将噪声与信号分离开来, 但是最小二乘滑动平均法所得到的信号曲线更加平滑。表2中的数据更进一步证明了最小二乘滑动平均法的可信性。
 | 图5 经最小二乘滑动平均法处理后的信号曲线(加入随机噪声)Fig.5 Signal curve after by the least squares moving average processing(including random noise) |
| 表2 随机噪声情况下模型仿真数据经不同滤波方式处理后的参数提取结果对比 Table 2 Parameter extraction result contrast of random noise case model simulation data after different filtering method |
在理想信号中加入尖峰噪声和幅度为100 nV的随机噪声后的信号曲线如图6所示, 其信噪比为1.25。从图6中可以看出, 信号中混入了两个尖峰噪声, 其幅值都为1500 nV。
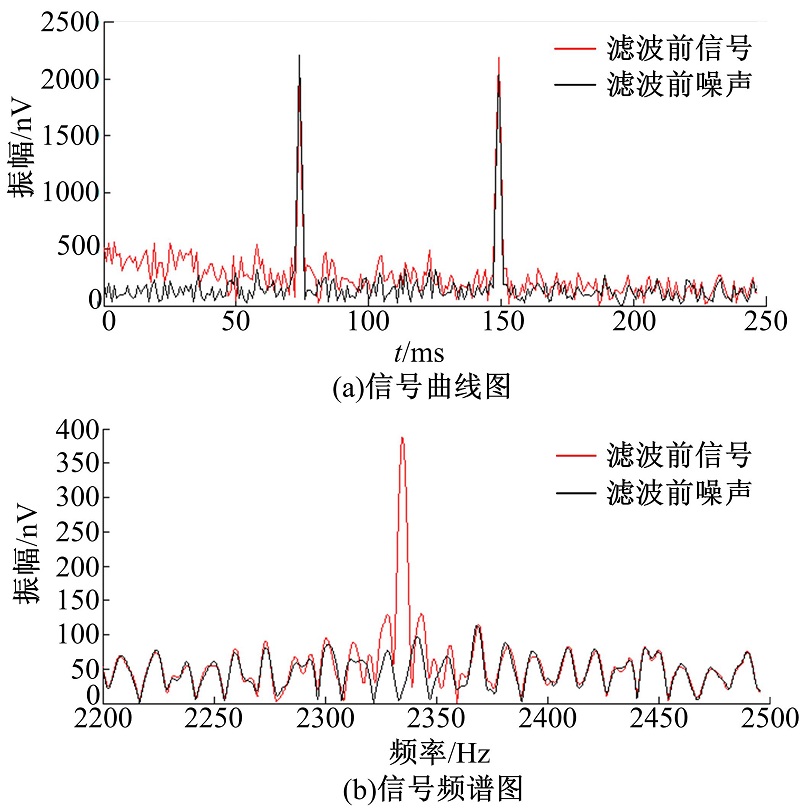 | 图6 理想MRS信号中加入尖峰噪声Fig.6 Ideal signal of MRS including peak noise |
采用三角形滑动平均法处理后的信号曲线如图7所示, 其信噪比为5.47。从图7中可以看出:噪声得到了明显的抑制, 信号曲线的平滑度得到了较好的改善。采用最小二乘滑动平均法处理后的信号曲线如图8所示, 处理之后的信噪比可达7.55。从图8中可以看出, 经七点三次滑动滤波方法处理后的曲线平滑度最好且噪声抑制得最好, 故选择合适权值的最小二乘滑动平均法对信号处理非常重要。结合图7和图8可以得出:最小二乘滑动平均法比三角形滑动平均法所得到的曲线平滑度要高且噪声得到了很好的抑制, 信号曲线与噪声得到了很好的分离。
 | 图7 三角形滑动平均法处理后的信号曲线(加入尖峰噪声)Fig.7 Signal curve after triangle moving average processing(including peak noise) |
 | 图8 经最小二乘滑动平均法处理后的信号曲线(加入尖峰噪声)Fig.8 Signal curve after by the least squares moving average processing(including peak noise) |
含有尖峰噪声的MRS信号经过不同滤波方法处理后得到特征参数的拟合误差、信噪比、频谱幅度衰减率如表3所示。经过最小二乘滑动平均法处理后特征参数
| 表3 尖峰噪声情况下模型仿真数据经不同滤波方式处理后的参数提取结果对比 Table 3 Parameter extraction result contrast of peak noise case model simulation data after different filtering method |
最后, 综合图8和表3可得, 对于随机噪声来说两种滤波方法都可以很好地抑制噪声。但是最小二乘滑动平均法所得到的信号曲线更加平滑, 最终信噪比可达到13.49, 七点三次的滤波结果最好。因此, 要选择合适的权值进行数据处理, 提高特征参数的提取精度。
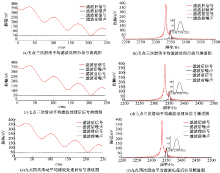
在MRS响应信号中加入频率为50 Hz, 幅值为50 nV的工频噪声, 分别采用三角形权值滑动平均法和最小二乘滑动平均法进行滤波处理。加入工频噪声后的信号包络和频谱图如图9所示, 加入噪声后的信噪比为4.39。
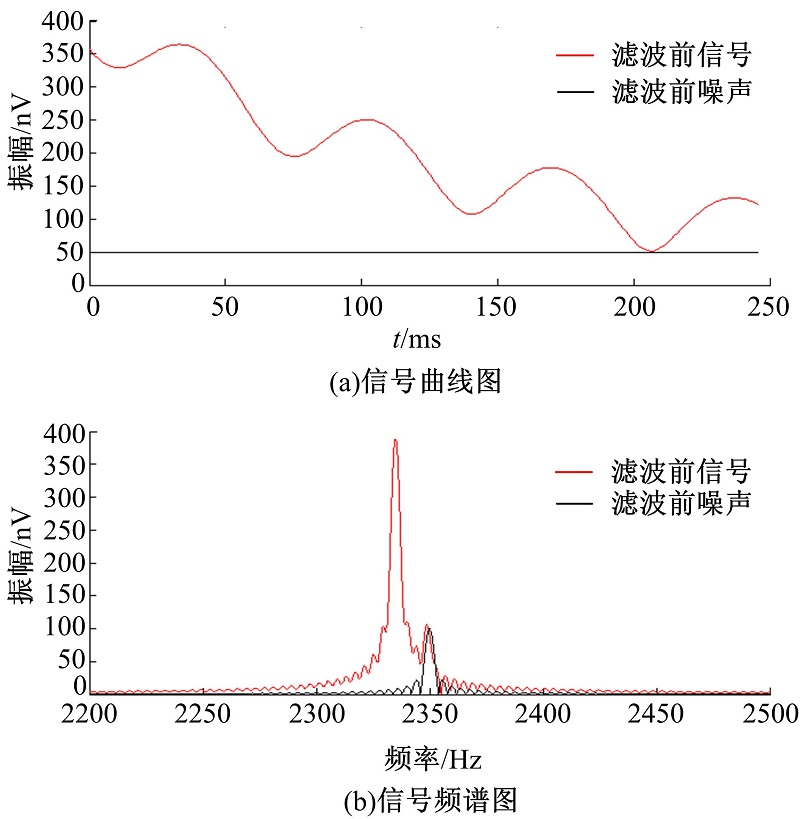 | 图9 理想MRS信号中加入工频噪声Fig.9 Ideal signal of MRS including frequency noise |
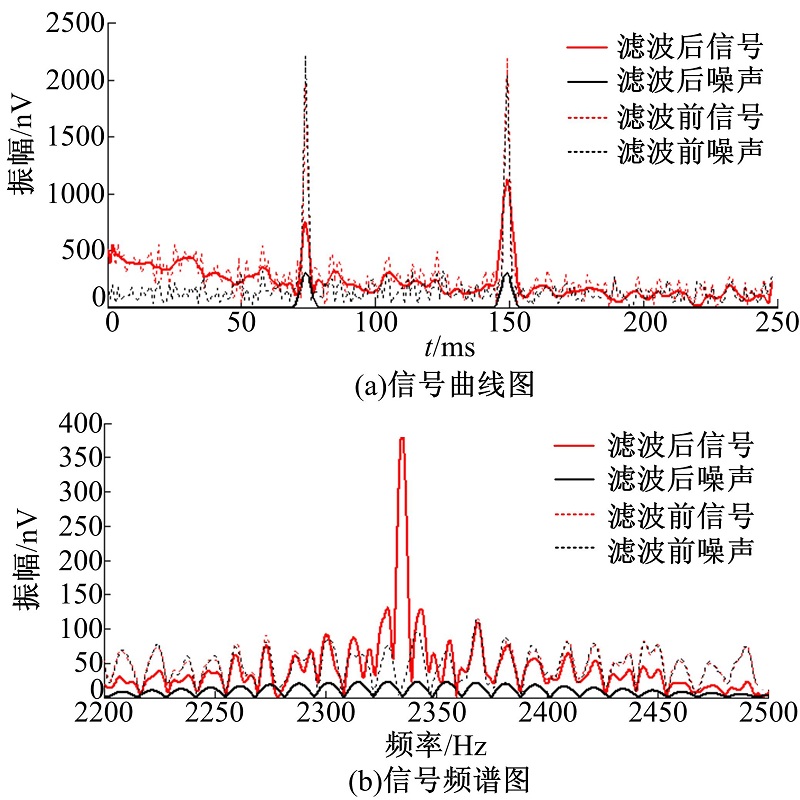
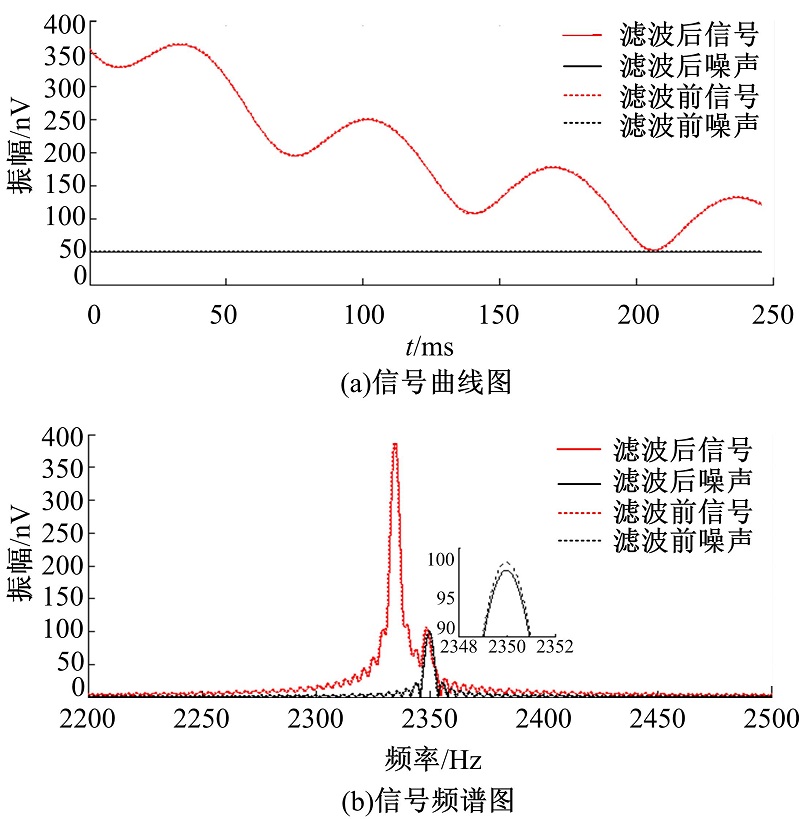
采用三角形滑动平均法处理后的信号曲线如图10所示, 处理之后的信噪比为4.44。采用最小二乘滑动平均法处理后的信号如图11所示, 处理之后的信噪比可达到4.5。
 | 图10 三角形滑动平均法处理后的信号曲线(加入工频噪声)Fig.10 Signal curve after triangle weight sliding filter processing |
 | 图11 经最小二乘滑动平均法处理后的信号曲线(加入工频噪声)Fig.11 Signal curve after by the least squares moving average processing(induding frequency noise) |
从图10和图11可以得到:含噪信号经过两种方法进行滤波后, 信号曲线的平滑度并没有得到改善。但最小二乘滑动平均法`比三角形滑动平均法所得到的信噪比有一定提高。
核磁共振含噪信号经过不同滤波方法处理后得到特征参数的拟合误差、信噪比以及频谱幅度衰减率, 如表4所示。从表4可以看出:不同权值的最小二乘滑动平均法与三角形滑动平均法所得到的特征参数的拟合误差、信噪比和频谱幅度衰减率得到了不同程度的提高, 且七点三次滑动平均法获取的效果最好。
最后, 结合图11和表4得出:对于工频噪声两种滤波方法效果不是很明显, 但是最小二乘滑动平均法仍然比三角形滑动平均法滤波效果有一定程度的提高。对于最小二乘滑动平均法不同权值所得到的结果是不同的。由表4可知:七点三次滑劝平均法的滤波效果最好, 故进行数据处理时要选取合适的权值。
| 表4 工频噪声情况下模型仿真数据经不同滤波方式处理后的参数提取结果对比 Table 4 Parameter extraction result contrast of frequency noise case model simulation data after different filtering methods |
为了验证最小二乘滑动平均法对于实测信号的滤波效果, 采用2005年4月作者所在核磁组在内蒙古某地野外试验的测试数据进行数据处理。
实际野外应用中, 针对某一地点的地下水测量, 一般需要仪器发射14~16个脉冲, 同时可以获得一组测试数据, 需要对每个测点的14~16个测试数据分别进行滤波处理, 提取信号的初始振幅、弛豫时间、初始相位等, 再进行水文地质参数的估算。
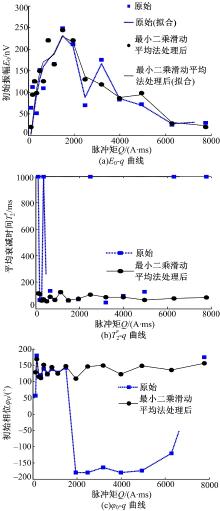
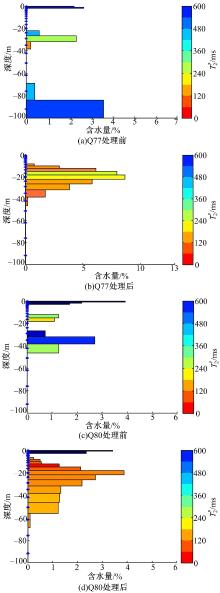
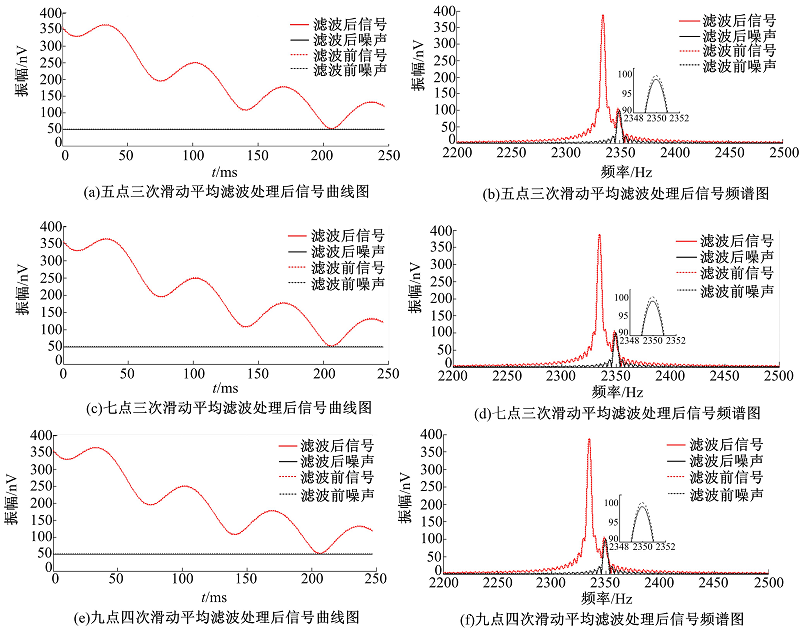
(1)测点Q77, 采用100 m× 100 m线圈, 当地的拉莫尔频率为2370 Hz, 噪声范围为2413~3660 nV, 对该测点共发射16个脉冲, 对16个测试数据进行滤波处理, 分别提取MRS信号的特征参数
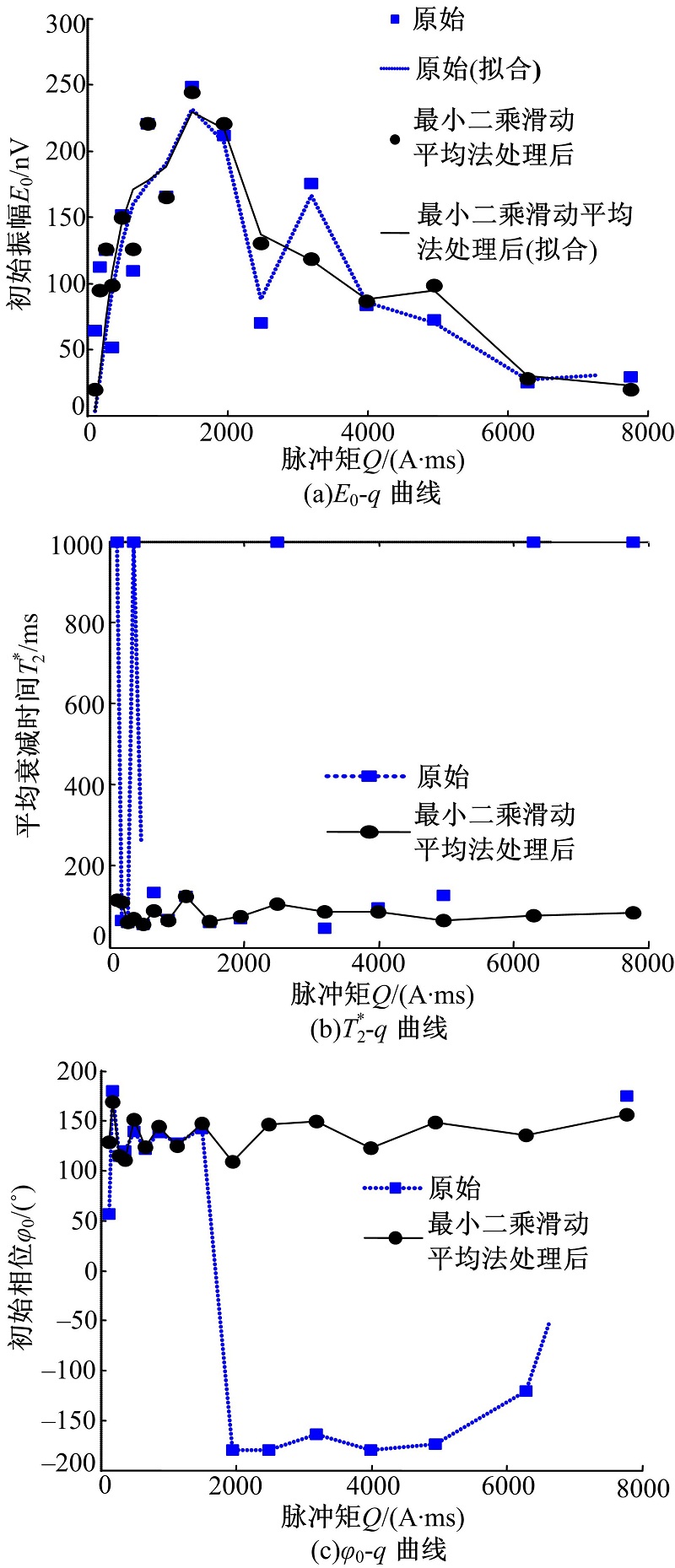 | 图12 Q77处理前后的MRS信号特征参数曲线Fig.12 MRS signal characteristic parameter curves before and after processing |
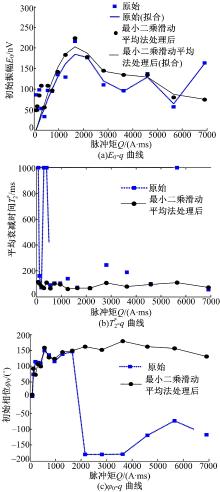
(2)测点Q80, 当地的拉莫尔频率为2367 Hz, 噪声范围为1992~3575 nV, 由该测点发射16个脉冲, 对16个测试数据进行滤波处理, 分别提取MRS信号的特征参数
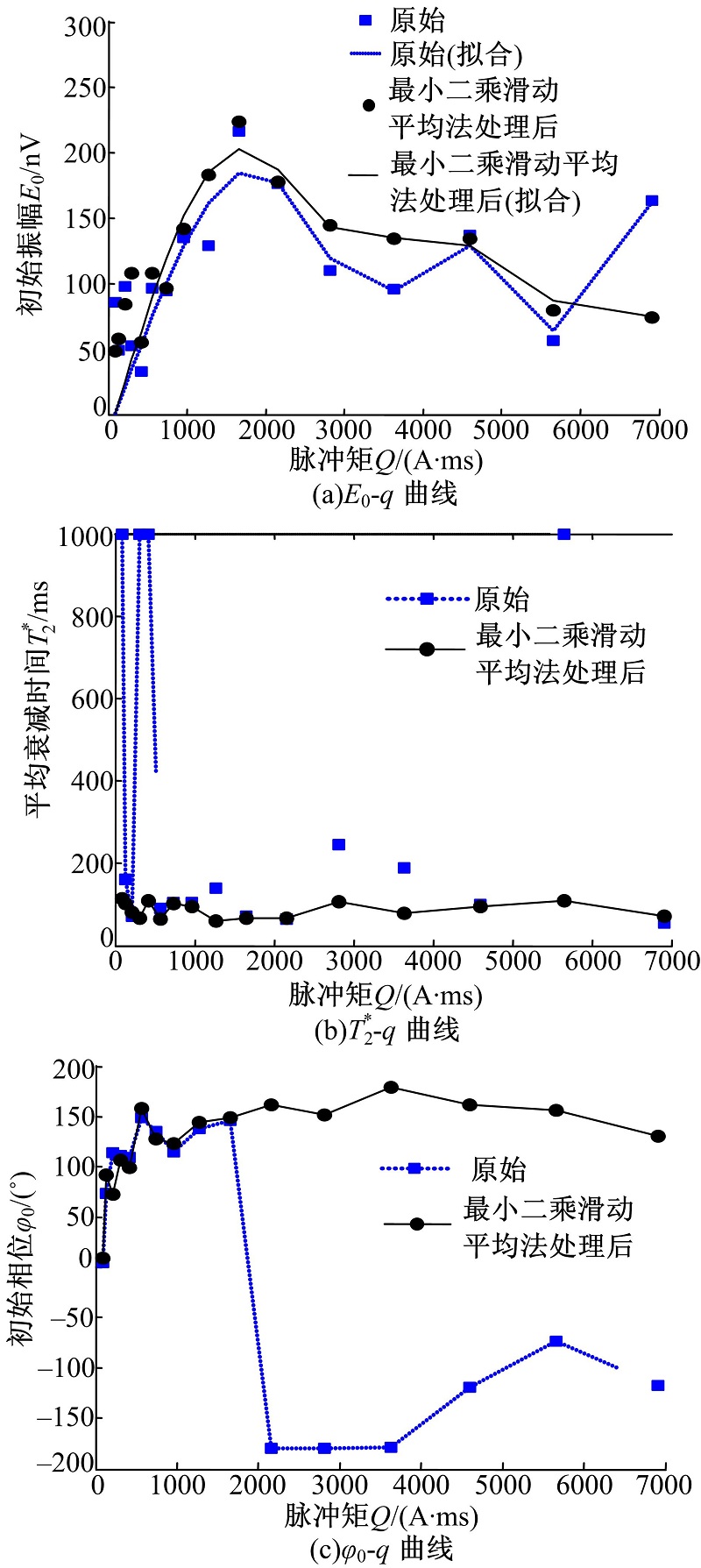 | 图13 Q80处理前后的MRS信号特征参数曲线Fig.13 MRS signal characteristic parameter curves before and after processing |
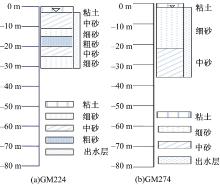
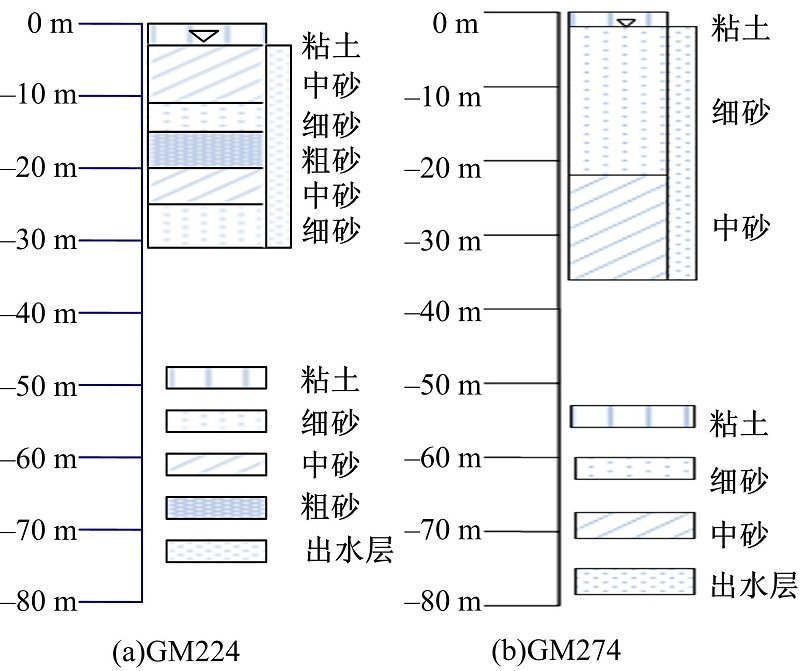 | 图14 打井点水文地质情况Fig.14 Drilling point hydrological geology |
打井点的水文地质情况如图14所示, 测点Q77距离打井点GM224为1.12 km, 测点Q80距离打井点GM274为2.82 km, 距离较近, 可近似认为测点与钻孔的水文地质情况相似。
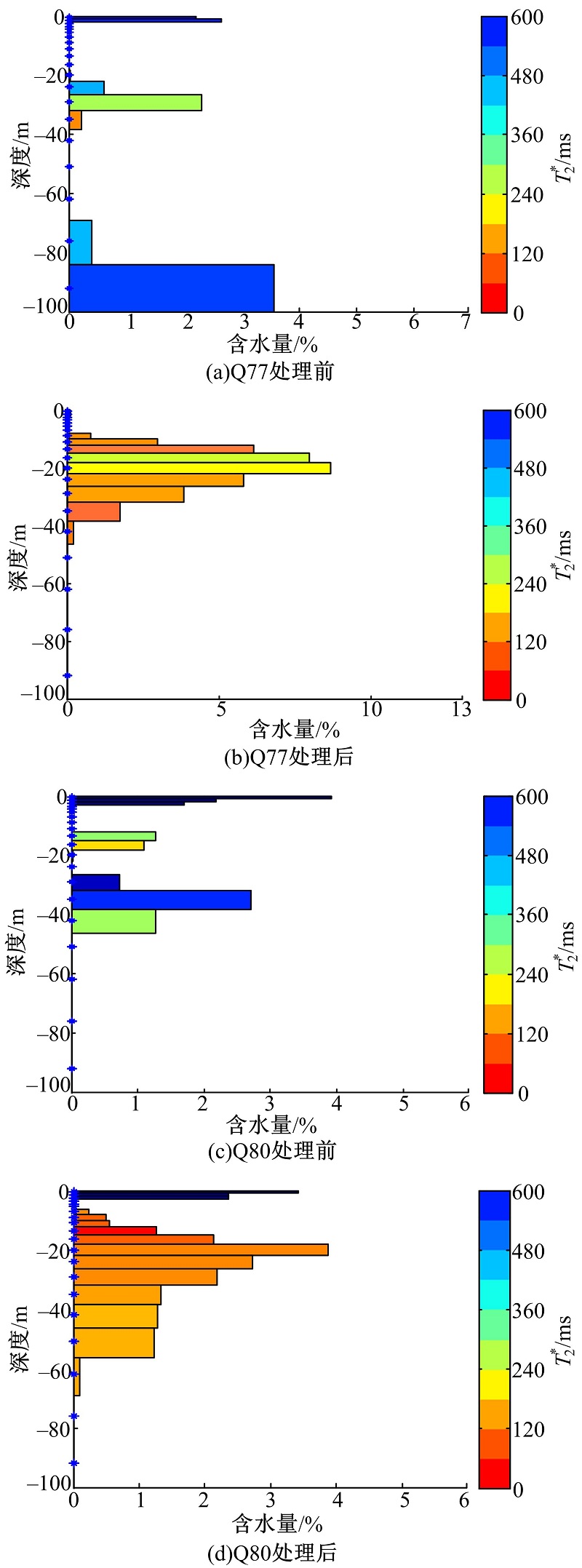 | 图15 Q77、Q80处理前后的含水量柱状图Fig.15 Point Q77 and Q80 inversion results before and after processing |
利用
提出了最小二乘滑动平均滤波方法, 利用优化方法确定了最小二乘权值系数, 并将该方法应用于含有电磁噪声的理想信号及实测信号的处理过程中, 得出以下结论:
(1)通过比较MRS信号中三种主要噪声的滤波效果后可知, 最小二乘滑动平均法更适合随机噪声、尖峰噪声的消除; 滤波处理后, 信号曲线的平滑度得到了改善; 信号的信噪比、特征参数的拟合误差、频谱幅度衰减率等都满足实际要求。
(2)最小二乘权值法优于三角形权值法, 仿真试验表明, 应选择适当的滑动点数进行消噪, 实测数据的处理结果也证明了该方法的可行性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|