


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于 H∞鲁棒SUKF算法的永磁同步电机转速观测器设计
[赵彬1, 2  , 郭孔辉
, 郭孔辉1 , 许男1 , 杨一洋1 ]
, 郭孔辉, 杨一洋|
|


作者简介:赵彬(1983-),男,博士研究生.研究方向:汽车系统动力学与控制,智能控制.E-mail:zhao_bin@mail.ccut.edu.cn
为了解决永磁同步电机定子电阻变化对速度观测的影响,利用 α-β坐标系下永磁同步电机非线性系统模型,引入 H∞鲁棒滤波算法增强观测器鲁棒性。为了解决sigma点计算量大的问题,采用超球体单形采样方法,提出一种新的非线性滤波器。最后设计了 H∞鲁棒球形无迹卡尔曼滤波观测器对永磁同步电机转速进行状态观测。当永磁同步电机定子电阻变化时,对比分析了 H∞鲁棒球形无迹卡尔曼滤波器与无迹卡尔曼滤波器、球形无迹卡尔曼滤波器在相同系统噪声和量测噪声时电机转速误差方差。 H∞鲁棒球形卡尔曼滤波器的转速误差方差接近7 rad/min,明显小于后两者观测器观测值(40、20 rad/min)。
In order to solve the influence of stator resistance variation of permanent magnet synchronous motor on velocity measurement, by using a nonlinear system model of permanent magnet synchronous motor in α-β coordinate, the H∞ robust filtering algorithm is introduced to enhance the robustness of the observer. To solve problem of large calculating number of sigma points, a new nonlinear filter is proposed using the method of single sampling of the sphere. A H∞ robust spherical unscented Kalman filter observer is designed to observe the velocity state of the permanent magnet synchronous motor. When the permanent magnet synchronous motor stator resistance changes, the motor velocity error variances of the H∞ robust spherical unscented Kalman filter, unscented Kalman filter and spherical unscented Kalman filter are compared and analyzed under the same system noise and measurement noise. The speed error variance of the H∞ robust spherical unscented Kalman filter observer is close to 7 rad/min, which is much less than that of the other two observers, which are close to 40 rad/min and 20 rad/min respectively.
永磁同步电机(PMSM)[1]转速观测状态方程常采用电流模型或者磁链模型, 二者都具有较强的非线性, 观测器的设计通常采用扩展卡尔曼滤波器或滑膜变结构进行估计[2]。文献[3]介绍了卡尔曼滤波算法的特点, 文献[4, 5, 6]对卡尔曼滤波算法在PMSM转速观测器中应用做了详细介绍。但是由于扩展卡尔曼滤波器是通过线性化处理来实现非线性滤波, 计算时需对原非线性系统Taylor展开, 并忽略高阶项, 得到局部近似的线性系统, 达到最小方差意义上的次最优估计, 此时如果高阶项无法忽略, 就会产生高阶截断误差, 降低估计精度; 同时扩展卡尔曼滤波器要求对原系统求取雅可比矩阵, 在实际使用时, 有些模型很难求得雅可比矩阵[7], 降低了使用范围。无迹卡尔曼滤波算法用无迹变换逼近非线性分布, 使非线性统计计算精度至少达到2阶, 提高计算精度。然而该方法需要计算
为了克服参数变化对观测值影响, 增加系统鲁棒性能, 本文将球形无迹变换(ST)[8]、无迹卡尔曼滤波器(UKF)[9]与非线性
1
1.1 非线性
假设标准的线性离散系统:
式中:
定义代价函数:
式中:
1.2 非线性
球形无迹卡尔曼滤波器是线性的, 为了将
为了降低非线性系统线性化带来的误差, 采用无迹卡尔曼滤波算法, 相比非线性系统线性化方法, 该算法具有更小的线性化误差。无迹卡尔曼滤波算法步骤如下:
(1)初始化滤波器
(2)时间更新
假设系统由
式中:
(3)在计算得到
(4)状态变量的预估协方差值和预估状态值计算由加权平均法得到。权值具体计算方法为:
式中:
(5)对系统的输出方程进行
可以通过量测函数得到输出量的预估:
同时, 预估观测值及其方差、协方差分别为:
(6)按下式更新增益、均值和协方差:
式中:
通过式(20)(21), 可以得出当前时刻系统状态变量和状态变量协方差的估计值。至此UKF算法完成当前时刻状态变量的一次更新, 输出状态
根据无迹变换定义, 无迹变换需要
(1)选择权系数
(2)其余的权系数为
(3)初始化一元向量
对于
式中:
(4) 球形无迹变换sigma点为:
根据球形无迹变换
H∞ 鲁棒球形无迹卡尔曼滤波器具体实现方法如下:
(1)根据式(3)(4)初始化滤波器, 初始化过程噪声和量测噪声方差
(2)按照式(25)计算
(3)最后通过式(19)(20)计算
5
本文基于隐极式永磁同步电机
式中:
图1为状态观测器和永磁同步电机直接转矩控制结构图, 系统采用双闭环调速系统, 其中外环为转速环(ASR), 内环为电流环(ACR)。设定电机转速信号
 | 图1 状态观测器和永磁同步电机直接转矩控制结构图Fig.1 State observer and direct torque control of per-manent magnet synchronous motor structure |
仿真中初始状态
假定无迹卡尔曼滤波器、球形无迹卡尔曼滤波器与
电机实际转速曲线、无迹卡尔曼滤波器、球形无迹卡尔曼滤波器和
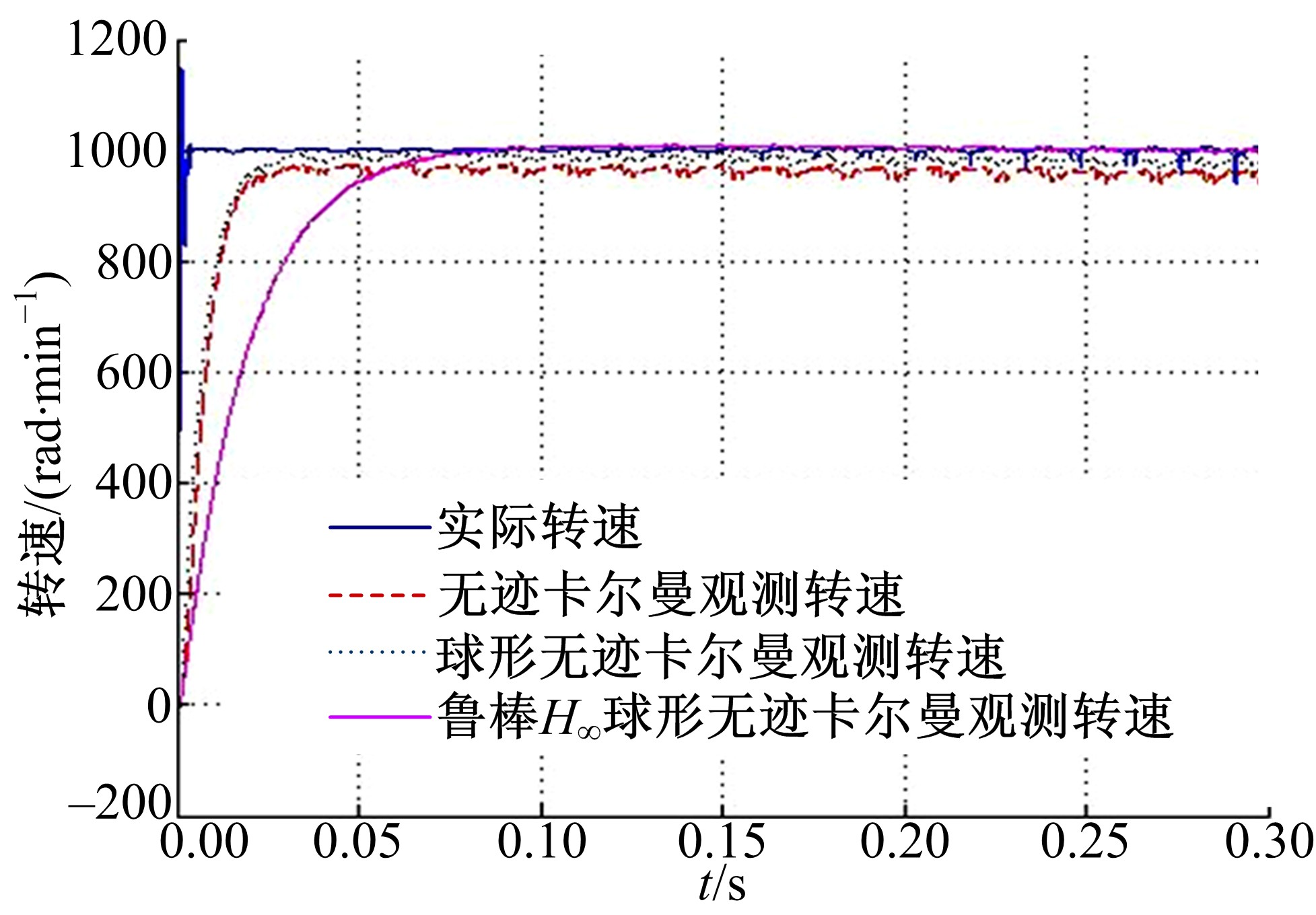 | 图2 转速观测曲线Fig.2 Speed observation curve |
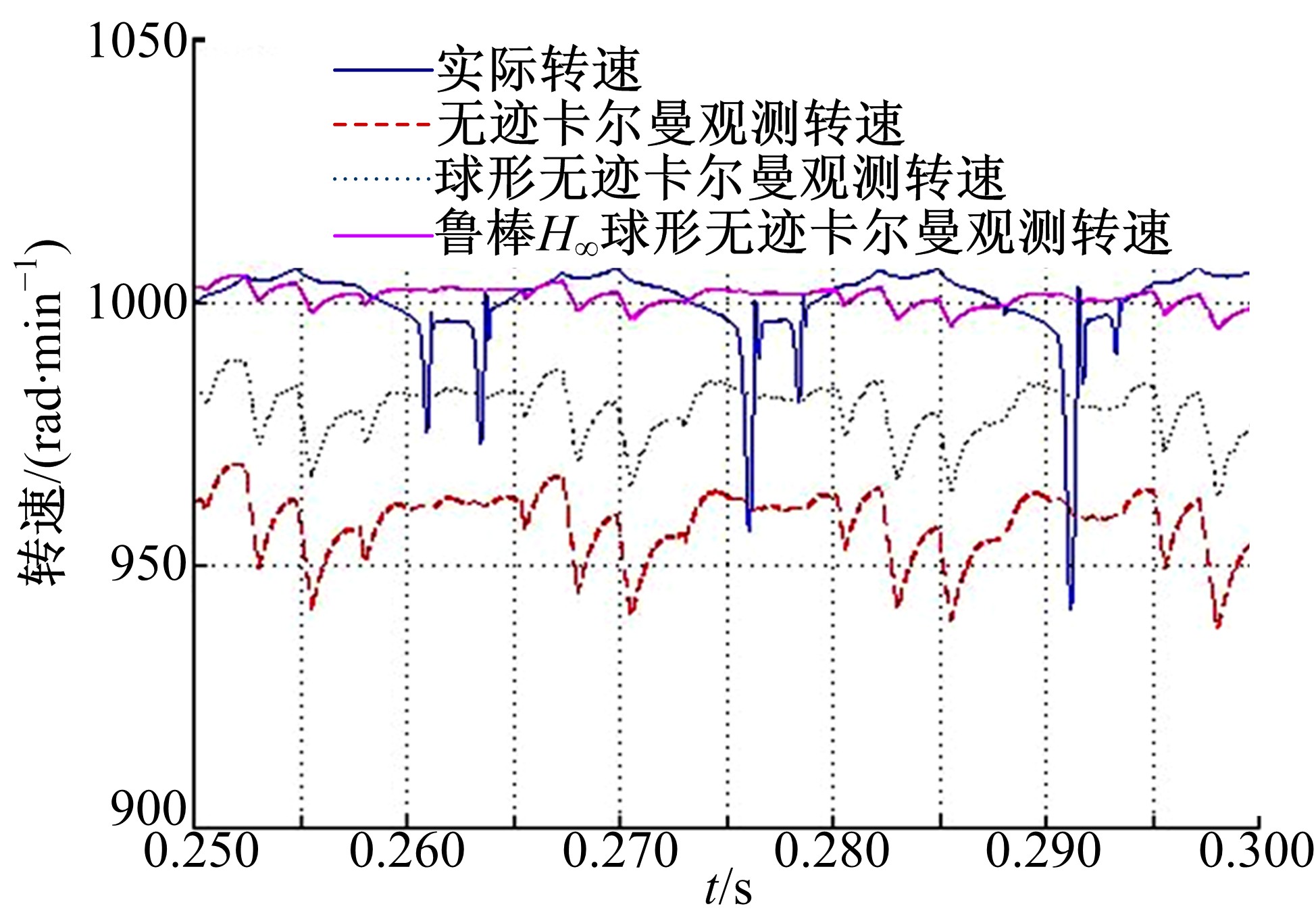 | 图3 局部稳态波形曲线Fig.3 Partial steady wave curve |
 | 图4 转速误差曲线Fig.4 Speed error curve |
从图2~图4可以看出, 系统设定转速为1000 rad/min, 达到稳态值时, 实际转速存在波动, 分析原因是直接转矩控制依赖定子电阻, 定子电阻的量测值与真实值存在误差, 故转速波动。同时, 无迹卡尔曼滤波器和球形无迹卡尔曼滤波器在稳态时观测转速均出现较大振荡, 系统误差曲线表明二者的观测误差较大, 而
在电机实际运行时, 定子电阻随温度变化而变化, 为了验证
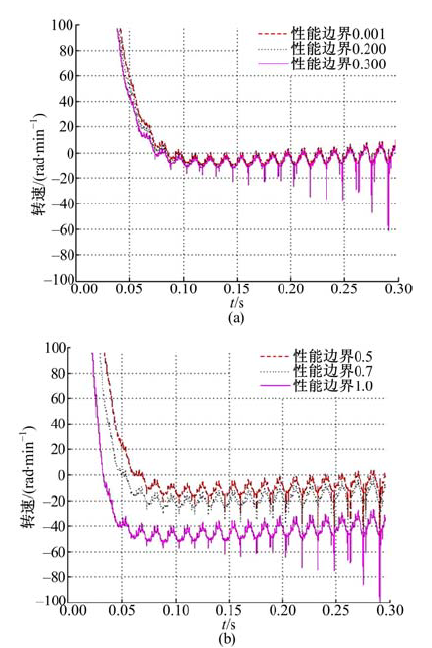 | 图5 不同边界性能的转速误差曲线Fig.5 Speed error curve of different boundary properties |
| 表1 不同性能边界θ 误差均方根值 Table 1 Performance of different boundary error RMS |
从表1可以看出, 在
(1)
(2)
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|