







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
诊断算法在混合动力汽车能量管理策略中的集成开发
[曾小华1  , 蒋渊德
, 蒋渊德2 , 宋大凤1 , 彭宇君2 , 杨南南2 ]
, 蒋渊德, 彭宇君|
|


作者简介:曾小华(1977-),男,教授,博士.研究方向:混合动力系统.E-mail:zeng.xiaohua@126.com
在混合动力汽车前期开发的能量管理策略的基础上,提出了一套基于混合动力汽车能量管理策略的诊断算法集成方案。该方案在能量管理策略的基本架构中分别集成故障检测、故障确认、故障识别、部件故障等级划分和容错控制。为验证该方案的有效性,基于Cruise软件平台下搭建整车模型,同时在Matlab/Simulink中搭建系统算法进行仿真实验。硬件在环仿真结果表明,本文集成方案实现了能量管理策略与故障诊断算法的无缝连接,在有效检测故障的同时实施相应的容错控制。
An integration scheme is proposed to effectively integrate fault diagnosis algorithm into energy management strategy for hybrid electric vehicle. In this scheme, the fault detection, fault recognition, fault identification, fault rank division and fault tolerance control are integrated into the general energy management architecture. In order to verify the effectiveness of the proposed scheme, a fault diagnosis algorithm-integrated energy management strategy is established using MATLAB/Simulink combined with models constructed by Cruise software. Hardware-in-the-loop simulation results show the fault diagnosis algorithm-integrated energy management strategy can detect the vehicle faults and apply fault tolerance control accordingly. Meanwhile, the fault diagnosis algorithm and energy management strategy are effectively coordinated.
近年来, 混合动力汽车以其低油耗、低排放、续航里程长和生产成本相对较低等优势, 成为了国际汽车界的研究热点[1, 2]。然而, 混合动力汽车作为一个复杂的机电耦合系统, 其潜在故障较多。为提高车辆可靠性, 常采用多种硬件措施来降低汽车故障率, 如将电气系统中使用的线束做的尽可能短, 采用熔丝、断电器以及高分子正温热敏电阻(PPTC)电路等来保护设备[3]。另外, 故障自诊断已成为新车研发中的一项重要内容, 能够明显提高汽车可靠性。为了提高混合动力汽车的安全性和可靠性, 关于混合动力汽车诊断技术的研究也越来越多, 典型的研究包括对混合动力汽车电池系统的诊断[4]、逆变器的诊断[5]、DC-DC的故障检测[6]、电机的故障检测[7]、驱动电机容错控制[8]等。
通过研究混合动力汽车能量管理策略的架构可知, 混合动力汽车的能量管理策略一般可以划分为信号输入、信号处理、模式选择、行车控制和信号输出等主要模块。在混合动力汽车控制策略开发过程中, 通常先重点进行能量管理算法的研发, 随着开发工作的不断推进, 后续才会加入诊断算法[9]。这时, 在保证不影响已有的能量管理策略正常工作和尽可能减小对前期控制策略改动的前提下, 如何实现车辆在异常情况下的故障诊断和容错控制尤为重要。实际中, 后续添加诊断算法时常常需对控制策略做较大的改动, 降低了开发效率。混合动力汽车故障诊断算法能够显著提高汽车可靠性, 确保行车安全, 它通常包括故障检测、故障确认、故障识别、部件故障等级划分和容错控制等。
本文从混合动力汽车能量管理策略的一般架构出发, 研究故障诊断算法, 并将二者集成。该集成方案具有一定的可重复性, 可应用于其他型式的混合动力汽车(或其他节能与新能源汽车)能量管理控制策略的开发。
通常将混合动力汽车构型分成串联式、并联式和混联式3种, 由于每种构型的结构不同, 所适用的能量管理策略也有较大差异。但是, 每种构型的混合动力汽车都具有两种或两种以上的动力源, 通过控制各种动力源可形成多种工作模式, 各模式之间的运行特点和宜采取的控制策略会有很大区别。混合动力汽车的能量管理策略通常可以划分为如下5个主要模块。
(1)信号输入模块:用于采集整车状态的关键参数和驾驶员输入信号, 当控制策略用于硬件在环或者实车调试时, 本模块主要包括CAN、A/D等各种底层接口的搭建。
(2)信号处理模块:用于确保输入到控制器的信号可靠, 常在这一部分中对信号进行整形滤波处理、抗干扰处理和输入参数检测处理等。
(3)模式选择模块:用于对各个状态进行综合仲裁, 判断车辆当前的行驶工况, 然后进行混合动力汽车各个行驶模式的选择。具体包括模式切换条件的制定和模式切换的管理。
(4)行车控制模块:此模块是混合动力汽车控制策略的核心部分, 用以计算汽车的整车需求功率、需求转矩等参数; 并根据汽车运行模式控制车辆当前行驶状态。
(5)信号输出模块:将获得的各控制信号进行整理, 并输出到控制器和相应的执行机构。
混合动力汽车是一个复杂的机电耦合系统, 电池、发电机及驱动电机等元件的引入使得混合动力系统的可靠性要低于传统汽车, 存在较多的潜在故障。为确保混合动力汽车发生故障后仍能够安全行驶, 同时便于车辆的故障检修, 混合动力汽车的诊断系统主要分为如下6个部分:
(1)故障检测:依据混合动力构型和控制策略的特点, 分别采用合适的算法对混合动力汽车运行过程中可能出现的各种故障进行检测。
(2)故障确认:采用合理的方法对故障进行确认, 排除由于信号干扰等造成的警报, 避免不必要的容错控制。
(3)故障识别:依据故障确认结果判断故障的严重程度。
(4)部件故障等级划分:将故障依严重程度分为多个等级, 根据故障识别结果判定部件的故障等级。
(5)容错控制:根据故障识别和部件故障等级划分结果分别进行相应的容错控制, 确保车辆安全行驶, 提高混合动力系统的可靠性。
(6)故障表征:根据故障确认、故障识别、部件故障等级分析的结果进行故障代码的编写、存储, 并点亮仪表盘故障指示灯提醒驾驶员。
其中(1)~(4)可视为信号处理部分; (5)用于保障系统的可靠性和行驶的安全性, 混合动力汽车系统中有多种容错设计, 其目的是当汽车遭受到局部故障或失效后, 诊断系统能准确检测出发生的故障, 并使汽车可以继续正常行驶; (6)用于显示故障发生位置、严重程度等, 用于提醒驾驶员汽车的当前运行状态, 以便及时进行故障检修。
为保证混合动力汽车在各工作模式下的可靠性及行驶安全性, 基于混合动力汽车能量管理策略的一般架构研究诊断算法的集成方法, 从而使集成方案具有一定的可移植性。
在能量管理策略一般架构的基础上, 实现故障诊断算法在能量管理算法中的集成, 集成方案原理见图1。
如图1所示, 以一般架构的原有能量管理算法(粗线框所示)为基础, 将诊断算法进行集成。其中, 信号输入和信号输出模块中只是增加了考虑故障诊断算法后的输入输出接口, 故本文不作赘述。
 | 图1 故障诊断算法在能量管理策略中的集成原理Fig.1 Scheme of integrating fault diagnosis algorithm into energy management strategy |
如图1所示, 在原有信号处理模块中集成了信号的故障检测、故障确认、故障识别和信号容错。其中, 故障检测会对系统的有效性、可靠性和合理性产生直接影响。混合动力汽车各种故障之间有不同的特点, 适宜采取的检测算法也不相同, 需针对混合动力汽车不同部件, 制定出相应的检测算法。常见的有逻辑门限、模糊逻辑、小波分析和模糊神经网络检测等, 这些诊断算法和本文集成方案都有很好的适应性, 都可集成到当前能量管理策略中。在实际应用中, 可依据各检测算法的应用范围将多种故障检测算法集成于故障诊断-能量管理集成控制策略中。在集成过程中, 可依据下列内容确定各检测算法的适用范围:
(1)逻辑门限检测:就是通过检测当前信号值与预设门限值之间的大小关系来进行故障检测。具有算法简单、可靠性高、实时性强等优点。适用于对电子油门、车速、发动机转速/转矩、电机转速/转矩等实时性要求特别高的信号进行故障检测。
(2)模糊逻辑检测:是一种智能检测算法, 适用于检测难以用数学方法检测的故障, 如电机负荷、电机过热状态、电池过热状态等。
(3)小波分析检测:用于在频域内检测车辆故障, 适用于检测在时域内难以发现的故障, 如传动轴断裂。
(4)模糊神经网络检测:利用神经网络具有推测、联想、记忆、自组织学习等特点来进行故障诊断, 适用于检测故障征兆与故障原因之间的映射关系异常复杂的故障类型, 如检测故障的严重程度。
在信号处理模块中进行故障诊断算法集成时, 主要分为基于单个信号和基于多个信号两种类型。
3.1.1 基于单个信号的诊断算法集成
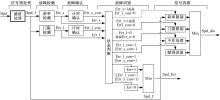
基于单个信号的诊断算法集成指的是, 根据信号本身的特征对该信号的状态进行诊断。以发动机转速信号故障诊断的集成为例介绍单个信号的诊断算法集成原理, 如图2所示。
 | 图2 信号处理模块中的单信号集成原理Fig.2 Single signal integration principle in signal processing module |
如图2所示, 在保留原有信号预处理(即滤波处理)的基础上, 首先对发动机转速信号分别进行了斜率、门限检测; 接着对检测后得到的故障状态信号进行了基于计时的故障确认; 然后根据故障确认得到的信号进行故障的识别, 并输出信号的故障状态, 用于后续故障代码的编写和存储; 最后, 依据故障识别的结果进行不同情况下的容错控制。其中, 基于计时的故障确认策略可按以下步骤进行[10]:
(1)定义变量count1、count2, 并赋初值0; 获取当前经过滤波处理的发动机转速信号值Spd_f, 分别经过斜率检测和门限检测后得到其故障状态Err_s、Err_l。
(2)若故障状态Err_s=1或Err_l=1, 相应地对count1或count2加1, 否则不做处理。
(3)当count1或count2超过设定阈值时, 得到故障确认状态值Err_s_con=1或Err_l_con=1。
依据上述集成方案搭建的Simulink模型如图3所示。
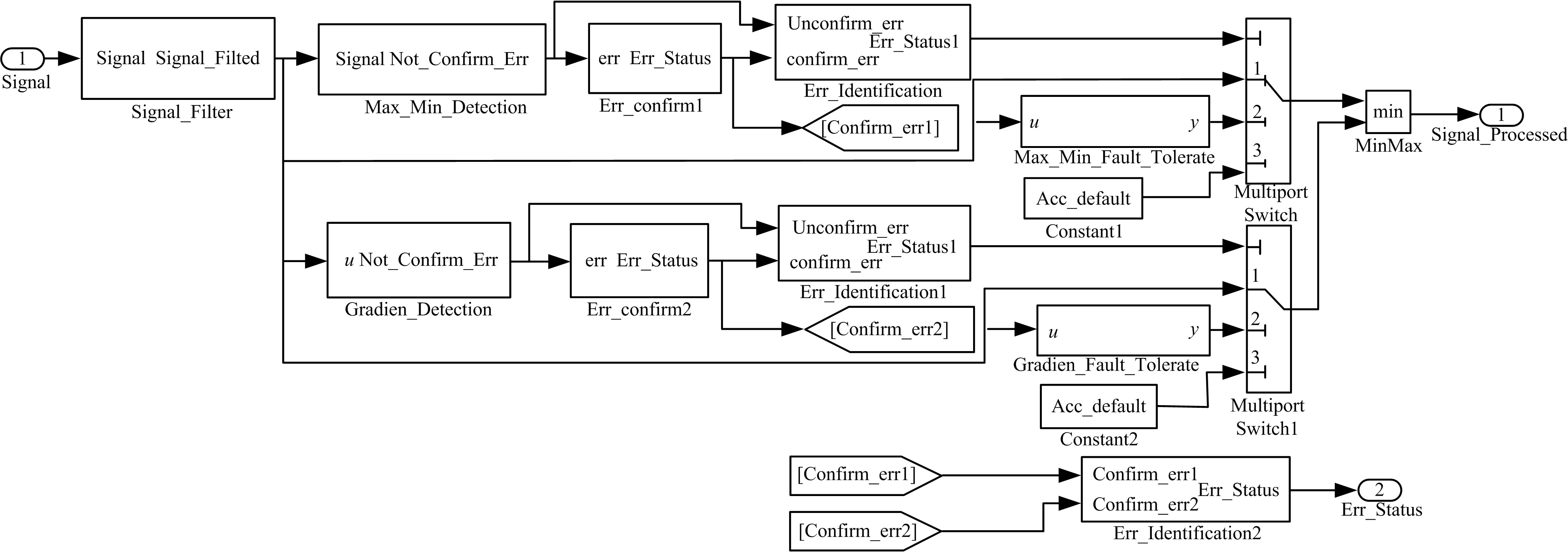 | 图3 单信号集成的Simulink模型Fig.3 Simulink model of single signal integration principle |
3.1.2 基于多信号间逻辑关系的诊断算法集成
基于多个信号间逻辑关系的诊断算法是建立在单个信号诊断的基础上的, 因此不再涉及信号的容错控制, 其输出的仅为故障状态, 该故障状态用于后续的部件或者系统的容错控制。以电机工作状态故障诊断的集成为例, 介绍多个信号的诊断算法集成原理, 如图4所示。
混合动力汽车特定的工作模式与其电机的工作状态相对应。如图4所示, 首先, 根据混合动力汽车当前的工作模式和电机的工作状态之间的逻辑关系来进行故障检测; 然后, 分别进行故障确认与故障识别, 最终输出故障检测的结果用于故障代码的存储和编写。依据上述集成方案搭建的Simulink模型如图5所示。
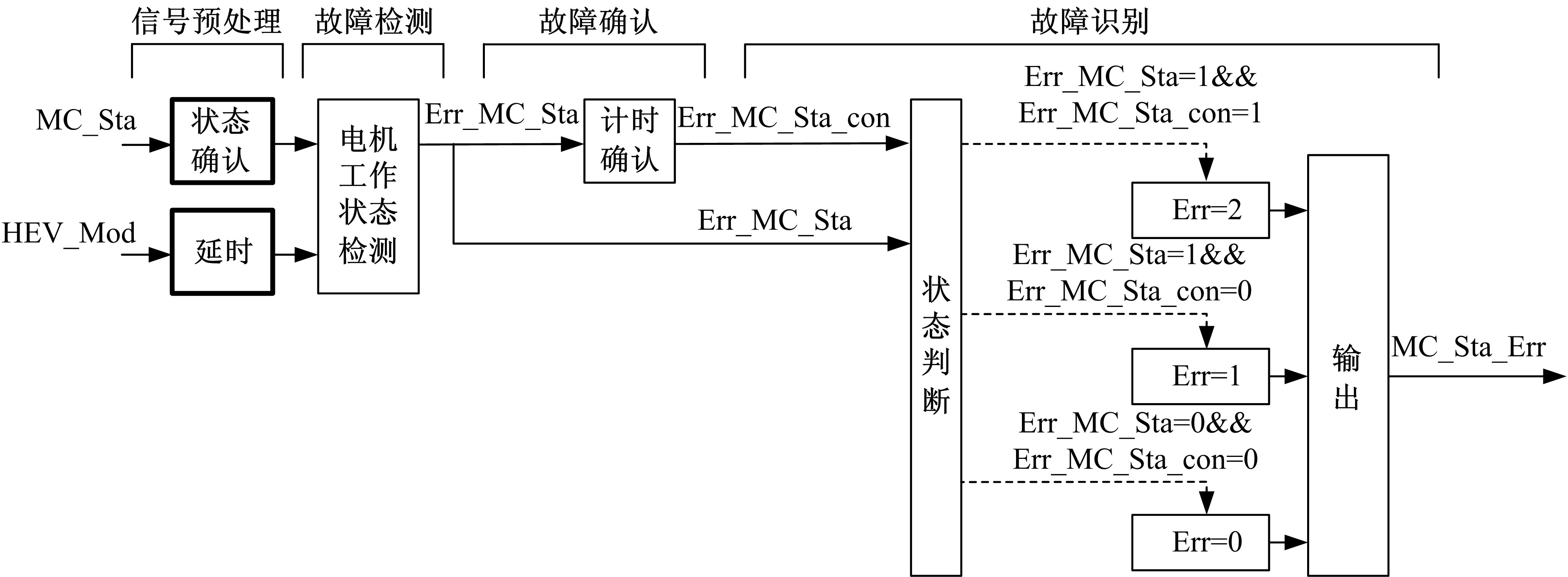 | 图4 信号处理模块中的多信号集成原理Fig.4 Multiple signals integration principle in signal processing module |
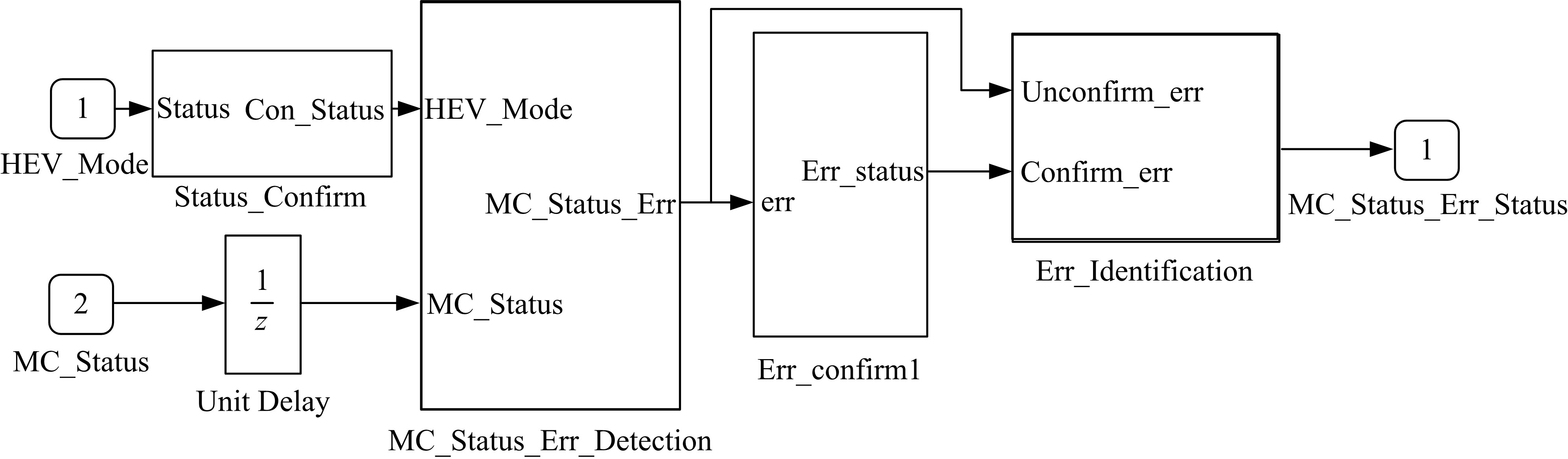 | 图5 多信号在信号处理模块中的集成Fig.5 Simulink model of multiple signals integration principle |
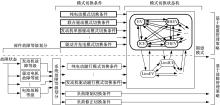
模式选择模块中的集成原理如图6所示, 在原有能量管理策略(粗线框所示)的基础上考虑了故障情况, 进行了集成与修改。
如图6所示, 在得到部件故障等级和系统故障等级后, 对原有能量管理策略的模式切换条件进行补充和修正。此时, 需要根据原有控制策略和故障诊断结果确认混合动力汽车的行驶模式, 车辆可能会增加某些运行模式, 如图中的纯电动跛行模式LimEV、纯发动机跛行模式LimICE以及停车模式等。在进行容错控制集成时, 根据车辆当前的系统故障等级对原有的能量管理策略中的模式切换条件进行补充和修改时, 需遵循如下4点原则[9]:
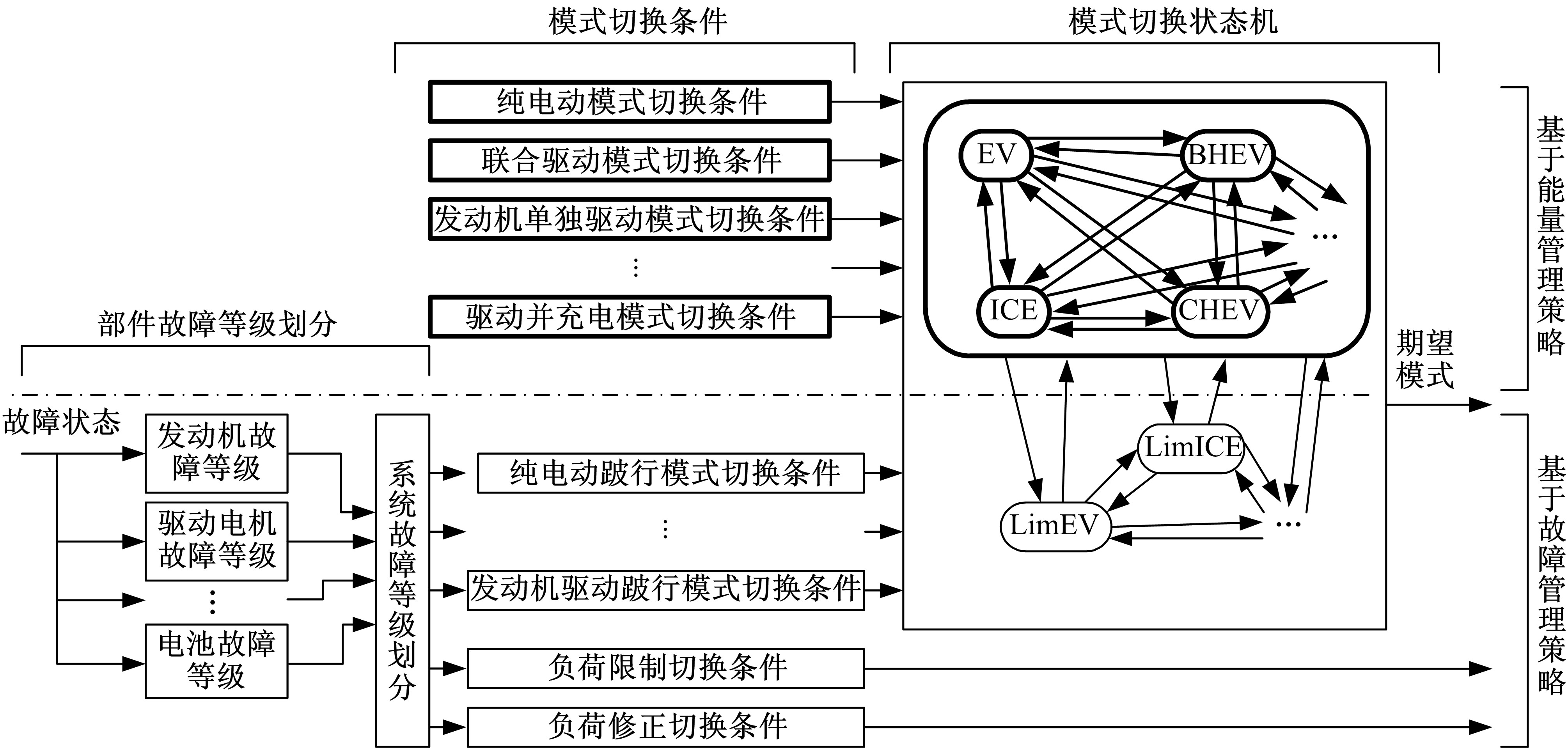 | 图6 故障诊断在模式选择模块中的集成原理图Fig.6 Integration principle in mode selection module |
(1)在系统没有出现故障时, 状态机必须能按照原控制策略的规则进行切换。
(2)当出现故障时, 必须切换到系统故障等级对应的模式中, 且不能与原有的切换条件产生冲突。
(3)必要时, 需要根据系统的故障等级添加新的驱动模式(如发动机跛行、纯电动跛行等)。
(4)出现故障后, 车辆的实际行驶模式要与当前汽车系统状态相适应, 确保行驶安全。
依据上述方案搭建的Simulink模型如图7所示。集成故障诊断后的状态机中, 输入到Stateflow的信号可以分为Switch_Bus信号和Sys_Err_Mod_Req信号两类。其中, Switch_Bus中的信号为基于能量管理的模式切换条件; Sys_Err_Mod_Req中的信号为基于系统故障诊断的模式切换条件。在原有能量管理策略的Stateflow基础上, 添加了Sys_Err_Mod_Req中相应的模式切换条件和驱动模式。
 | 图7 模式切换状态机模块Fig.7 Mode switching stateflow |
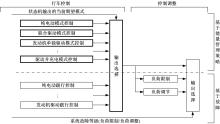
图8是诊断算法在行车控制模块中的集成原理图。行车控制模块里, 在原有的基于能量管理策略(粗线框所示)的各个模式控制的基础上进行诊断算法的集成。根据系统故障等级要求增加相应的车辆故障行驶模式; 最后, 在行车控制后进行了部件的容错控制, 具体包括对电机和发动机等负荷的调整和限制。
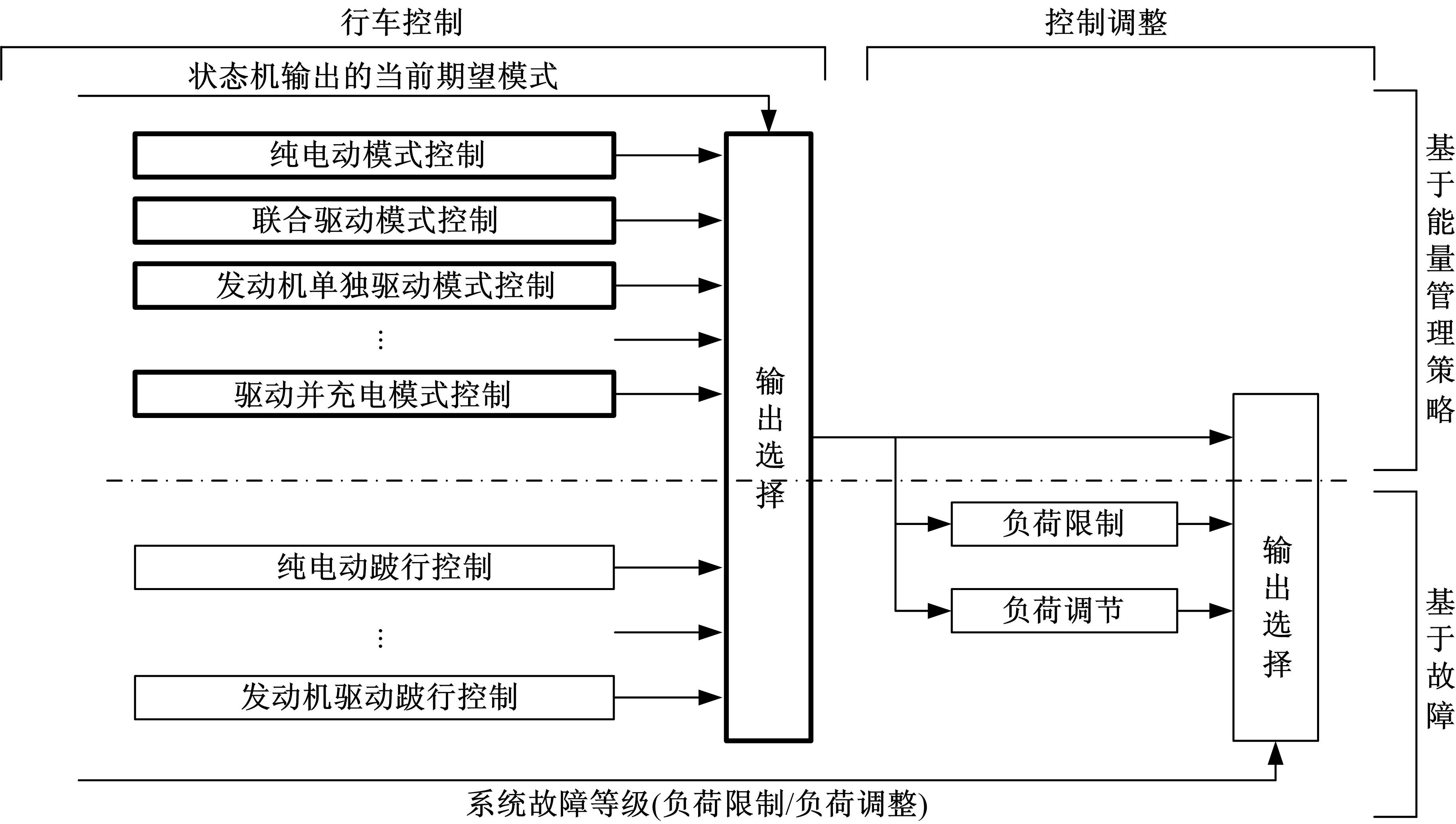 | 图8 故障诊断在行车控制模块中的集成原理图Fig.8 Integration principle in driving control module |
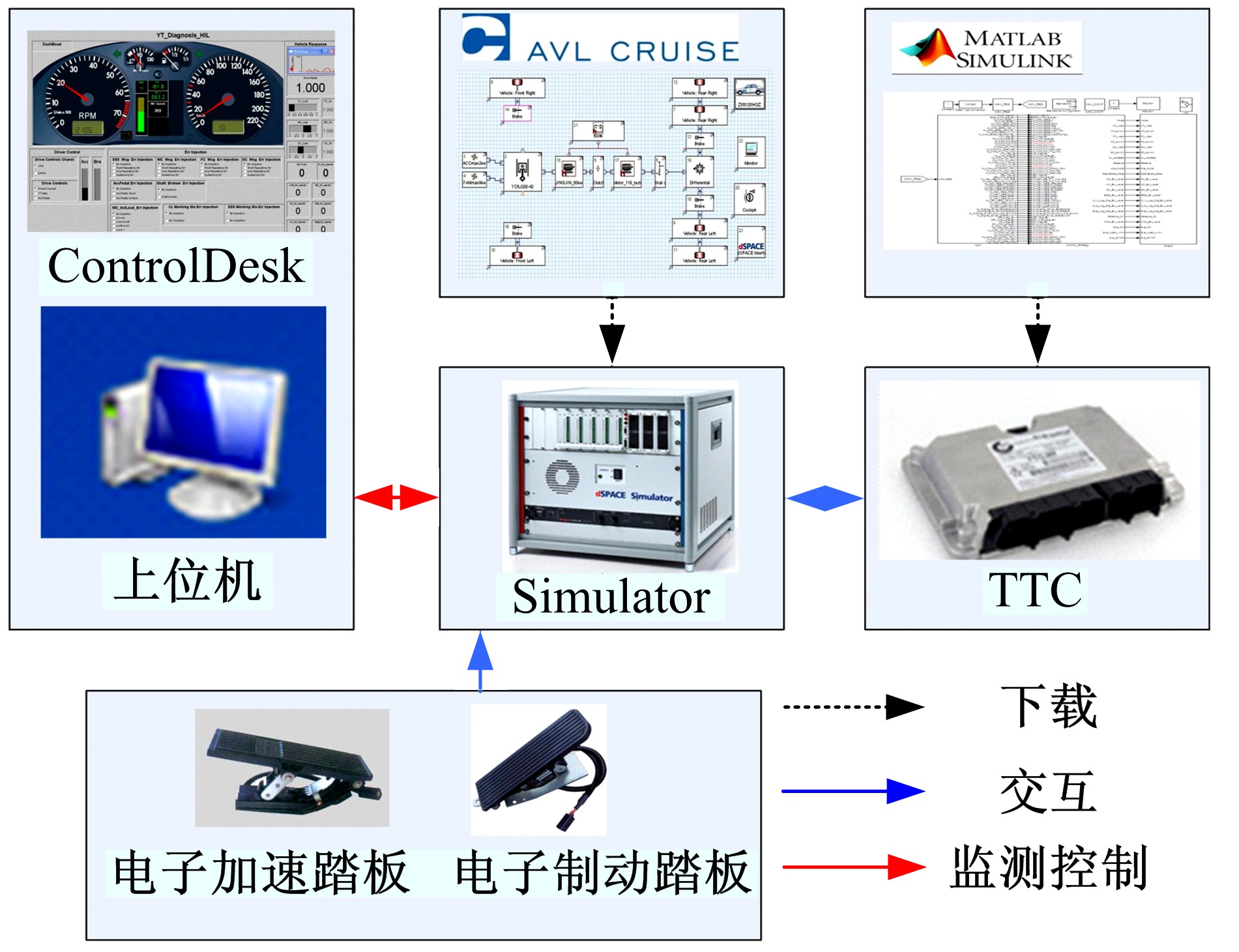
依据上述集成方案, 实现诊断系统在能量管理策略中的集成。然后针对上述系统搭建硬件在环测试平台:在仿真软件Cruise里搭建整车模型, 并将其下载到硬件在环系统Simulator中, 通过在Simulator中运行的实时车辆模型模拟HCU的工作环境; 在Simulink中搭建诊断系统算法模型并下载到控制器TTC中, 采用TTC模拟混合动力汽车的整车控制器。TTC与Simulator通过CAN总线、电线连接, 进行CAN信号与模拟信号的交互。上位机通过光纤与Simulator连接, 用于监测车辆运行状态, 并施加控制。在此, 以某一开关式混联混合动力汽车为例进行研究, 在Cruise软件平台下搭建其整车模型, 如图9所示。图10是硬件在环仿真平台的结构原理图。
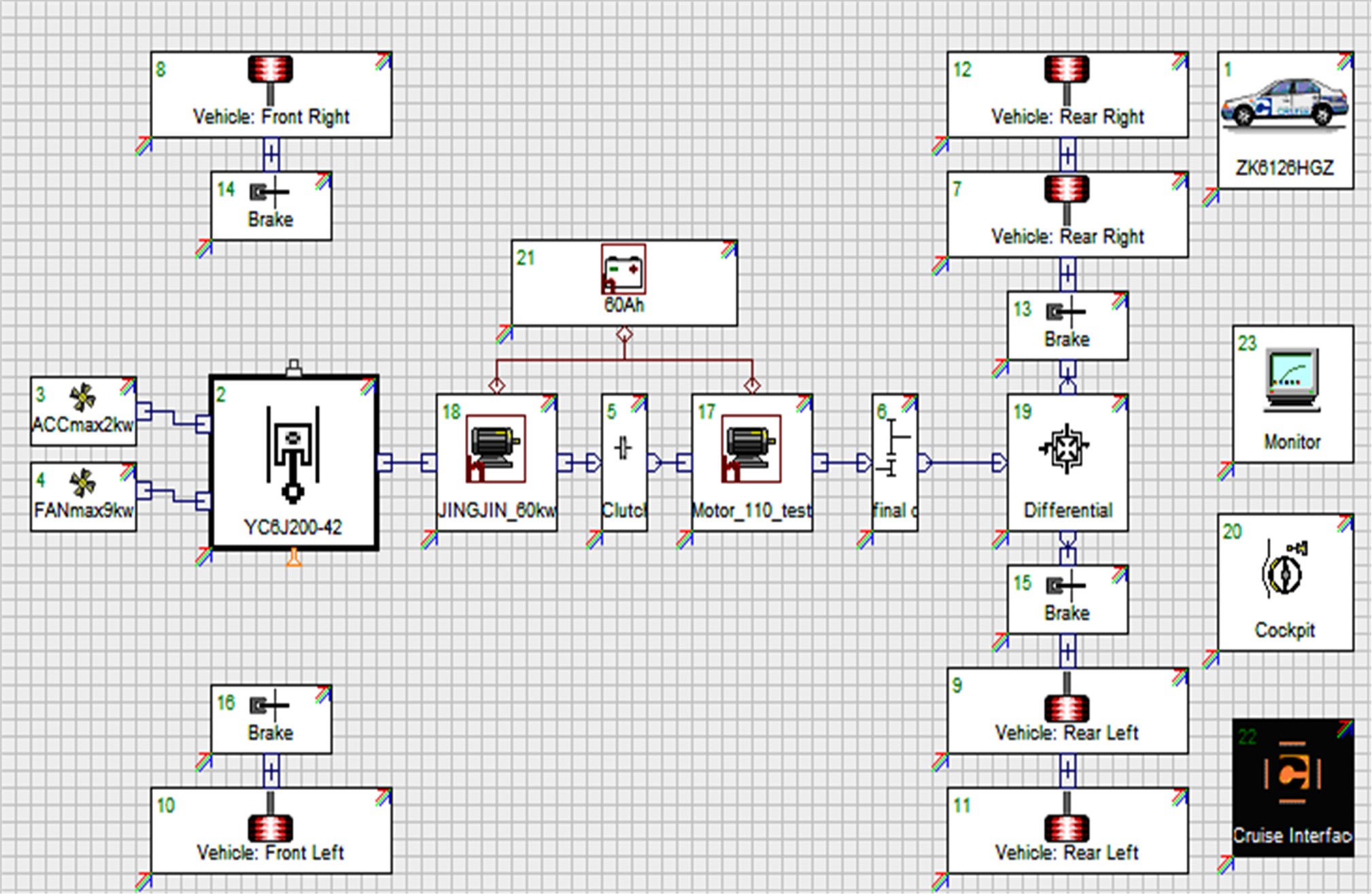 | 图9 Cruise整车模型Fig.9 Vehicle mode built in Cruise |
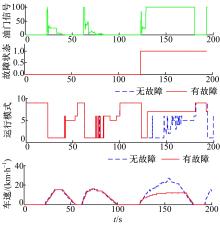
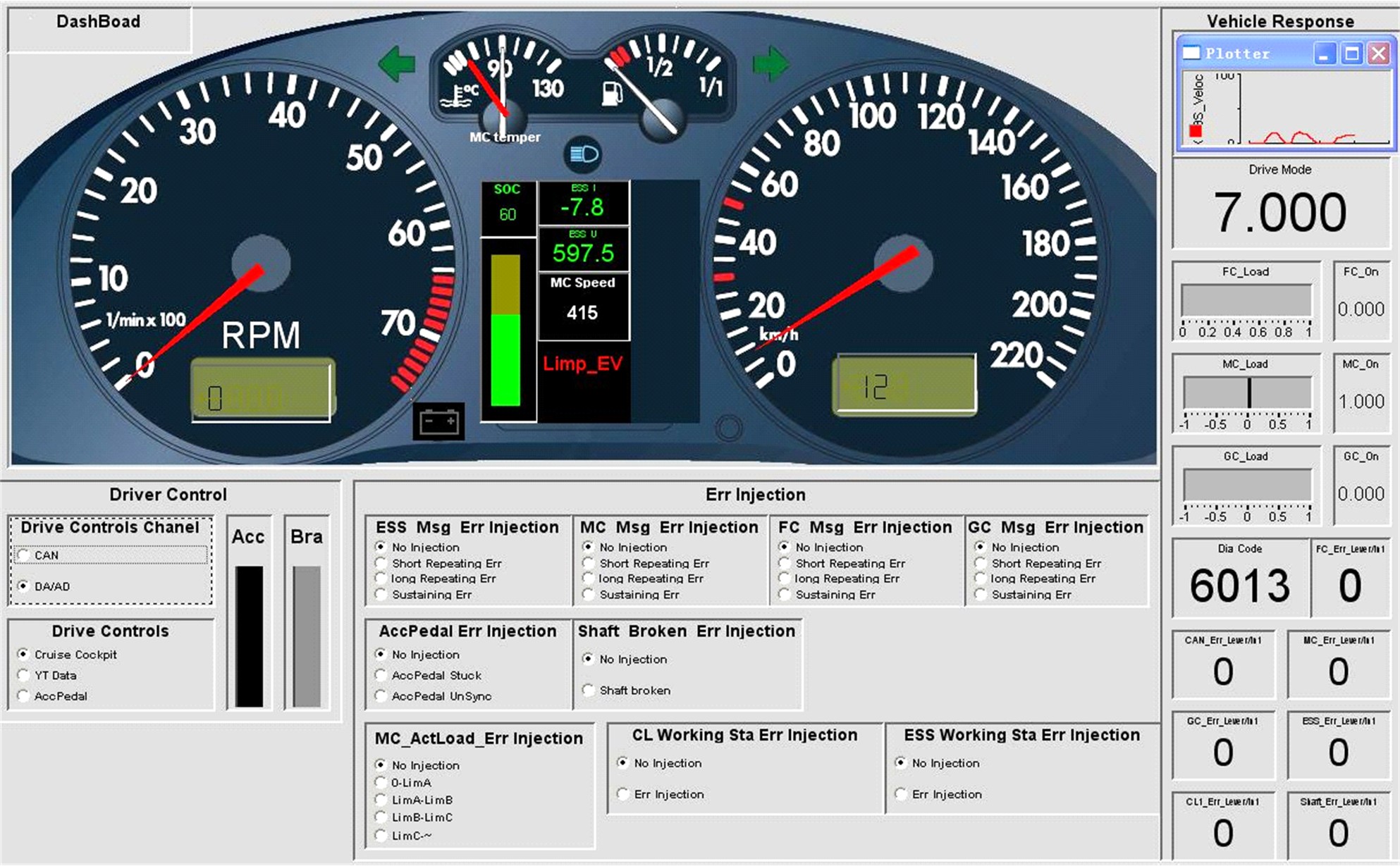
在仿真过程中采用故障注入单元(Failure insert unit, FIU)注入故障, 通过系统的响应情况判断策略的有效性和可靠性。在此, 采用上述平台进行加速踏板对电源短接故障的仿真模拟。运行仿真模型, 当仿真进行到130 s附近时, 通过设备接口将电子加速踏板对电源短接, 仿真后得到的虚拟仪表界面和仿真曲线分别如图11和图12所示。
如图11所示, 注入油门信号对电源造成短接故障后, 主监控界面中的Limp EV灯会在车辆驱动时被点亮, 表明此时车辆由于故障而行驶在纯电动跛行模式。故障代码显示为6013(参照SAE J2012故障代码定义), 表示此时加速踏板出现故障。驾驶员可以通过控制面板获取汽车的运行状态, 并及时采取相应措施防止发生交通事故。此时, 车辆以12 km/h速度行驶, 发动机停止工作(转速为0)。
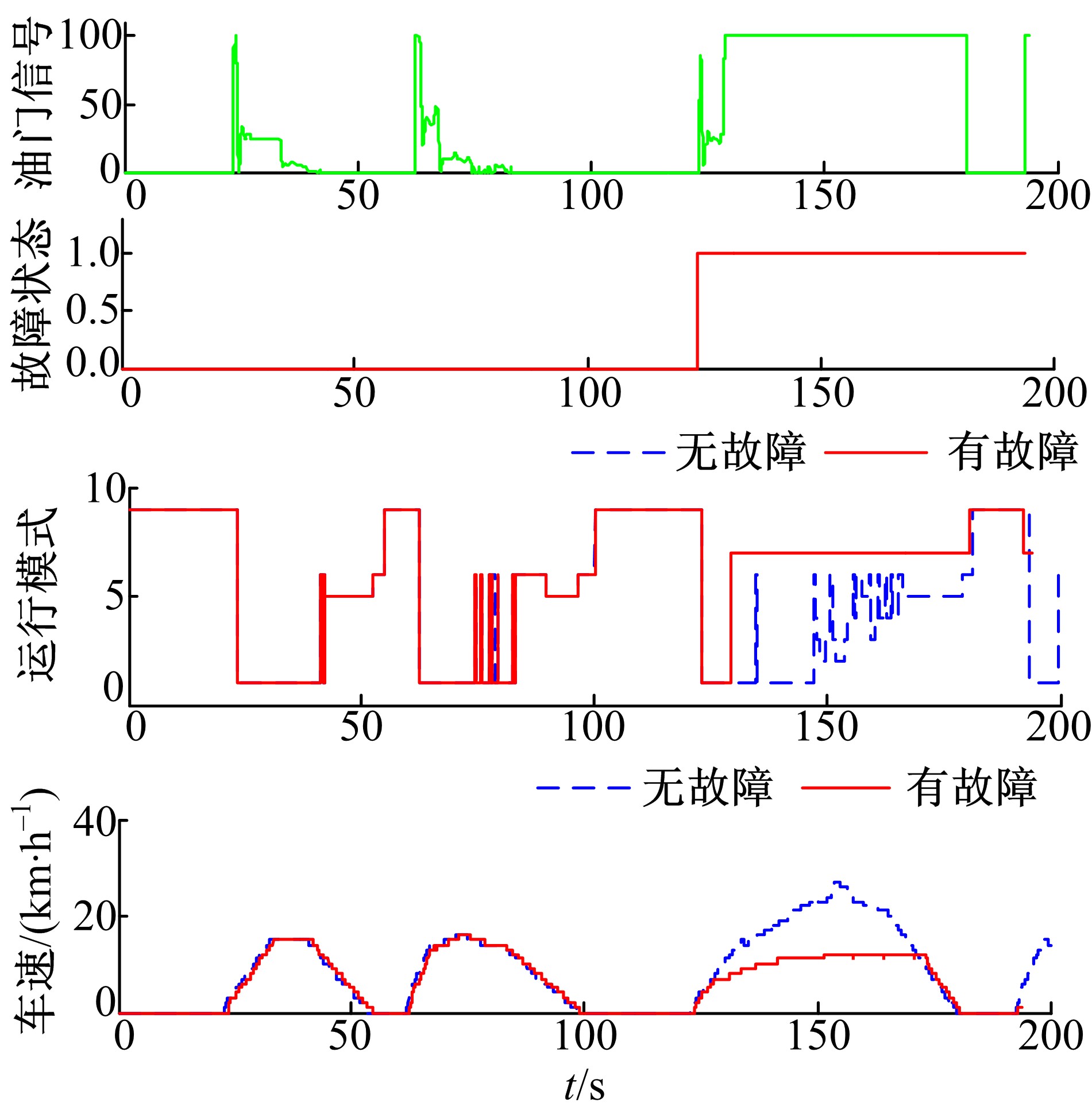
如图12所示, 发生故障后, 诊断系统能够快速、准确地检测到故障, 并输出故障状态(故障状态值为1)。与无故障行驶状态相比, 车辆在注入故障后只在Limp EV模式(mode=7)和停车模式(mode=9)之间切换, 并且车速被限制在15 km/h以下, 保障了行车安全性。
在介绍一般能量管理策略模型构架和故障诊断的基础上, 提出了一套基于混合动力汽车能量管理策略的诊断算法集成方案。在能量管理策略中集成了故障检测、故障确认、故障识别、部件故障等级划分和容错控制。硬件在环仿真试验证明, 提出的集成方案能够在有效诊断故障的同时, 良好地继承前期的能量管理策略, 对原有控制策略改动小, 实现了诊断算法与能量管理策略的无缝连接。该方法具有良好的通用性、可移植性和继承性, 可应用于其他型式混合动力汽车控制策略的开发过程。同时, 该集成方案能有效提高混合动力汽车的可靠性和主动安全性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|