

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于状态观测器的机敏约束阻尼板模态控制
[王攀1  , 鲁俊
, 鲁俊1 , 邓兆祥1, 2 , 廖海辰1 , 王正亚1 , 阳小光1 ]
, 鲁俊|
|


作者简介:王攀(1977-),男,副教授,博士.研究方向:车辆NVH控制,车辆系统动力学控制.E-mail:wangpan@cqu.edu.cn
以对边约束板结构为研究对象,研究了压电机敏约束阻尼技术的振动主动控制问题。基于压电本构关系、GHM阻尼模型和模态理论建立了模态主动控制模型。考虑到模态坐标在工程实际中无法由物理传感器直接测量,基于分离定理进行了模态状态观测器设计,并结合非耦合模态控制法与最优二次型控制进行了振动主动控制器设计。搭建了硬件在环实验平台,在不同外扰激励下开展了振动主动控制实验研究。结果表明,采用带有观测器的模态控制器,对板结构的振动主动控制能取得很好效果:当外界激励为复杂周期信号时,振动响应幅值衰减近60%;当外界激励为随机白噪声时,振动响应的均方根值减少9.48%。
The vibration active control of piezoelectric smart constrained layer damping technology was researched with a clamped-clamped plate structure. The modal active control model was established based on piezoelectric constitutive relation, GHM damping model and modal theory. The modal state observer was designed based on separation theorem since the modal coordinates can not be directly acquired by physical sensor in engineering practice. An active vibration controller was also designed using non-coupling modal control and quadratic optimal control. Experiments of hardware in the loop and active vibration control were carried out under different external disturbance excitations. Results show that, using modal controller with an observer, good effect of active control of the plate vibration can be obtained. When the external excitation is complicated periodic signal, the vibration response amplitude attenuates to nearly 60%. When the external excitation is random white noise, the root mean square value of the vibration response reduces by 9.48%.
传统的约束阻尼技术属于被动减振技术, 可有效降低中高频振动, 但对低频振动控制效果欠佳[1, 2]。主动控制技术具有较强的环境适应能力和抑制低频振动的能力[3], 但安全性和可靠性得不到保证。产生于20世纪90年代的机敏约束层阻尼(Smart constrained layer damping, SCLD)技术结合了约束阻尼技术与主动阻尼控制技术的双重优势, 已被众多学者证明是结构振动噪声控制领域一种非常有效的减振降噪手段[4, 5, 6]。机敏约束阻尼结构因为具有附加质量小, 响应速度快, 以及在很宽的频率范围内都保持较高的阻尼特性, 特别是对低频振动具有良好控制效果, 近年来一直是国内外振动控制的一个研究热点[6, 7, 8], 可广泛应用于航空航天、船舶、机械和汽车等领域。
机敏约束阻尼的核心在于压电约束层的主动控制。目前应用于机敏约束层阻尼结构的控制算法主要有PID控制[9]、鲁棒控制[10]、最优控制[11]、自适应控制[7]等。控制算法多局限于理论上的探索或者过于复杂不适合工程应用。模态控制因为具有计算简单、效率高、易于实时控制等优点, 是振动控制领域中常用的一种控制方法[12], 然而应用于机敏约束层阻尼技术的研究却很少[13, 14], 而且模态控制属于全状态反馈控制, 存在全状态反馈困难, 无法直接应用到工程实践中。
本文以局部覆盖SCLD结构的对边约束板为研究对象, 基于压电本构关系建立了模态主动控制模型, 为解决全状态反馈困难, 设计了带状态观测器的主动控制器, 并开展了硬件在环控制实验研究。在不同外扰激励下, 取得了良好振动控制效果。
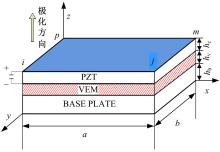
图1为SCLD的典型配置结构。SCLD结构自上而下分为三层, 分别是压电约束层、粘弹性层和基层。其中压电约束层为机敏压电陶瓷, 也是振动主动控制的动力源。当结构振动时, 阻尼层发生剪切变形, 同时传感元件感知结构振动, 然后通过反馈控制器基于逆压电效应, 主动调节机敏压电约束层拉伸或压缩, 使阻尼层的剪切变形进一步加强, 从而实现结构的主动振动控制。
有限元建模中, 其假设满足文献[10, 15, 16]提及的假设条件。利用有限元法将板离散为多个矩形单元。图2为SCLD结构二维4节点单元图, SCLD单元长度为a;宽度为b;每个单元含4个节点;每个节点有7个自由度,分别为压电约束层面内x向及y向位移、基层面对x向及y向位移、结构沿z向的横向位移以及单元中面绕x轴和绕y 轴的转角。
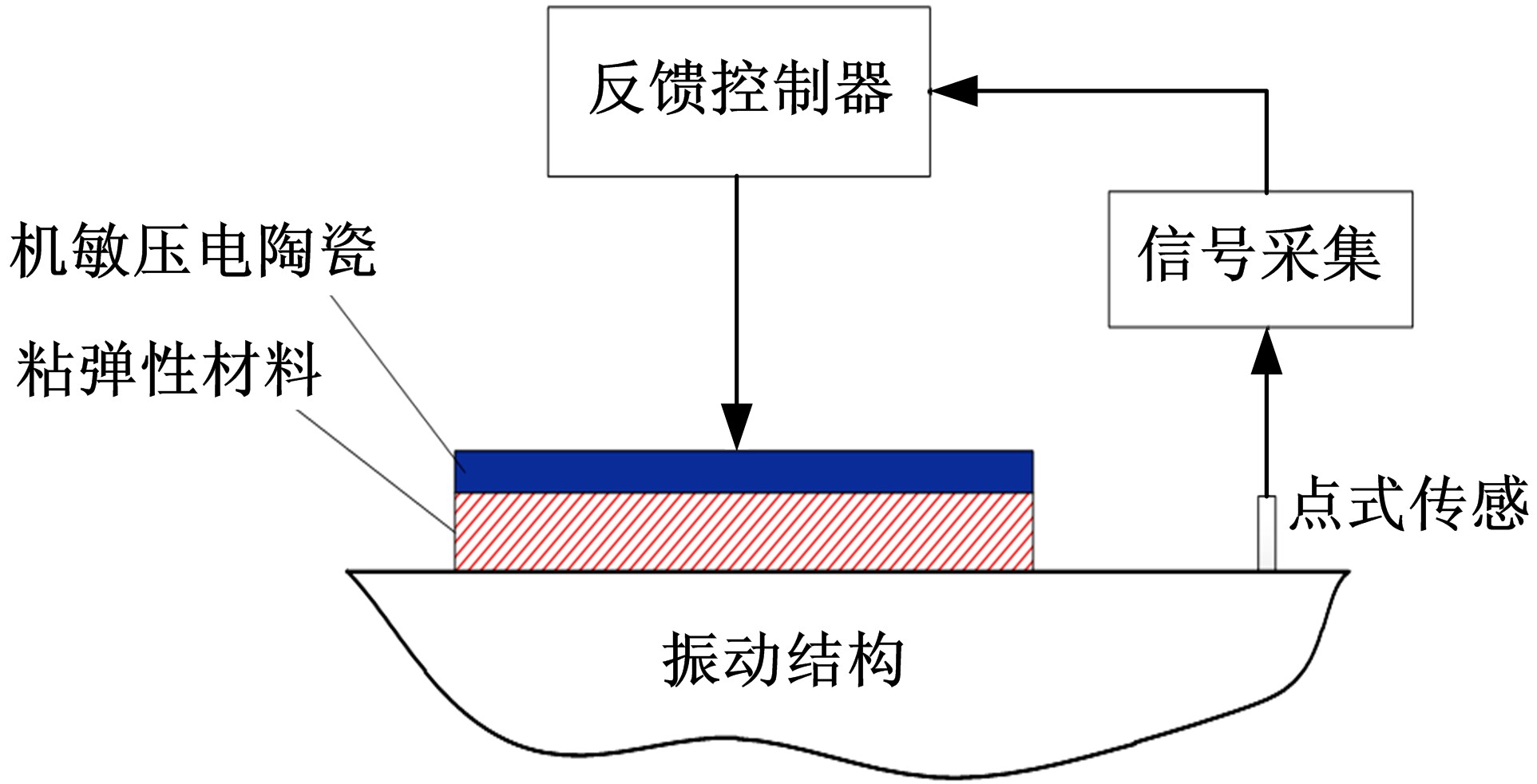 | 图1 典型的SCLD结构Fig.1 Typical structure of SCLD |
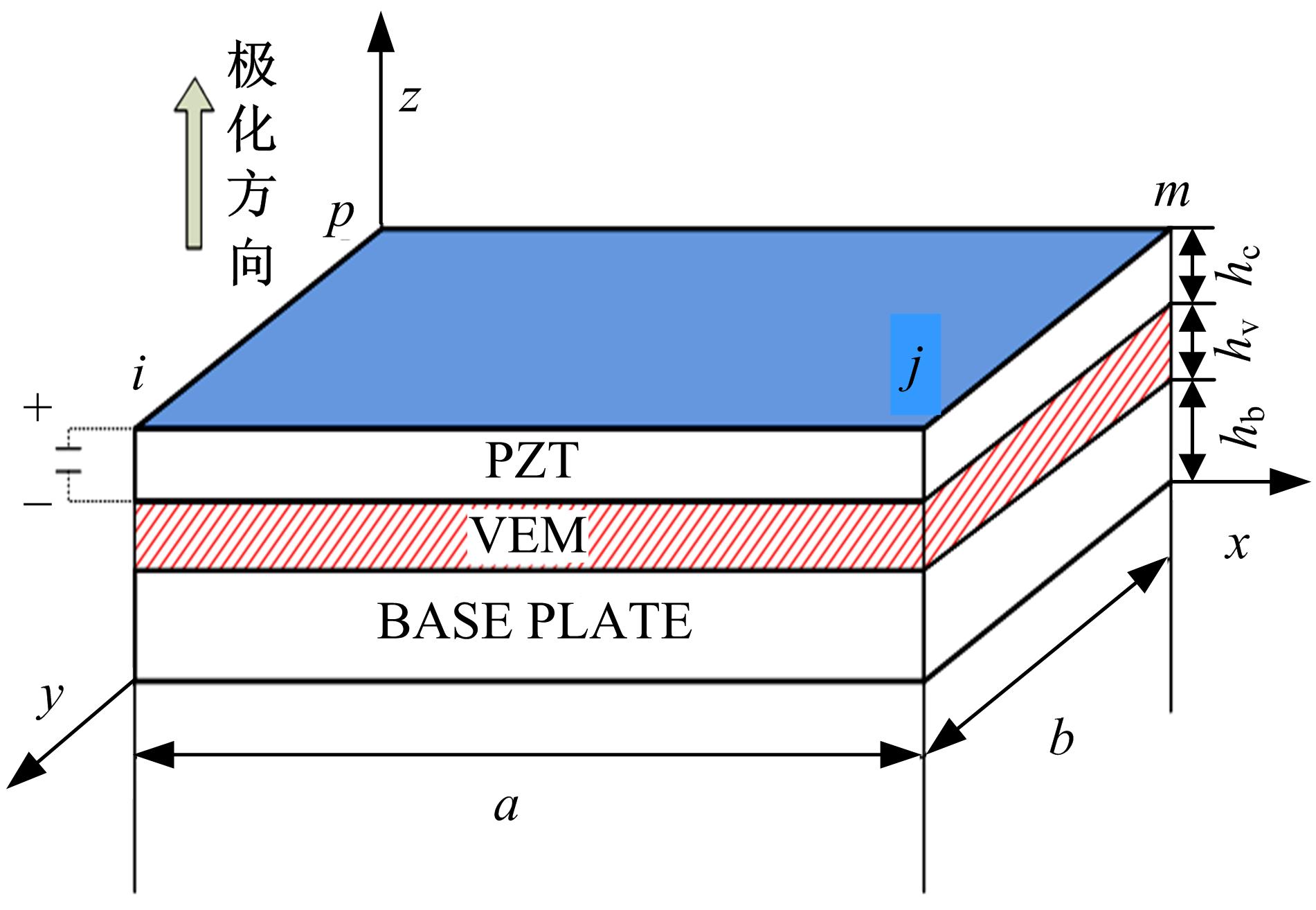 | 图2 SCLD 矩形单元Fig.2 SCLD rectangular element |
设板单元节点
则单元的节点位移向量为:
根据节点位移模式的帕斯卡准则, 假设形函数为:
式中:
当应力和电场同时存在时, 三维状态下压电材料的力学耦合本构方程为:
式中:
对于薄片状压电材料, 其厚度方向(
在二维状态下, 压电片在无外加电压下的应力应变关系满足平面应力问题的应力应变关系
将式(3)带入式(4), 可得到压电层仅在控制电压作用下产生的压电驱动应力为
式中:
根据经典板壳理论, 考虑各层之间的位移协调关系, 单元变形后约束层内任意点分别在
式中:
约束层中该点在
该点在面内的剪应变为:
结合式(7)(8), 则压电约束层内任意一点的应变为
式中:
根据弹性力学板壳理论, 外加电压时由面内位移引起的应变做功为:
代入式(5)(9)以及相应的形函数矩阵(1)后, 可得压电单元广义力为:
同理, 外加电压时由横向位移引起的应变做功为:
压电单元广义力矩为:
由于SCLD结构中含有粘弹性阻尼材料, 式(14)中阻尼属于非比例阻尼, 阻尼矩阵不满足对角化条件, 即复模态矢量不具备关于
受控下机敏约束阻尼结构的状态方程为
式中:
设模态振型矩阵为
把式(16)带入状态方程(15)可得:
式中:
通过线性变换后, 一个
文献[20, 21]指出, 复参数的状态空间模型可以用一个等价的实参数状态空间模型表示。设实参数空间的状态向量
其中复数空间到实数空间的变化矩阵
式中:
则实数系数的状态空间方程为:
通过变换后, 复数系数的状态方程矩阵全部转换为实数系数的状态方程矩阵, 式(19)仍由
根据模态展开定理, 模态坐标下的总响应可通过各阶模态叠加求得。然而, 在实际振动中特别是柔性结构, 往往是某一个或少量的低阶主模态对整个系统的性能起着主要作用, 振动主动控制也主要是消耗这些主模态的振动能量。将模态状态矢量
式中:下角s表示主模态; 下角r表示剩余模态。
通过状态方程下的模态解耦, 每一阶模态各自独立, 因此可以针对某一阶模态进行单独控制。假设式(20)中的第
第
式中:
压电材料的控制电压可表示为:
其中
闭环系统方程为
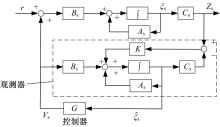
线性二次型最优控制实质是一种最优状态反馈, 实现模态控制的关键是获得被控模态的状态矢量, 然而在实际测量中传感器只能得到位移、速度或者加速度等信号。为实现状态反馈, 本文利用状态观测器估计系统的模态状态矢量, 以实现模态控制。基于观测器和状态反馈的分离特性, 状态反馈矩阵
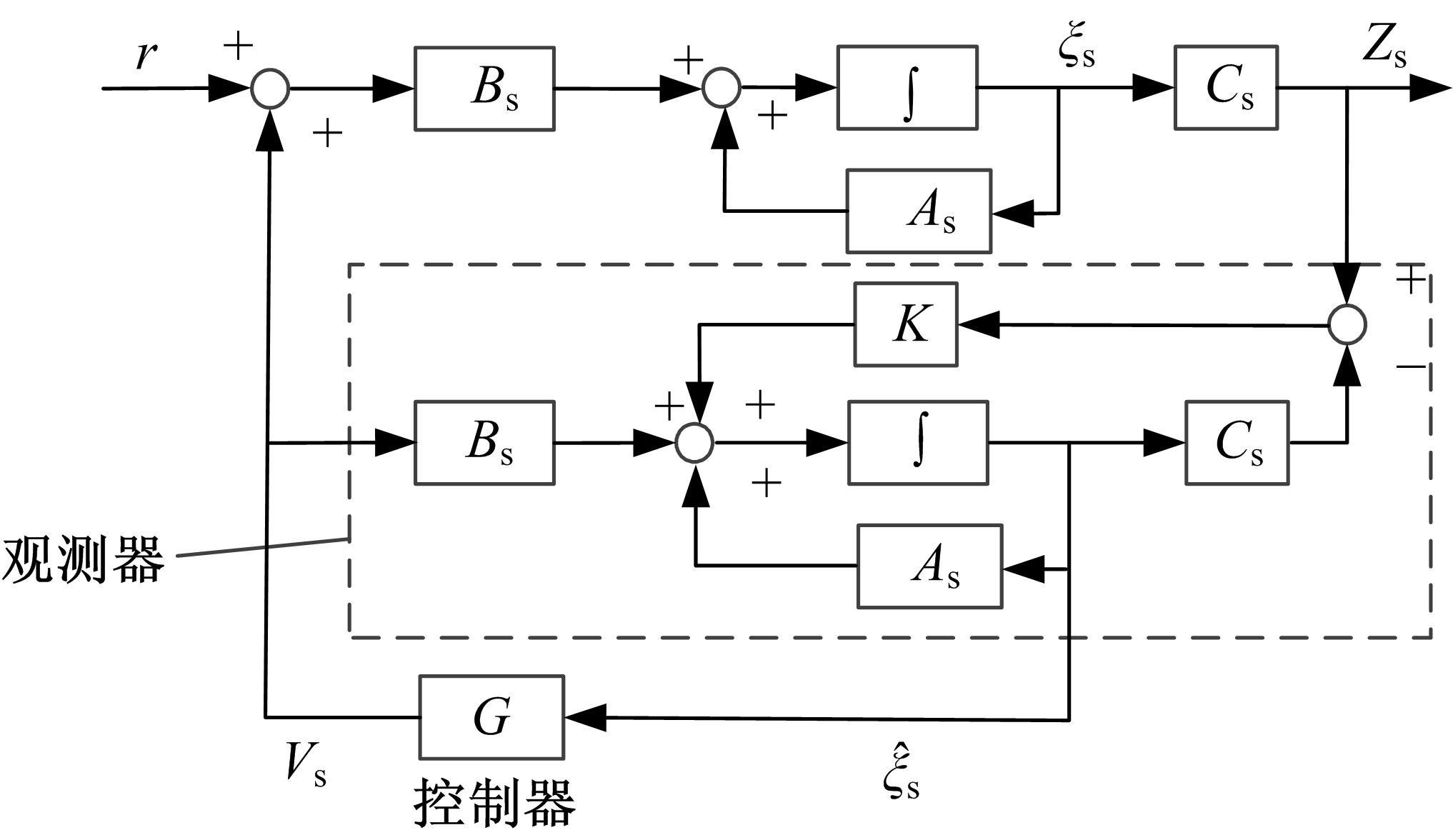 | 图3 带状态观测器的反馈系统Fig.3 Feedback system with state observer |
闭环状态观测器的状态方程为:
式中:
设观测误差
由式(28)可知, 通过观测器增益矩阵
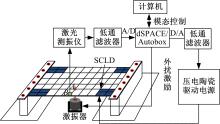
以局部覆盖SCLD结构的对边固支板为实验对象, 结构如图4所示。
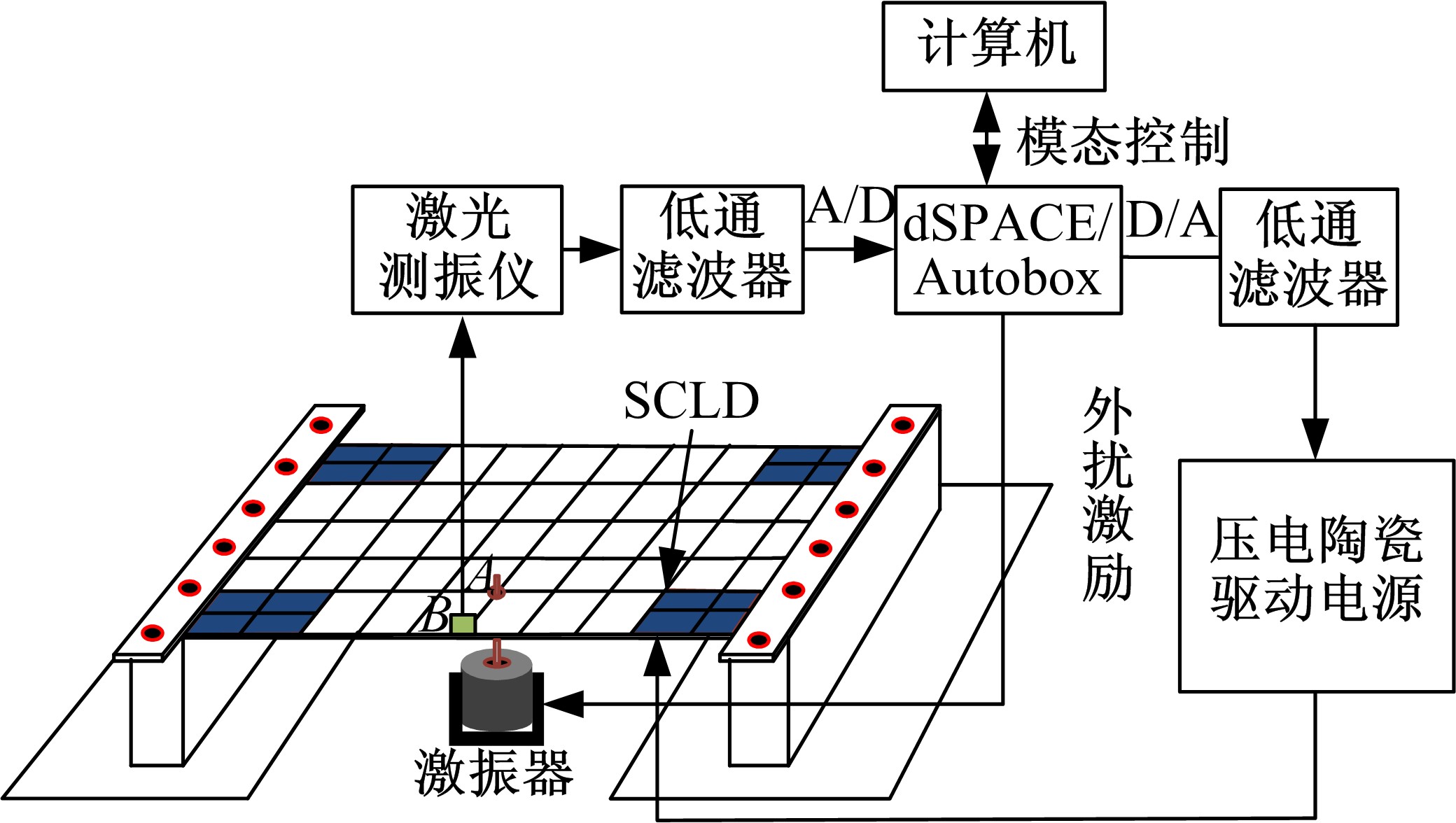 | 图4 主动控制实验系统Fig.4 Active vibration control experiment system |
各层几何和物理参数描述如下:基层(通过实验修正后的参数)为6061铝合金板, 长× 宽× 高为0.4 m× 0.27 m× 0.0025 m, 密度为2800 kg/m3, 弹性模量为55 GPa, 泊松比为0.25; 压电层为PLS-51型压电陶瓷, 厚度为0.001 m, 密度为7500 kg/m3, 柔顺系数为15.9× 10-12 m2/N, 泊松比为0.36, 压电应变系数为200× 10-12 C/N; 粘弹性层由ZN-1型粘弹性阻尼材料组成, 厚度为0.001 m, 密度为1250 kg/m3, 泊松比为0.3。
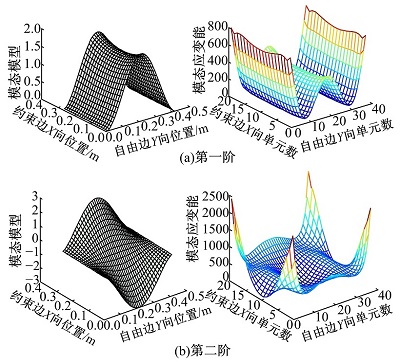
由模态实验发现, 光板的前4阶固有频率分别为74、107、211、256 Hz。在20~150 Hz的低频范围内, 响应峰值频率点主要集中在前两阶模态(一阶弯曲, 二阶扭转)。图5为研究对象的前两阶模态振型与应变能三维分布图。在不同的模态频率下, 模态变形剧烈的区域分布在不同的位置。由于压电片主要通过产生应力来抑制板的振动, 因此本文将压电片覆盖在前两阶模态应变能最大位置, 即两端约束根部位置。
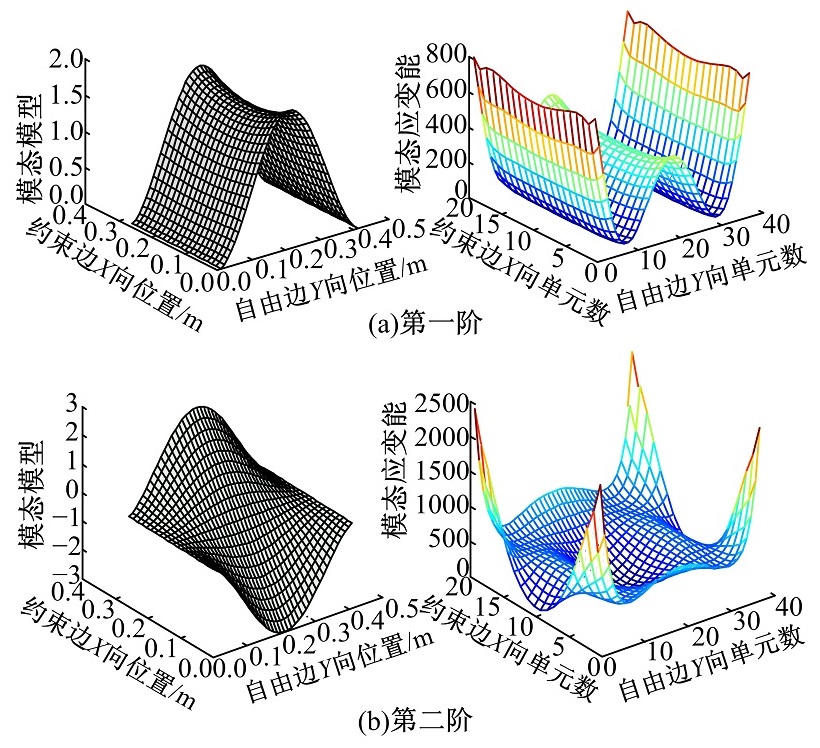 | 图5 前两阶模态振型与模态应变能分布图Fig.5 The first two orders modal shape and mode strain energy |
由于SCLD结构的主动控制目标是控制结构的低频振动, 且激振频率较低, 初始位移向量包含高阶固有振型的成分较少, 因此少数低阶弹性模态成为结构的主要模态。本文主动控制模型只包含前两阶主模态, 控制器维数为4× 4。硬件在环实验具体布置如图4所示。实验中, 为充分激励出前两阶模态, 使模态控制模型具有较大的可观、可控性, 将小型激振器和非接触式激光速度传感器位置放在第三阶与第四阶模态节线上, 并对速度传感信号进行二阶Butterworth带通滤波, 以减少传感信号中剩余模态分量和干扰信号的影响。根据控制器和观测器的分离特性, 控制器与观测器设计相互独立, 取最优加权矩阵
| 表1 观测器与系统极点 Table 1 Poles of observer and controller |
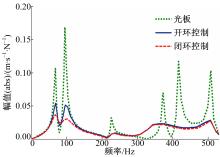
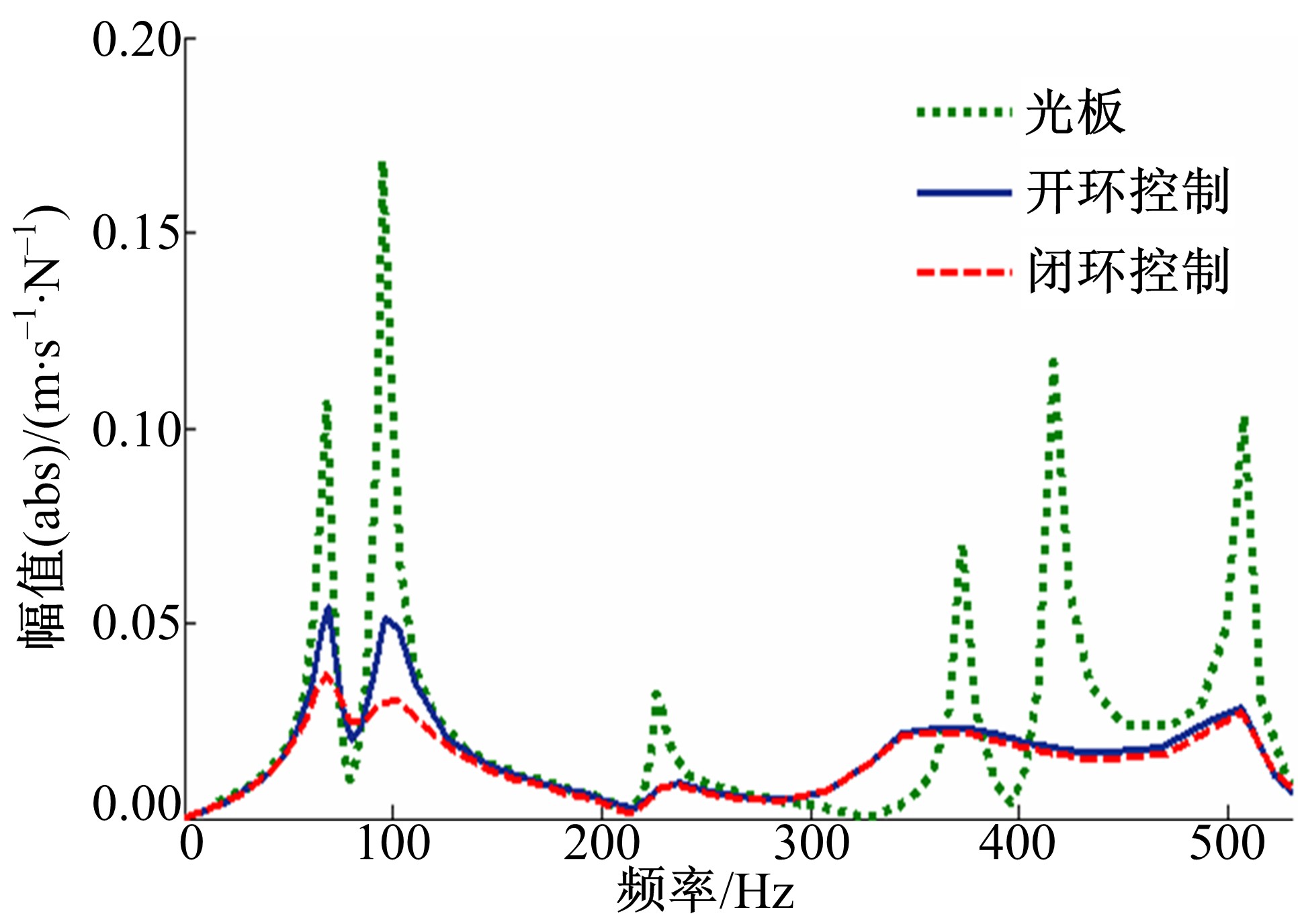 | 图6 控制前后频响函数曲线对比Fig.6 FRF before and after control |
以小型激振器为外扰激励, 分别在机敏约束阻尼板前两阶固有频率正弦叠加的复杂周期信号与20~150 Hz随机白噪声激励下, 得到实验控制前后的时域响应曲线如图7和图8所示。
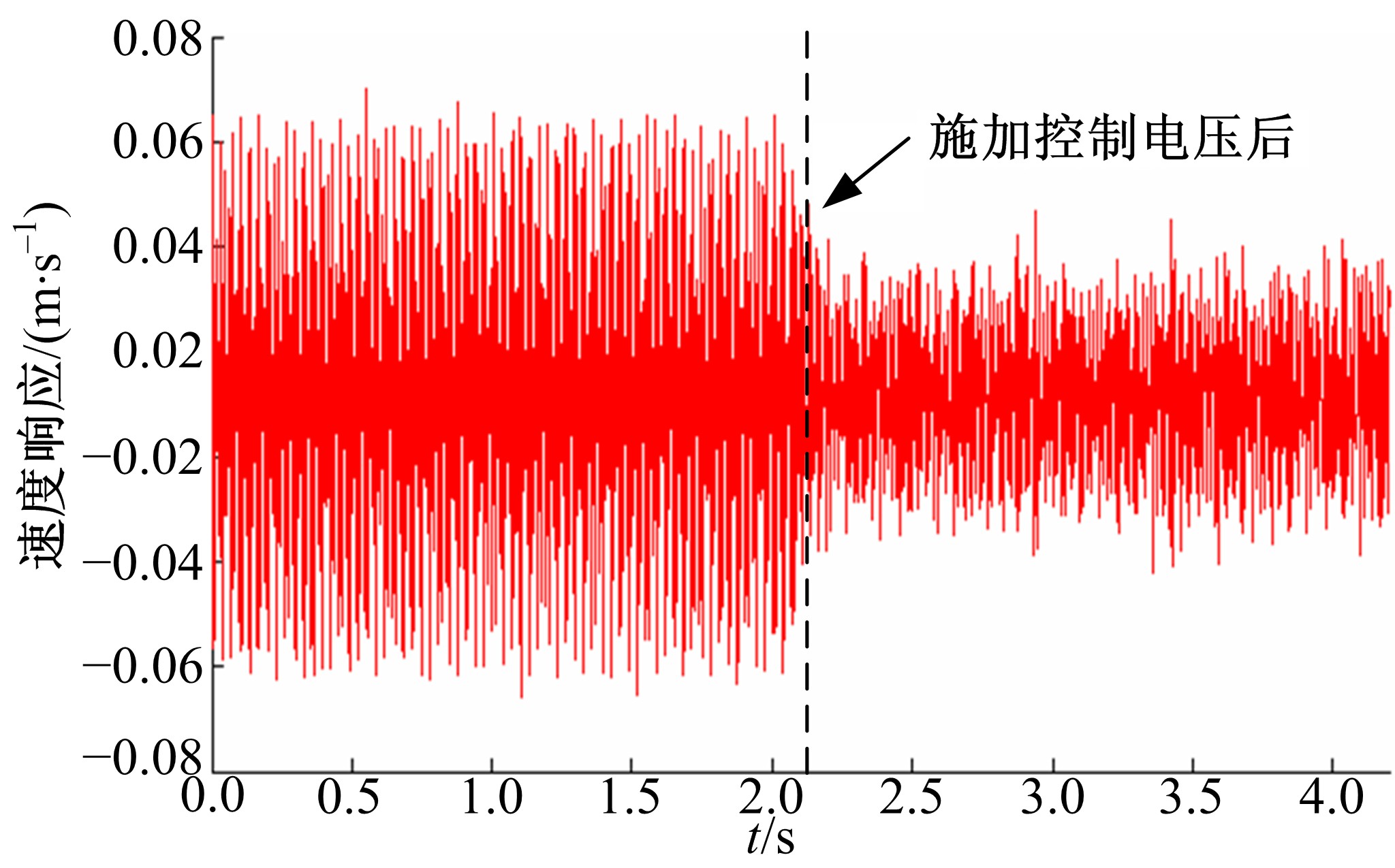 | 图7 复杂周期信号激励下, 控制前、后速度响应曲线Fig.7 Velocity response before and after control under complex periodic signal excitation |
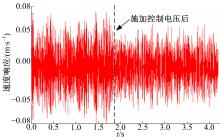
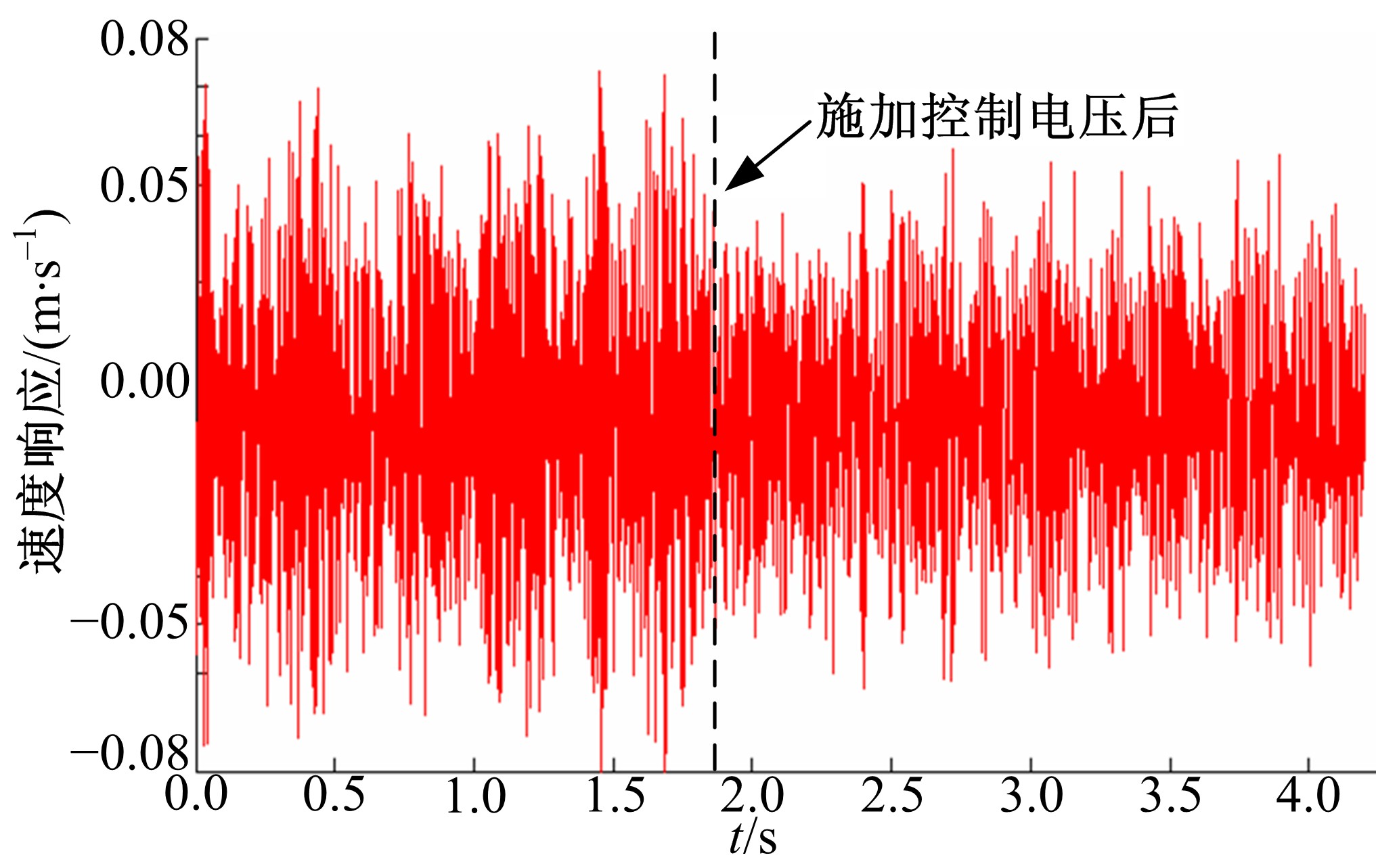 | 图8 高斯白噪声信号激励下, 控制前、后速度响应曲线Fig.8 Velocity response before and after control under gauss white noise excitation |
由图7和图8的实验结果可知, 通过施加主动控制电压后, 复杂周期信号激励下振动响应幅值衰减了近60%, 控制效果十分明显; 即使在随机白噪声信号激励下, 闭环控制后的随机响应均方根值也降低了9.48%, 证明了本文控制方法的有效性。而且在两种外扰激励下, 压电片驱动电压都低于压电陶瓷驱动电源的最大电压150 V, 控制电压较小。
(1)通过本文的控制方法, 在复杂周期信号激励下振动响应幅值能降低近60%; 随机激励下振动响应均方根值能降低9.48%, 控制效果明显, 且需要控制的能量较小, 可满足工程实际应用要求。
(2)将状态观测器与模态模型相结合, 可以较好地解决模态控制的全状态反馈困难问题, 具有一定的工程应用前景。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|