











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于Trucksim的双挂汽车列车瞬态侧翻状态
[张义花, 许洪国, 刘宏飞 ]
]
]
|
|


作者简介:张义花(1987-),女,博士研究生.研究方向:多挂汽车列车横向稳定性.E-mail:zhangyihua1989@126.com
使用多体动力学软件Trucksim构建双挂汽车列车模型,并根据仿真结果进行瞬态侧翻状态研究。通过仿真不同车速下的瞬态阶跃响应,获得汽车列车的各个轮胎垂直载荷、侧向加速度、横摆角速度、车辆侧倾角以及铰接角等状态变量的变化规律。根据轮胎垂直载荷瞬态变动判断车辆各轴发生临界侧翻的先后顺序,并与侧向加速度阈值评价结果对比,发现第一节半挂车车轴最先发生临界侧翻危险。通过变化车速与转向盘转角,得到临界侧翻的稳定行驶速度域。
A vehicle model was constructed using the multi-body dynamic software Trucksim to investigate the transient rollover state according to the simulation results. Through the transient step response simulation under different speeds, the change laws of the state variables were acquired, including the vertical load on the tire, lateral acceleration, yaw rate, roll angle and articulation angle. According to the transient changes of the vertical load on the tire, the sequence of critical rollover of the axles was determined, which was compared with the lateral acceleration threshold evaluation results. It is shown that the first semitrailer axle is the earliest prone to critical rollover risk. By changing the vehicle speed and the steering wheel angle, a vehicle speed stability region of the critical rollover is acquired.
双挂汽车列车由牵引车、半挂车、拖台和与其相连的半挂车组成, 国外称为A-Double[1]。由于双挂汽车列车由4个车辆单元组成, 且其车身长、载重量大以及满载时质心位置发生变化等, 使得车辆易发生横向摆振、折叠等危险失稳状况[2]。双挂汽车列车一旦发生失稳, 对道路其他行驶车辆构成威胁, 容易发生连环交通事故。另外, 由于双挂汽车列车在运输效率和成本方面优势明显, 该车型在欧洲、美国等地得到大量使用[3]。De Melo[4]通过建立双挂汽车列车的线性模型对长重型汽车列车进行了横向稳定性分析。Aoki等[5]提出多轴对铰接式车辆横向动力学的影响, 并利用稳定性因数对稳态转向和移线情况下转向灵敏性进行分析。美国密西根大学交通研究所从结构和使用方面对铰接式重型车辆进行了动力学性能评估[6]。目前, 关于多挂汽车列车的横向稳定性研究多采用控制方法, 即基于挂车主动转向[7, 8]和基于主动制动[9, 10]的控制策略。这些控制策略只是对线性模型进行分析, 缺乏通用性。综上所述, 对双挂汽车列车的研究大都集中在建立线性模型, 进行横向稳定性分析和控制, 没有考虑横向失稳形式受到多个因素的影响。因此, 本文将利用双挂汽车列车多体动力学软件Trucksim, 对整车瞬态侧翻稳定性进行研究。
影响汽车列车侧翻的主要因素为左右侧轮胎的垂直载荷、侧向加速度、横摆角速度、侧倾角以及铰接角。这些动力学模型参数随车辆行驶状态实时变化, 可以准确表征车辆侧翻危险倾向。本文结合非线性轮胎模型和非独立悬架模型所组成的整车模型, 分析不同车速条件下的整车阶跃响应, 将轮胎垂直载荷与侧向加速度阈值进行比较, 判断各轴车轮临界侧翻的先后顺序。改变车速和转向盘转角, 得到临界侧翻稳定行驶速度区域, 为双挂汽车列车的设计及安全行驶奠定基础。
双挂汽车列车由4个车辆单元组成, 结构相对复杂。因此, 在Trucksim中分别用“ unit 1, 2, 3, 4” 表示牵引车、第一节半挂车、拖台和第二节半挂车。图1为车辆的非线性轮胎模型。另外, 除牵引车的前转向轴为单排轮胎外, 其余均为双排轮胎, 左侧车轮为“ L” , 右侧车轮为“ R” , 内侧轮胎为“ i” , 外侧轮胎为“ o” , 内外侧轮胎位置如图2所示。具有钢板弹簧非独立悬架的双挂汽车列车模型如图3所示。车辆模型的坐标采用右手坐标系,即沿车辆行驶方向为X坐标轴正方向;驾驶员左侧为Y坐标轴正方向;垂直地面向上为Z坐标轴正方向, 如图2所示。
 | 图1 轮胎侧向力与侧偏角的关系Fig.1 Tire side force versus slip angle |
 | 图2 车辆坐标系Fig.2 Vehicle coordinate system |
 | 图3 双挂汽车列车模型Fig.3 Tractor and double trailer combination model |
在仿真场景中, 取地面附着系数为0.85的沥青路面模型。牵引车前后轴分别定义为1轴、2轴, 第一节半挂车、拖台及第二节半挂车轴分别定义为3、4、5轴。另外, 双挂汽车列车模型处于空载状态。双挂汽车列车模型参数见表2。
| 表1 双挂汽车列车模型参数 Table 1 Tractor and double trailer combination model parameters |
在相关研究中, 以侧向加速度阈值[11]作为评价车辆侧翻危险状态的主要指标。侧向加速度虽能表征发生侧翻的可能性, 却不能确定是否侧翻, 因此本文将轮胎的垂直载荷作为判断侧翻发生的主要指标, 并根据侧向加速度、横摆角速度、侧倾角、铰接角等状态变量辅助判断。
车辆系统高速紧急转向时, 车辆的阶跃响应可反映车辆系统的稳定性和灵敏度。因此, 结合双挂汽车列车模型对瞬态侧翻危险状态进行研究。设定车速为90 km/h, 转向盘转角为120° 的阶跃响应, 如图4所示。
 | 图4 转向盘阶跃输入Fig.4 Step response of steering wheel angle |
 | 图5 各车辆单元质心侧向加速度变化Fig.5 Effect of lateral acceleration of each unit’ s CG on step response |
 | 图6 各车辆单元横摆角速度变化Fig.6 Effect of yaw rate of each unit’ s CG on step response |
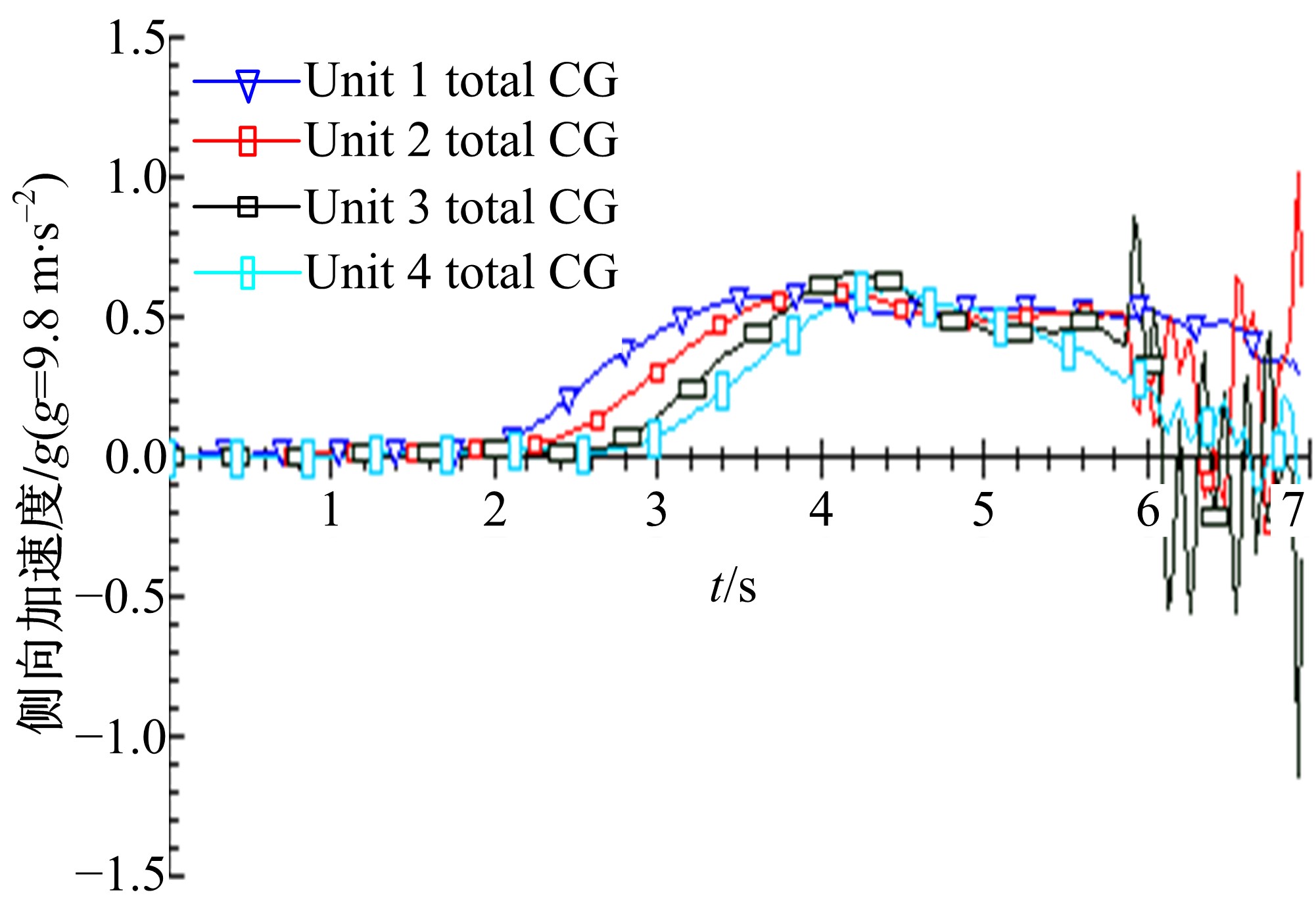
由图5可知, 4个车辆单元的侧向加速度在阶跃发生后都超过0.5g(g=9.8 m/s2), 且第3个车辆单元即拖台的加速度变化最大。第一节半挂车和拖台在侧翻前震荡剧烈且最明显, 该变化趋势在横摆角速度变化中同样可以验证, 如图6所示, 第一节半挂车横摆角速度急剧上升的同时托台震荡变化。说明这两个车辆单元是车辆发生侧翻的主要影响因素, 在6 s后整车侧翻失稳。
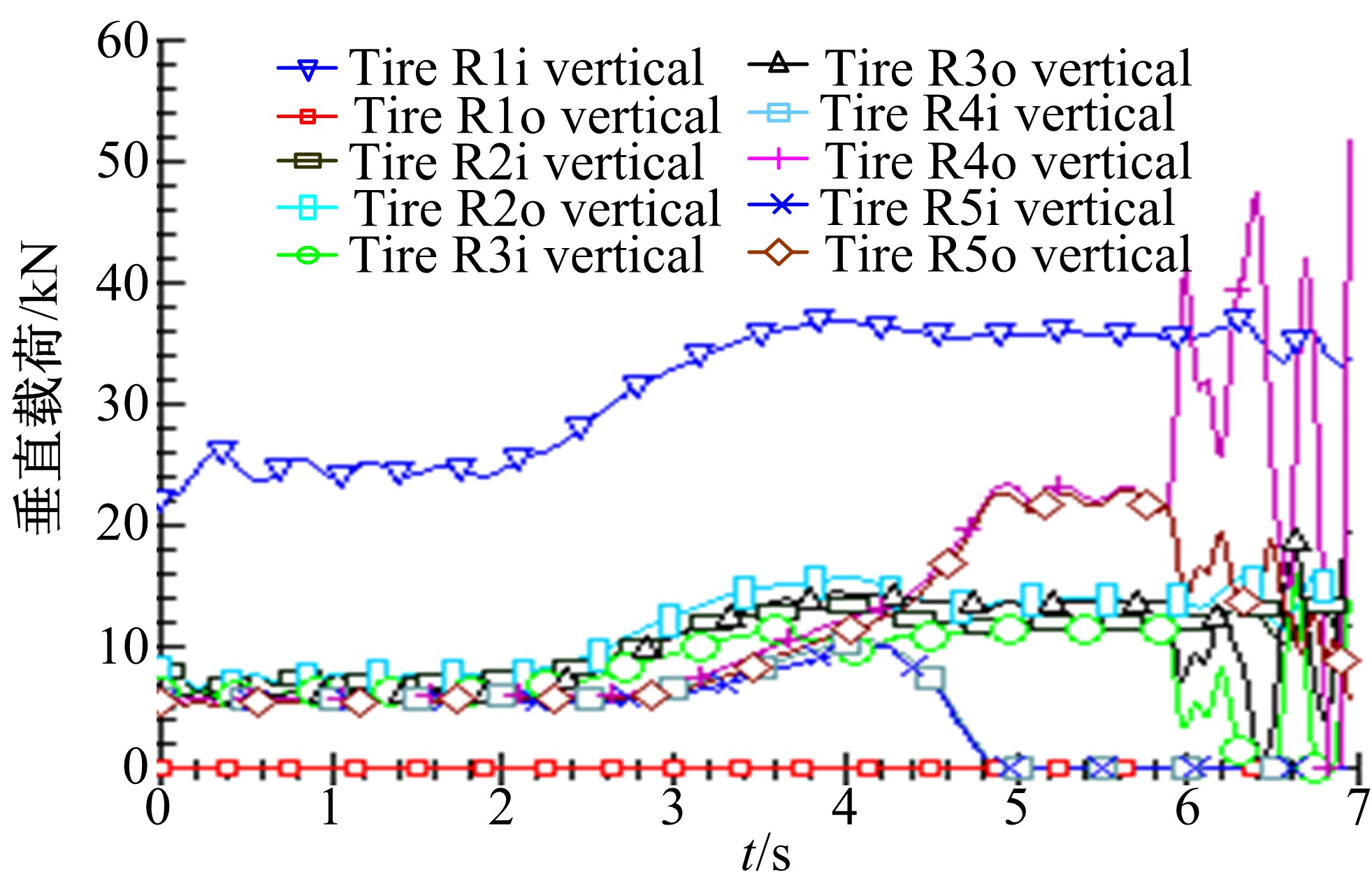
左、右轮胎垂直载荷变化如图7和8所示。在3.3 s时左侧第3轮外侧轮胎垂直载荷为0, 说明此时轮胎有离开地面的趋势。其次是第3轮内侧车轮, 第2轮外侧车轮, 第4、5轮外侧车轮。但第2轮外侧车轮垂直载荷短暂为0后又上升, 其余轮胎载荷仍为0, 说明侧翻的先后顺序为3轴→ 4轴→ 5轴, 且侧翻发生在4 s左右, 比采用侧向加速度作为评价指标判断结果早2 s多。
 | 图7 左侧轮胎垂直载荷变化Fig.7 Effect of left tire vertical load on step response |
 | 图8 右侧轮胎垂直载荷变化Fig.8 Effect of right tire vertical load on step response |
由图9和10可知, 双挂汽车列车仿真4 s后, 拖台和第二节半挂车侧倾角急剧变大; 6 s以后, 铰接角2即第一节半挂车与拖台之间夹角急剧变大, 说明拖台和第二节半挂车组成的整个车辆发生侧翻。
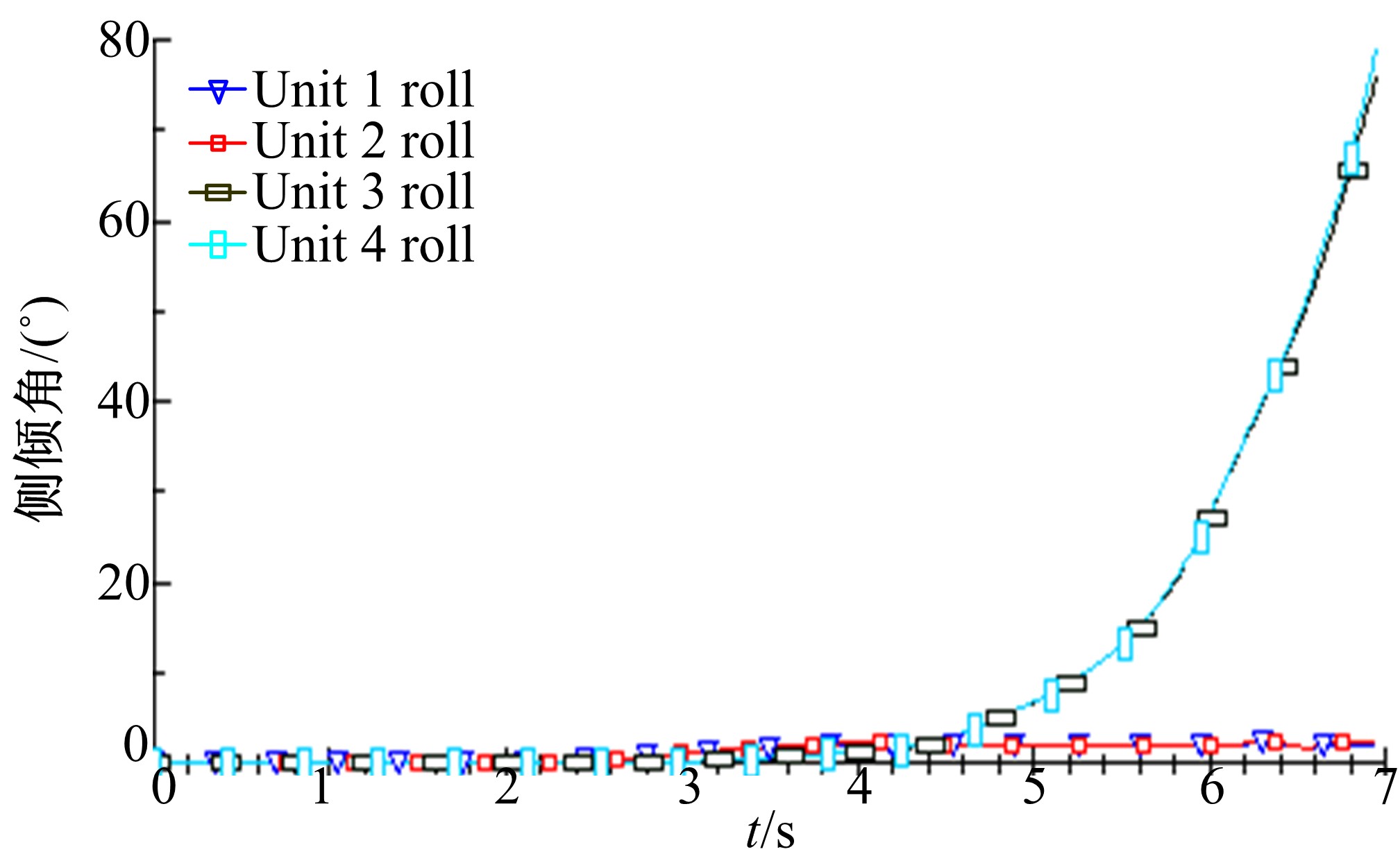 | 图9 各个车辆单元侧倾角变化Fig.9 Effect of roll angle of each unit on step response |
为验证轮胎的垂直载荷变化与瞬态侧翻危险状态直接相关, 在同一转向盘转角下分别选择不同车速进行阶跃响应仿真。根据在最短时间内轮胎垂直载荷达到最小时, 对应其余轮胎垂直载荷的大小, 得出不同车速下各个车轴发生临界侧翻的响应顺序, 以整车左侧车轮为例。
由表2可知, 同一转向盘转角下, 随着车速的提高, 车辆发生瞬态侧翻的可能性增加; 无论何种车速下, 第一节半挂车外侧车轮都是首先出现瞬态侧翻失稳, 这与半挂汽车列车[12]引发瞬态侧翻失稳的车轴不同。结合图7可知, 牵引车外侧左后轮垂直载荷只是短暂为0, 而拖台和第二节半挂车左侧轮胎垂直载荷却很快下降为0且不再变化, 说明双挂汽车列车高速侧翻失稳取决于第一节半挂车车轴, 因为它与拖台的铰接方式(见图3)对拖台和第二节半挂车影响很大; 其次为拖台车轴和第二节半挂车轴。为比较轮胎垂直载荷和侧向加速度评价汽车列车侧翻稳定性的效果, 本文选择各个车辆单元侧向加速度所能达到的最大值作为判断瞬态侧翻的依据。
由表3可知, 车速为90 km/h时, 第一节半挂车与拖台的侧向加速度急剧变化, 如图5所示, 车辆已经发生侧翻失稳。由静态侧翻阈值[11]可知, 车速为70 km/h时, 车辆侧向加速度超过静态侧翻阈值, 接近侧翻失稳; 车速为50 km/h时, 各个车辆单元侧向加速度大小相当, 无法判断双挂汽车列车各个车轴的侧翻顺序。
| 表2 阶跃响应下各个车辆单元轮胎垂直载荷变化 Table 2 Effect of tire vertical load of each unit on step response N |
| 表3 阶跃响应下各个车辆单元侧向加速度变化 Table 3 Effect of lateral acceleration of each unit on step response g=9.8 m2/s |
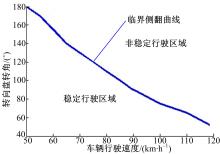
在双挂汽车列车行驶过程中, 受路面条件和周围车辆的影响, 驾驶人需要不断地变换行驶速度并调整转向盘转动角度, 研究车速、转向盘转角与临界侧翻之间的关系, 对合理做出避免侧翻危险发生的正确决策很有必要。规定轮胎垂直载荷出现0时即为接近临界侧翻。
由图11可知, 随车速的提高, 发生临界侧翻的方向盘转角逐渐减小。临界侧翻曲线随车速提高几乎成线性下降趋势, 说明车速的提高对方向盘转角的变化很敏感。因此, 高速行驶中应提醒驾驶员谨慎驾驶, 转向时根据车速调整方向盘转角, 同时尽量避免转向盘转角调整幅度过大, 以防止发生侧翻危险。
(1)在双挂汽车列车瞬态侧翻危险工况评价中, 与采用侧向加速度阈值相比, 采用轮胎垂直载荷可提前2 s检测到车辆有侧翻趋势且更准确。
(2)双挂汽车列车左转临界侧翻失稳时, 第一节半挂车车轴左外侧车轮首先出现垂直载荷为0并持续, 其次为拖台和第二节半挂车车轴左外侧轮胎, 即整车的侧翻顺序为3轴→ 4轴→ 5轴。
(3)随车速增加, 转向盘转角几乎呈线性趋势下降, 它们共同决定临界侧翻的稳定行驶区域。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| 3 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|