{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
轨道车辆转向架一系悬挂刚度测定
[张益瑞1  , 苏建
, 苏建1 , 张兰1 , 谭富星2 , 徐观1 ]
, 苏建, 张兰|
|


作者简介:张益瑞(1986-),男,博士研究生.研究方向:汽车智能化检测与轨道交通.E-mail:zyr86913@163.com
为测定轨道车辆转向架一系悬挂的三向动、静态刚度,提出了基于转向架试验台的刚度测定试验方法,利用构架固定装置固定被测转向架构架,将一系悬挂与二系悬挂分离,对一系悬挂沿三个方向分别施加力并测量对应位移,进而计算刚度值,根据测定刚度值评估转向架一系悬挂的弹簧质量和装配关系是否符合要求。对某型号地铁拖车转向架一系悬挂的动、静态刚度进行测定试验,测得一系悬挂的三向静态刚度值和设计值的误差均在设计允许范围(10%)内,被测转向架一系悬挂符合设计要求;1#一系悬挂和2#一系悬挂的横向动态刚度随着频率增加而降低,3#一系悬挂和4#一系悬挂的横向动态刚度则在频率约为5.5 Hz和8.5 Hz时均有波动,不同轮对上动态刚度的不同是由于轮轴和轴箱的装配差异造成的,应该对被测转向架一系悬挂的装配关系进行适当调校。
To determine the primary suspension dynamic and static stiffness of railway vehicle bogie, the test principle and method were proposed based on a new bogie test bench. The primary suspension and the secondary suspension were separated by a frame-fixing device, which was supposed to fasten the frame of the bogie. Forces along three directions were imposed respectively on the primary suspension, and the corresponding displacements were measured to calculate the stiffness. According to the calculated stiffness the spring quality and assembly relationship of the primary suspension were evaluated. For a certain metro trailer bogie, the dynamic and static stiffness of the primary suspension were measured by experiments. It is shown that differences between the measured static stiffness and the designed static stiffness of the primary suspension along the three directions are within allowed range of 10%. So the tested primary suspension of the bogie meets the designing requirements. The dynamic horizontal stiffness of the primary suspension is supposed to decrease with the increase in its corresponding frequency. However unlike 1# and 2# primary suspensions, which follow the principle mentioned above, the horizontal dynamic stiffness of 3# and 4# primary suspensions both fluctuated around the frequencies of 5.5 Hz and 8.5 Hz. This difference between the wheel sets is attributed to the assembly deviation of the wheels and axle box. Therefore, the assembly relationship of the primary suspension of the tested bogie should be appropriately adjusted.
轨道车辆转向架一系悬挂的三向刚度直接关系到转向架及车辆的动力学性能[1, 2]。横向刚度、纵向横向刚度、纵向刚度影响车辆的黏着性能、蛇形稳定性及曲线通过性能; 垂向刚度影响车辆抗倾覆性能、轮重减载性能和垂向稳定性[3, 4]。在设计中, 刚度参数往往以理论计算为参考, 但在生产中, 刚度参数的获取仅靠理论计算远远不够, 零部件质量、相互装配关系等都对其有不同的影响, 必须采取试验的方法进行测定。因此, 转向架一系悬挂三向刚度的测定成为转向架设计生产成功与否的关键。
针对转向架一系悬挂刚度的测定, 欧美国家进行了较早的研究并开发了一系列试验设备, 德国Windhoff公司开发的转向架综合性能自动测试试验台可以对一系悬挂的垂向刚度进行测定; 瑞士NENCKI公司和德国西门子公司也先后开发了相关测试试验台, 但这些试验台都只能进行静态测试, 无法实现动态模拟。近年来随着我国轨道交通的迅猛发展, 国内机构开展了大量的研究工作, 左国兵等[5]针对转向架一系悬挂采用的金属-橡胶复合锥形弹簧总结了一套比较合理的试验和数据处理方法; 李志强等[6]针对某型转向架一系悬挂采用的轴箱弹簧进行了分析试验。但是, 这些研究工作都是针对一系悬挂中的弹簧单件进行的试验, 不能代表装备状态下一系悬挂的实际刚度参数。西南交通大学研发的转向架悬挂三向参数测定台以及齐齐哈尔车辆厂研发的转向架参数试验台可以实现装备条件下的刚度参数测定, 但是难以将转向架一系悬挂与二系悬挂分离开来分别测定[7, 8]。作者所在课题组研发了一种新型的转向架试验台, 能实现单独转向架装备状态下一系悬挂、二系悬挂的三向动、静态刚度以及整车落成状态下悬挂参数的测定, 解决了转向架装备状态下悬挂系统刚度参数的测定难题[9]。作者在课题组前期研究基础上, 针对轨道车辆转向架一系悬挂, 提出了一种三向动、静态刚度测定实验方法。
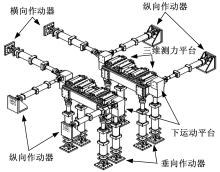
作为一种多功能的轨道车辆参数检测专用设备, 转向架试验台能够实现转向架装备条件下及整车落成状态下悬挂参数的动、静态刚度测定, 并可以实现对车辆实际线路运行工况的模拟, 试验台具有3个独立的6自由度运动平台, 上运动平台用于模拟车体加载及转向架二系悬挂刚度测定, 在转向架一系悬挂系统刚度测定试验中, 只需要其下部两个平行安置的运动平台。图1为转向架试验台下运动平台, 每个运动平台联接有一个横向作动器、2个纵向作动器、4个垂向作动器共7个作动器, 7个作动器协同动作, 实现运动平台在6个自由度的独立或者耦合运动。
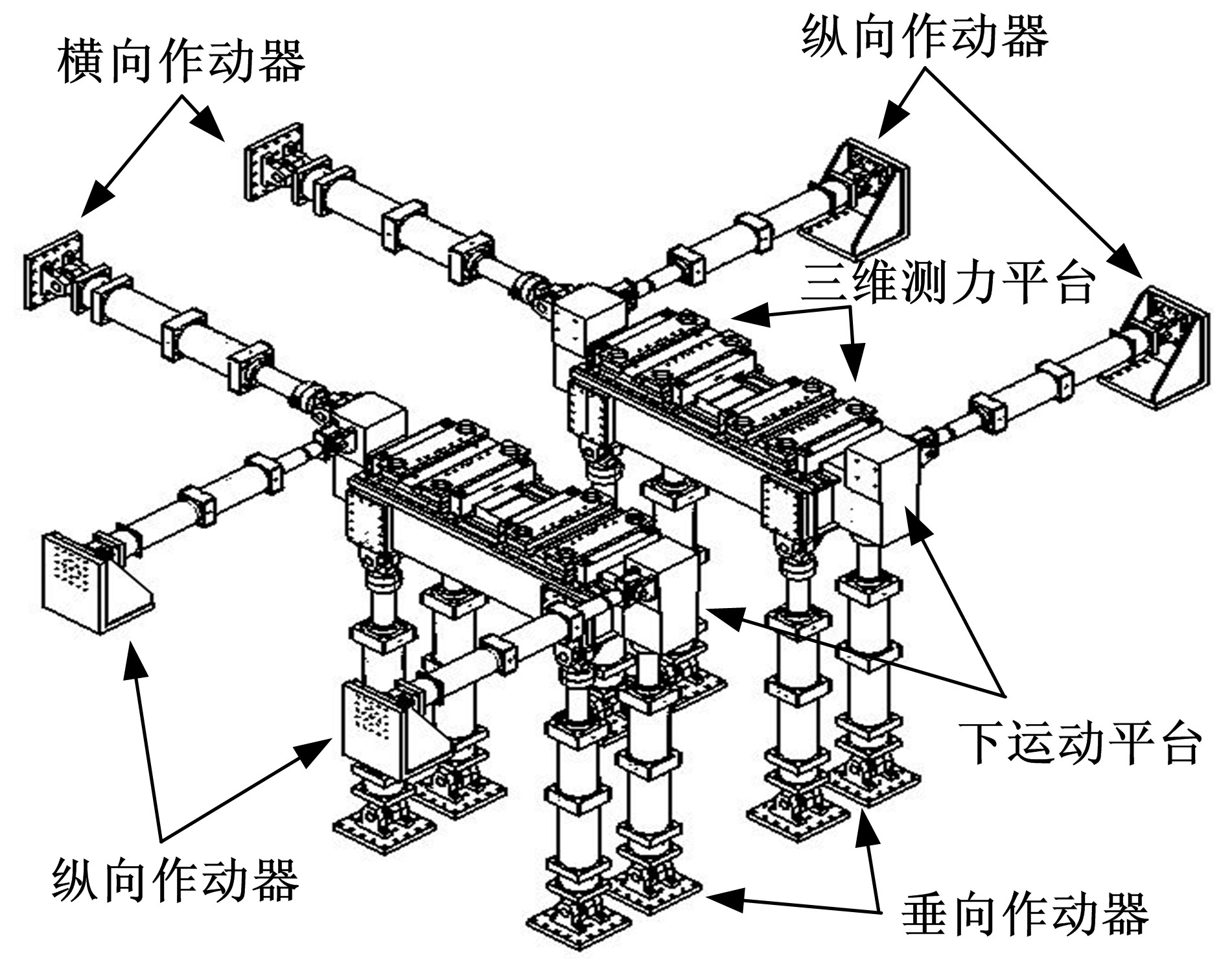 | 图1 转向架试验台下运动平台Fig.1 Lower motion platform of bogie test bench |
每个下运动平台上各安装有平行布置的两台三维测力平台, 三维测力平台将轮对固定安装到下运动平台并测定轮对受力, 测力过程中, 三维测力平台内部安装的4个测力传感器受力, 由传感器应变片的变形将力信号转化为电信号, 测力传感器并联安装, 因此三维测力平台的输出为4个传感器的信号平均值。三维测力平台分别测量横、纵、垂三个方向的作用力, 并消除各个方向作用力之间的耦合作用。
试验过程中, 转向架试验台下运动平台带动轮对沿某方向运动, 同时, 三维测力平台及位移测量系统实时测量悬挂在此方向上的力和位移, 进而完成刚度测定。
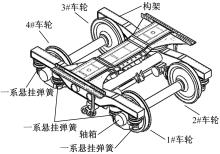
如图2所示, 被测转向架为某型地铁拖车转向架, 其一系悬挂系统结构比较简单, 构架和轴箱之间分别在靠近构架端部和远离构架端部处, 采用两个结构相同的一系悬挂弹簧并列连接, 在1#车轮、2#车轮、3#车轮和4#车轮处分别对应有1#一系悬挂、2#一系悬挂、3#一系悬挂和4#一系悬挂。
 | 图2 被测地铁转向架Fig.2 Tested metro bogie |
一系悬挂弹簧采用锥形金属橡胶弹簧, 锥形金属橡胶弹簧是金属与橡胶叠层硫化粘合而成的整体构件, 兼具金属材料和橡胶材料的优良性能, 广泛应用于地铁及低速轨道车辆转向架的一系悬挂系统中。
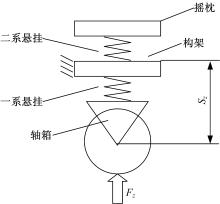
一系悬挂位于转向架构架和轴箱之间, 因此, 必须测量构架和轴箱的相对位移和对应的力值, 计算刚度值。图3为转向架一系悬挂垂向刚度测定原理, 构架固定, 对轮对施加垂向位移, 测量轮对所受垂向力
同理, 对轮对施加横向位移和纵向位移, 分别测量轮对所受横向力、纵向力以及对应轮对轴箱与构架的横向相对位移、纵向相对位移, 可以得到转向架一系悬挂的横向刚度和纵向刚度。
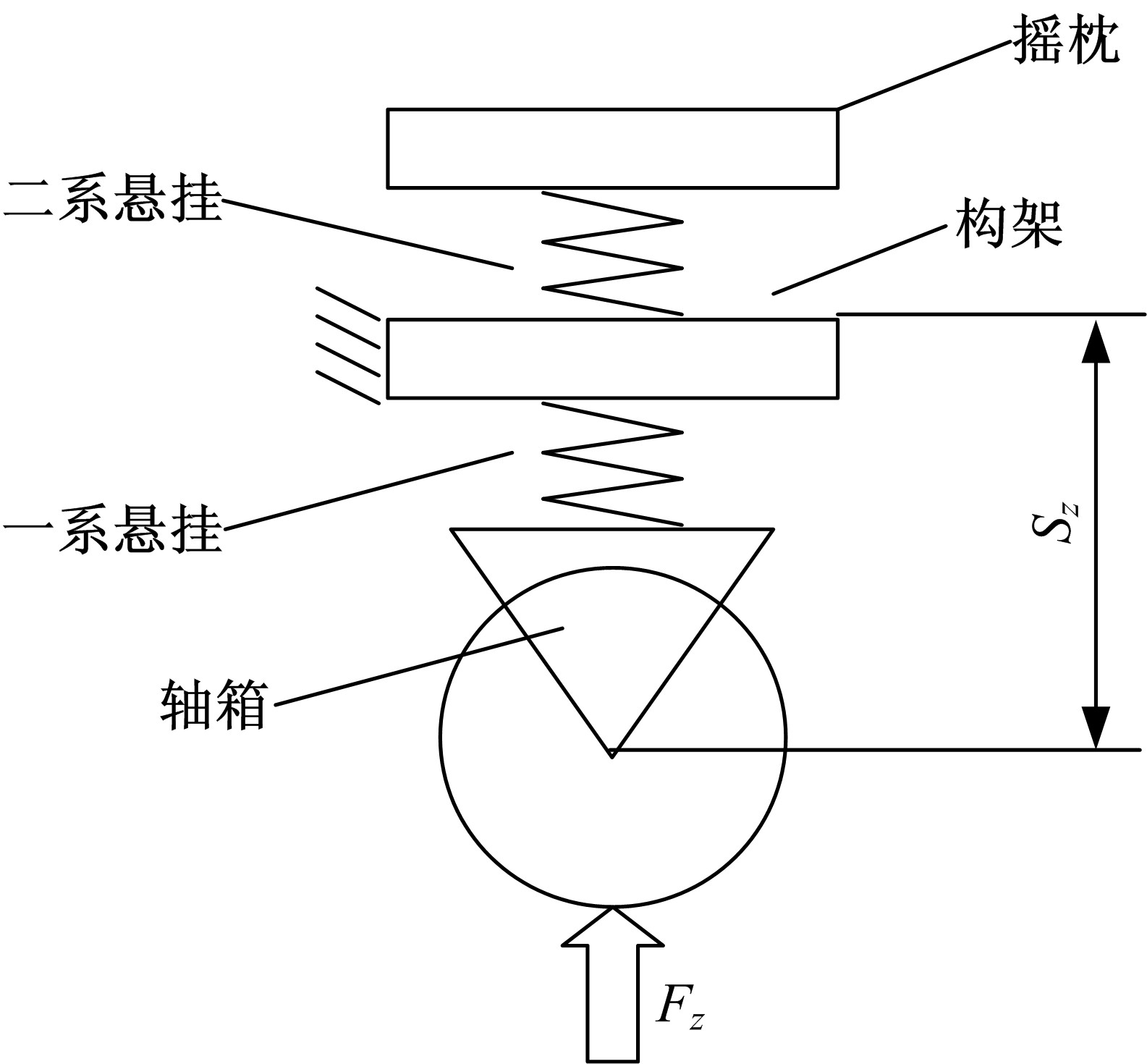 | 图3 转向架一系悬挂垂向刚度测定原理Fig.3 Principle of primary suspension’ s vertical stiffness testing |
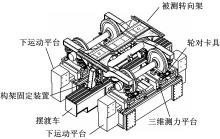
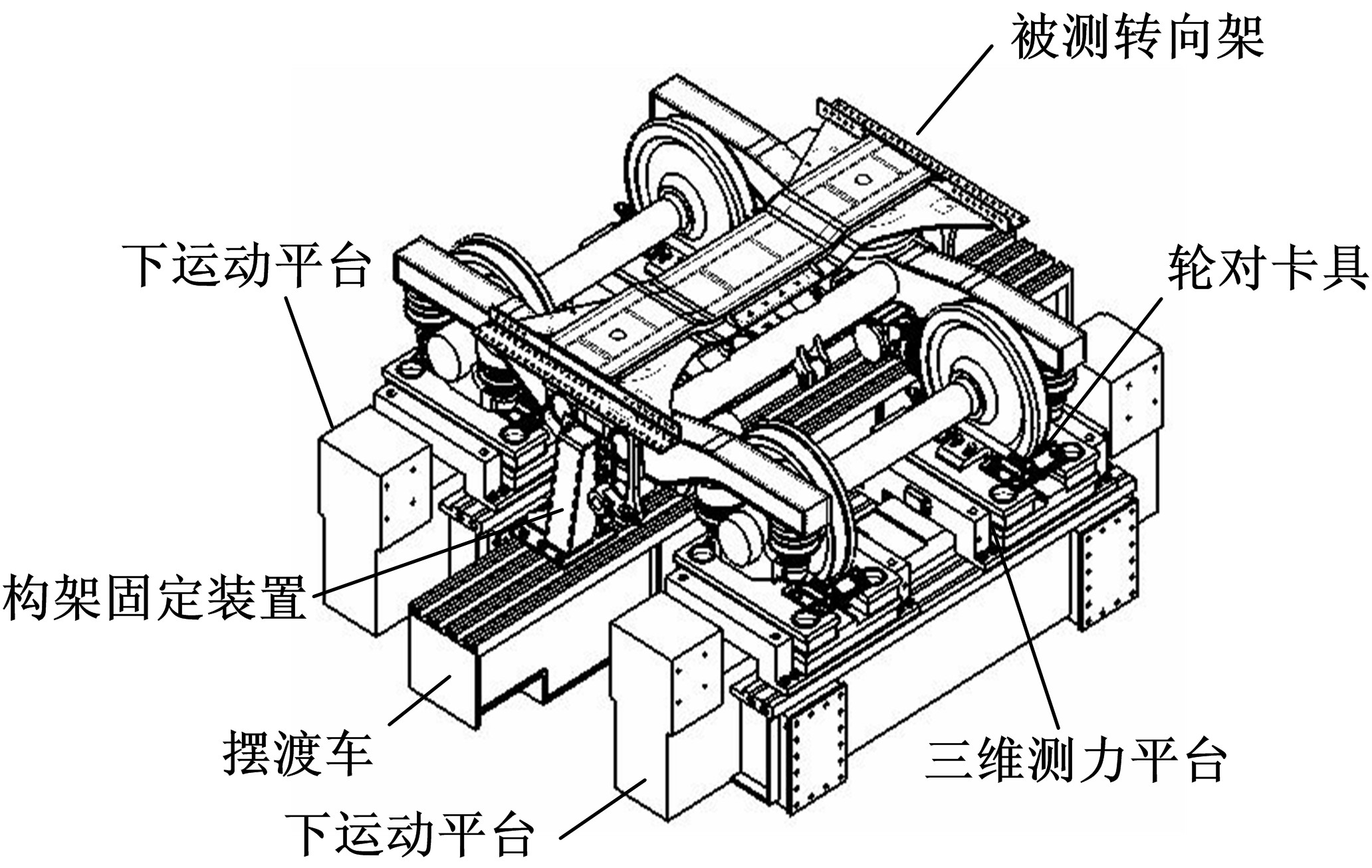 | 图4 刚度测定试验中转向架的装夹Fig.4 Clamping of tested bogie in stiffness testing |
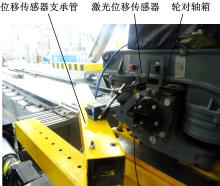
图4为刚度测定试验中被测转向架的装夹, 一系悬挂刚度测定试验中, 将转向架构架通过构架固定装置固定到静止不动的摆渡车上表面, 转向架轮对通过轮对卡具固定到下运动平台上的三维测力平台上表面, 通过下运动平台3个方向的运动带动轮对运动, 用激光位移传感器测量轴箱相对于构架的三向相对位移, 利用三维测力平台测量相对应的轮对受力, 即一系悬挂弹簧的三向受力, 计算得到刚度值。
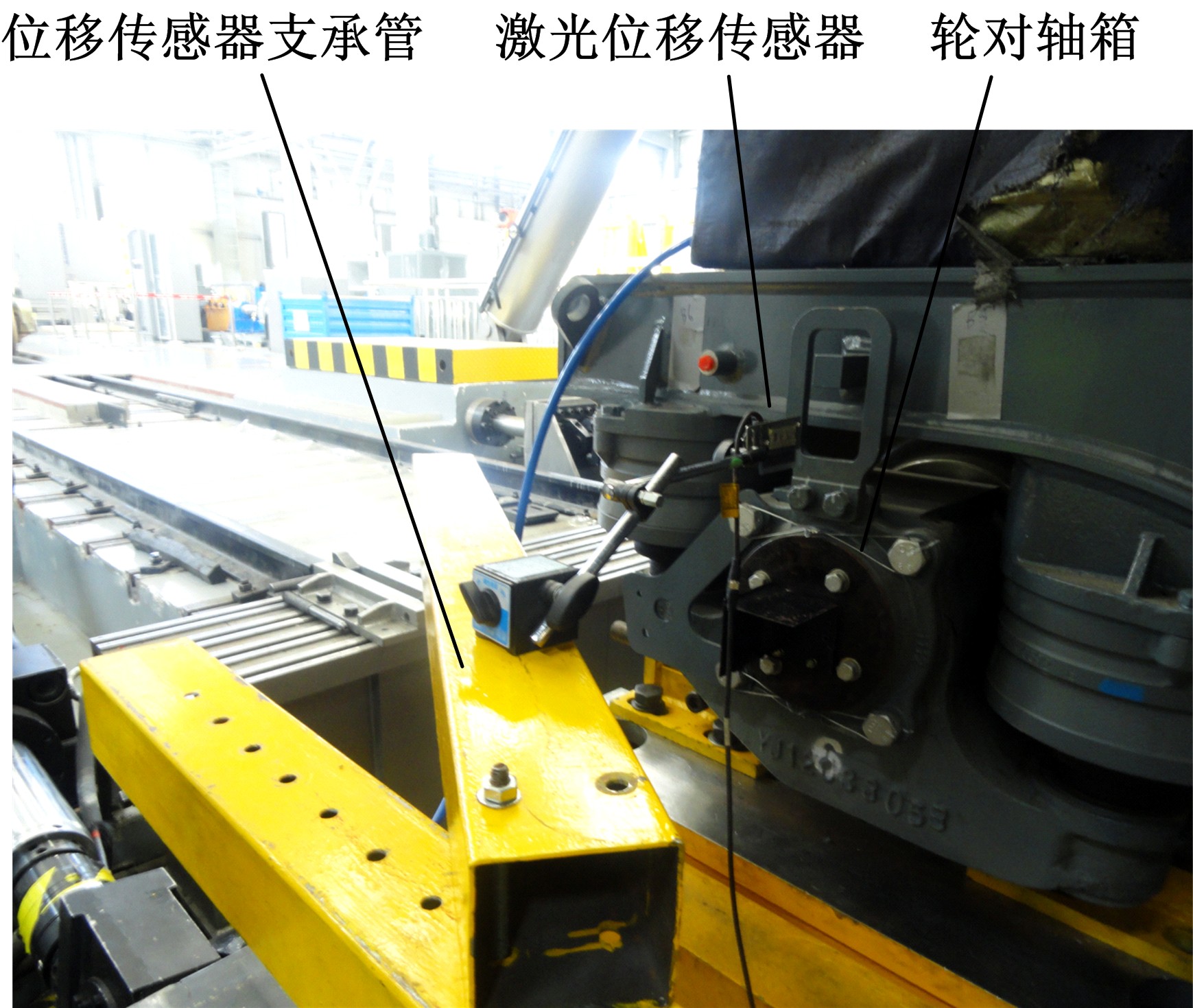 | 图5 垂向刚度测定试验中位移传感器的布置Fig.5 Arrangement of displacement sensor in vertical stiffness testing |
图5为垂向刚度测定试验中位移传感器的布置, 激光位移传感器的底座安装在位移传感器支承管上, 发射激光束垂直照射轮对轴箱的水平面, 由于位移传感器支承管固定连接到试验台地基上, 激光位移传感器测量的是轴箱相对于地基的位移, 而转向架构架相对于地基是静止不动的, 因此, 激光位移传感器的测量值同时也是转向架轮对轴箱与构架的垂向相对位移。同样的方法, 可以用激光位移传感器测量轮对轴箱与构架的横向和纵向相对位移。
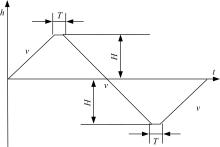
在转向架一系悬挂静态刚度测定试验中, 运动平台施加的运动波形为梯形波。图6为静态刚度测定试验中运动平台位移h的时域波形,运动平台以垂直向上为正方向,正向以速度v匀速运动至正向振幅H,停顿时间T后,以速度v反向运动至反向振幅H,停顿时间T后,以速度v 正向运动直至零位, 完成一个梯形波运动周期。
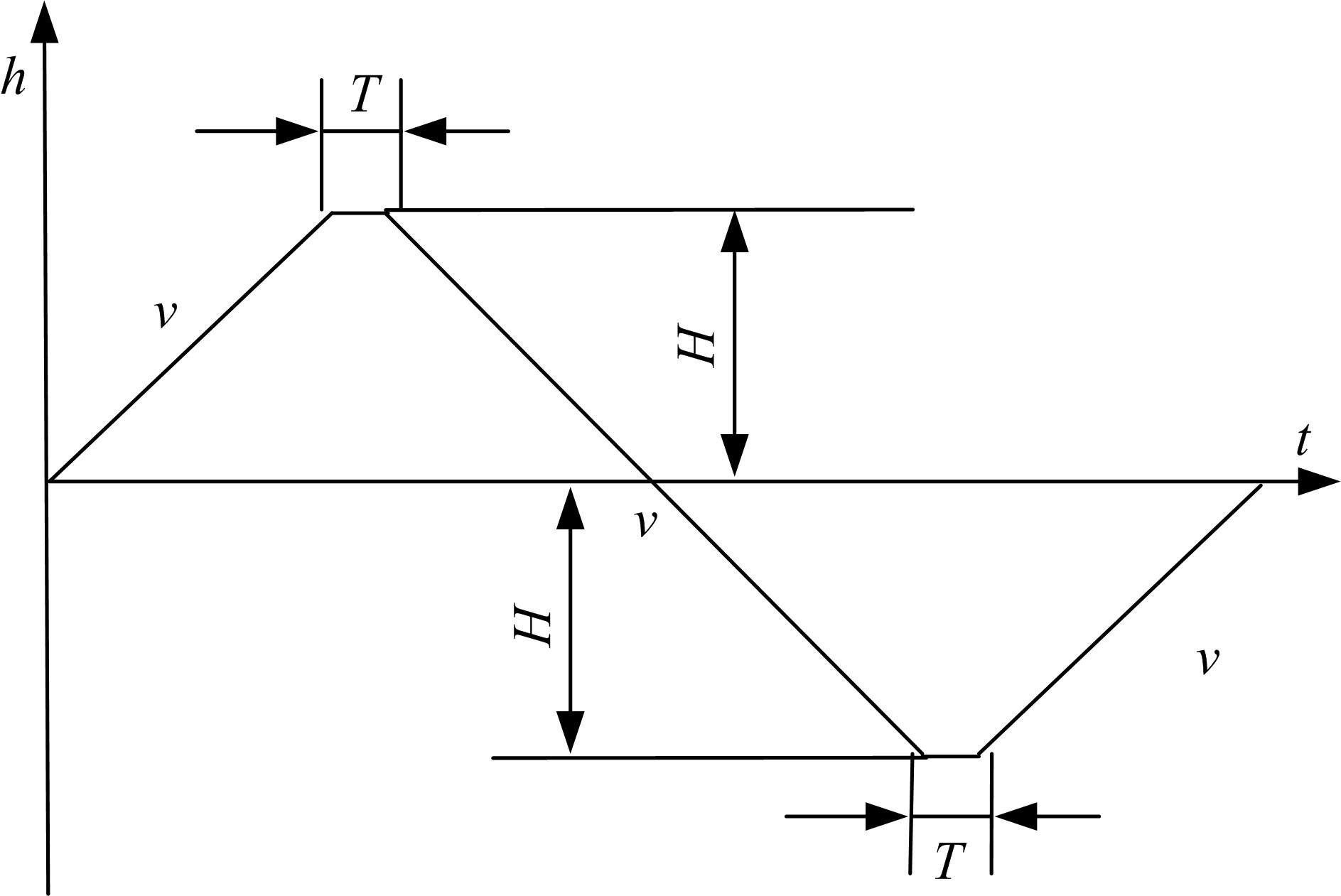 | 图6 静态刚度测定平台运动波形Fig.6 Platform movement waveform in static stiffness testing |
由于一系悬挂在横、纵、垂三个方向上的结构以及允许变形量的差异, 不同方向静态刚度的测定试验选取不同的运动振幅
| 表1 静态刚度测定运动波形参数 Table 1 Motion waveform parameters in static stiffness testing |
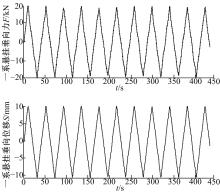
以垂向静态刚度测定为例, 运动平台以梯形波垂向往复运动多个循环, 通过三维测力平台和激光位移传感器实时测量各个车轮的垂向受力和各个车轮处轮对轴箱与构架的相对垂向位移。图7为1#车轮处三维测力平台的垂向力时域曲线和1#车轮轴箱的垂向位移时域曲线。运动平台以梯形波运动时, 三维测力平台和激光位移传感器测量值同样以梯形波同步变化。
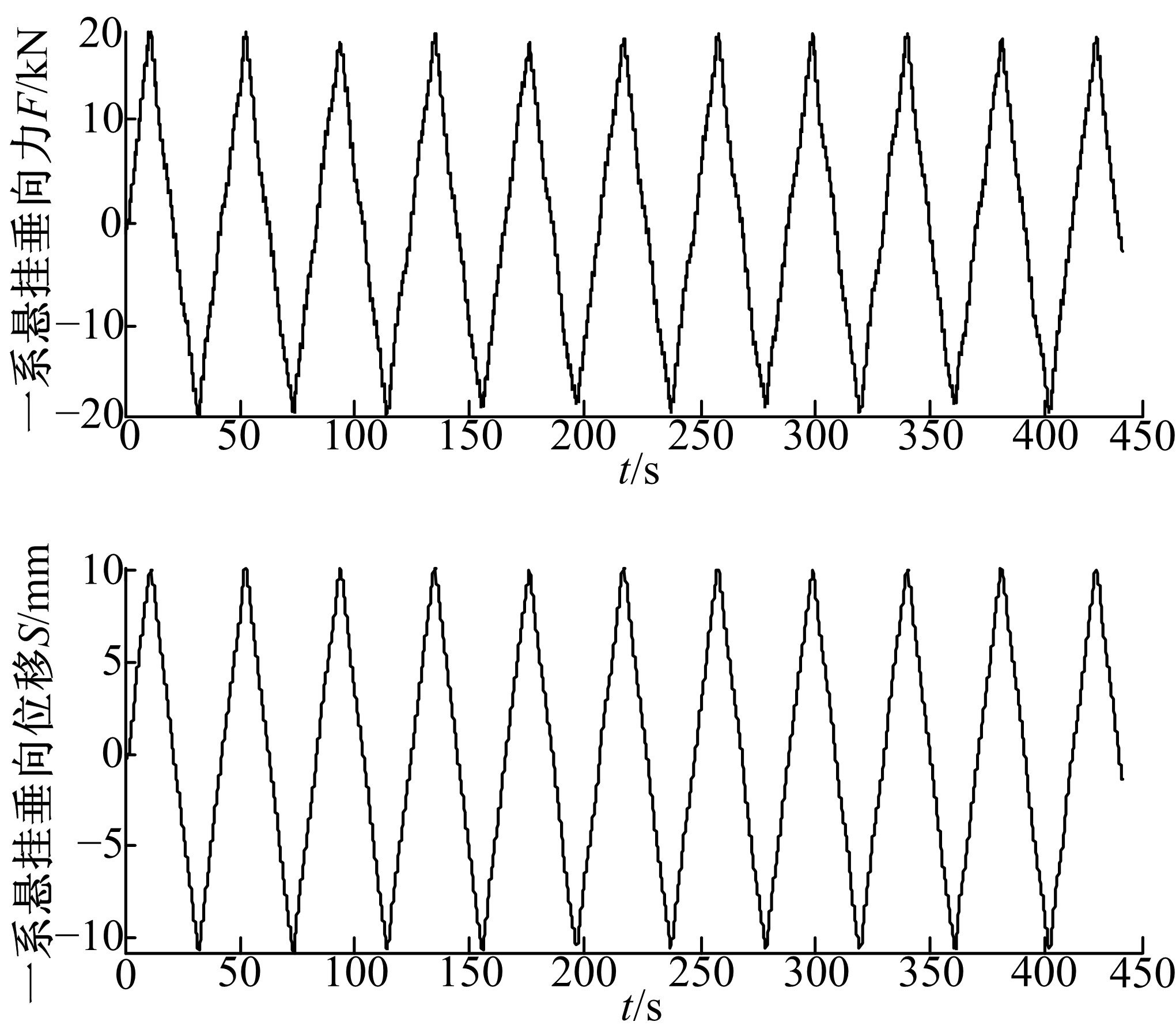 | 图7 垂向静态刚度测定试验中力与位移的时域曲线Fig.7 Time-domain curve of force and displacement in vertical static stiffness testing |
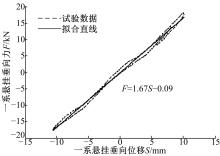
对试验数据等时分割, 分别计算单个运动周期的静态刚度, 求平均值作为试验测定的静态刚度值。图8为选取的某个单运动周期的F-S曲线,横坐标为一系悬挂垂向位移S,纵坐标为一系悬挂垂向力F虚线为试验数据, 实线为对试验数据的线性拟合直线, 其斜率为1.67, 即求得本运动循环一系悬挂的静态垂向刚度为1.67 kN/mm。
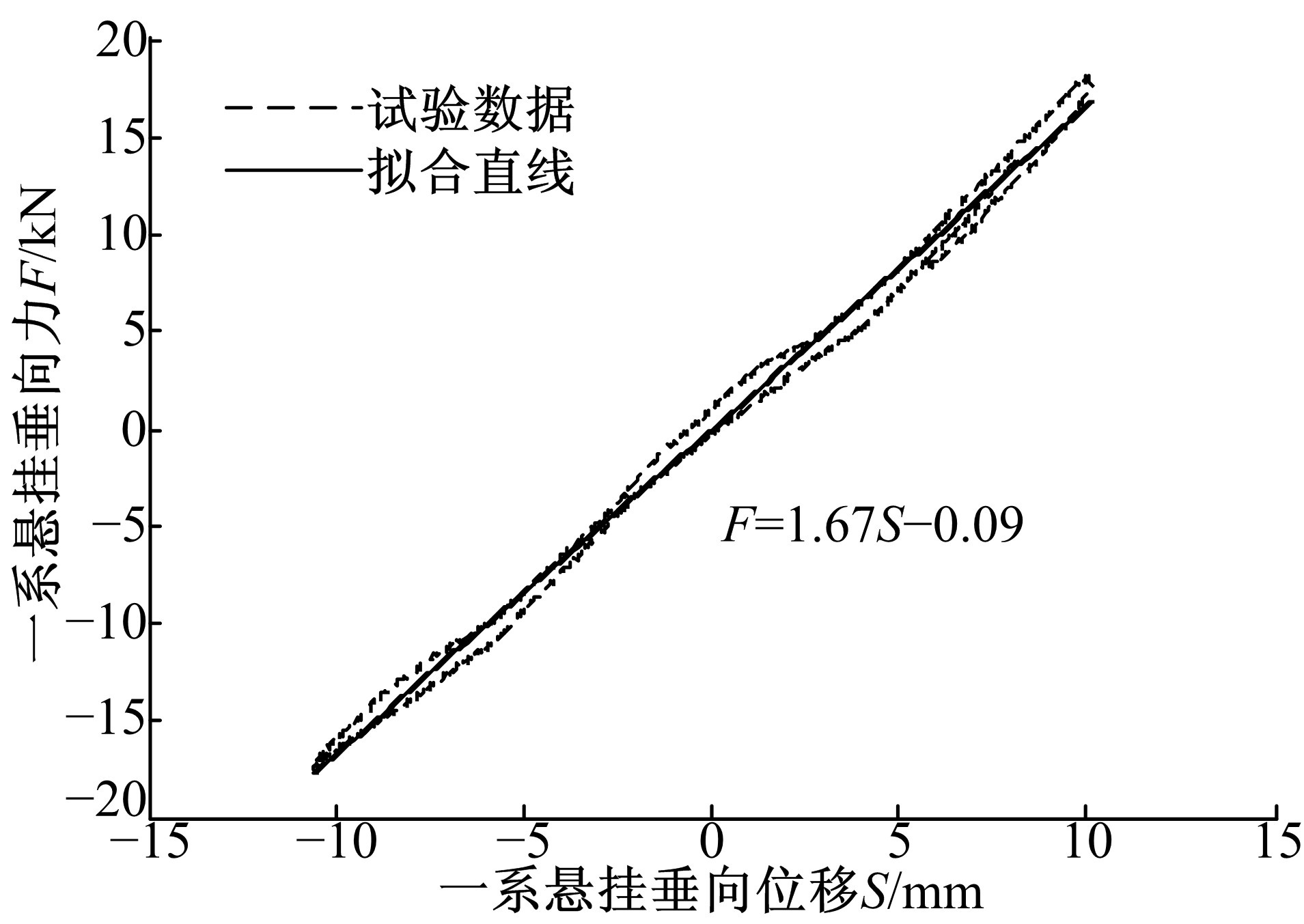 | 图8 垂向静态刚度测定试验中单运动周期的F-S曲线Fig.8 F-S curve during one single cycle in vertical static stiffness testing |
表2为本次试验(共10个运动循环)的静态刚度测定计算值, 各循环计算值相差很小, 表明试验的重复性较好, 1#一系悬挂静态垂向刚度取平均值1.68 kN/mm。
| 表2 静态刚度测定计算值 Table 2 Vertical static stiffness testing results |
依据类似的试验测定及数据处理方法, 得到被测转向架4个轮对处一系悬挂的横向、纵向、垂向3个方向的静态刚度, 并与转向架设计部门提供的设计值做对比。表3为一系悬挂静态刚度测定计算值, 4个轮对处一系悬挂3个方向的静态刚度计算值与设计值的相对误差均小于设计部门所要求的10%的允许误差, 说明被测转向架一系悬挂满足设计要求; 4个轮对处一系悬挂横向静态刚度计算值和垂向静态刚度相互间差别不大, 但是1#轮对处一系悬挂纵向静态刚度计算值(7.42 kN/mm)与2#轮对处一系悬挂纵向静态刚度计算值(8.45 kN/mm)差别较大, 说明被测转向架1#轮对和2#轮对处的两处一系悬挂选用的弹簧质量或者安装尺寸有明显不同, 应该重新安装调校, 使得被测转向架的一系悬挂的各向刚度分布更为均匀。
| 表3 一系悬挂静态刚度测定值 Table 3 Primary suspension’ s vertical static stiffness testing results |
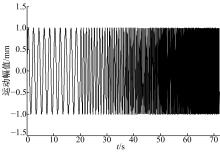
转向架一系悬挂动态刚度测定试验与静态刚度测定试验的试验方法及传感器布置方式相同, 同样由下运动平台施加运动, 测量运动过程中一系悬挂的各向受力和对应的轴箱与构架的相对位移来计算动态刚度, 不同之处在于运动波形为阶梯状变频的正弦波。图9为动态刚度测定试验中运动平台的运动波形, 正弦波振幅为1 mm, 频率为0.5~10 Hz, 频率间隔为0.5 Hz, 每频率下持续运动10个循环。
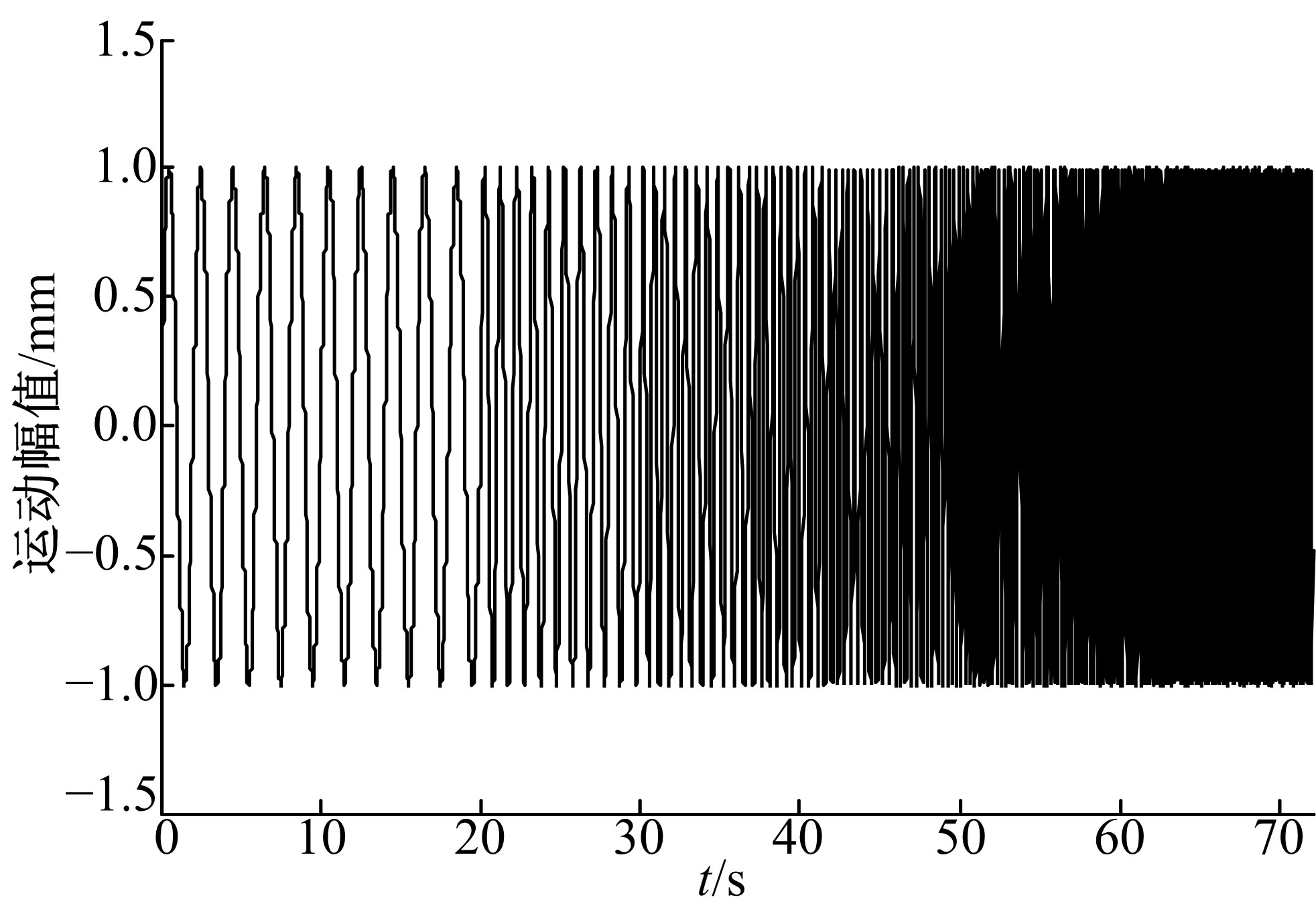 | 图9 动态刚度测定平台运动波形Fig.9 Platform movement waveform in dynamic stiffness testing |
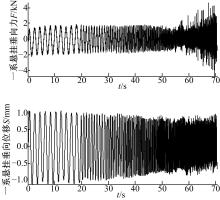
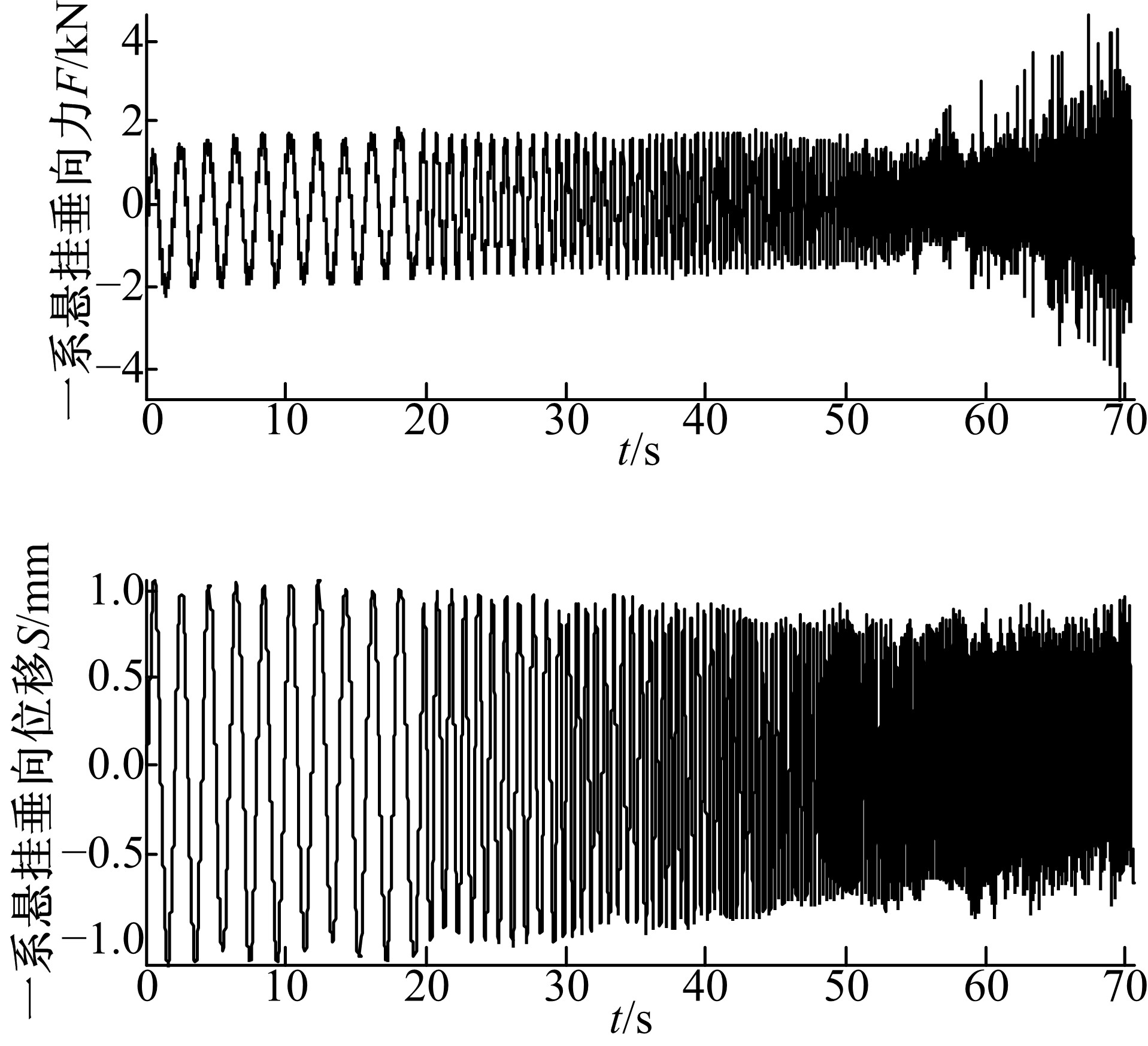 | 图10 垂向动态刚度测定试验中力与位移的时域曲线Fig.10 Time-domain curve of force and displacement in vertical stiffness testing |
以垂向动态刚度测定为例。图10为1#车轮处三维测力平台的垂向力测量值和1#车轮轴箱的垂向位移测量值。下运动平台以正弦波运动时, 三维测力平台和激光位移传感器测量值同步变化, 在低频阶段, 二者的变化遵循正弦波形且振幅保持稳定, 随着频率增加, 垂向力测量值的振幅先减小再增加, 垂向位移的振幅持续减小, 垂向力和垂向位移的高频波形中都夹杂了不规律的成分, 导致波形混乱, 这与试验台以及三维测力平台的动态工作特性有关, 进行刚度计算时应该适当地进行滤波处理, 去除干扰成分。
类似地, 通过绘制运动循环
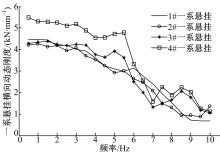
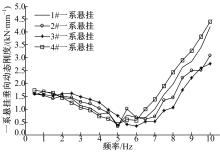
图11为不同频率下一系悬挂横向动态刚度测定值, 随着频率的增加, 动态刚度值总体上降低, 1#一系悬挂和2#一系悬挂的动态刚度基本上随着频率增加而持续降低; 3#一系悬挂和4#一系悬挂的动态刚度则在频率约为5.5 Hz和8.5 Hz均有波动; 1#一系悬挂和2#一系悬挂处于同一条轮对; 3#一系悬挂和4#一系悬挂处于同一条轮对, 这种不同轮对动态刚度的不同是由于轮轴和轴箱的横向装配差异造成的, 应该对被测转向架一系悬挂的横向装配关系进行调校。
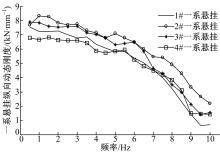
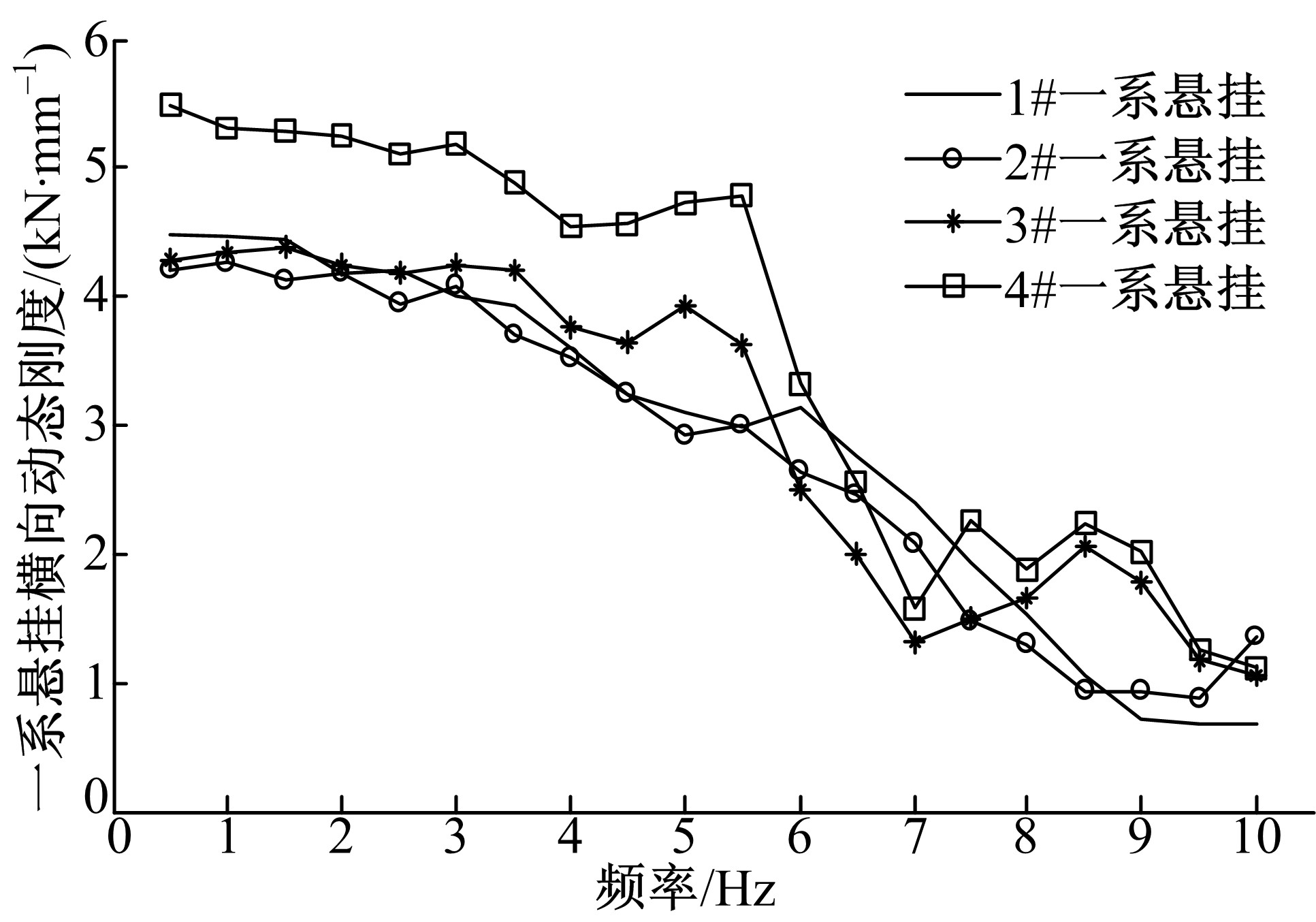
图12为不同频率下一系悬挂纵向动态刚度测定值, 随着频率的增加, 动态刚度值降低, 并且4个位置的一系悬挂动态刚度变化趋势类似, 说明被测转向架一系悬挂的纵向装配关系是相同的。
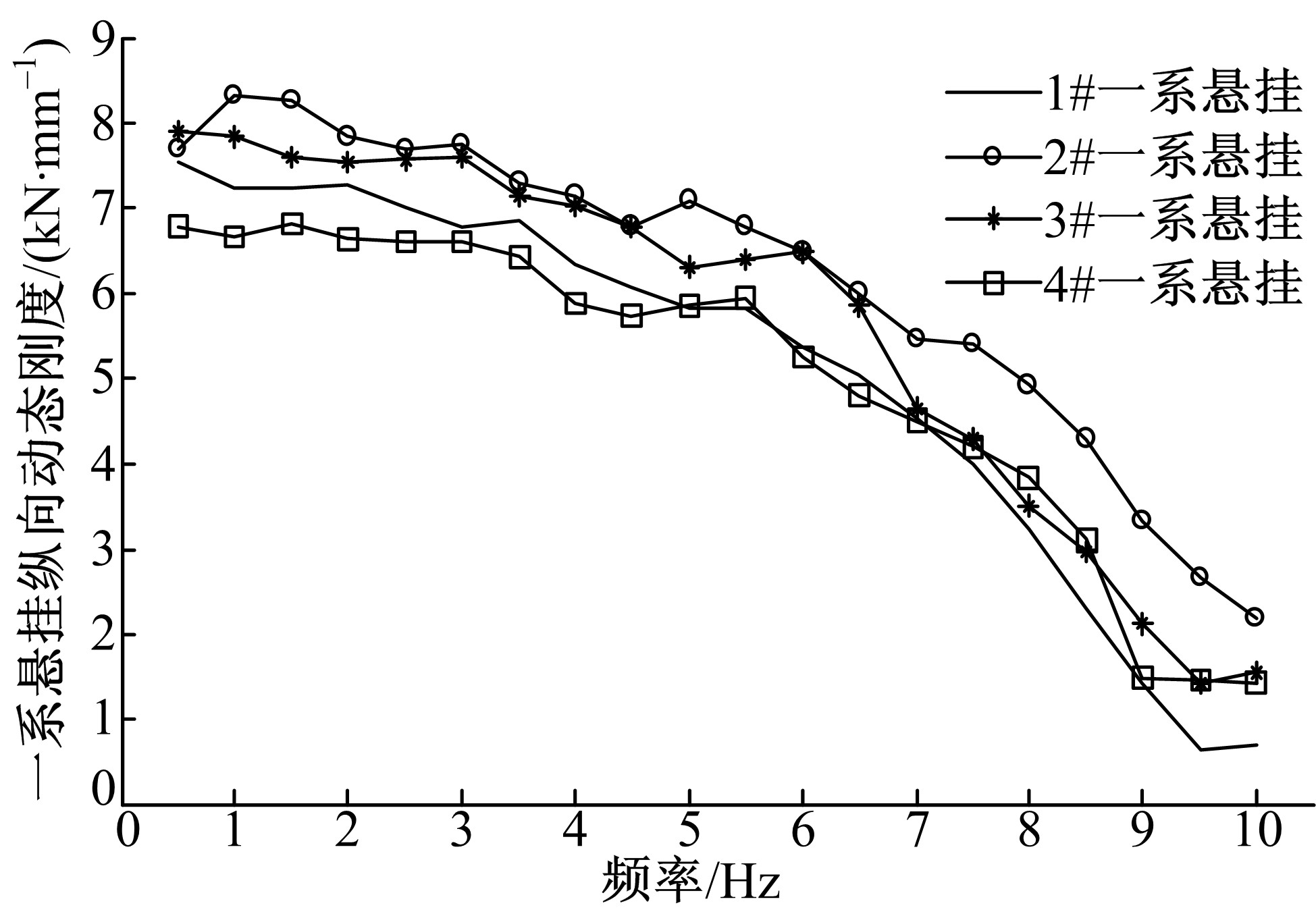
图13为不同频率下一系悬挂垂向动态刚度测定值, 随着频率的增加, 相应动态刚度值先降低, 在5.5 Hz左右达到波谷, 然后持续上升, 并且4个位置的一系悬挂动态刚度变化趋势类似, 说明被测转向架一系悬挂的垂向装配关系是相同的。
基于转向架试验台, 提出了转向架一系悬挂三向动、静态刚度的测定方法。针对某地铁拖车转向架完成了测定试验, 并对试验结果进行了分析:4个轮对处一系悬挂的静态刚度测定值与设计值的相对误差均小于设计部门所要求的10%的允许误差; 一系悬挂的横向、纵向和垂向动态刚度值随着频率分别呈现降低、降低和先降后增的总体趋势。本文试验方法可以满足轨道车辆转向架一系悬挂动、静态刚度的测定要求, 为转向架设计和制造提供必要的试验依据。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|