

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
压缩编码孔径红外成像超分辨重建
[王新华1, 2  , 欧阳继红
, 欧阳继红1 , 庞武斌2 ]
, 欧阳继红, 庞武斌|
|


作者简介:王新华(1984-),男,工程师,博士研究生.研究方向:计算光学与机器视觉.E-mail:xinhuajlu@163.com
为了利用低分辨率红外探测器获取高质量图像信息,对基于频谱面的压缩编码孔径成像方法和超分辨率图像重建算法进行了研究。首先,在频谱面加入孔径编码器,通过傅里叶变换对采样图像信号进行编码压缩。然后,利用光学成像系统的分片光滑性,实现信号在傅里叶变换域的稀疏表示。最后,提出了两点步长梯度法与自适应非单调线搜索策略相结合的梯度投影并行加速算法,用于完成对稀疏信号的超分辨重建。实验结果表明,该算法能够以远小于原始信号的数据量重建出高分辨率图像信息。
In order to obtain high quality image information using infrared detector with low resolution, a compressive coded aperture imaging method based on the frequency spectrum plane and the Supper Resolution Image Reconstruction (SRIR) algorithm was investigated. First, the aperture encoder was added to the frequency spectrum plane, and the image sampling signal was compressive coded by Fourier transform. The, by virtue of the piecewise smooth of the optimal imaging system, the signal sparse representation was realized based on Fourier transform domain. Finally, the SRIR of the sparse signal was completed by improved Gradient Projection for Sparse Reconstruction (GPSR) parallel acceleration algorithm, which combined with GPSR-BB algorithm and adaptive non-monotone line search strategy. Experimental results indicate that the high resolution images can be constructed with information far less than that of the original signal.
焦平面探测器是影响红外成像分辨率的核心器件, 因其结构异常复杂, 从硬件角度提高探测器分辨率难度极大。如何利用探测器有限的资源获取高质量的图像信息成为一个亟待解决的技术瓶颈。压缩感知(Compressed sensing, CS)理论的提出突破了传统奈奎斯特采样定理的限制[1], 使得通过低分辨率探测器获取高分辨率图像信息成为可能。近些年, CS理论在压缩成像、医疗成像和雷达成像等领域得到了广泛的应用[2, 3, 4], 比较有代表性的成果是美国Rice大学研制的单像素相机[5], 此外文献[6]详细阐述了光学压缩成像系统研究进展, 并对今后面临的挑战性问题进行了探讨。
针对红外成像系统分辨率低、信号受噪声干扰严重等问题, 基于CS理论提出了压缩编码孔径红外成像超分辨重建方法。首先, 在频谱面加入孔径编码器, 通过傅里叶变换对采样图像信号进行编码压缩和稀疏表示。然后, 采用两点步长梯度法与自适应非单调线搜索策略相结合的梯度投影稀疏重构并行加速算法, 完成对欠采样信号的超分辨重建。实验结果表明, 该方法能够以远小于原始信号的数据量重建出高分辨率的图像信息, 并表现出较好的实时性, 具有一定的工程应用价值。
CS理论的基本原理是只要信号在某个正交变换空间具有稀疏性, 就能以较低的频率
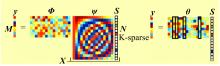
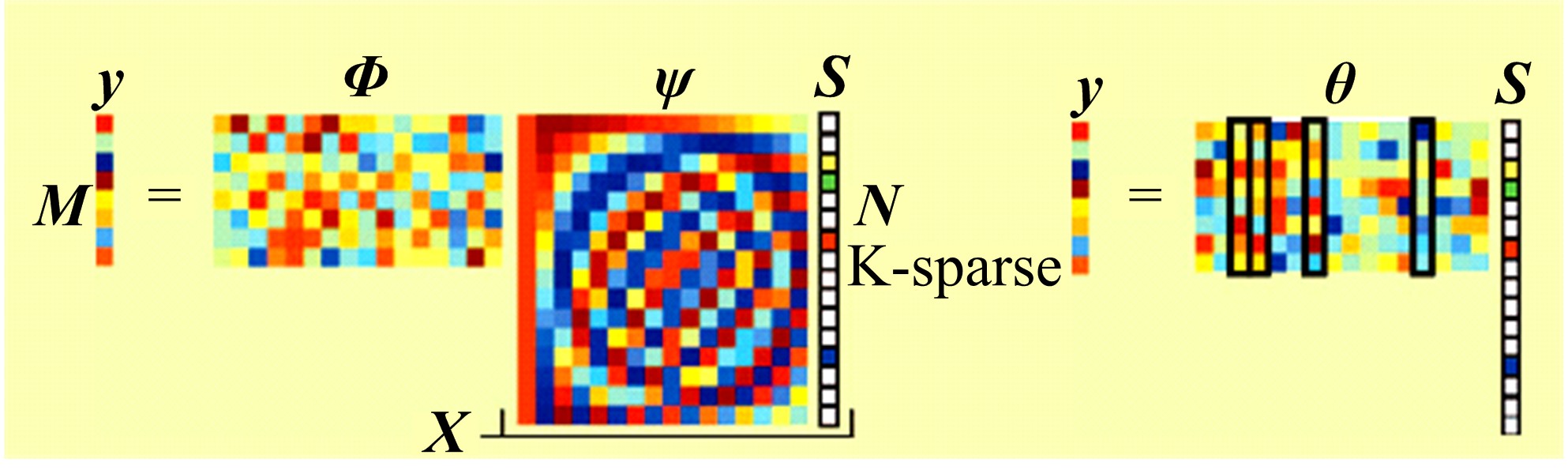 | 图1 压缩传感原理图Fig.1 Principle of compressed sensing |
压缩传感方程为 y=ΦX=ΦΨs=Θs,将原来的观测基矩阵Φ变换为Θ=ΦΨ(称之为传感矩阵),解出s逼近值s',则重构后原信号为X'=Ψs'。
压缩传感理论涉及以下几个方面[7]:
(1)信号的稀疏表示。只有信号是K稀疏的,才有可能在观测M个观测值时,根据K个较大的系数重建原始长度为N)的信号。稀疏表示方法包括:多种变换域分析方法和冗余字典学习方法等。
(2)观测矩阵的设计。观测矩阵Φ与稀疏矩阵Ψ的乘积满足RIP性质(有限等距性质), 这个性质保证了观测矩阵不会把两个不同的K稀疏信号映射到同一个集合中。对于K稀疏的原始信号s,存在实数δk∈(0,1),)使得式(1)成立:
观测矩阵 Φ与稀疏矩阵Ψ的乘积满足RIP性质。观测矩阵选取的原则如下:①观测矩阵Φ与稀疏矩阵Ψ的乘积满足RIP性质, 这就要求矩阵 Φ与矩阵Ψ最好不相关;②观测矩阵Φ对应物理硬件,因此观测矩阵Φ的选取必须易于硬件实现; ③矩阵 Φ与矩阵Ψ最好不相关;②观测矩阵Φ对应物理硬件,因此观测矩阵Φ是一个性质非常好的观测矩阵, 光学成像中, DMD对应于该矩阵的硬件实现。
(3)重构算法的设计。信号重构过程一般转换为一个最小
式中:
Willett等[8]提出了基于CS理论的采用频谱编码的方法, 利用大于探测器分辨率的相位板对图像傅里叶频谱进行编码, 探测器记录编码后的图像信息, 通过重构算法可以恢复得到一个与相位板分辨率一样的红外图像。
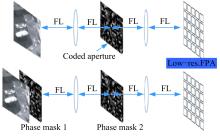
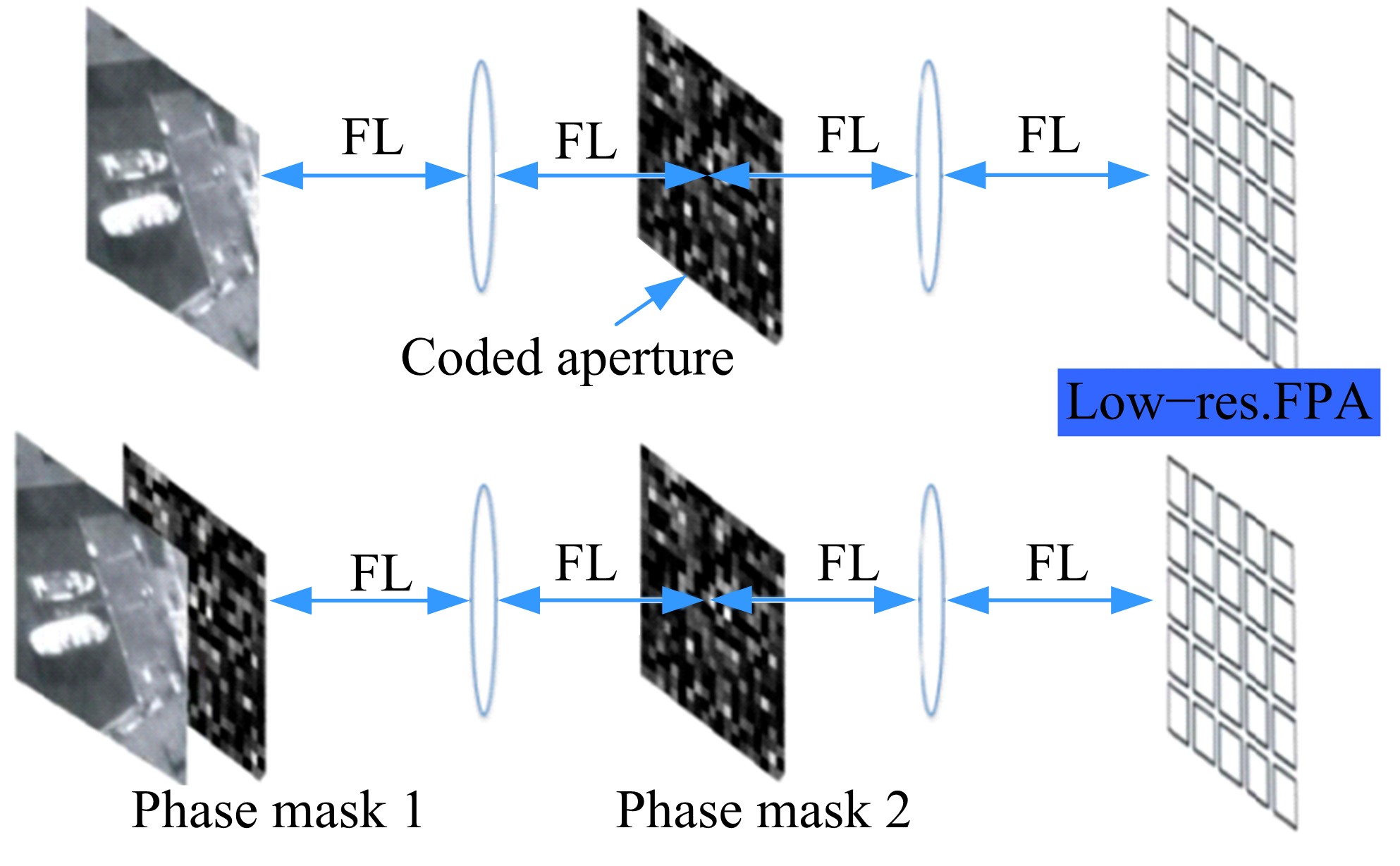 | 图2 编码孔径成像原理Fig.2 Principle of coded aperture imaging |
如图2所示, 在红外成像的傅里叶频谱面加入孔径编码器, 编码器可以是空间光调制器或掩膜版, 在此过程中编码器会对光场中的高频成分进行编码, 被编码的频率带宽远大于探测器的奈奎斯特频率带宽, 只要通过合适的重构算法, 就可以恢复出高于探测器频率的红外图像, 也就是利用低频率的探测器实现了高频率的图像恢复。在硬件实现上, 在成像系统的频谱面上设置编码板, 编码板可以采用石英基地上镀铬, 然后用光刻的方法制作编码图案。
CS理论下的编码孔径成像, 探测器观测到的图像信号的表达式为:
式中:R为观测矩阵;f为图像原始信号;D为欠采样操作;A为编码孔径矩阵,其中A的表达式为:
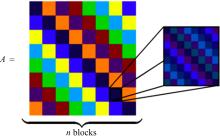
式中:F(-1) 为傅立叶逆变换;Cp 为光学传递函数;F为傅立叶变换。如图3所示,矩阵A具有行元素循环特性,对于具有行元素循环特性的矩阵,只要行中每个元素都来自于某一分布(如高斯分布、均匀分布等),则A可以以非常高的概率满足RIP条件。
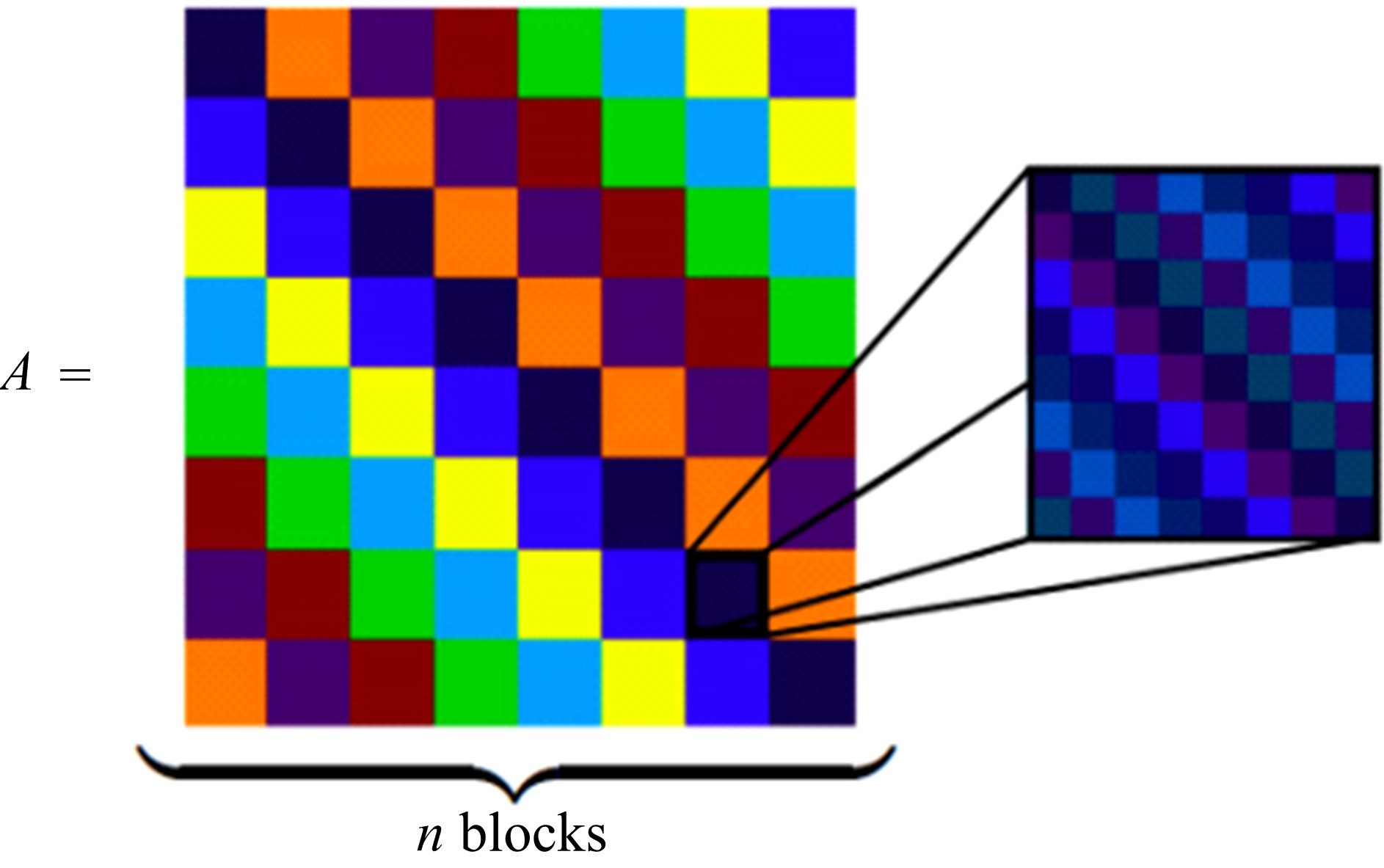 | 图3 观测矩阵特征Fig.3 Feature of observation matrix |
矩阵
编码板图案p是生成观测矩阵R的关键,同时也是成像系统硬件实现的核心器件,A可以以非常高的概率满足RIP性质,这个性质保证了观测矩阵不会把两个不同的K稀疏信号映射到同一个集合中。
编码板图案设计步骤如下:
Step1 用高斯分布函数随机生成矩阵A,因为矩阵A具有块循环性质, 实际只需要生成一行元素, 其他只需要交替循环即可。
Step2 解线性方程
Step3 对
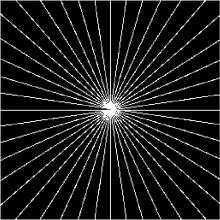
如图4所示, 计算得到的编码图案
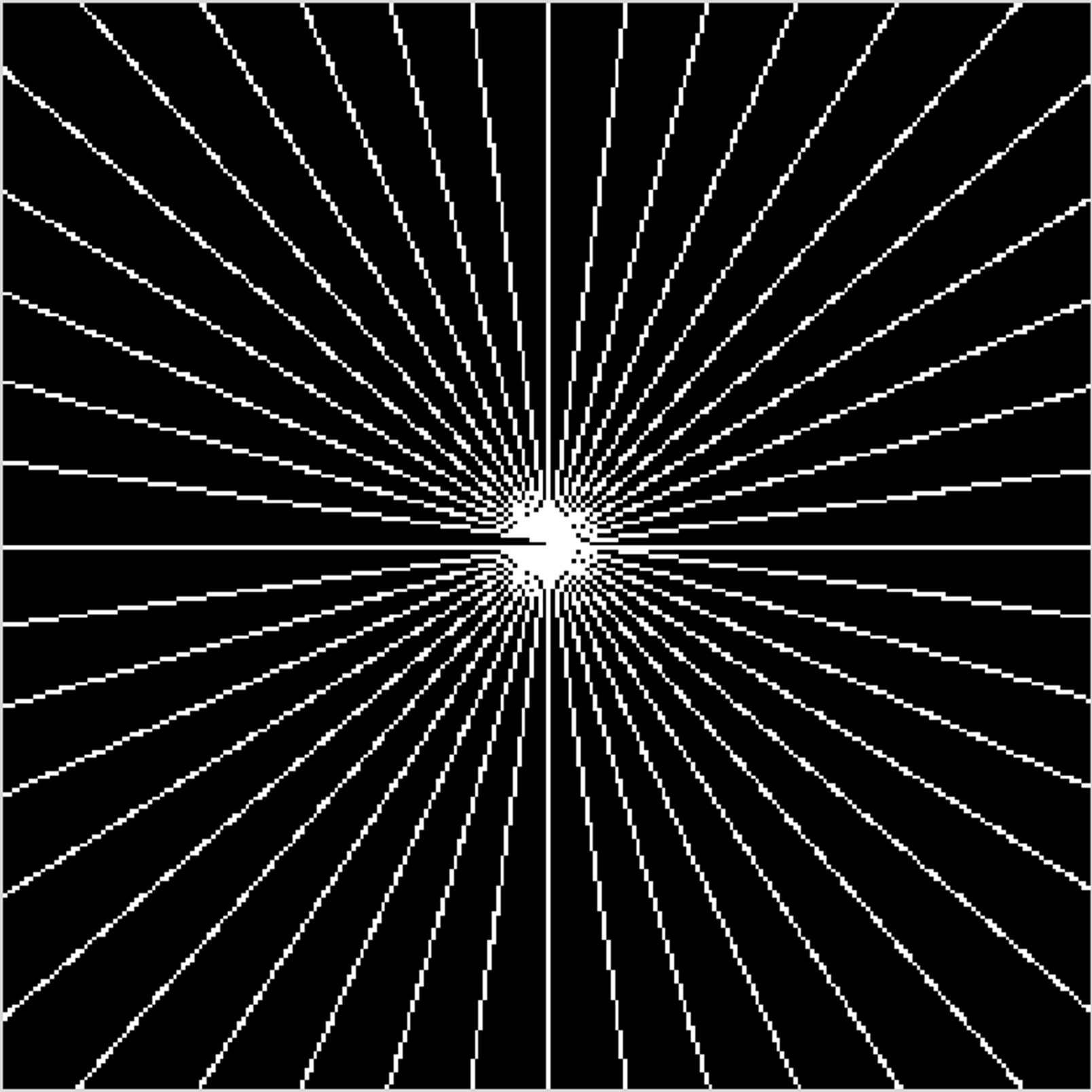 | 图4 编码板图案示意图Fig.4 Pattern of coded plane |
从图4所示的图像数据采集过程可知, 利用压缩编码孔径成像方法可以有效降低数据采集量。
由于经过编码孔径成像系统所生成的数字信号是欠采样的, 并且所有成像系统的退化点扩展函数都无法准确获得, 将稀疏表示信号利用图像的超分辨重构(Super resolution image reconstruction, SRIR)技术可以将低分辨率图像重建成远大于探测器分辨率的超分辨率图像[9, 10, 11, 12, 13], 该过程如图5所示。
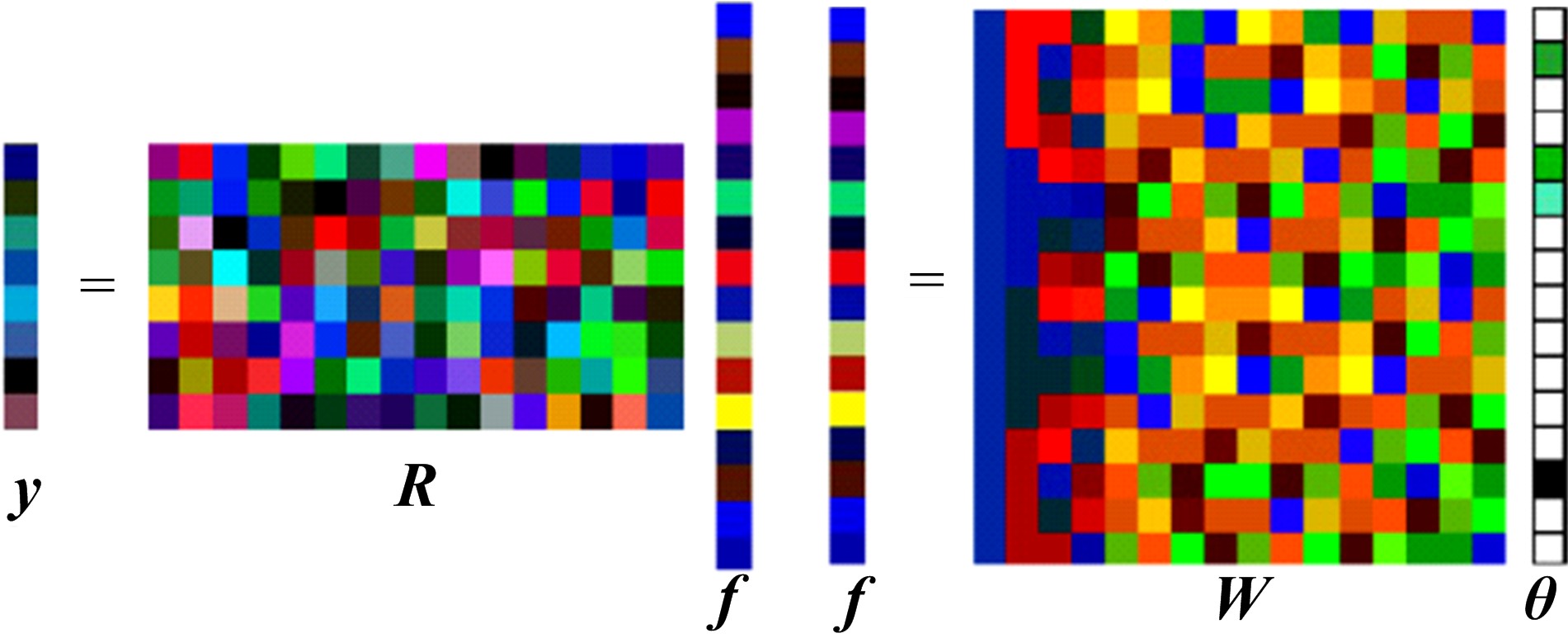 | 图5 超分辨图像重建原理Fig.5 Principle of SRIR |
图5显示了从有限的观测数据y中恢复原始信号f,通过采用k×n阶观测矩阵R,其中k≪n,k代表观测数据的大小,n代表恢复数据的大小。通过观测图像重建出高分辨率图像需满足以下条件:①观测图像在变换基下具有稀疏性,
在CS理论下, 图像的超分辨重建需要求解欠定方程组
当 p=0时得到0-范数问题,于是在信号f稀疏并且可压缩的前提下,求解欠定方程组Y=ACS f)的问题就转化为最小0-范数问题:
然而,只有通过计算出f中的所有非零项位置的
求解式(4)通常采用合并一个正则项即通过罚函数思想求解非线性优化问题, 目标函数表达式如下:
式中: A=R×W是M×N阶矩阵;y为观测向量;x为未知向量;τ>0为正则化参数。
令
式中:
式(6)可以进一步转化为标准的带约束的二次规划模型:
式中:
针对上述带约束的二次规划模型, 为了同时满足成像系统在工程应用时快速、有效、精确性高的要求, 需平衡重构效率与质量要求的关系, 本文采用梯度投影稀疏重构(Gradient projection for sparse reconstruction, GPSR)算法求解目标函数。
GPSR算法属于凸优化方法, 该算法于2007年由Figueiredo等[16]提出, 算法主要思想是当迭代点在可行域内部时, 取该点处的负梯度方向为可行下降方向。当迭代点在可行域边界上时, 取该点处负梯度方向在可行域边界上的投影形成一个可行下降方向。在每次迭代时, 沿着负梯度的方向进行寻优搜索, 从而寻找到目标函数的最小值, 解出新的可行点, 逐步迭代直到寻找到全局最优解。
GPSR算法计算步骤如下:
Step1 参数初始化。给定初始点
Step2 梯度投影。如果
Step3 线搜索。计算新的点xk+1=xk+λdk,其中,λk∈(0,1]。
Step4 终止测试或更新。如果||xk+1-P(xk-ak ∇f(xk))||=0,则算法终止;否则,计算ak∈[amin,amax],
GPSR算法计算效率主要由
3.3.1 两点步长梯度法
两点步长梯度法是求解式(4)无约束优化问题非常有效的方法[17], 对于
Step1 令
Step2 令
令
3.3.2 非单调线搜索策略
由于BB法的目标函数具有非单调性, 通过引入自适应非单调线搜索策略, 可保证GPSR-BB的全局收敛和计算效率[18], 计算过程如下:
Step1 令
式中:
Step2 在式(10)中加入权重系数并得到改进的自适应线搜索条件, 如式(11)所示:
Step3 得到新的非单调线搜索条件为:
式中:
在式(12)中, 当
3.3.3 加速算法计算步骤
基于BB法与自适应非单调线搜索策略相结合的梯度投影并行加速算法(IGPSR-BB)过程如下:
Step1 参数初始化。
给定初始点
Step2 梯度投影。并行计算搜索方向:
Step3 非单调线搜索。
(1)令
(2)如果满足式(12)的约束条件, 则:
(3)否则, 令
Step4 修正
(1)计算
(2)如果
(3)否则, 令
Step5 终止测试或更新。
(1)如果
(2)否则, 令 k=k+1,返回到Step2。
IGPSR-BB优于GPSR算法的原因是引入BB步长梯度法并对目标函数能够进行自适应的非单调线性调整, 从而能够加快目标函数寻优速度, 提高算法的收敛效率, 并最终加快信号重构速度。
实验测试采用的操作系统为Windows 7旗舰版64位SP1; 处理器为Intel Core i7-4790K 4.00 GHz四核; 内存为16 GB(DDR3 1333 MHz); 显卡为NVIDIA GeForce GTX 980(4095 MB/华硕); 开发工具为Visual Studio 2010, 程序设计语言为C++。
为了对IGPSR-BB算法的性能进行验证, 随机选取实拍红外图像样本集进行超分辨实验测试, 并与GPSR、GPSR-BB算法进行比较。
(1)编码孔径成像
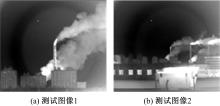
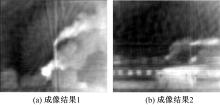
首先, 从红外成像系统实拍的500张图像中随机选取20幅图像并将尺度放大3倍组成测试样本集。然后, 从20幅图像中选取2幅场景相对复杂的代表性图像作为超分辨重建效果示例, 如图6所示。最后, 利用图4所示的编码孔径图案, 采用基于傅里叶变换的频谱面编码孔径成像方法对图6所示图像进行编码孔径成像, 获取成像结果如图7所示。
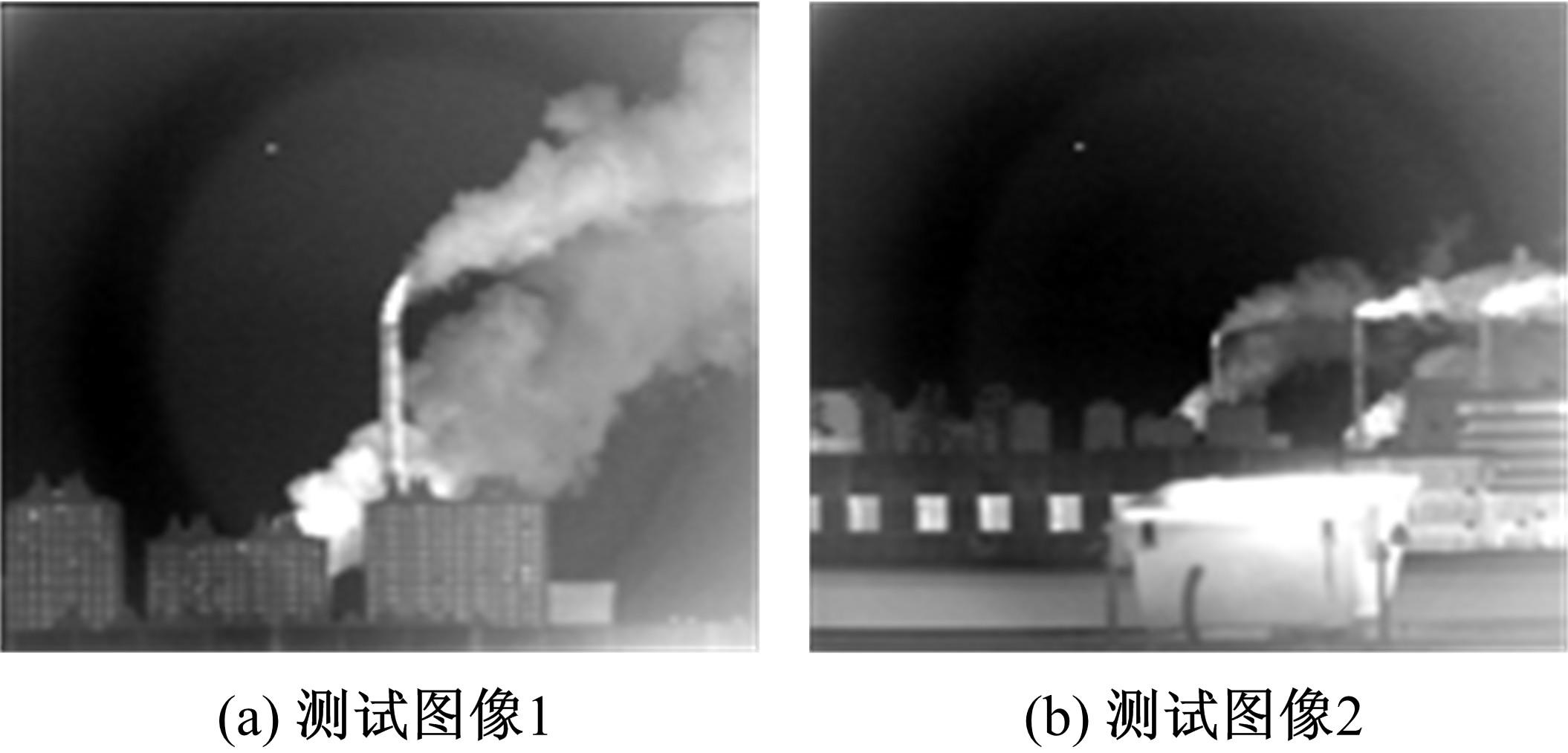 | 图6 超分辨图像重建测试样本Fig.6 Test samples of SRIR |
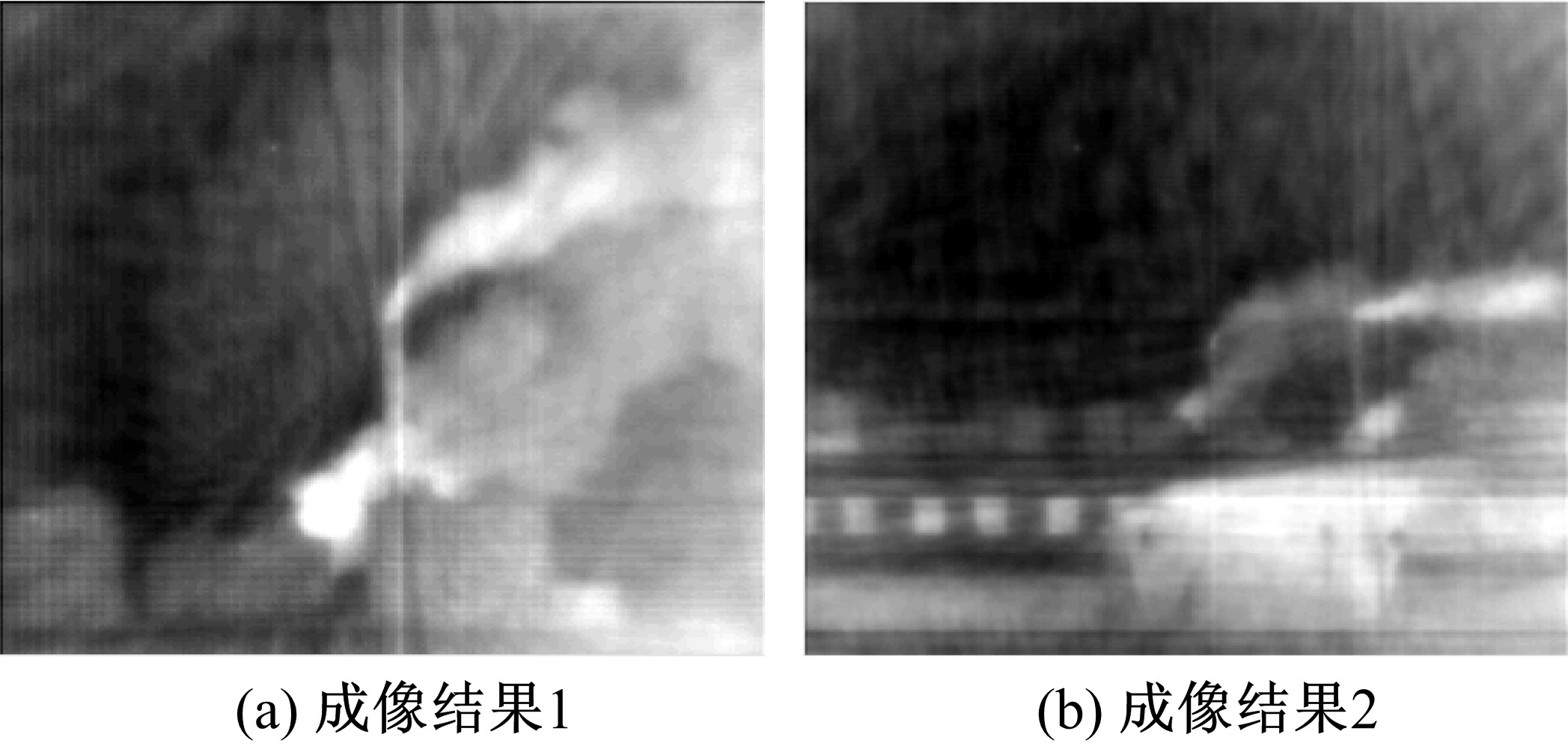 | 图7 编码孔径成像结果Fig.7 Result of coded aperture imaging |
(2)信号稀疏表示
信号稀疏表示目的是为了提高信号的非线性函数的逼近能力, 利用光学系统成像的分片光滑性, 实现了信号在傅里叶变换域的稀疏表示并生成观测矩阵, 编码孔径成像稀疏表示结果如图8所示。
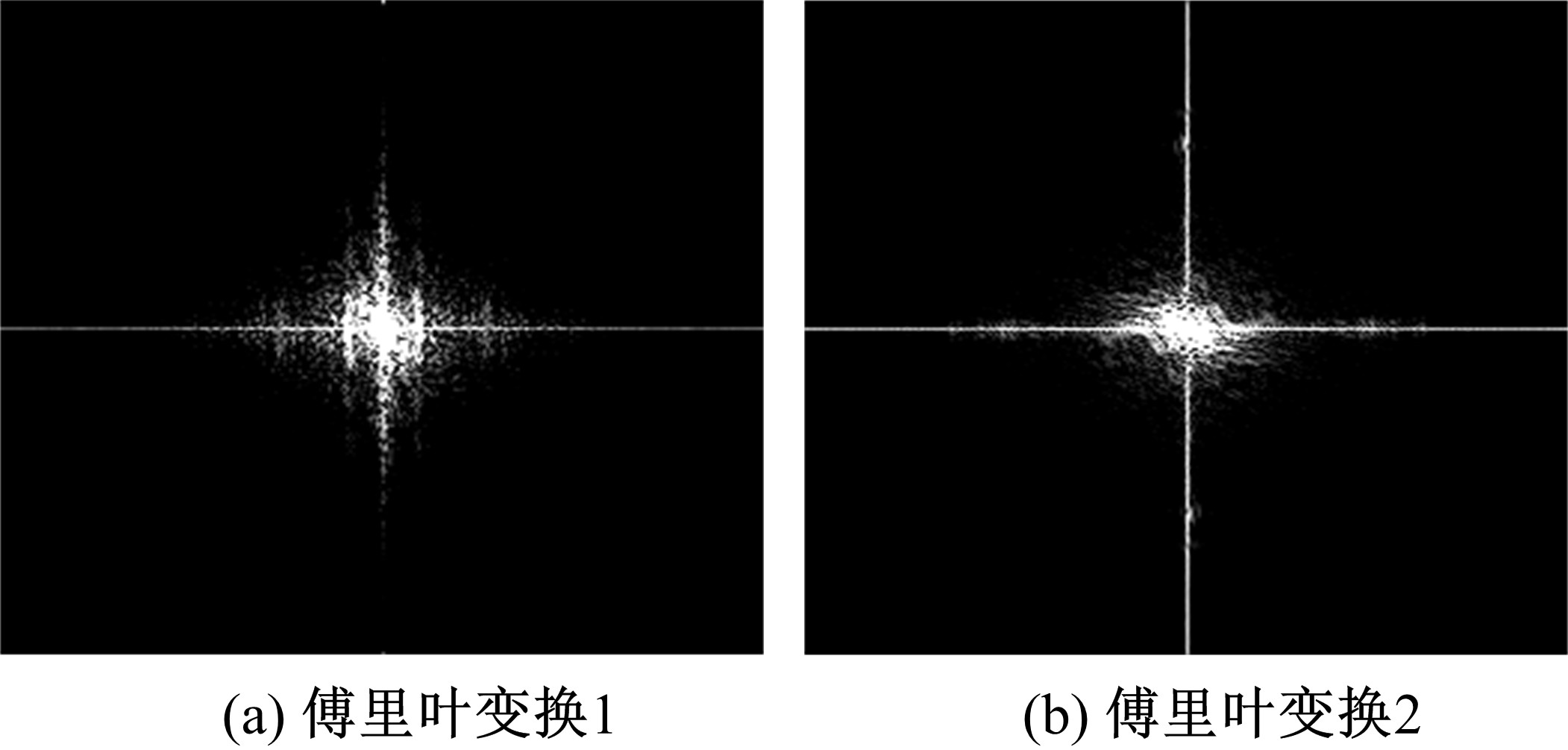 | 图8 编码孔径成像傅里叶变换Fig.8 Fourier transform of coded aperture imaging |
(3)图像的超分辨重建
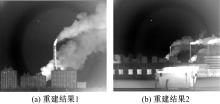
首先, 采用IGPSR-BB算法对稀疏的图像信号进行超分辨重建。其中, 初始化参数
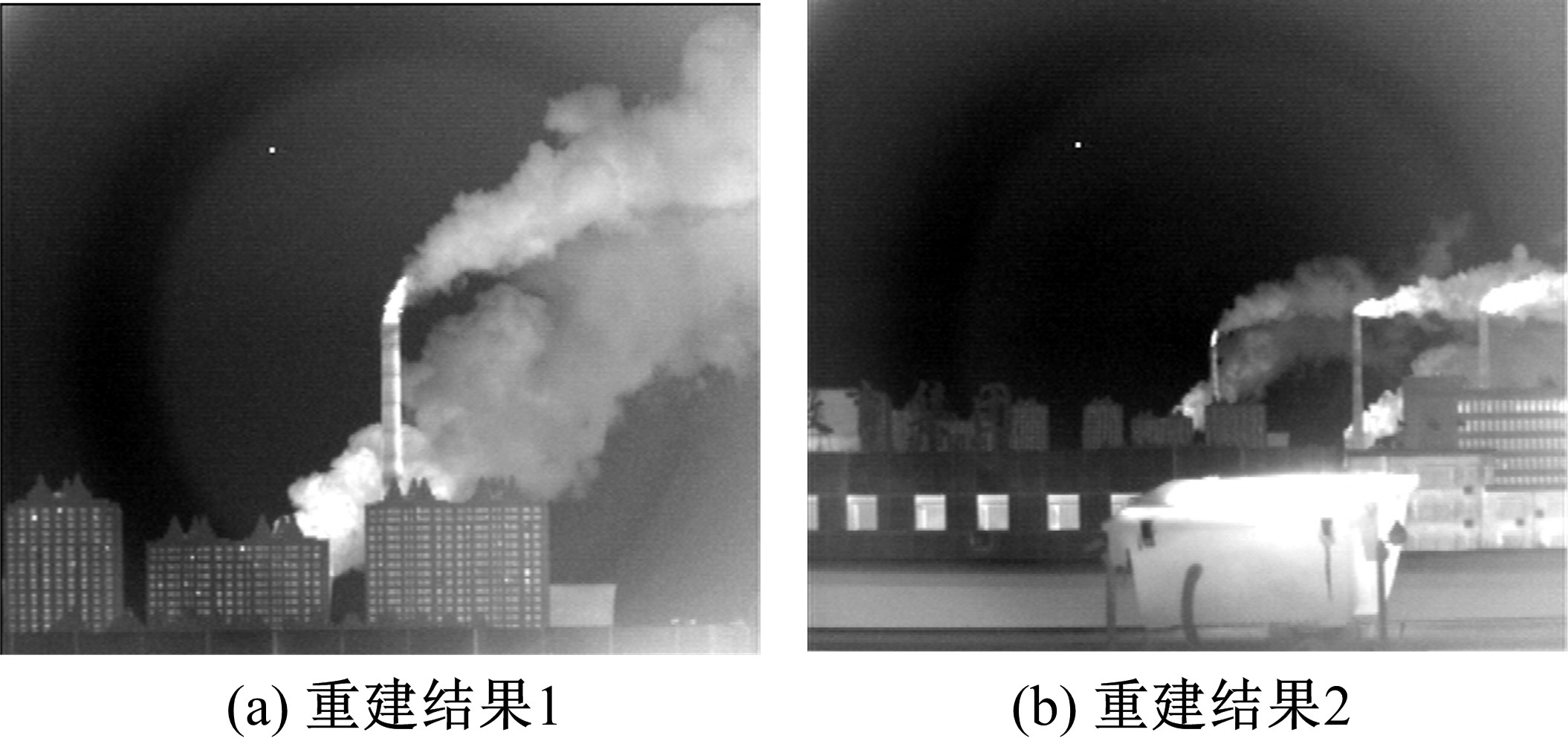 | 图9 超分辨图像重建结果Fig.9 Results of SRIP |
| 表1 图像信号重建数据对比 Table 1 Data comparison of SRIR |
通过表1数据对比结果可知, IGPSR-BB算法在迭代次数方面明显优于GPSR和GPSR-BB算法, 从而极大地提高了计算效率, 节省了图像重建的时间。而且PSNR和SSIM值优于传统方法, 可以满足工程应用技术指标的要求。
通过频谱面孔径编码器对采样信号进行编码压缩, 再利用傅里叶变换实现信号的稀疏表示, 提出一种改进的梯度投影稀疏重构并行加速算法完成对欠采样信号的超分辨重建。实验结果表明:本文算法能够提高图像的峰值信噪比和结构相似度, 同时达到去噪的目的, 并表现出较好的实时性, 具有一定的工程应用价值。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|