



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
改进的离散混合蛙跳算法压缩感知信号重构及应用
[刘洲洲1, 2  , 王福豹
, 王福豹2 ]
, 王福豹|
|


作者简介:刘洲洲(1981-),男,博士研究生.研究方向:无线传感器网络.E-mail:nazi2005@126.com
针对工程离散优化问题特点,定义了具有普遍意义的青蛙编码方式,设计了编码位调换更新机制,提出了自适应权重因子和双模子族群策略。在此基础上,将改进的离散混合蛙跳算法(Discrete shuffled frog leaping algorithm,DSFLA)应用于压缩感知重构算法中,将未知重构信号理解为青蛙编码方式,利用DSFLA算法全局寻优能力得到次最优信号重构信息,从而实现了稀疏度未知情况下的信号重构。最后对典型TSP(Travelling salesman problem)问题算例和WSNs多目标定位问题进行仿真,仿真结果表明:改进的DSFLA具有更强的复杂问题求解能力,基于改进DSFLA压缩感知重构算法的WSNs目标定位精度优于传统信号重构算法,且抗噪能力达到25~45 dB。
An improvement of Discrete Shuffled Frog-leaping Algorithm (DSFLA) is proposed. Fist, according to the characteristics of discrete optimization problems, the frog coding of universal significance is defined, which is important for DSFLA in solving discrete optimization effectively. Then, the update mechanism based on “swapping of coded bits” for DSFLA is designed, and an adaptive weighting factor and sub-ethic dual strategy are presented. Finally, the improved DSFLA is applied in compressed sensing reconstruction algorithm, in which the unknown reconstructed signal encoding is taken as the frog code. Typical TSP problems and multiple target localization in WSN are simulated. Simulation results show that the improved DSFLA has prominent ability to solve complex problems, and the perception accuracy of WSNs target reconstruction based on improved DSFLA CS reconstruction algorithm is better than that of the traditional signal reconstruction algorithm, and the anti noise capacity reaches 25~45 dB.
由于工程实际问题通常具有大规模、非线性、建模困难等特点, 传统的优化算法在求解精度、求解效率等方面已不能有效解决, 因此寻求适用于大规模并行计算的智能优化方法成为当前研究热点之一[1]。2003年, 学者Eusuff和Lansey[2]通过模拟青蛙群体觅食行为, 提出了一种新的启发式智能计算技术— — 混合蛙跳算法(Shuffled frog leaping algorithm, SFLA), 算法按照子种群划分思想更新青蛙模因信息, 实现了局部搜索与全局信息交换有机结合, 具有较强的鲁棒性[3]。目前, 关于混合蛙跳算法的研究主要集中于算法改进和在连续优化问题中的应用等方面[4, 5], 关于离散混合蛙跳算法的研究则相对较少, 且缺乏相对系统的理论研究, 因此, 开展离散混合蛙跳算法研究具有重要意义。
压缩感知(Compressed sensing, CS)[6]是一种新型的数据压缩和重构理论, 具有编码简单、抗误码性好、能够实现高效的压缩等特点[7], 为无线传感器网络(WSNs)、图像处理、目标跟踪等领域提供了全新的解决问题的思路[8, 9, 10]。信号重构算法是压缩感知理论关键技术之一, 学者们相继提出了正交匹配追踪(OMP)算法、贪婪匹配跟踪(GMP)算法、正则化正交匹配追踪(ROMP)算法等。文献[7]提出了基于自适应方向提升稀疏表示的重构方法, 有效克服了传统信号重构过程中方向选择性差的局限性。文献[9]将正交基字典引入到信号重构中, 得到了最稀疏的信号表示, 但是算法复杂度相对较高。文献[11]分析了稀疏度
本文主要针对离散混合蛙跳算法及其在压缩感知重构算法中的应用进行研究。首先在对离散优化问题特点分析的基础上, 定义具有普遍意义的青蛙编码方式, 给出编码位调换青蛙更新机制, 并提出自适应权重因子和双模子族群策略。其次设计基于改进DSFLA的压缩感知重构算法(IDSFLA), 将未知重构信号理解为青蛙编码方式, 利用DSFLA算法全局寻优能力得到次最优信号重构信息。最后采用典型TSP算例和WSNs多目标定位问题进行仿真, 验证改进DSFLA算法和基于改进DSFLA压缩感知重构算法的性能。
离散优化问题是指决策变量
定义1 离散混合蛙跳算法。对于混合蛙跳算法, 如果决策变量
定义2 离散混合蛙跳算法青蛙粒子编码。在DSFLA中, 青蛙粒子
观察定义2, 可以发现, 两个不同的青蛙编码能够通过一系列的编码位调换完成相互转换, 例如, 对于编码
定义3 编码位调换。对于青蛙
定义4 编码位调换集。对于青蛙
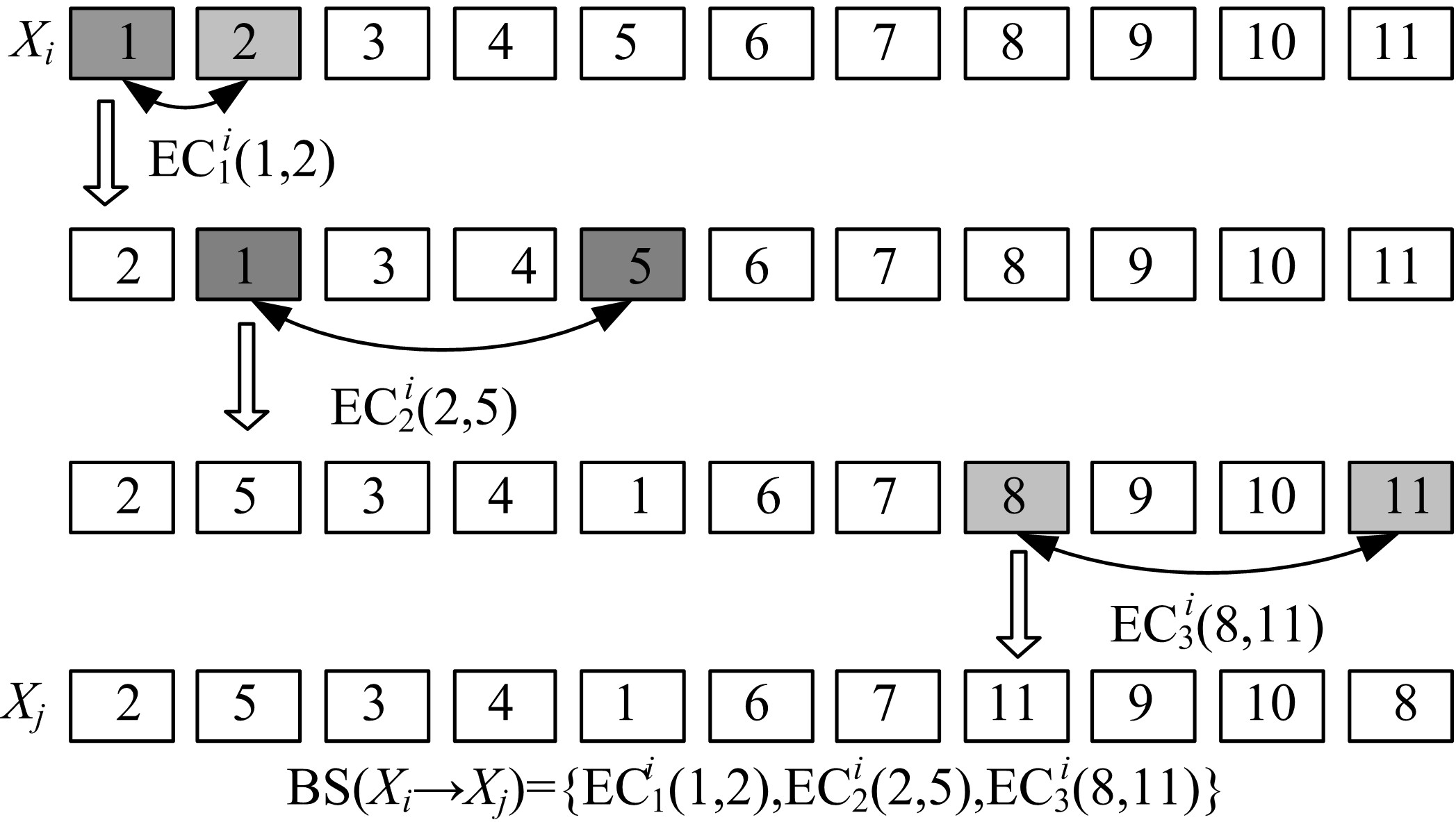 | 图1 编码位调换及编码位调换集示意图Fig.1 Coding bit exchange and coding position exchange diagram |
定义5 青蛙更新机制。DSFLA青蛙更新机制定义为:
式中:
对于标准混合蛙跳算法, 随着迭代次数的不断增加, 算法进化速度明显降低甚至会停滞, 陷入早熟。相关研究表明[15]增加青蛙群体多样性和扰动性能够使得算法进一步深度搜索, 提高发现最优解概率, 本文在此基础上提出了自适应权重因子和双模子族群策略。
(1)自适应权重因子。在式(1)的基础上, 改进的离散混合蛙跳算法(IDSFLA)采用的自适应权重因子为:
式中:
(2)双模子族群策略。双模子族群策略将青蛙子族群划分为改良群和优良群, 在改良群和优良群内, 青蛙分别执行不同的更新策略。
定义6 种群进化控制因子
式中:
定义7 改良群规模
式中:
从式(3)(4)可以看出, 算法迭代初期,
式中:
如果式(5)产生的新个体适应度值优于原个体, 则替代原个体, 否则随机生成新的个体进行替代。
根据式(4), 子族群
优良群青蛙个体更新策略为:
式中:
如果式(8)产生的新个体适应度值好于原个体, 则替代原个体, 否则随机生成新的个体进行替代。图2为优良群青蛙个体更新策略示意图。
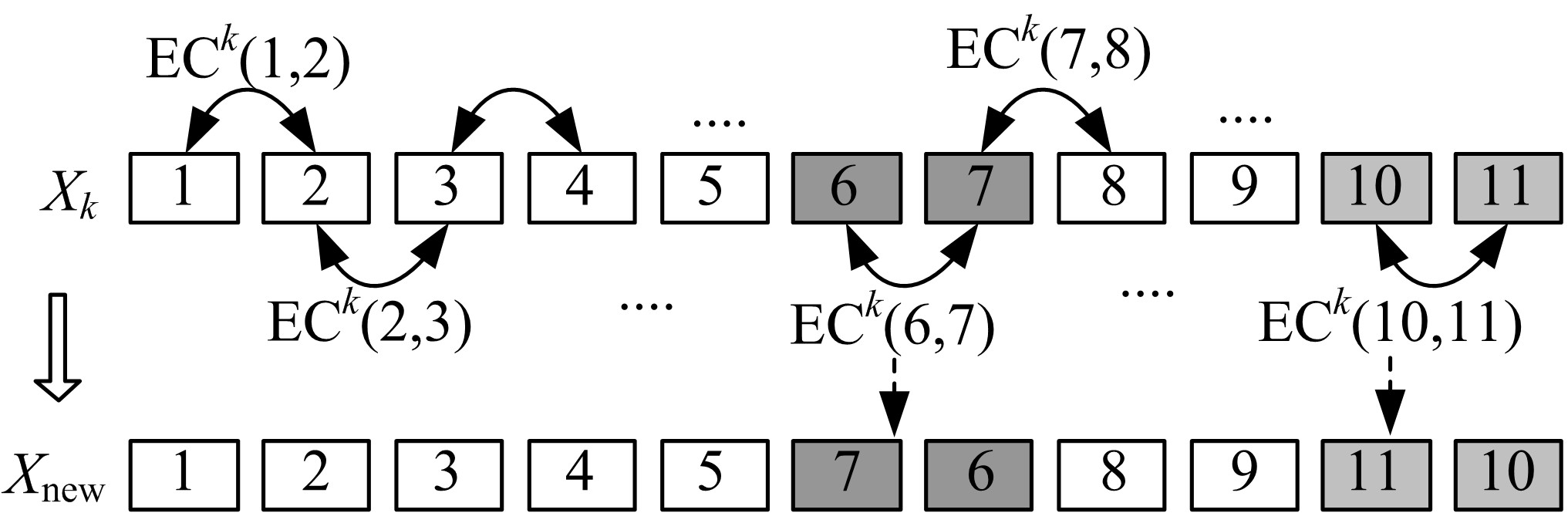 | 图2 优良群青蛙个体更新策略Fig.2 Individual renewal strategy of fine group of frogs |
CS原理可以描述为[16]:
(1)假设有限长度为
式中:
(2)对
式中:
(3)信号
通过求解式(11)得到
CS稀疏重构是指已知
定义8 IDSFLA目标函数。IDSFLA的目标函数定义为:
基于IDSFLA的CS稀疏重构算法实现过程可以描述为:
∥初始化
(1)算法参数设置。设置青蛙种群规模为Nf, 子族群数为Qf, 全局最大进化代数为Tmax, rmax, rmin, ξ 1, ξ 2以及其他参数。设定终止条件
(2)初始化。对青蛙种群进行初始化, 计算青蛙个体适应度值f
While (t≤ Tmax) do
{
∥子族群划分
(3)按照适应度值对青蛙进行降序排列, 并对种群进行子族群划分。
(4)更新全局最优解Pg(t)及子族群最优解
While (k≤ Kmax) do
{
∥局部搜索
For i=1:Qf
(5)根据式(4)(7)对子族群Ei进行改良群和优良群划分。
(6)改良群内个体根据式(5)更新, 优良群内个体根据式(8)进行更新。
(7)更新子族群Ei内的
(8)End
(9)k← k+1
}
∥全局信息交换
(10)将所有青蛙个体混合, 重新形成新的种群。
(11)更新全局最优解Pg(t)。
(12)终止条件判断, 如果
}
(13)程序结束, 输出结果。
问题描述。在被划分为
式中:
从式(14)可以构造
定理 当传感器节点
证明 由于
式中:
式中:
式中:
对于稀疏向量
令
由Chernoff不等式得:
对于矩阵
因此, 任取稀疏向量
定义
这样证明了
IDSFLA参数设置如下:
式中:Opt为已知全局最优环路长度(bayg29、eil51和ch150理论最优路线长度分别为9074.1, 428.87和6528), 表1给出了具体实验结果数据。图3为ch150问题下4种算法给出的最优行进路线。
| 表1 TSPLIB不同算法测试结果 Table 1 Test results for different TSPLIB algorithm |
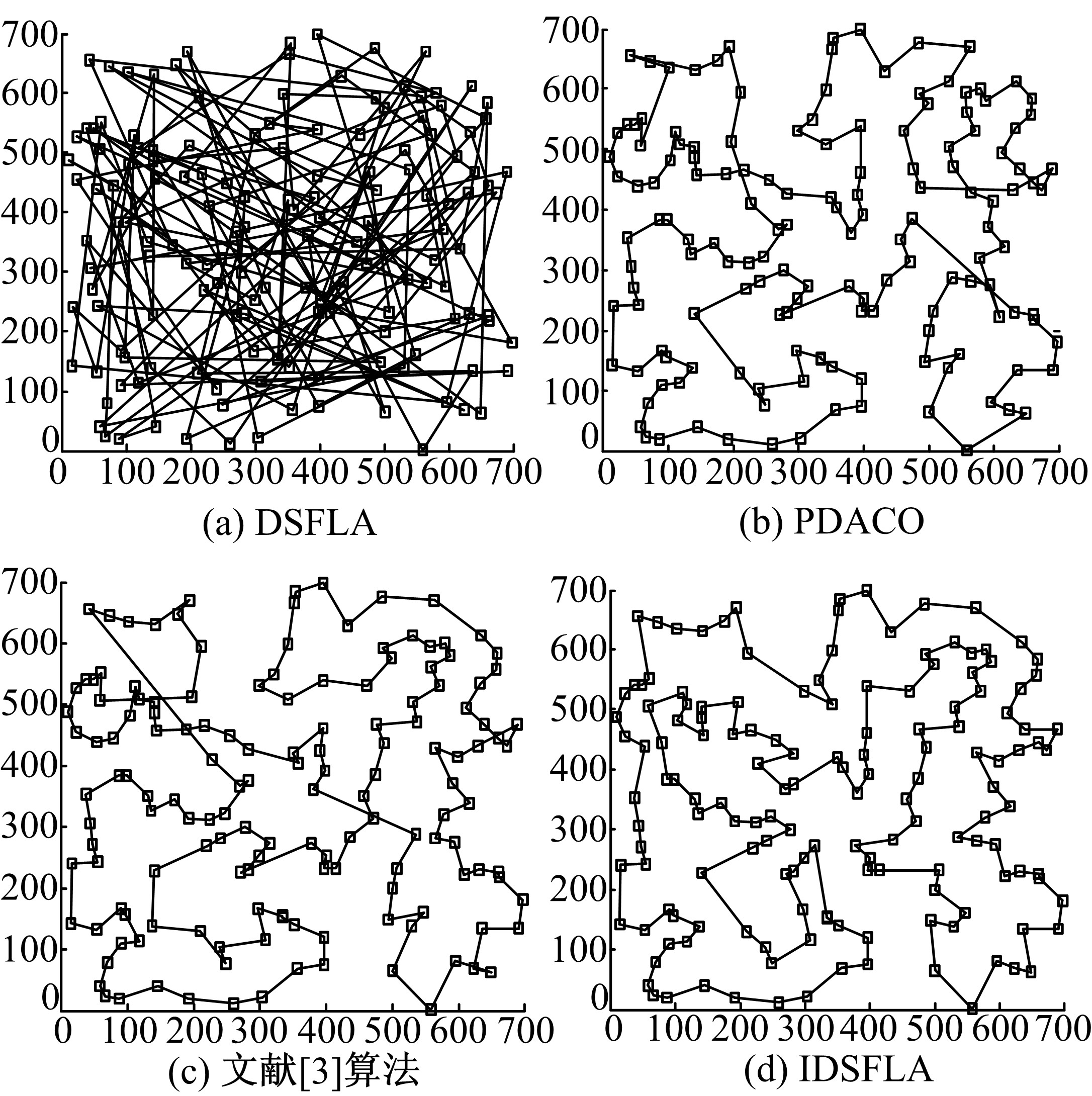 | 图3 ch150问题最优行进路线Fig.3 Optimal routes of ch150 problem |
在算法求解精度方面, PDACO、文献[3]算法和IDSFLA都能够给出较好的行进路线, 且IDSFLA的求解精度明显优于其他两种算法, 而DSFLA无法得到最优解。在算法运行速度方面, 对于bayg29、eil51和ch150测试问题, IDSFLA运算速度都要快于其他3种算法。
30 m× 30 m监控区域被划分为900个网格, 设共有35个未知目标, 即重构信号稀疏度为35, 部署120个传感器, SNR=20 dB(噪声级别), 利用衰减模型生成测量矩阵。分别采用GMP、ROMP和基于IDSFLA的CS稀疏重构算法(记为IDSFLAMP)进行目标定位, 分别运行30次, 取算法平均消耗时间
从测试结果可看出, IDSFLA目标定位精度优于其他两种算法, 且具有较低的定位失效率, 而GMP定位精度最差, 定位失误率达到了27%, 在算法运算时间方面, 由于IDSFLAMP采取多次循环迭代机制, 算法运算时间相对较长。
| 表2 目标定位测试结果 Table 2 Target location test results |
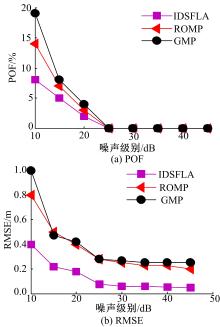
为了进一步分析IDSFLAMP算法性能, 分别设置不同稀疏度、噪声级别等参数进行实验仿真。图4给出了不同稀疏度下算法定位性能对比。由图4可以看出, 图5给出了不同噪声级别下的GMP、ROMP和IDSFLAMP算法定位性能对比。
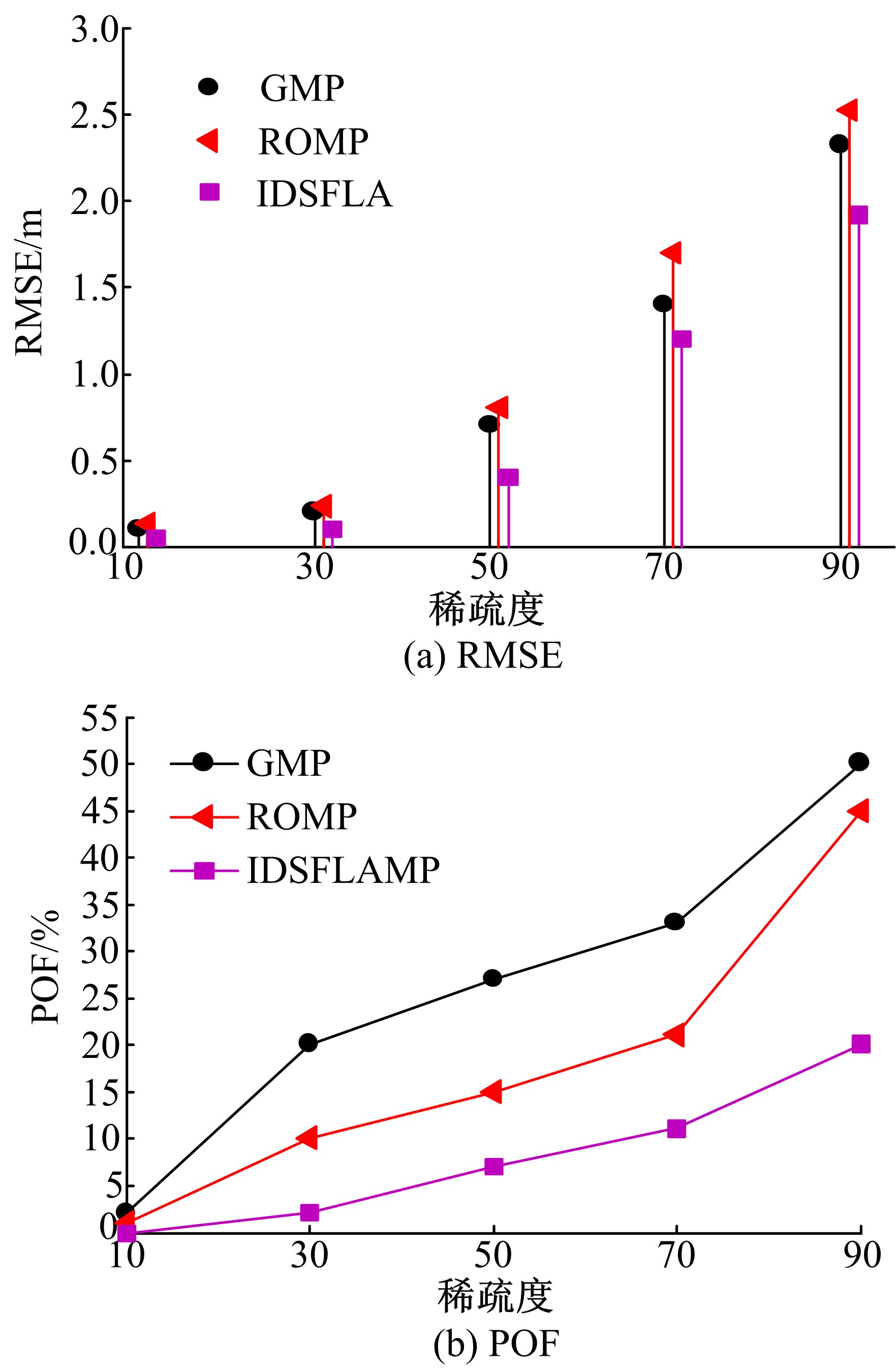 | 图4 不同稀疏度下算法定位性能Fig.4 Algorithm positioning performance under different sparse degrees |
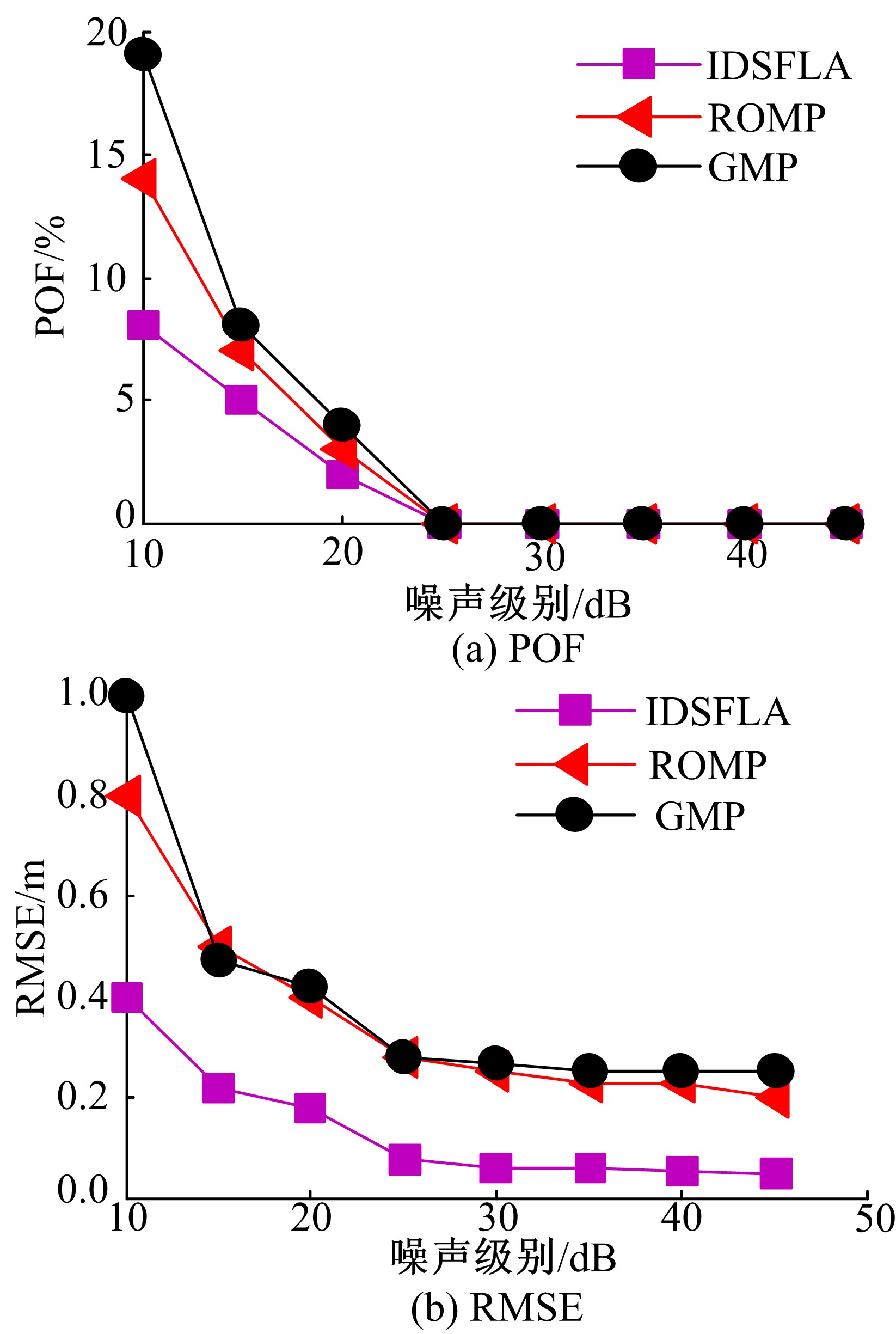 | 图5 不同噪声级别下算法定位性能Fig.5 Algorithm positioning performance under different noise levels |
当稀疏度在30以下时, GMP、ROMP和IDSFLAMP算法都能准确完成目标定位, 且定位精度相对较高, 随着稀疏度不断增加, 3种算法定位性能明显下降, 特别地当稀疏度低于50时, IDSFLAMP算法仍可以以较高准确率实现目标定位。
由图5可以看出, 当噪声为25~45 dB时, 3种算法都能够完成目标定位, 表明3种算法具有一定的抗噪能力, 而且对于不同噪声级别, IDSFLAMP算法定位性能优于其他两种算法。
研究了改进的离散混合蛙跳算法及在压缩感知重构算法中的应用。仿真结果表明, 改进的离散混合蛙跳算法具有优异的复杂问题求解能力, 基于改进DSFLA压缩感知重构算法的WSNs目标定位精度优于传统GMP、ROMP重构算法, 且在噪声级别25 dB下能够准确、稳定地实现目标定位。下一步需要重点研究离散智能算法基本理论及压缩感知重构算法的稳定性和鲁棒性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|