崎岖地形环境下四足机器人的静步态规划方法
 , 荣学文, 李贻斌
, 荣学文, 李贻斌Static gait planning method for quadruped robots on rough terrains
ZHANG Shuai-shuai1 , RONG Xue-wen1 , LI Yi-bin1 , LI Bin2
, RONG Xue-wen, LI Yi-bin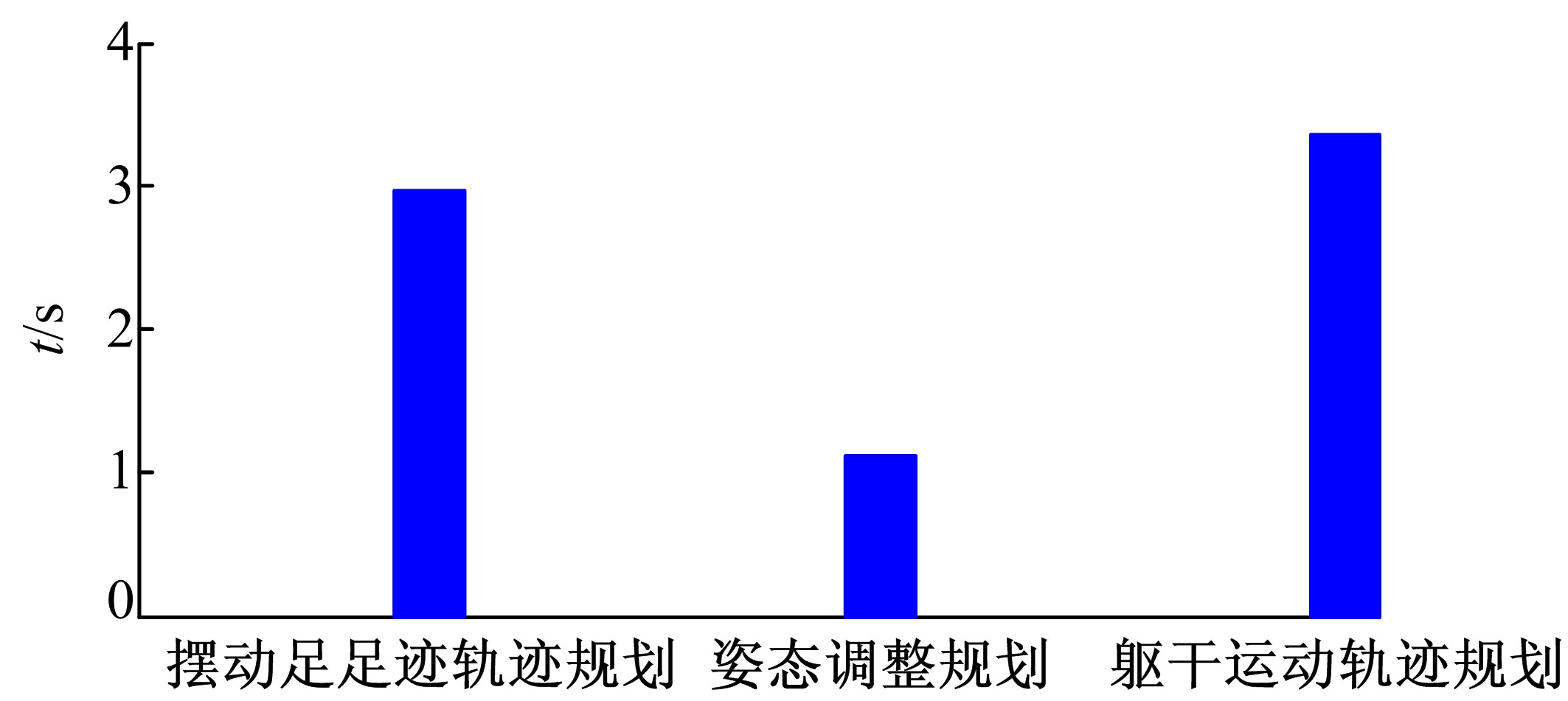
崎岖地形环境下四足机器人的静步态规划方法 |
|
张帅帅, 荣学文, 李贻斌 |
Static gait planning method for quadruped robots on rough terrains |
|
ZHANG Shuai-shuai
, RONG Xue-wen, LI Yi-bin |
| 静步态规划算法在Matlab中运行 一万次所用时间 |
| |