



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
面向区域的认知无线电系统的频谱感知模型
[栾磊1, 2  , 赵晓晖
, 赵晓晖2 , 徐勇军2 ]
, 赵晓晖, 徐勇军|
|


作者简介:栾磊(1983-),男,讲师,博士研究生.研究方向:认知无线电.E-mail:luanleiv126@163.com
建立了面向区域的频谱感知模型(RSSM),根据路径损耗和衰落裕度理论推导出了RSSM感知区域的大小。基于RSSM,在单用户频谱感知中分析了阈值设定方法以及次用户位置对频谱感知性能的影响;在协作频谱感知中,利用D-S理论分析了硬决策协作频谱感知中次用户分散性对感知性能的影响。最后通过仿真实验证明了本文模型的正确性。
A Region-oriented Spectrum Sensing Model (RSSM) was proposed. First, the size of the sensing area of RSSM was deduced using path loss and fading margin theory. Then, in single-user spectrum sensing framework, the method of threshold setting and the impact of secondary user's location on the performance of spectrum sensing were analyzed. Furthermore, in hard decision-making cooperative spectrum sensing, the effect of the secondary user's dispersion on the performance of spectrum sensing was studied. Simulation results not only demonstrate the effectiveness and rationality of the proposed model, but also confirm the correctness of location information on the analysis of spectrum sensing performance.
频谱感知是认知无线电技术的基础[1, 2, 3], 具有快速准确的频谱感知能力是对高性能认知无线电设备的基本要求。目前, 频谱感知方法从是否协作角度上看可分为两类:单用户本地频谱感知和协作频谱感知。电磁环境中的多径效应、阴影衰落和噪声不确定性严重影响了系统的频谱感知性能[4], 因此单用户频谱感知有时很难满足认知无线电系统要求。由于协作频谱感知能够大大提高频谱感知性能, 因此受到普遍关注[5]。
目前, 多数学者在研究基于能量检测的频谱感知时, 都假定已知接收信号信噪比(SNR), 所得到的频谱感知性能是针对一个固定SNR来说的, 这就是面向信噪比的频谱感知模型。次用户接收信号的信噪比主要由主用户发射功率、次用户与主用户之间的距离以及信道状态决定, 如果已知主用户发射功率并且只考虑信道中的路径损耗, 将信噪比固定相当于假设所要感知的主用户全都位于以次用户为圆心的某圆内。然而在实际应用中, 主用户与次用户之间的距离是随机变化的, 将主用户的位置严格限定在一个圆内是不尽合理的, 在这一假设下设计出的频谱感知方法有时难以满足实际认知无线电系统要求。因此, 以主用户的位置可随机变化作为研究的前提更具有实际意义。另外, 由于协作频谱感知通过空间分集来提高频谱感知性能, 所以参与协作的次用户和主用户的位置必将对协作频谱感知性能产生影响, 因此, 位置信息的应用得到很多学者的关注。文献[6]在假设主用户位置信息的前提下, 推导出最佳的能量检测阈值, 然而通常情况下很难获得主用户的位置信息, 所以难以推广到实际应用中。文献[7]将随机几何网络模型引入到频谱感知研究中, 充分考虑了主用户网络和次用户网络拓扑结构的随机性, 将感知信息线性融合, 并采用Fisher线性判别法推导出线性系数。文献[8]根据次用户的相对位置信息来研究参与协作次用户的本地检测结果的相关性, 并建立一个低复杂度的次优融合准则。
已知的关于用户位置信息对频谱感知性能影响的研究基本上都是基于面向信噪比的频谱感知模型的, 本文尝试建立一种面向区域的频谱感知模型(Region oriented spectrum sensing model, RSSM), 并通过该模型从一个新的角度分析次用户的位置对频谱感知性能的影响, RSSM中检测目标不再是检测距次用户某一距离处是否存在主用户而是检测在某一区域中是否存在主用户, 此时主用户与次用户之间的距离是随机变化的, 所建模型实际上就是在以往研究的基础上, 补充了主用户与次用户的相对位置因素对频谱感知性能的影响, 使频谱感知模型更完备, 更符合实际应用场景。
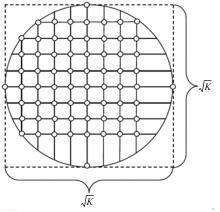
RSSM包含三个要素:一是需要被感知的主用户; 二是发起通信的次用户; 三是次用户的感知区域。RSSM就是指发起通信的次用户对感知区域进行检测, 判定其中是否存在主用户。合理划分感知区域既保证了次用户与主用户的正常通信, 又达到了充分提高频谱利用率的目的。感知区域太大将导致次用户感知灵敏度过高, 频谱利用率过低; 感知区域太小, 主用户与次用户之间容易相互干扰。次用户通常位于感知区域的中心, 限定感知区域相当于限定主用户与次用户之间距离的变化范围。由于距离对路径损耗的影响最为直接, 因此在RSSM中只考虑路径损耗对感知区域划分的影响。感知区域实质上是由次用户和主用户的发射功率等通信参数决定的。如图1所示, 其中有一个主用户
式中:
多数文献都未考虑主用户对次用户的干扰, 而在实际应用中, 不仅要防止次用户干扰主用户, 也要避免主用户干扰次用户。图1描述的是一种特殊情况, 此时
 | 图1 频谱感知区域示意图Fig.1 Spectrum sensing region framwork |
主用户的通信半径
式中:
用
这时主用户发射机和接收机之间的距离是主用户系统的最大通信距离。式(3)中的
同理, 可求出:
式中:
由式(1)(4)(5)(6)和式(7)得出频谱感知半径
文献[10]指出, 在非衰落加性高斯白噪声信道中基于能量检测的单用户频谱感知性能为:
式中:
由于虚警概率
显然, 此时主用户出现在
由式(8)得阈值:
将式(11)(12)带入式(9)得:
假设
瑞利衰落信道中, 接收信号的信噪比是一个随机变量, 其概率密度函数为[10]:
式中:
同时考虑瑞利衰落和路径损耗两个因素的情况下, 检测概率
将式(12)(15)带入式(17)得:
该次用户对检测区域
定义
根据式(20)可将式(19)化简为:
显然
下面探讨次用户位置对
可证明
为了便于分析, 将感知区域离散化, 如图2所示。在感知区域上画网格, 平行横线之间的距离和平行竖线之间的距离相等, 横线和竖线的交点记为
 | 图2 感知区域离散化示意图Fig.2 Discretized sensing area |
设
假设每个次用户的阈值相同, 并使总的虚警概率为0.1。设单个次用户的基本概率分配函数为:
式中:
对于“ OR” 准则协作频谱感知, D-S理论的推理规则可表示为:
式中:证据
式中:
式中:
式中:
式中:
因为
由式(29)和式(32)可得
因为
其含义是
由式(34)(35)和
由式(27)(36)可得:
集合
式(38)描述了感知区域上只有一个主用户时, 第
由式(39)可知, 第二组次用户的感知性能比第一组次用户的感知性能好, 所以基于RSSM的“ OR” 准则协作频谱感知, 次用户越分散, 感知性能越好。
对于“ AND” 准则协作频谱感知, D-S理论的推理规则表示为:
式中:证据
式中:
式中: CER(E'gi)是E'gi 的信任度函数,表示证据E'gi的确定性, 根据证据合取原理可得:
由证据理论可知
设d'gi=max{dui } 是第g组中次用户与点i之间距离的最大值,式中u=1,2,…,n,由于Pd (dui)是dui的单调递减函数,那么CER(E'gi)表示为:
其含义是 i点上有主用户时,证据E'gi的确定性等于离i点最远的次用户感知到该主用户的可信度。对第一组次用户来说,由于n个次用户位于同一点,所以d'1i=dui 。第二组中n个次用户分散在感知区域的不同位置, 并且其中有一个次用户与第一组中次用户的位置相同, 则可得:
由式(44)(46)和
由式(42)(47)可得:
由式(38)(48)可得:
由式(49)可知, 第一组次用户的感知性能比第二组次用户的感知性能好, 所以基于RSSM的“ AND” 准则协作频谱感知, 次用户越集中, 感知性能越好。因为
由式(36)(47)(50)可得:
由式(27)(42)(51)可得;
由式(38)(52)可得:
由式(53)可知, 无论次用户集中还是分散, 基于RSSM的协作频谱感知, 采用“ OR” 准则都比采用“ AND” 准则感知性能好。
首先确定感知区域A。设主用户通信系统中Ppt是120 dB· m,
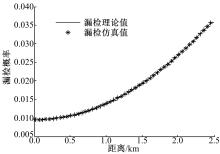
图3描述了单用户频谱感知中, 虚警概率为0.1时, 次用户位置对漏检概率的影响。设次用户的极坐标为 (ρ,θ),由于感知区域是中心对称的,所以令θ=0,只需考虑ρ对感知性能的影响。由图3可知,漏检概率Pm随ρ的增大而增大, 这与第2节的分析相符, 可理解为次用户离感知区域中心越远, 主用户在次用户附近区域出现的概率越小, 次用户检测主用户的难度越大, 发生漏检的概率越大。
 | 图3 基于RSSM次用户位置对单用户频谱感知性能的影响Fig.3 Performance of single user spectrum sensing versus secondary user's location under RSSM |
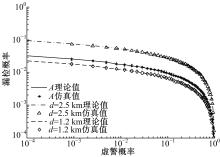
 | 图4 基于RSSM和SNR模型单用户频谱感知的补充ROCFig.4 Performance of ROC based on RSSM and SNR model in single user scenario |
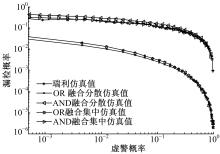
图4是基于RSSM和面向信噪比频谱感知模型在加性高斯白噪声加瑞利衰落信道中的补充ROC。传统的面向信噪比的频谱感知模型中, 主用户与次用户之间的距离固定不变, 例如假设主用户与次用户之间距离为1.2 km, 设定阈值为
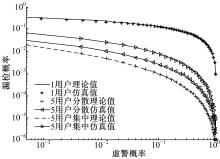
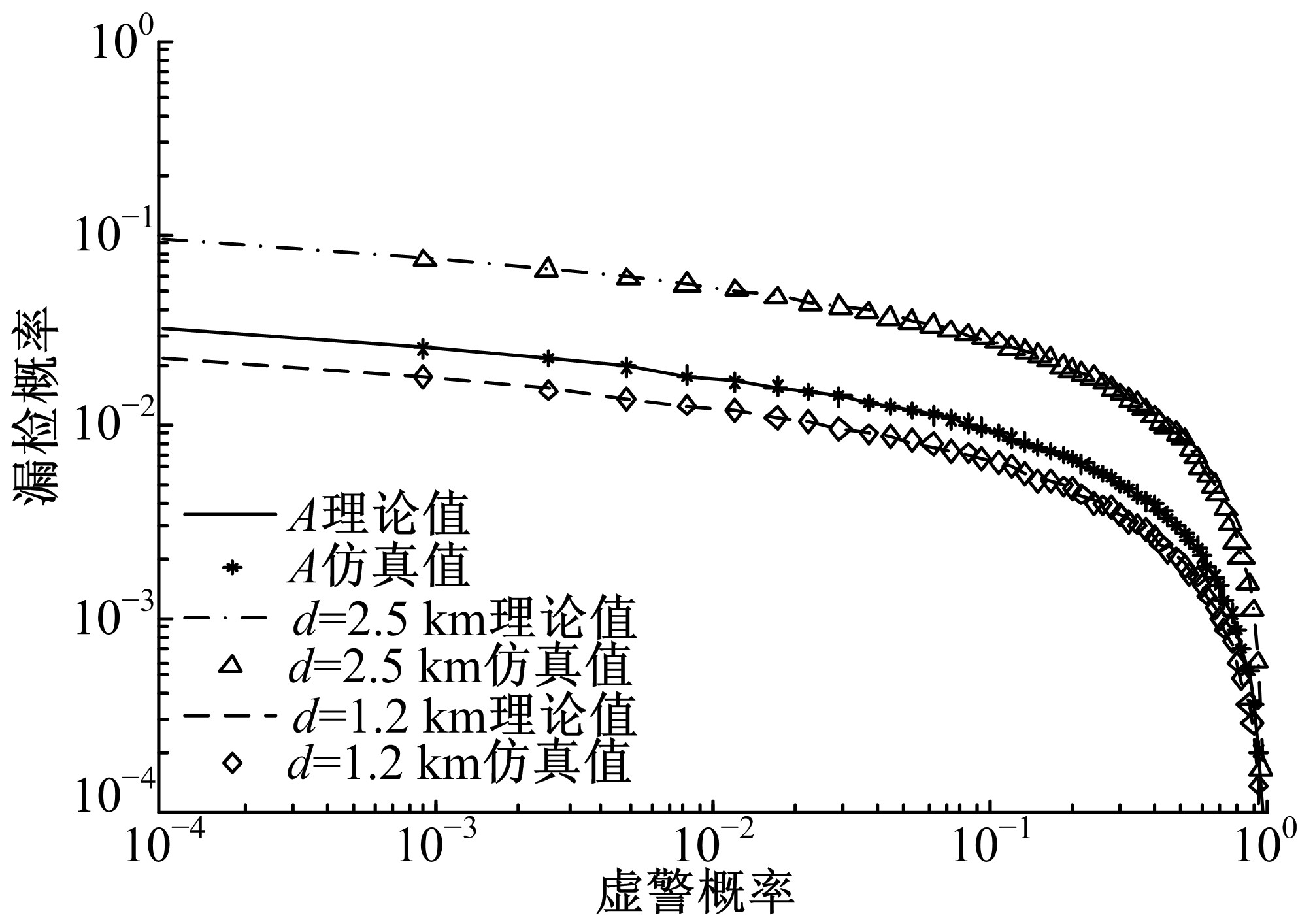
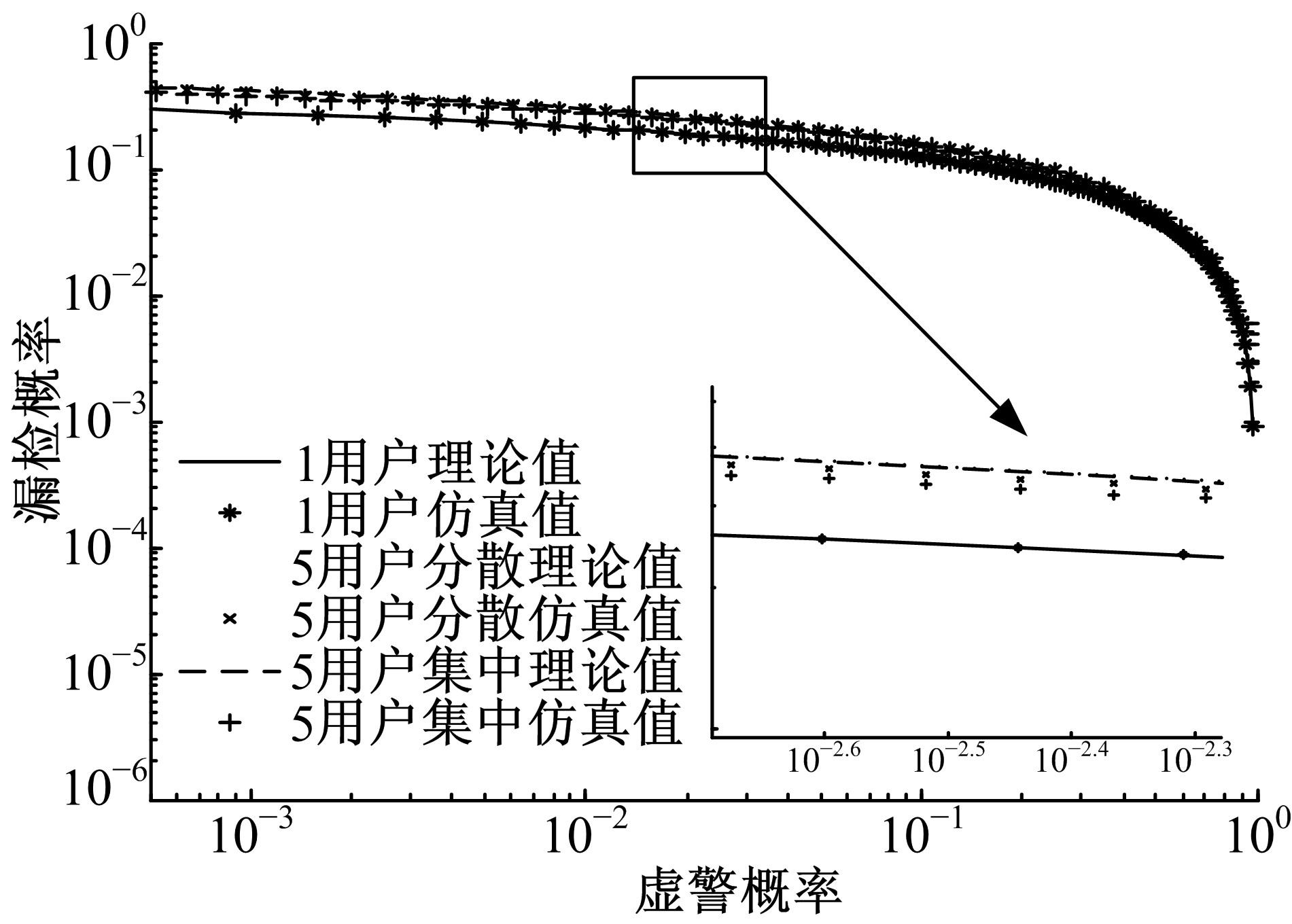
图5中给出了基于RSSM的三组次用户的频谱感知特性, 第一组中只有一个位于感知区域中心的次用户; 第二组中有5个次用户, 它们的极坐标分别为(0, 0)、(1, 0)、(1, π /2)、(1, π )和(1, 3π /2), 代表一组分散的次用户; 第三组中有5个次用户, 它们的极坐标分别为(0, 0)、(1, 0)、(1, 0)、(1, 0)和(1, 0), 代表一组集中的次用户。第一组次用户补充ROC的理论值曲线和仿真值曲线完全重合, 并且与另外两组次用户相比, 对于同一虚警概率, 该组对应的漏检概率最大, 说明“ OR” 准则协作频谱感知性能优于单用户频谱感知性能。图5中的理论值曲线是根据传统的“ OR” 准则理论[11]得到的, 第二组的理论值曲线和第三组的理论值曲线重合, 说明传统的“ OR” 准则理论无法反映次用户的分散性对频谱感知性能的影响。第三组的仿真值曲线在第二组仿真值曲线上方, 说明次用户分散时的漏检概率比集中时的漏检概率小, 这与第3节分析的结论相符, 第二组和第三组中仿真值曲线都在理论值曲线上方, 说明传统的“ OR” 准则融合理论不适用于RSSM。
 | 图5 基于RSSM的“ OR” 准则协作频谱感知性能Fig.5 Performance of cooperative spectrum sensing based on RSSM under ‘ OR’ criteria |
为了说明对称性和分散性对频谱感知性能的影响, 假设感知区域中有5个次用户, 它们的极坐标分别为(0,0)、(1,θ)、(1,θ/4、(1,θ/2)和(1,3θ/4),θ∈(0,2π]。由图6可知,Qm是θ的单调递减函数。θ=2π时次用户的分散性和对称性最好, 感知性能也最好。
 | 图6 基于RSSM的“ OR” 准则协作频谱感知恒虚警时极角θ 对Qm的影响Fig.6 Performance of polar angle under cooperative spectrum sensing based on RSSM under ‘ OR’ criteria |
 | 图7 基于RSSM“ AND” 准则协作频谱感知性能Fig.7 Performance of cooperative spectrum sensing based on RSSM under ‘ AND’ criteria |
图7是三组次用户的"AND"准则协作频谱感知性能曲线。假设感知区域中有三组次用户, 第一组中只有一个位于(0, 0)的次用户, 该组代表单个次用户; 第二组中有5个次用户, 它们的极坐标为(0, 0)、(1, 0)、(1, π /2)、(1, π )和(1, 3π /2), 该组代表位置分散的次用户; 第三组中有5个次用户, 它们的极坐标为(0, 0)、(1, 0)、(1, 0)、(1, 0)和(1, 0), 该组代表位置集中的次用户。由图7可知, 单用户感知时, 理论值曲线与仿真值曲线重合, 并且在另外两组次用户仿真值曲线下方, 说明单用户频谱感知的性能优于“ AND” 准则协作频谱感知的性能。第二组和第三组次用户的理论值曲线重合, 并且位于这两组次用户仿真值曲线的上方, 说明传统“ AND” 融合理论无法反映次用户分散性对频谱感知性能的影响, 并且不适用于RSSM。第二组次用户的仿真值曲线在第三组次用户仿真值曲线的上方, 说明此时, 次用户越集中感知性能越好。
 | 图8 次用户极径固定极角对漏检概率的影响Fig.8 Performance of undetected probability versus polar radius fixed polar angel of SUs |
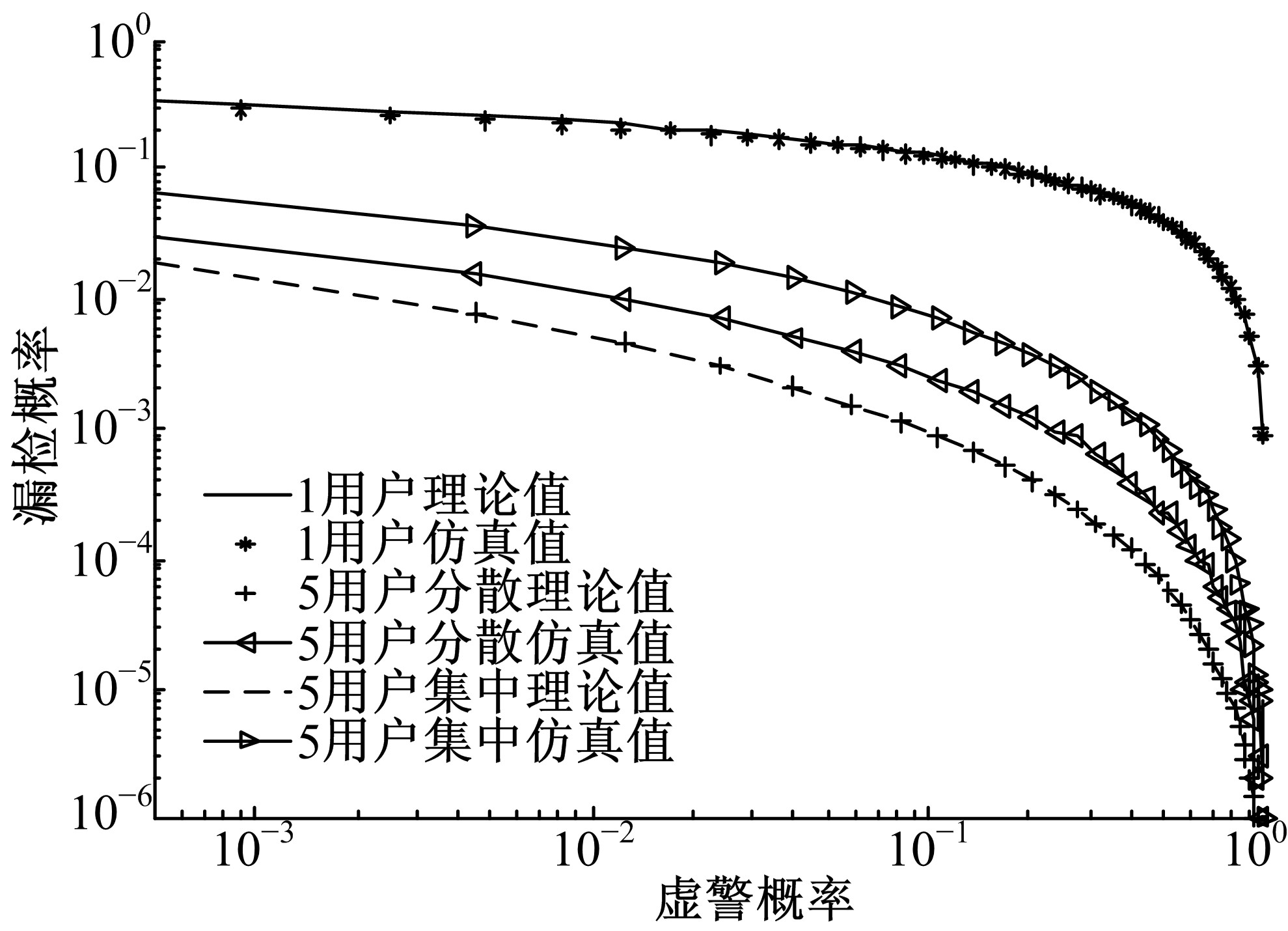
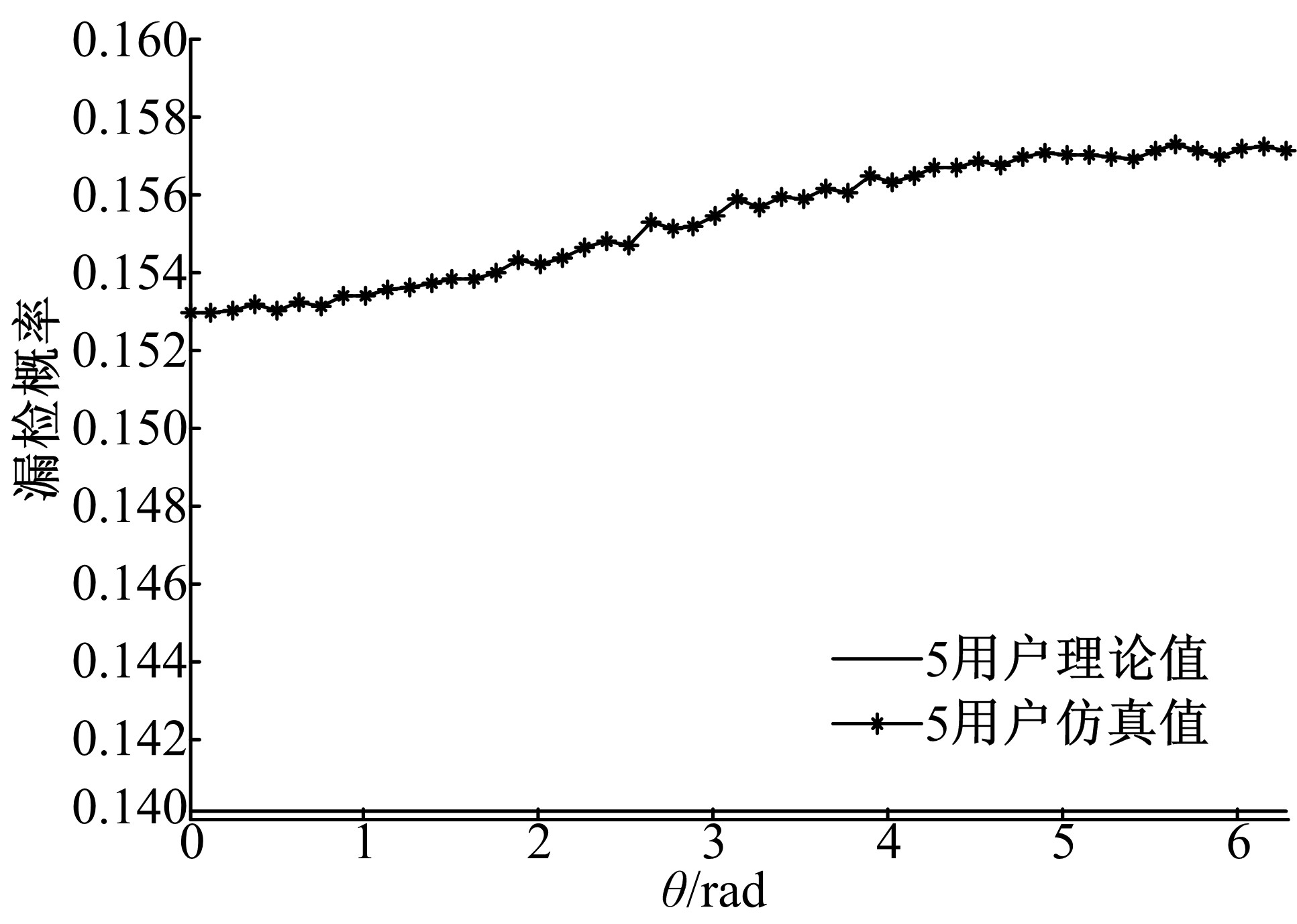
图8进一步证实了基于RSSM的“ AND” 准则协作频谱感知中次用户的分散性对频谱感知性能的影响。感知区域中有5个次用户, 它们的极坐标分别为(0,0)、(1,θ)、(1,θ/4)、(1,θ/2)和(1,3θ/4),θ∈(0,2π]。由图8可知,Qm是θ的单调递增函数。θ=2π时次用户分散性最大, 漏检概率最大。理论值为常量并且始终比仿真值小, 说明传统“ AND” 融合理论无法反映次用户分散性对频谱感知性能的影响。
因为传统的“ OR” 准则和“ AND” 准则协作频谱感知理论不适用于RSSM, 所以图9中只给出这两种融合准则的仿真结果。设感知区域中有三组次用户, 第一组只有一个次用户, 坐标为(0, 0), 代表单用户感知; 第二组中有5个次用户, 它们的极坐标分别为(0, 0)、(1, 0)、(1, π /2)、(1, π )和(1, 3π /2), 代表分散的次用户; 第三组中有5个次用户, 它们极坐标分别为(0, 0)、(0.1, 0)、(0.1, 0)、(0.1, 0)和(0.1, 0), 代表集中的次用户。由图9可知, 无论次用户集中还是分散, “ OR” 准则的漏检概率都比“ AND” 准则的漏检概率小, 而且次用户分散分布并采用“ OR” 准则融合时漏检概率最小, 即感知性能最好。
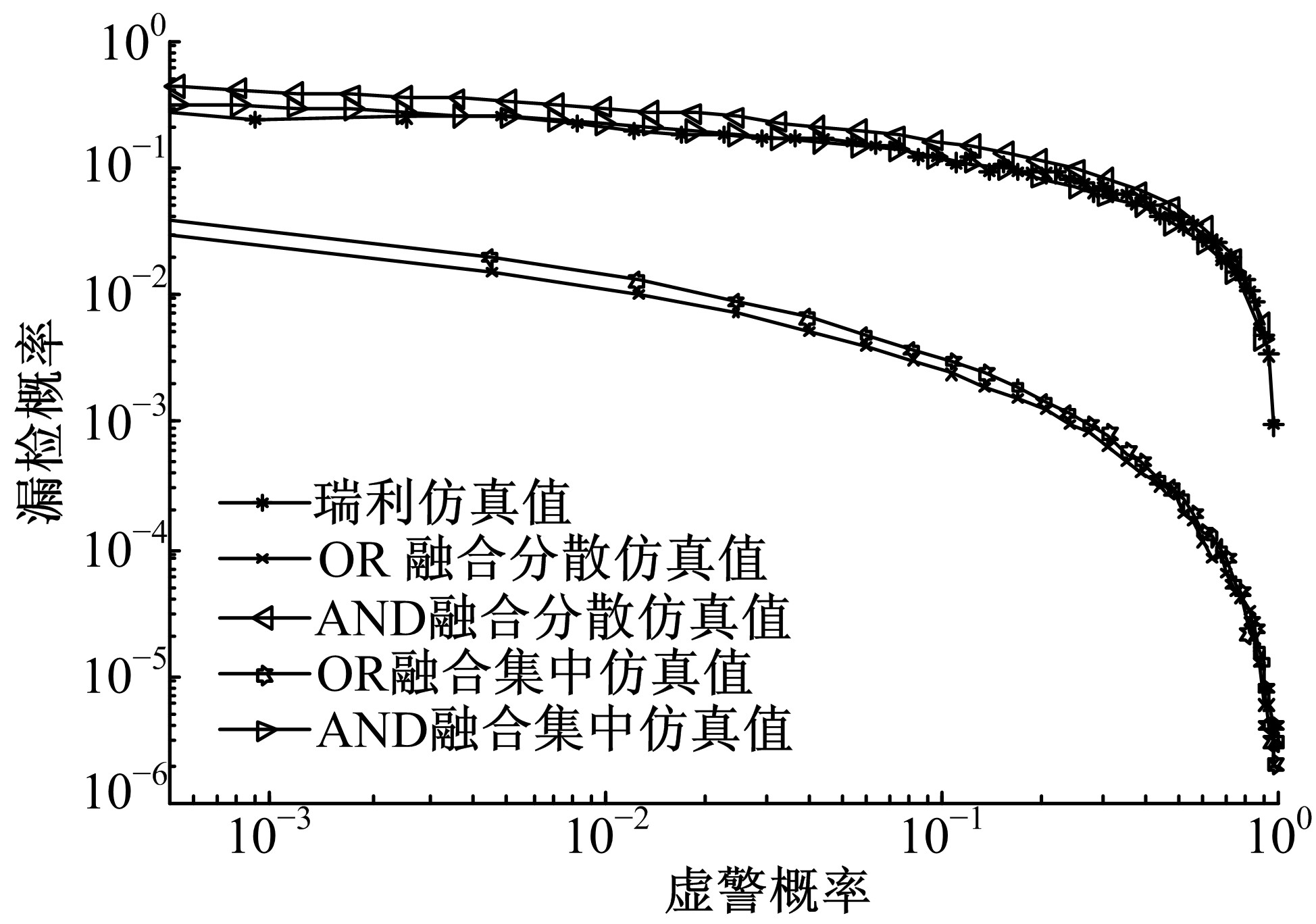 | 图9 “ AND” 准则和“ OR” 准则补充ROCFig.9 Performance of ROC under ‘ AND’ and ‘ OR’ criterion |
本文建立的RSSM与传统面向信噪比的频谱感知模型相比, 实用性更强。在阈值设定方面, 基于RSSM的阈值设定方法更加合理, 有效提高了认知无线电系统的感知性能。另外, 分析发现基于RSSM的频谱感知中, 主用户和次用户的位置信息按一定规律影响感知性能:在单用户频谱感知中, 次用户在感知区域中心时频谱感知性能最好; 在“ OR” 准则协作频谱感知中, 次用户越分散感知性能越好, 而“ AND” 准则协作频谱感知中, 次用户越集中感知性能越好, 并且无论次用户如何分布, “ OR” 准则频谱感知的感知性能都优于“ AND” 准则频谱感知的感知性能, 这些结论无疑对次用户的选择有一定的指导意义。
附录
对E[γ']是ρ的递减函数的证明
设次用户极坐标为(ρ,0),主用户的极坐标为(ρp,θρp),由余弦定理得:
将式(54)(55)带入式(16)得:
当
在不改变单调性和定义域情况下, 用l[k(ρp,θp,ρ)]近似式(56)中的lg[k(ρp,θp,ρ)],式(56)化简为:
可见 γ'是以ρ为参变量、ρp和θp为自变量的线性函数, 同时它也是二维随机变量, 根据线性函数期望的性质可得:
其中,
求
由式(62)可得 k(ρ)是ρ的递增函数,而E(γ')是k(ρ)的递减函数,根据复合函数单调性定理可得,E(γ')是ρ的递减函数。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|