{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于改进加权质心和UKF的移动目标定位算法
[许杰1, 2  , 戚大伟
, 戚大伟3 ]
, 戚大伟|
|


作者简介:许杰(1973),男,副教授,博士.研究方向:数字图像处理及农业(林业)信息化.E-mail:byndxj@163.com
为了解决传统算法对于移动目标定位误差较大的问题,提出了一种基于接受信号强度指示(RSSI)的改进加权质心定位算法,并结合一种改进的UKF算法对RSSI进行有效滤波。针对传统质心定位算法只能静态设置权重的缺陷,提出利用定位误差对距离进行修正,有效提高了算法的定位精度。对于标准UKF算法,在采样过程中采用改进最小偏度策略,引入调节因子,保证了预测方差矩阵的半正定性,并且在滤波更新过程中采用衰减记忆滤波方法,有效抑制了滤波发散,提高了滤波精度。仿真实验结果证明了本文算法的正确性和有效性。
Using traditional localization algorithms the location error is high for moving target. To solve this problem, an improved weighted centroid localization algorithm based on Received Signal Strength Intensity (RSSI) is proposed, and an improved Unscented Kalman Filter (UFK) algorithm is combined for RSSI filtering. For the defect that traditional centroid localization algorithm can only statically set the weights, in this improved algorithm, the localization error is used to correct the distance, which can effectively improves the localization accuracy. For the standard UKF algorithm, the minimum skewness strategy is used in the sampling process, and the adjustment factors are introduced to ensure the positive semidefinite of the prediction covariance matrix; simultaneously, the fading memory filtering method is used in filter updating process, which effectively inhibits the filter divergence and improves the filtering accuracy. Simulation results prove the correctness and effectiveness of the proposed algorithm.
许多的工程应用都需要对移动目标进行实时定位, 以便获得目标的动态信息, 从而进行后续处理。通常情况下, 移动目标都是依靠自身的传感器采集信息, 然后通过无线方式与路由节点通信来实现定位。受现场环境等因素的制约, 定位精度常常无法满足要求, 在硬件设备无法提升定位精度的情况下, 只能寻求更为先进的定位算法[1, 2, 3]。
目前的移动目标定位算法主要分为两大类:第一类是不依靠距离的定位算法, 包括质心算法、凸规划算法以及DV-HOP算法等[4, 5]; 第二类是基于距离的定位算法, 主要包括三边测量算法、三角测量算法以及极大似然估计算法等[6, 7]。这两类方法各有优缺点, 因此经常会被结合使用, 在保证定位精度的前提下, 尽量降低硬件成本。
接收信号强度指示(Received signal strength indicator, RSSI)是一种用于计算节点间相对距离的常用参数, 不需要其他硬件, 可直接从移动目标自身携带的传感器获得。基于RSSI的加权质心定位算法在多个领域中都有应用, 并且取得了一定的效果[8]。但是传统加权质心定位算法在分配权重时只是单纯地考虑与距离成反比关系, 存在一定的不合理性。此外, 在实际的测量环境中, RSSI很容易受到外界干扰, 混入一定的噪声, 就会导致数据出现较大的随机性和误差, 因此需要对RSSI进行有效滤波。
基于上述分析, 本文首先提出了一种改进的基于RSSI的加权质心定位算法, 该算法引入反馈机制, 利用定位误差对距离进行修正, 从而实现权重的动态调整; 其次, 利用UKF算法对获得的RSSI进行滤波, 针对传统UKF算法复杂度高的缺点, 通过优化最小偏度单形采样策略减少采样点, 以衰减记忆滤波平方根替代协方差阵实现递推运算, 从而减少计算误差引起的滤波发散, 达到改进UKF算法性能的目的。仿真实验结果表明, 本文算法具有较好的性能以及较高的定位精度。
传统的质心算法原理为:当未知节点在定位区域中移动时, 通过广播方式与锚节点进行通信, 当收集到所有能与之连通的锚节点信息后, 计算出覆盖区域重叠部分的中心, 即估计未知节点的位置。从传统质心定位算法的原理可知, 能够给未知节点提供信息的锚节点越多, 定位越准确, 但是在实际应用中并不会有足够数量的锚节点来保障该算法的精度。此外, 传统质心算法不能保证未知节点从锚节点处接收的信息量相同, 当这些信息的方差较大时, 定位精度同样会受到很大影响。总体来看, 传统质心算法只能用于初步定位。
一种对质心算法的有效改进措施就是引入距离信息, 使未知节点与锚节点之间的位置有可参考的依据。在一个节点网络中, 发送节点广播的信息中会包含发射功率值, 而接收节点通过比较接收到信号的功率与自身的发射功率计算出功率差, 再通过某种信号传播模型计算出节点间的距离, 这就是RSSI的原理。因此可以定义RSSI为:
式中:
式中:
由RSSI的原理可以看出, 其与距离之间存在特定的对应关系, 当其他参数已知时, 就可以利用RSSI计算出距离, 并且RSSI与距离之间呈明显的反比关系。与未知节点越近的锚节点其权重应该越大, 因此引入距离以后, 加权质心算法为:
由于距离信息参与了定位计算, 基于RSSI的加权质心算法的定位精度明显高于传统质心算法。但是RSSI非常容易受到外界干扰, 即使是同一个节点, 在同一个位置的发射功率也存在跳变现象, 因此完全依靠RSSI计算的权重并不能很好地根据情况变化进行调整, 导致定位结果稳定性不高。
针对上述问题, 本文提出一种改进的加权质心定位算法, 借鉴控制理论中的反馈思想, 计算每一次算法定位后的误差, 如果误差超过给定阈值, 则对利用RSSI计算出的距离进行动态修正; 否则, 距离不做改动。那么这里存在一个问题, 即如何实时地判定一次定位结果是否满足误差要求。理论上, 应该通过计算真实坐标与算法定位坐标之间的均方误差, 但是实际情况中并不知道未知节点的真实坐标, 所以直接计算定位误差的方式无法实现, 故本文采取一种间接方式来计算误差。现在能够得到的信息包括:通过RSSI计算得到的未知节点与锚节点之间的距离
根据式(4), 距离的动态调整公式为:
式中:thr为根据经验给定的阈值, 通常情况下, 质心算法的定位误差大约为2 m, 根据三角形定理, 即三角形两边之差要小于第三边, 所以thr应该小于2 m, 再考虑到通过RSSI计算距离存在一定的误差, 所以本文建议thr取值范围为1~1.5 m。
本文提出的改进加权质心定位算法的实现步骤为:
步骤1 锚节点周期性地向相邻节点广播发送自身信息, 包括节点ID和位置坐标。
步骤2 按照事先设定的数量
步骤3 根据式(1)(2)计算出未知节点与锚节点之间基于RSSI的距离集合
步骤4 通过加权质心算法计算出未知节点的位置估计值
步骤5 根据式(4)(5)对距离进行调整修正。
步骤6 重复步骤(4)和步骤(5), 直到定位误差满足要求为止。
在未知节点接收锚节点信息的过程中, 除了由于自身传感器原因而造成的发射功率跳变以外, 传输环境和信道能量等原因也会引起RSSI的随机变化, 混入大量噪声, 从而导致所计算的距离存在较大误差, 因此必须对得到的RSSI进行有效滤波。
UKF算法是一种非线性滤波算法, 其原理是利用采样策略逼近函数的非线性分布。该算法的最大优点是无需计算系统方程的雅克比矩阵, 因此其计算复杂度要明显低于KF、EKF等算法, 而且滤波精度也较高。UKF算法也存在如下的缺陷:首先, 目前经常采用的Sigma点采样策略基本都是对称采样, 在这个过程中, 需要
针对上述问题, 本文提出两种改进措施:在Sigma采样过程中, 采用改进的最小偏度采样策略, 有效降低算法计算量, 提高实时性; 采用衰减记忆法滤波逐渐减小原来测量值的权重, 有效降低测量值对估计值的影响, 实现对滤波发散的有效抑制。
考虑一个一般的非线性模型:
式中:
改进UKF滤波算法的实现过程为:
(1)算法初始化
初始状态
(2)Sigma点集及其权系数生成
选择
(3)初始向量迭代
输入状态为1维时:
输入状态大于1维时:
(4)嵌入均值和协方差信息
从上述的采样策略可以看出, 其无法保证预测方差矩阵的半正定性, 本文通过引入调节因子的方法来解决这一问题, 如下所示:
(5)时间方程更新
(6)测量方程更新
(7)计算滤波增益
从式(16)和式(19)可以看出, 本文利用衰减记忆方法对噪声统计模型进行了改进, 分别用
根据经验, 同一地点RSSI的变化不大, 因此可建立关于RSSI的状态空间方程如下:
式中:状态
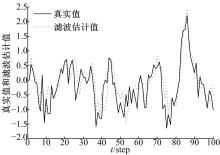
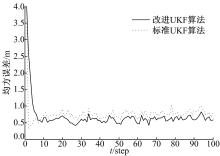
利用改进UKF算法对RSSI进行滤波, 考查滤波估计值与RSSI真实值之间的跟踪效果, 如图1所示。在同样条件下, 进行100次蒙特卡罗实验, 比较两种算法对RSSI滤波的估计值与真实值之间的均方误差, 结果如图2所示。
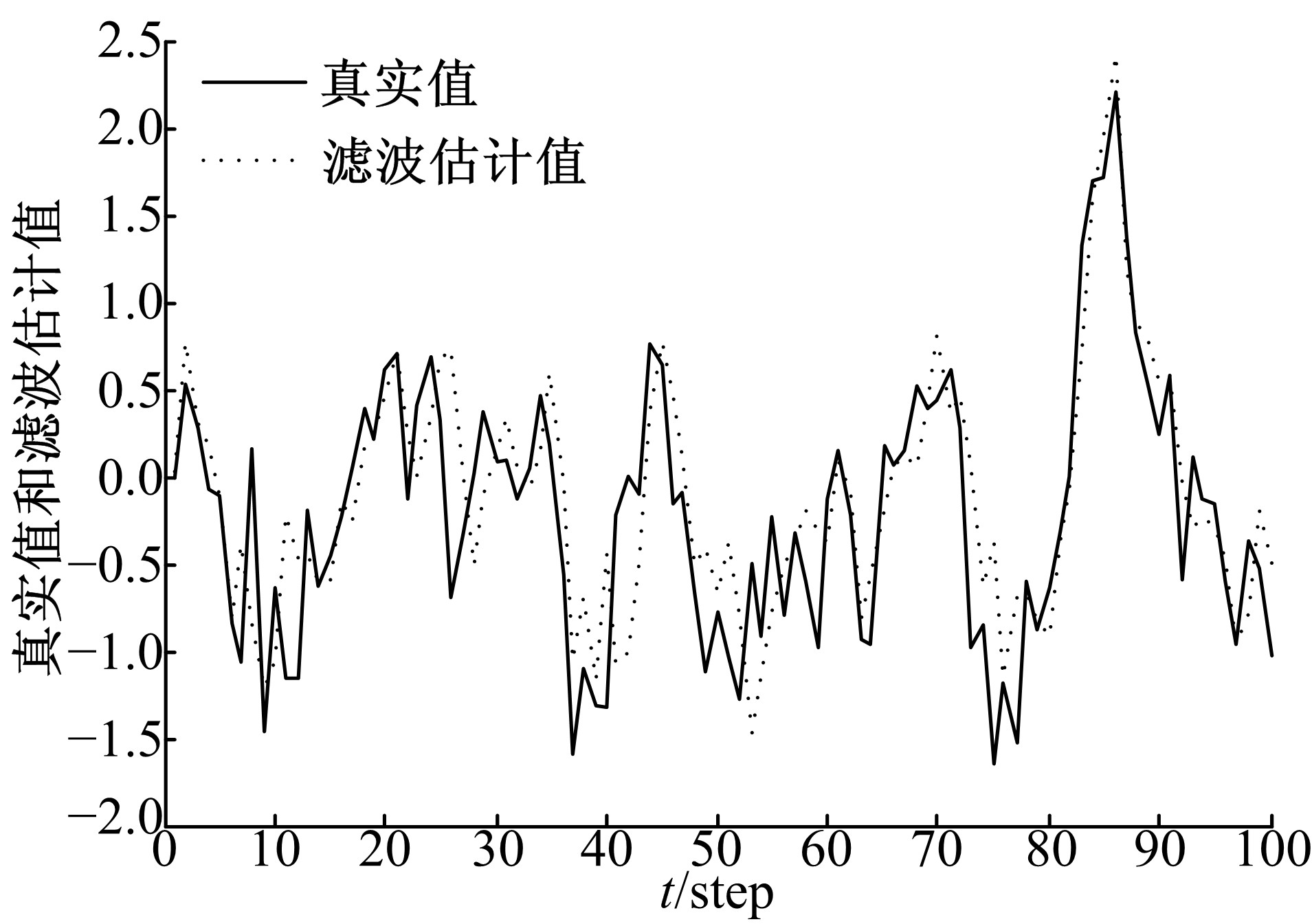 | 图1 滤波估计值与真实值跟踪图Fig.1 Filter and true value tracking graph |
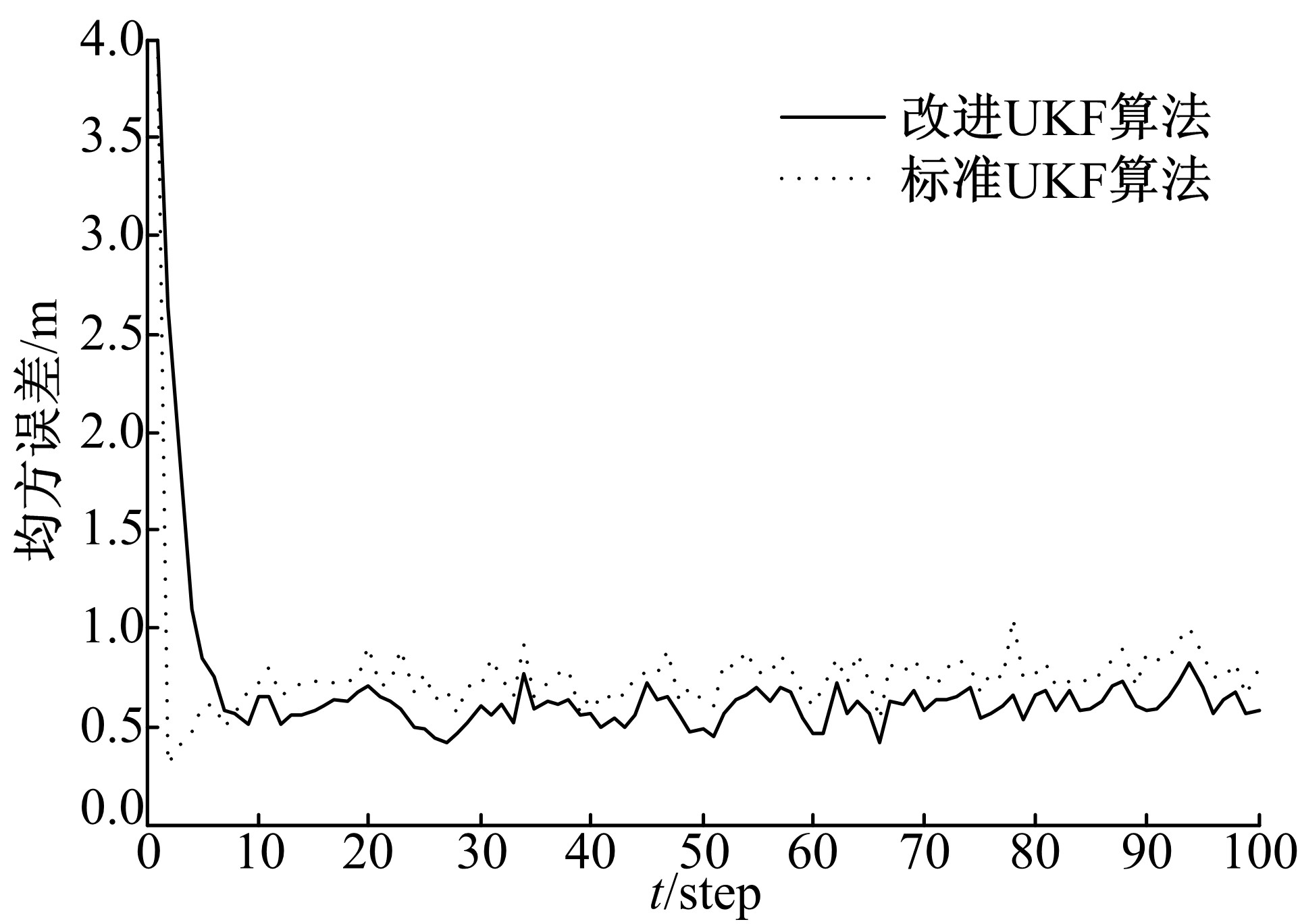 | 图2 滤波均方误差比较Fig.2 Comparison of mean square error filter |
从图1和图2的结果可以明显看出, 本文提出的改进UKF算法对RSSI值的滤波性能良好, 滤波估计值可以非常好地跟踪真实值; 而均方误差的结果也显示, 改进后的UKF算法, 其整体性能要优于标准UKF算法, 滤波精度明显提升。
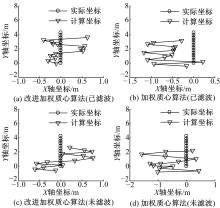
本文模拟建立了一个移动目标室内定位系统, 系统由一个无线网卡和9个路由器组成, 9个路由器按照3× 3矩阵形式排列, 实验空间设置为20 m× 5 m(长× 宽), 面积约为100 m2。
在实验过程中, 分别利用传统加权质心定位算法和改进加权质心定位算法, 在RSSI未滤波和已滤波的情况下, 对移动目标进行跟踪定位, 结果如图3所示。
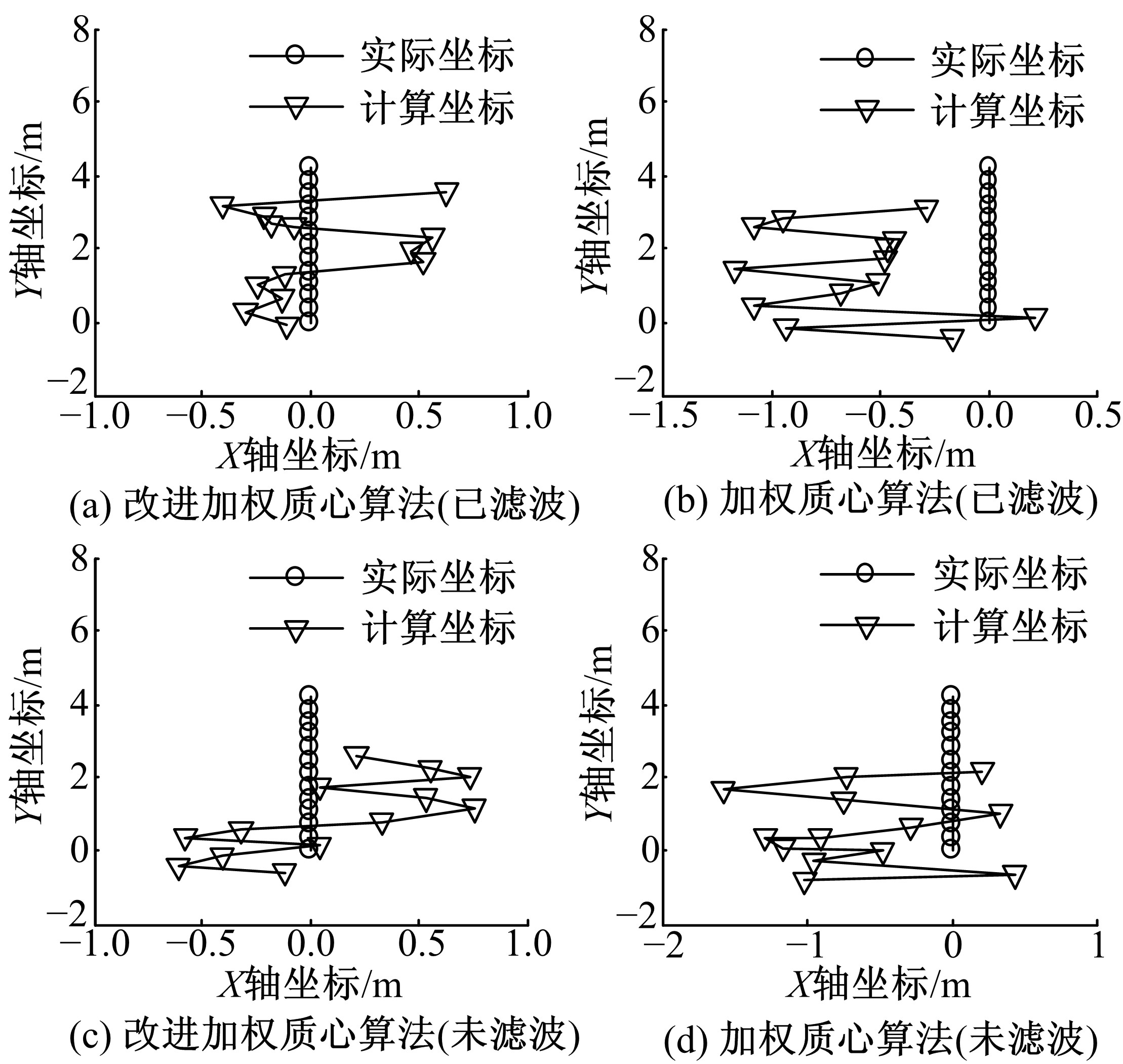 | 图3 算法定位结果Fig.3 Localization algorithm results |
从图3的定位结果可得到如下结论:
(1)RSSI对于定位结果有较大影响。对RSSI进行滤波以后的定位结果要明显好于未滤波的情况, 而且滤波以后的坐标分布较为集中, 说明结果稳定性更好。
(2)改进的加权质心算法的定位精度要明显高于传统加权质心算法。算法计算得到的坐标与实际坐标之间更为接近, 在上一次定位结果出现较大偏差以后, 明显有修正趋势, 说明本文算法利用定位误差对距离进行修正, 进而提高定位精度的策略是正确而有效的。
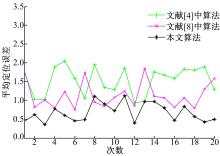
在同样的实验条件下, 与文献[4]和文献[8]中算法的定位结果进行了比较, 主要考查平均定位误差这个指标, 结果如图4所示。
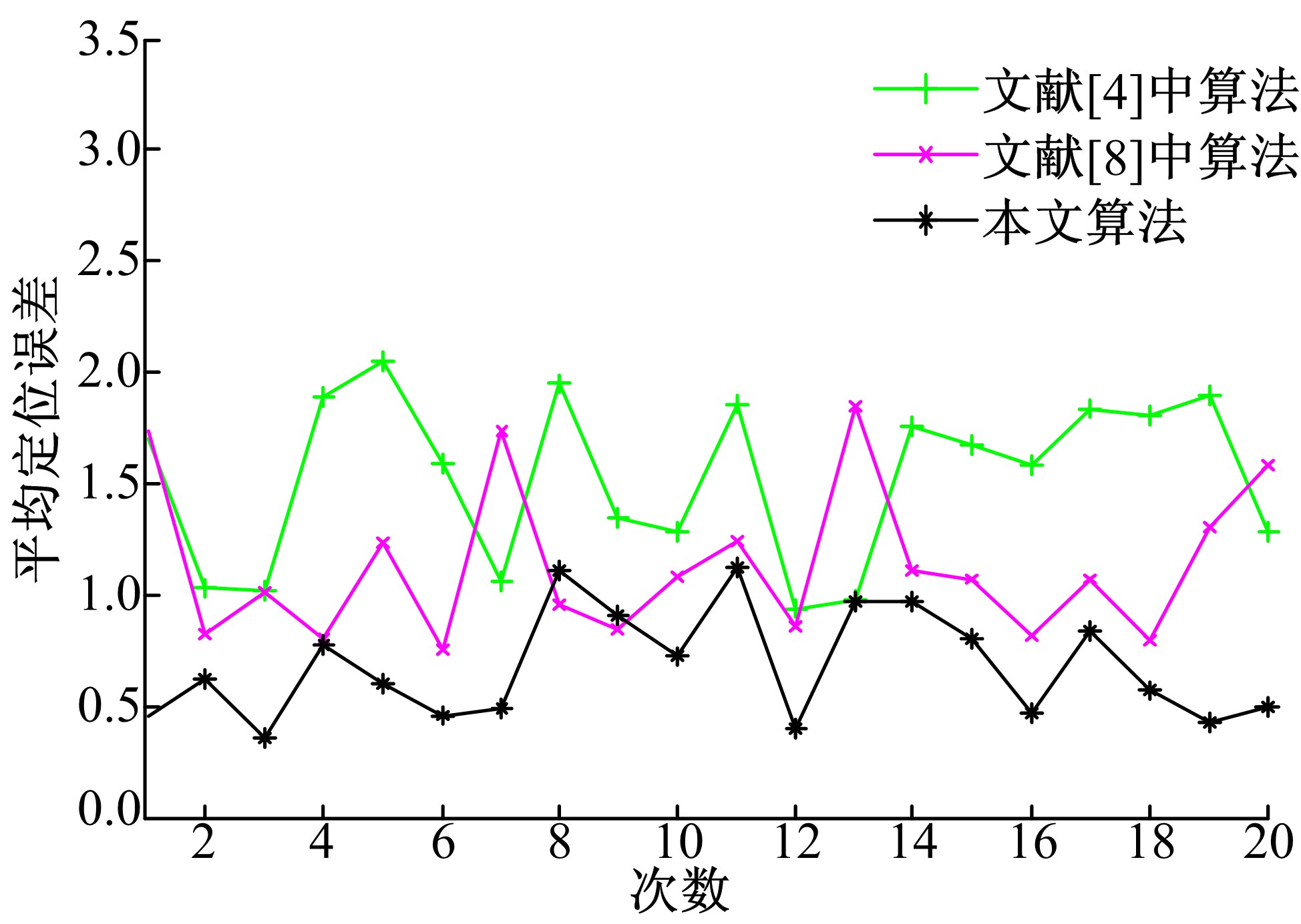 | 图4 平均定位误差结果比较Fig.4 Result comparison of average error of location map |
由图4的结果可知, 本文算法的平均定位误差最小, 仅为0.67 m, 文献[8]和文献[4]的定位精度要明显低于本文算法, 平均定位误差分别为1.13 m和1.52 m。这主要是因为本文算法对传统加权质心算法进行了有效改进, 利用定位偏差合理修正了RSSI距离, 并且利用改进UKF算法对RSSI值进行了滤波。而文献[4]中算法的实质就是传统加权质心定位算法, 只不过换了一种形式; 文献[8]中算法虽然对传统加权质心算法进行了一定的改进, 但是权值分配主要考虑了两个锚节点对于未知节点的影响; 而且这两种算法都未考虑RSSI的滤波问题, 故定位精度不高。
针对传统基于RSSI的质心定位算法静态分配权重的缺点, 提出利用定位误差对基于RSSI的距离进行修正, 从而降低定位误差, 有效提高了定位精度。对于硬件本身和环境因素引起的RSSI不稳定、带有噪声的问题, 提出了一种改进的UKF滤波算法, 采用改进的最小偏度采样策略, 有效降低了标准UKF算法的计算量, 提高了实时性, 同时采用衰减记忆滤波方法, 有效降低了测量值对于估计值的影响, 实现对于滤波发散的有效抑制。仿真实验表明, 本文提出的基于RSSI的改进加权质心算法的定位精度明显提高, 而改进的UKF滤波算法的稳定性和滤波精度也大大优于标准UKF算法。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|