{kind=link}
{kind=link}
基于灰色关联的车联网信道负载预测算法
[莫元富 , 于德新, 郭亚娟]
, 于德新, 郭亚娟]
, 于德新, 郭亚娟]
|
|


作者简介:莫元富(1984-),男,博士研究生.研究方向:车联网交通信息处理,车间通信.E-mail:496629815@qq.com
研究了一种基于灰色关联的车联网信道负载预测算法。首先,使用灰色关联分析法考察信道负载与其影响因素时间序列之间的相关性,选出影响信道负载的主要因素。然后,根据相应的多元关系模型,建立基于卡尔曼滤波递推的信道负载预测算法。最后,使用交通调查方法采集长春市某交通干道上的浮动车数据,进行信道负载预测。实验结果表明:本文所提出的算法具有较高的预测精度,且具有较好的自适应性和鲁棒性。
A grey-relational based algorithm for wireless channel is put forward in Vehicle Ad-hoc Networks (VANETs). First, by examining the relationship between channel load and its influence factors of time series, a grey correlation analysis method is proposed to select the main factors that affect the channel load. Then, according to the multiple relationship model, the channel load prediction algorithm based on Kalman filter recursion is developed. To verify the effectiveness of the channel load prediction algorithm, a traffic survey method is employed to conduct a short-term channel load forecasting experiment. Traffic data on a segment of Changchun urban road is collected using a floating car. The experimental results show that the proposed algorithm is effective with higher prediction accuracy and good performance in adaptation and robustness.
在车联网系统中, 智能汽车可以相互协作来避免危险状况和交通事故。通过周期性地交换单跳广播状态消息(包含车辆当前的地理位置、速度、行驶方向等)可以建立车辆之间的相互感知, 用来检测危险交通状况, 如交通堵塞或超车车辆, 这种周期性的随时间变化的状态交换信息称为信标。在高密度通信环境下, 如何避免车辆生成大量的信标消息而导致无线通信性能退化(即拥塞控制问题)是车联网面临的严峻问题[1]。
车联网应用中, 高的信标生成速率可以增加车辆位置信息的准确性, 但这种无法控制的策略会导致信道饱和及拥塞, 从而出现较高的消息冲突率。在已有的文献中[2], 许多研究都认为VANET(Vehicular ad-hoc network, 车联网、车载网络)需要设计控制无线信道负载的策略, 通过控制负载可以避免饱和信道条件对无线通信性能的负面影响。周期性信标信息是VANET的基本组成部分。Allouche等[3]的研究认为即使是周期性状态信息也会使无线信道达到饱和。王昭然等[4]提出一种新的基于跨层设计的拥塞控制机制, 通过向传输层提供有用的路由信息及车辆运动信息预测分组丢失的原因, 并针对不同情况采取不同的拥塞控制策略。许燕[5]针对车载自组网的特殊性, 提出了一种基于缓冲区优化的拥塞预防策略, 对缓冲区内的消息包进行一定的丢包, 尽可能地降低网络拥塞发生的可能性, 该策略合理分配了信道, 显著提高了网络的吞吐量。张伟等[6]利用车辆节点估算信道占用率并计算发送概率, 能够动态调整信道拥塞程度并有效缓解冲突。以上研究均是基于当前的信道条件来调节周期性信标消息生成, 从而达到控制信道负载的目的, 但是无法从根本上避免信道拥塞。最具前瞻性的方法是通过预测接下来时刻整个信道的负载, 根据预测值预先调整信标消息的生成和传输, 从而在第一时间阻止信道拥塞[7]。关于车联网信标通信负载预测算法的研究, 国内外未见相关报道。
在“ 与位置相关的周期性信标通信” 环境下, 本文研究了一种基于灰色关联的车联网信道负载预测算法。采用灰色理论对信道负载序列的各个影响因素进行灰色关联度分析, 根据关联程度大小确定信道负载的主要影响因素, 并建立回归模型进行卡尔曼滤波预测。
车联网是一个由道路交通网络和通信网络构成的非线性大系统。车辆行驶中通信过程形成的信道负载受到车辆操作特性、车辆性能、交通流状态、配置通信参数、通信环境以及其他随机因素的影响。周期性状态消息(信标消息的主要来源)产生信道负载。就每辆车周围的信道负载而言, 不仅受车辆的期望消息生成率、消息平均大小、配置传输功率、信道衰落条件影响, 而且与道路交通流量、密度以及交通事件等因素有关。为了提高对车联网中车辆节点周围信道负载的预测精度, 应该考虑邻近区域内节点的通信参数、通信环境和交通流等影响因素, 从而建立信道负载的多元关系模型。然而, 车辆节点在不同道路和通信环境下受到的影响存在一定差异, 不同因素的影响程度也有所不同, 这就需要采用关联度分析法来确定各影响因素对信道负载的影响程度。
测度关联程度的方法主要有四类:耦合关联度模型、熵变方程法、区间值判断法和灰色关联分析法[8]。其中灰色关联分析法根据因素之间的相似和相异程度来衡量因素之间关联的程度, 不需要计算统计特征量, 适用于贫信息系统分析[9]。考虑到信道负载和通信环境参数、交通流之间相互作用的随机性和不确定性, 这些影响因素采集的样本数据量有限, 反映的信息不确切、不全面, 具有灰色性, 因此本文选用灰色关联分析法。
以信道负载数据序列作为因变量参考数据列, 通信环境参数和交通流数据序列作为自变量比较数据列。根据以下计算步骤确定本路段的信道负载主要影响因素的关联程度:
Step1 数据无量纲化处理。在进行关联分析之前, 鉴于原始数据的不同量纲, 需要对原始数据进行极差标准化无量纲处理, 将不同时空的数据转化为可比较的标准化数据。对于原始数据的处理, 采用标准化变换法。
Step2 生成差值数据序列。将无量纲化后的标准数据序列进行求差, 即将标准化后的因变量数列和自变量数列求差取绝对值。得到的差值为:
Step3 根据邓氏关联度计算方法, 计算关联系数。
式中:
Step4 将计算得到的关联系数
FCC(Federal communications commission)为车联网应用在5.9 GHz频率上分配25 MHz的频段, 整个频段分为7个宽度为10 MHz的信道, 其中1个信道预留用于安全相关的信息交换, 其余6个用于非安全应用(FCC 2004), IEEE 802.11p为10 MHz的信道提供的数据传输速率为3~27 Mbit/s。
将卡尔曼滤波理论应用于通信预测具有模型参数少、计算方便的特点[10, 11], 但其常规模型是根据信道负载的历史数据, 进行下一时段的信道负载预测没有考虑影响信道负载的多种因素, 从而导致在预测精度和自适应性上存在缺陷。因此, 需要在选取可能的影响因素基础上建立信道负载的多元关系模型。本文结合卡尔曼滤波理论的特点, 选出信道负载的
Step1 建立反映信道负载与影响因素之间的多元线性回归方程组:
式中:
式中:
Step2 由式(2)建立状态方程, 令
式中:
Step3 初始化滤波方差矩阵
Step4 递推计算滤波系数:
Step5 状态更新:
式中:
Step6 令
Step7 计算信道负载的预测值:
文献[14]指出, 为了提高安全应用所需的精确度, 车辆每秒钟要产生若干条位置状态消息, 尤其对于非常紧急的安全应用, 如协作式前向碰撞警告, 周期速率可能要达到每秒10~20条, 甚至更多。文献[15]指出, 根据现有的签名算法, 数字签名和证书, 周期性状态消息的大小在250~800 bit。
为了验证本文提出的卡尔曼滤波信道负载预测算法的有效性, 采用交通调查方法使用浮动车在长春市人民大街的一个路段(解放大路到南湖大路之间)进行数据采集。浮动车每隔5 min采集1次附近500 m范围内的车辆数、交通流密度、车速等数据, 数据规模为300, 最后24个数据作为检验样本, 以信道负载序列为研究对象, 进行短期信道负载预测实验。
为计算方便, 假定每辆车的传输功率为10 dBm, 通信距离为500 m, 周期性状态消息的大小为800 bit, 生成速率为20个/s, 可根据下面公式计算出浮动车周围的信道负载, 以此作为实测信道负载值。
式中:
为简化灰色关联程度分析过程, 本文只根据实测信道负载值和采集的交通流参数(假定通信环境参数固定不变)计算分析信道负载的主要影响因素。选取关联程度最大的一个因素作为信道负载回归模型的参变量。利用灰色关联度分析方法计算得出, 交通流密度与研究对象数据序列关联程度最大。据此, 建立信道负载序列的回归模型, 利用最小二乘法得到回归模型参数值, 根据信道负载的观测值和卡尔曼递推公式得到信道负载的单步预测值。为了比较预测的结果, 引入预测相对误差rerr:
式中:
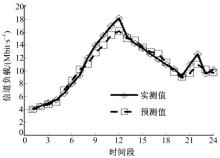
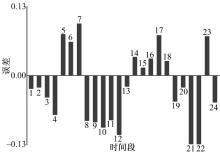
预测结果如图1、图2所示, 可以看出, 本文算法考虑了影响信道负载的主要影响因素, 最大预测误差为13%, 预测精度令人满意, 说明本算法用于预测信道负载是有效的。
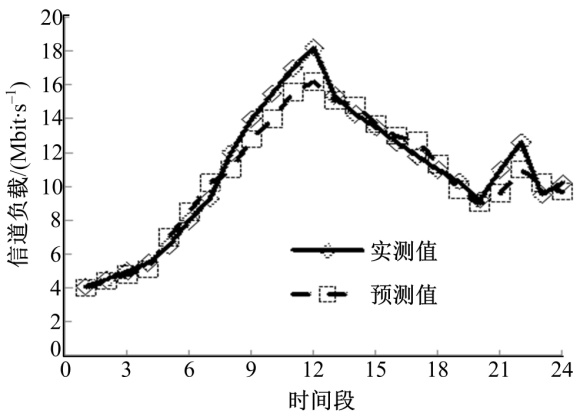 | 图1 信道负载卡尔曼滤波预测结果Fig.1 Cannel load prediction result of Kalman filter |
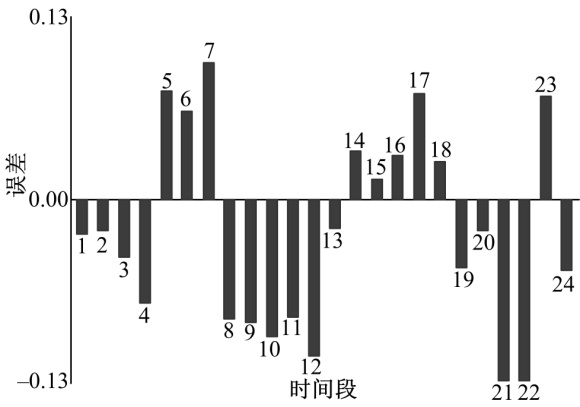 | 图2 信道负载卡尔曼滤波预测结果相对误差Fig.2 Relative error of channel load prediction results |
本文运用灰色关联分析选取影响信道负载的主要因素, 建立了回归方程并进行卡尔曼滤波递推预测。实验表明, 本算法具有较高的预测精度, 达到了预期的效果。由于条件所限, 本文没有对通信环境参数与交通流参数之间的相互影响关系进行分析, 同时未能对交通事件对信道负载预测精度的影响进行探讨。另外, 本文的研究仅针对周期性信标通信所造成的信道负载, 实际上, 在车联网中还有其他各种信息需要传输, 如导航信息、传感器信息、紧急状态信息等, 如何在多种信息源混杂的情况下实现信道负载的有效预测是下一步研究的方向。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|