


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
双基地MIMO雷达的快速测向算法
[刘声1, 2  , 杨力生
, 杨力生1, 2 , 殷艳红1, 2 , 许锦1, 2 , 曹海林1, 2 ]
, 杨力生, 殷艳红|
|


作者简介:刘声(1984-),男,博士研究生.研究方向:阵列信号处理.E-mail:gzuliusheng@163.com
提出了一种双基地MIMO雷达的离开角(DOD)和到达角(DOA)的快速估计算法,本算法需要结合已有的测向算法才能完成DOA、DOD的联合估计。首先,利用已有的算法将DOD估计出来。然后,利用已估计出来的DOD将多目标模型分解成多个单目标模型,从而完成DOA的快速估计。 在DOA的估计过程中,不需要任何的奇异值分解和谱峰搜索,而且能够实现自动配对。本算法的主要优点是在保证估计精确度的前提下简化原算法,即使在DOD未能被精确估计的前提下,依然能得出比较理想的DOA估计。仿真实验证明了本文算法的有效性。
A fast estimation algorithm for Direction of Departure (DOD) and Direction of Arrival (DOA) in bistatic MIMO radar is proposed. This algorithm should be used in conjunction with an existing algorithm to perform the estimation. First, the DOD is estimated by an existing algorithm. Then the estimated DOD is used to divide the multi-objective model into many single-objective models. Finally, the DOA can be estimated quickly without Singular Value Decomposition (SVD) and peak search. Besides, no pair procedure needs to be implemented in this process. The main advantage of the proposed algorithm is that it can simplify the original algorithm and ensure the estimation accuracy. Simulation results demonstrate the validity of the proposed algorithm.
多输入多输出(Multiple-input multiple-output, MIMO)雷达是利用多元阵列天线同时发送和接收信号的新型雷达系统, 在通信领域里已有了广泛的应用[1]。MIMO雷达的性能相比于传统的相控阵雷达有着明显的优势, 而对于MIMO雷达的测向研究也成为当前的一个热点问题。Zhang等[2]提出了一种针对单基地MIMO雷达的降维ESPRIT算法, 从而有效地降低了传统算法的计算复杂度。Li等[3]将Zhang[2]的降维思想扩展到二维到达角(DOA)的估计上, 提出一种基于双平行线阵的单基地MIMO雷达的二维DOA估计算法。相比于单基地MIMO雷达, 双基地MIMO雷达的测向需要同时估计离开角(DOD)和DOA。Chen等[4, 5]先后提出了两种基于不同配对思想的ESPRIT算法实现对DOD与DOA的联合估计。Bencheikh等[6]在Chen[4]的基础上将ESPRIT算法与MUSIC算法结合在一起提出了一种ESPRIT-MUSIC算法。Xie等[7]利用Capon算法的原理将DOA、DOD的估计问题转化成一个瑞利方程求解的问题, 并能实现自动配对。Zheng等[8]利用大孔径阵列提高估计的精确度, 并且使用酉变换来降低计算的复杂度。为了减少计算量, 陈金立等[9]提出了避免高维特征值分解和谱峰搜索的PM算法。孙中伟等[10]将PM算法扩展, 提出了一种双基地MIMO雷达的四维角联合估计算法。然而, 这些算法大多数都需要两次计算量较大的估计才能够将DOA和DOD估计出来, 有些算法还需要额外的配对程序。
本文提出一种降低复杂度的算法, 只需使用一种已有的算法就能将DOD估计出来, 再利用已经估计出来的DOD便可将DOA快速估计出来。即便在DOD的估计精确度不高的情况下, 也能得到精确的DOA估计。这种算法可以与各种已有的算法相结合, 降低原算法的计算量, 而且估计性能接近甚至超过原来的算法。
考虑一个双基地MIMO雷达系统的发射阵列为
式中:
设协方差矩阵为
式中:
首先, 假设DOD已经由已有算法[4, 5, 6, 7, 8, 9]估计出。不妨设
令
式中:
构造互相关矩阵
令
式中:
不妨设
从而有:
根据式(6)可知:
由式(7)可得
令
由式(9)可知:
令
由推导过程可知
对于有些算法, 除了要进行两次计算量较大的估计才能将DOA和DOD估计出来, 还需要使用一些配对技巧才能最终实现对DOA、DOD的联合估计。但是, 如果利用本文算法, 只需要使用一次DOD估计算法, DOA便可快速地被估计出来, 且无须担心参数失配的情况出现。
本文算法是需要与已有的算法联合使用才能完成对DOA和DOD的联合估计。现在就以PM算法和ESPRIT算法为例来说明本文算法在计算复杂度上的优势。由文献[9, 11]可知,
通过4组仿真实验来验证本文算法的有效性。双基地MIMO雷达的结构如图1所示, 假设接收阵元数
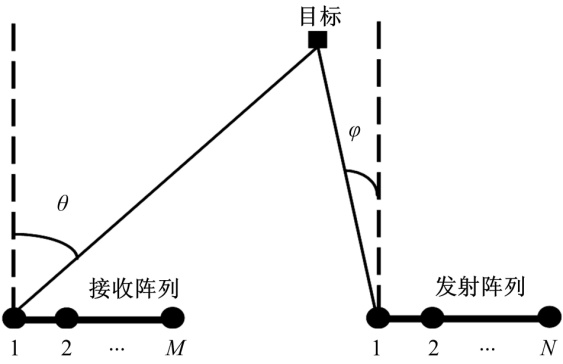 | 图1 双基地MIMO雷达结构Fig.1 Array configuration of bistatic MIMO radar |
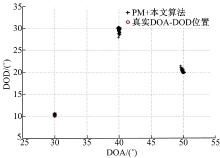
实验1 验证本文算法配合PM算法使用时对DOD、DOA联合估计的效果以及配对情况。设3个目标的DOA、DOD分别为
 | 图2 实验1估计结果Fig.2 Estimation results of experiment 1 |
实验2 验证本文算法配合ESPRIT算法使用时对DOD、DOA联合估计的效果以及配对情况。首先, 设3个目标的DOA和DOD分别为
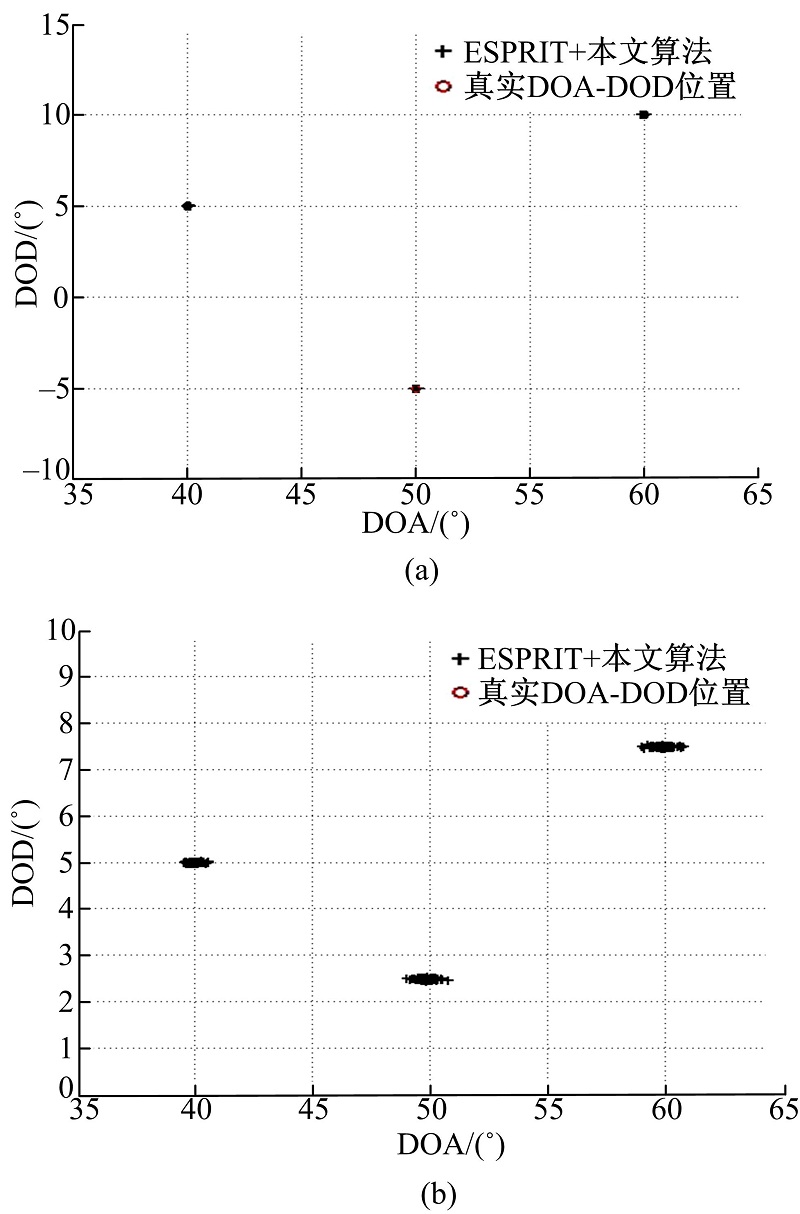 | 图3 实验2估计结果Fig.3 Estimation results of experiment 2 |
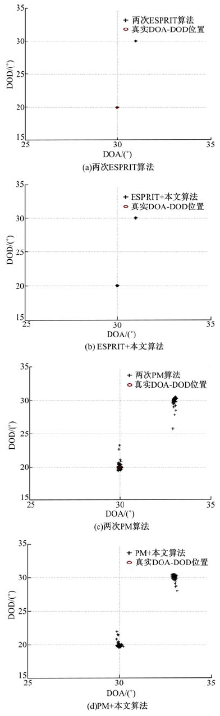
实验3 对比ESPRIT算法加本文算法, PM算法加本文算法, 两次ESPRIT算法以及两次PM算法对角度的分辨能力。事实上, 本文算法只是应用于DOA的估计, 所以仅比较4种算法对DOA的分辨率。首先, 设两个目标的DOD为
 | 图4 实验3估计结果Fig.4 Estimation results of experiment 3 |
实验4 对比ESPRIT算法加本文算法, PM算法加本文算法, 两次ESPRIT算法以及两次PM算法对DOD、DOA联合估计的精确度。3个目标的DOA、DOD分别固定为
式中:
图5(a)给出了采样数固定在200时4种不同算法的估计RMSE随信噪比的变化曲线。图5(b)给出了SNR固定在7.5 dB时4种不同算法的估计RMSE随采样数的变化曲线。从图中可以发现, 本文算法加PM算法的估计效果比使用两次PM算法的效果略好。两次ESPRIT算法的效果要比本文算法加ESPRIT算法的效果略好, 但是前者的计算复杂度明显高于本文算法。除此之外, 从图5(a)还可以看出, 信噪比越低本文算法配合ESPRIT算法的估计效果就会越接近两次ESPRIT算法。从图5(b)可以发现, 4种算法的估计性能随着采样数的减少而降低, 但即使是采样数只有50时, 本文算法也有较好的估计效果。因此, 实验也能说明本文算法对噪声和采样数都有较好的鲁棒性。
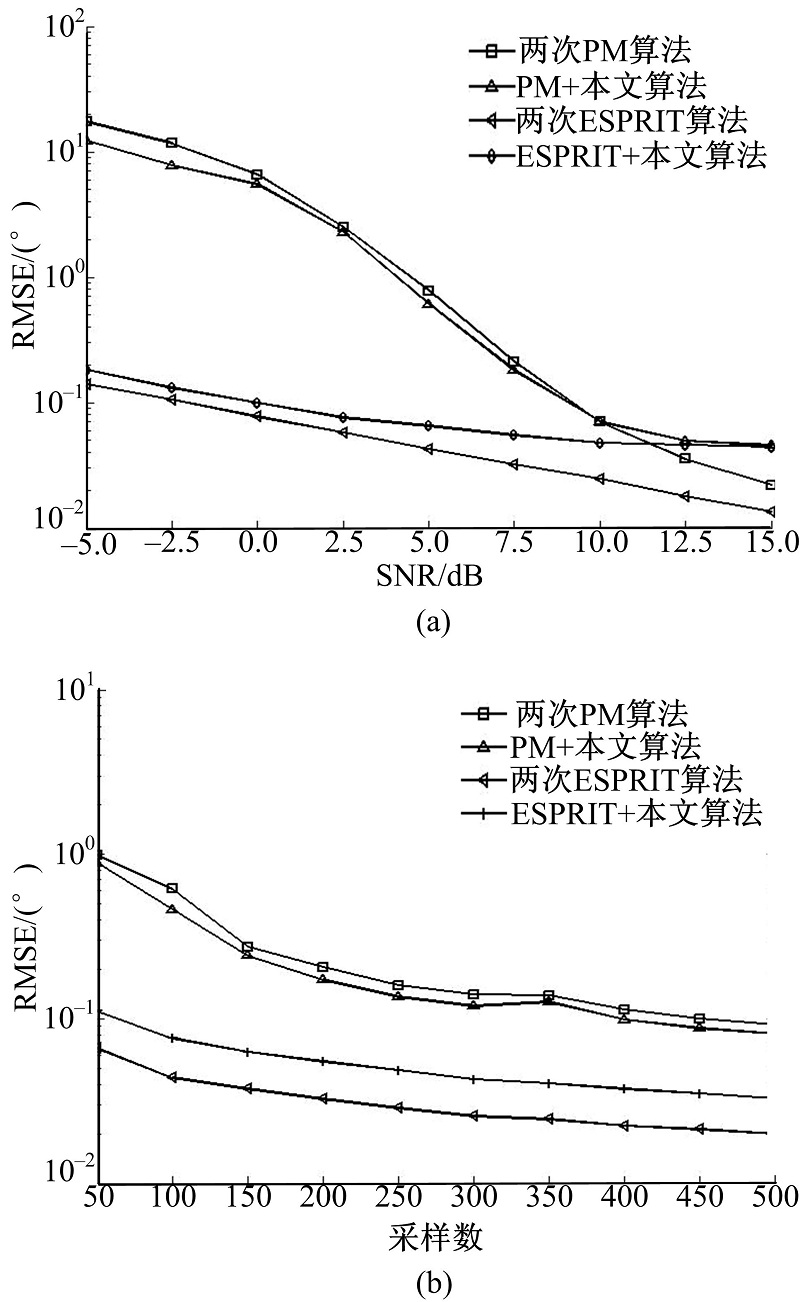 | 图5 实验4估计结果Fig.5 Estimation results of experiment 4 |
提出了一种配合其他算法来降低计算复杂度的双基地MIMO雷达测向算法。算法的主要思想是先利用已有的算法将目标DOD估计出来, 然后利用已估计出来的DOD实现对DOA的快速估计, 而且能使DOA与DOD自动配对。计算复杂度分析和仿真实验表明, 该算法具有较低的计算复杂度和较好的估计精确度。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|