


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于均值滤波的改进 Canny 算法在核磁共振图像边缘检测中的应用
[李健1, 2  , 李赫宇
, 李赫宇1, 3 , 姚汝婧1 , 吴林2, 4 ]
, 李赫宇]
|
|


作者简介:李健(1981-),男,副教授,博士.研究方向:时空表示与推理,偏微分方程,物联网.E-mail:liemperor@163.com
以腰椎间盘的核磁共振图像(MR图像)为研究对象,采用Canny算法进行边缘提取,并针对MR图像灰度变化不明显的特点,预先对图像分别进行对比度增强和锐化处理。同时针对Canny算法中由于高斯滤波器导致的噪声敏感性问题,对传统Canny算法进行改进,将高斯滤波器改为均值滤波器。试验结果表明,相比于传统算法,运用基于均值滤波改进的Canny算法对增强对比度后的MR图像进行边缘检测,在真实边缘检出率相同、算法复杂度相同的情况下,噪声检出率降低了90%。
In this paper, the Magnetic Resonance Images (MRIs) of lumbar disc are taken as the research objects, and the Canny edge detection algorithm is applied to extract the edge. To overcome the problem that the difference of the gray of the MRI edge is not obvious, enhance contrast and sharpening processing are used to process the image in advance. To solve the problem that in Canny algorithm Gaussian filter may lead to noise sensitivity, the Gaussian filter is replaced by an average filter to improve the performance of the Canny algorithm. Experimental results show that, compared with traditional algorithm, the noise of the image is reduced by 90% by using the improved Canny algorithm to detect MRI after enhancing the contrast.
核磁共振成像(MRI)是断层成像技术中的一种, 它利用磁共振现象从人体中获得电磁信号, 并重建出人体信息。MRI已经可以应用于全身各系统的成像诊断, 尤其对于颅脑、脊髓、心脏大血管、关节骨骼、软组织等成像效果更佳, 且对人体没有伤害。同时, 相比于CT、X射线成像等其他医学成像技术, MRI可以做多个切面图, 且空间分辨率更高, 相比于其他医学图, MR图像所包含的信息更多。由于MR图像中存储着巨大的信息, 而有些信息通过人工手段无法获取, 因此利用计算机智能算法辅助处理MR图像已经成为一种趋势。
在MR图像中不同结构的解剖和病理的断面是以不同的灰度来显示[1]。同一灰度表示相同的断面, 因此信息量较小, 而大量信息储存在灰度剧烈变化的地方, 也就是图像边缘[2]。随着信息技术的不断发展, 图像边缘检测技术在很多领域有着极为重要的作用[3, 4]。从1965年起, 通过提取高频信号进行检测的Roberts算子[5]被提出, 但其效果并不理想, 之后学者们相继提出了Prewitt算子[6]和Sobel算子[7], 这些算子在图像没有噪声的情况下能实时、准确地检测出图像边缘, 且运算过程简单, 但是当图像含有噪声时, 由于算子对噪声的敏感性导致很难区分图像的噪声和边缘, 造成假边缘和边缘漏检的现象。同时, 检测出的图像边缘模糊, 边缘精细度不高, 所以在实际处理图像中效果并不理想。相比这些微分算子, 基于最优化算法的Canny算法[8, 9]因具有信噪比大和检测精度高等优点而被广泛应用, 并且成为评价其他边缘检测方法的标准。
传统的Canny算法在检测一般图像时具有较大的优势, 但是对于MR图像这类特殊图像具有一定的局限性, 原因在于MR图像相比于传统图像只存在灰度值, 而由于人体结构的复杂性, 使得灰度阶变化范围较小, 导致了在进行计算机处理时算法识别不准确, 传统的Canny算法在检测时同样存在检测到假边缘以及真实边缘检测模糊的现象。基于以上不足, 本文对传统Canny算法进行改进, 使它对MR图像有较好的适应性。
(1)一维高斯滤波函数
式中:
(2)计算梯度的幅值和方向。具体步骤为采用2× 2邻域内一阶偏导的有限差分计算
2× 2邻域模板的形式如下:
(3)对梯度幅值进行非极大值抑制, 找到
(4)双阈值法检测并连接边缘。具体步骤为:对图像
由于MRI只有黑白灰三色组成, 其图像边缘相比于一般图像不明显。在Canny算法进行检测过程中由于一维高斯函数对图像的不敏感性, 可能导致检测出假边缘以及真边缘无法检出的问题。基于以上不足, 本文考虑对图像进行预处理, 即在高斯滤波之前使图像的内部与图像的边缘有明显区分, 从而进一步提高算法的边缘检出率。
针对MR图像存在的对比度不明显的特点, 本文考虑对传统Canny算法进行改进。一方面, 对图像进行预处理, 在本文中使用调整图像对比度和对图像进行锐化两种最为常见的图像预处理方法, 使图像在进行Canny算法检测前有明显的图像对比。另一方面, 使用均值滤波算子代替传统算法中的高斯滤波算子来解决传统Canny算法的噪声敏感性问题。
在传统的算法中第一步就是利用高斯函数做平滑处理, 在改进算法中, 本文针对MR图像对比度不明显的特点在高斯平滑处理前加入一步, 采用对比度增强算法和图像锐化算法两种常用的图像处理方法对原图进行对比度调整。
2.1.1 对比度增强算法
对比度增强算法[12]已经是一个相当成熟的算法, 本文直接调用Matlab中的imadjust函数来实现原图的对比度增强。imadjust函数使用的算法如下:
Step1 读取原图像数据
Step2 在
Step3 在
Step4 在
Step5 将上述图像映射到
基于上述算法, 本文定义对比度增强矩阵为
通过上述算法可以得到不同区间上的一些变化图像, 如图1所示, 其中图1(a)为原图, 图1(b)为矩阵
 | 图1 对比度增强效果比较图Fig.1 Contrast enhancement comparison chart |
2.1.2 图像锐化算法
在图像锐化算法中可以分为线性锐化滤波器和非线性锐化滤波器两类。
线性锐化滤波器中最常用的是高通滤波器。这种滤波器必须满足滤波器的中心系数为正数, 其他系数为负数。线性高通滤波器的典型系数模板
图像锐化后的结果比较如图2所示, 其中图2(a)为原图, 图2(b)为线性高通滤波图像。
 | 图2 线性高通滤波图像Fig.2 Linear high pass filtering image |
非线性锐化滤波就是使用微分对图像进行处理, 其算法是利用图像沿某个方向上的灰度变化率, 即原图像函数的梯度来锐化图像。梯度定义如下:
梯度模的表达式为:
在实际处理中, 由于数据是离散的, 幅值是有限的, 其发生的最短距离是在两相邻像素之间。因此, 在数字图像处理中通常采用一阶差分来定义微分算子:
在算法使用过程中比较有名的微分滤波器算子包括Sobel梯度算子、Prewitt梯度算子和Log算子。算法求得的结果如图3所示, 其中图3(a)为原图, 图3(b)为Sobel算子结果, 图3(c)为Prewitt算子结果, 图3(d)为Log算子结果。
 | 图3 非线性滤波图像Fig.3 Nonlinear filtering image |
Canny算法中由于高斯滤波函数导致对噪声敏感的问题, 因此本文考虑使用更为一般的算法— — 均值滤波算法[13]。均值滤波对抑制高斯噪声有较好效果, 属于线性滤波的一种, 在国内外都有专家、学者对该技术进行研究, 并且提出很多改进后的算法。由于图像已经经过预处理, 所以均值滤波算法可以更有效地过滤噪声, 而不会对真边缘产生影响。
均值滤波是典型的线性滤波算法, 它是指在图像上对目标像素给一个模板, 该模板包括了其周围的临近像素的平均值。
处理均值滤波最常用的方法是邻域平均法。其步骤为对原图像
式中:
本文采用圆形均值滤波器对图像进行边缘检测, 其基本思想同样是用某像素点邻域的几个像素灰度平均值来代替该像素的灰度值, 但是最初取值的模板是圆形模板而不是常用的矩形模板, 其邻域的选取方式不同于一般的均值滤波器。圆形均值滤波器邻域的选取通常为以单位距离
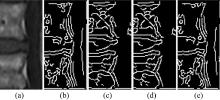
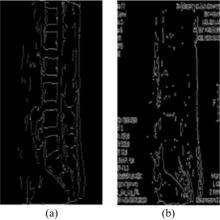
对上述原图采用Canny算法进行边缘检测, 结果如图4所示, 其中图4(a)为原图, 图4(b)为传统Canny算法检测后的边缘图像。
 | 图4 原图和边缘检测图像Fig.4 Original image edge detection |
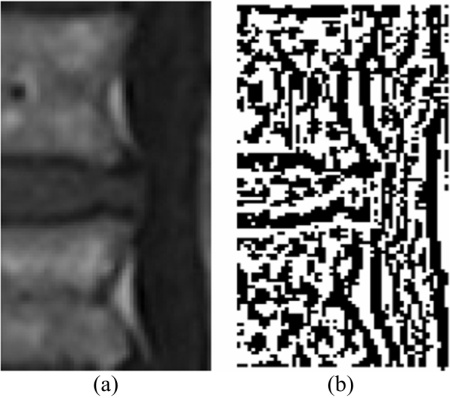
对增强对比度后图像采用改进Canny算法进行边缘检测, 结果如图5所示, 其中图5(a)为原图, 图5(b)为通过
 | 图5 增强对比度后的边缘检测图像Fig.5 Enhancing the contrast of image edge detection |
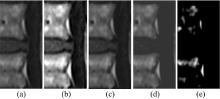
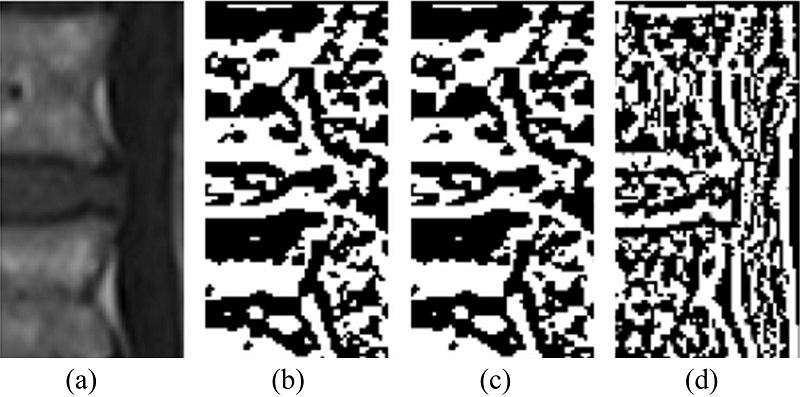
对锐化后图像采用改进Canny算法进行边缘检测, 结果如图6所示, 其中图6(a)为原图, 图6(b)为高通滤波锐化边缘, 图6(c)为Sobel算子锐化边缘, 图6(d)为Prewitt算子锐化边缘, 图6(e)为Log算子锐化边缘。
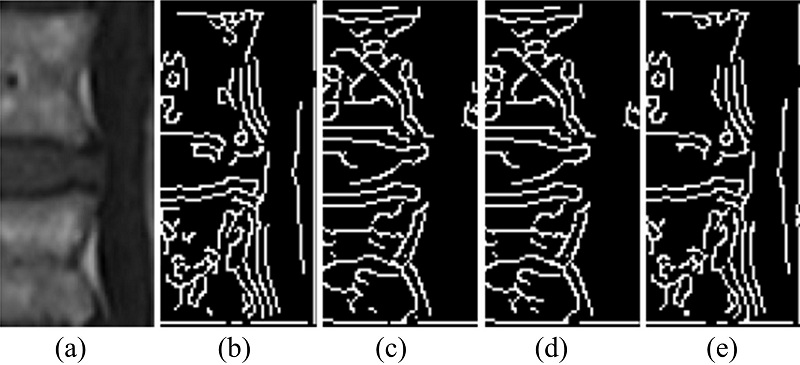 | 图6 锐化后的边缘检测图像Fig.6 Edge detection of image after sharpening |
通过腰椎间盘的MR图像片段试验对比可以看出, 图像以矩阵
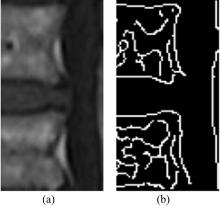
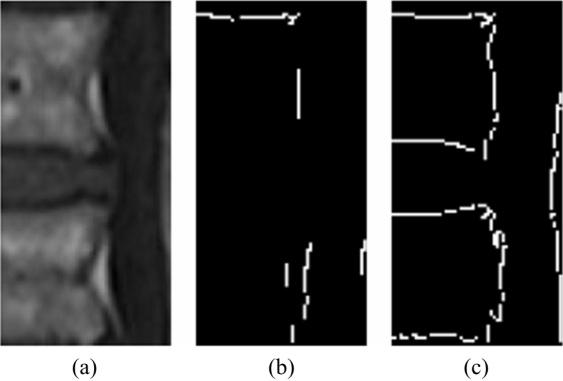
完整MR图像的边缘检测效果如图7所示, 其中图7(a)为原图, 图7(b)为传统Canny算法检测的图像, 图7(c)为通过
 | 图7 完整MR图像边缘检测图像Fig.7 Complete MR image edge detection |
从图7中可以看出, 对比度增强后再运用基于均值滤波改进的Canny算法可以较为完整地保留图像边缘的信息, 同时有效地过滤掉了图中不需要的噪声, 减少了90%假边缘的检出。
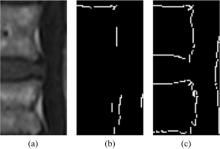
2014年, 王贵彬[11]提出了基于Canny算子与形态学融合的边缘检测算法, 将本文算法与王贵彬算法进行比较, 结果如图8所示, 其中图8(a)为本文算法, 图8(b)为基于Canny算子与形态学融合的算法。
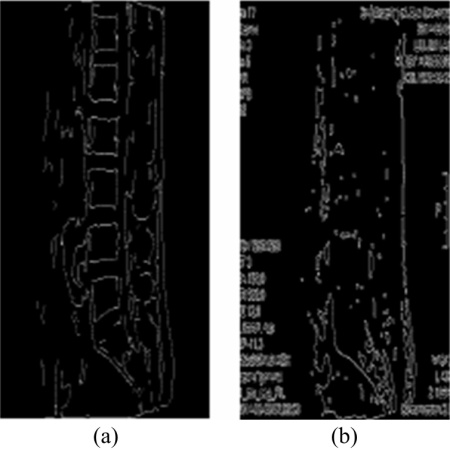 | 图8 与其他算法结果对比图Fig.8 Comparison of proposed algorithm with other algorithm |
通过对比可以看出, 通过基于Canny算子与形态学融合的算法处理过后的MR图像其边缘信息较少, 假边缘被抑制的同时, 真边缘也被一同抑制, 而本文算法在抑制假边缘的同时较多得保留了真边缘信息。
首先根据MR图像存在的灰度阶变化不明显的特点, 采用增强图像对比度和图像锐化对MR图像进行预处理。然后, 针对Canny算法中一维高斯滤波器存在的对噪声敏感的缺点, 提出了基于均值滤波器的Canny算法。试验结果表明, 先把原图像进行对比度增强, 然后运用基于均值滤波改进的Canny算法进行边缘检测是一种可行的算法。而且相比于传统算法, 改进后的算法在真实边缘检出率、算法复杂度相同的情况下, 假边缘的检出率降低90%。同时, 本文所改进的算法不仅可以运用于MR图像边缘的检测, 而且对于CT、X光图像等与MRI所成图像类似的医学图像, 通过恰当的参数设置, 也可以达到同样的检测效果。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|