








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于LabVIEW的瞬变电磁接收系统设计
[于生宝 , 苏发, 郑建波, 朱占山]
, 苏发, 郑建波, 朱占山]
, 苏发, 郑建波, 朱占山]
|
|


作者简介:于生宝(1963-),男,教授,博士生导师.研究方向:功率源技术及其应用.E-mail:yushengbao@jlu.edu.cn
针对瞬变电磁仪器晚期信噪比低、抗干扰能力差的问题,介绍了一种基于LabVIEW控制USB4432采集卡的瞬变电磁仪器接收系统。为了便于使用,系统采用GPS同步;针对晚期信号弱、噪声大的问题,采用低噪声放大器搭建了双路差分前置放大器电路,并利用UAF42设计了四阶低通滤波器压制高频噪声;为了提高系统的稳定性和功能可扩展性,利用图形化语言G语言编写系统上位机程序。测试结果表明,该系统具有工作稳定、噪声水平低的优点,可用于瞬变电磁信号的采集。
To overcome the problems of low Signal to Noise Ratio (SNR) and poor anti- interference ability of the transient electromagnetic instrument, a transient electromagnetic receiving system based on LabVIEW and USB4432 acquisition card. For the convenience of application, the system adopts GPS synchronization. To solve the problem of weak SNR during later measurement, a double-channel differential preamplifier circuit is built, which uses low noise amplifier. A fourth-order low-pass filter is also designed using UAF42 to suppress high-frequency noise. To improve the stability and expansibility of the system, a PC control procedure is programmed by Graphical Programming Language. Testing results show that the proposed system can work stably and has high SNR. It can be used to collect transient electromagnetic signal.
瞬变电磁法作为主要的地质探测手段, 被广泛应用于石油、金属矿等资源的探测中[1, 2]。传统的接收系统多采用DSP或ARM作为主控单元, 它们内部资源有限、研发周期较长、功能扩展性较差且稳定性较差。而在实际工作中, 仪器的稳定工作是保证测量数据有效的根本。另外, 在不同的工作环境中, 仪器的工作模式及所要测量的数据亦存在区别, 这就要求仪器要有较强稳定性和功能可扩展性。
鉴于上述原因, 本文提出了基于LabVIEW的瞬变电磁数据采集系统。通过G语言编程, 控制USB4432采集卡实现对被测数据以及同步信号的采集。同时编写数据同步截取模块和数据叠加模块以实现被测信号的同步叠加, 提高信噪比。另外, 为了进一步压制噪声, 设计了低噪声调理电路, 提高了接收系统对晚期瞬变电磁信号的检测能力。本系统可以充分利用计算机资源, 具有性价比高、功能可扩展能力强的优点[3]。
系统总体结构设计如图1所示, 主要包括软件和硬件两部分。硬件部分由同步通道和信号通道组成:在同步通道中, GPS模块定位成功后, 产生高精度(随机误差100 ns)1PPS信号, 可用于对FPGA产生的同步信号进行对钟, 从而产生高精度同步信号; 信号通道用于实现对被测信号的放大及高频噪声的压制。两种信号的采集由USB4432完成。软件部分主要由四部分组成:采集与储存模块通过USB数据总线与USB4432连接, 用于完成对采集卡工作参数及工作状态的控制, 并将接收的数据进行储存; 同步提取模块根据原始数据中的同步信号对被测信号进行同步分割, 提取有效数据; 通过叠加与显示模块, 对有效数据进行叠加, 给出并显示处理后的数据结果; GPS状态解析模块用于对GPS定位状态进行监视, 确定GPS是否定位有效, 由于两者逻辑电平不同, 故使用MAX232进行电平转换。
 | 图1 接收系统结构框图Fig.1 Structure diagram of receiving system |
调理电路总体采用差分放大+低通滤波的结构模式。通过前置两级低噪声差分放大, 抑制共模干扰, 实现被测信号的硬件叠加, 在放大信号的同时压制白噪声; 通过设计四阶低通滤波器去除高频噪声, 进一步提高信噪比。
2.1.1 前置放大器设计
图2给出了放大器连接到信号源的等效噪声电路图。由电路理论可知, 折算到放大器输入端的总噪声功率为:
式中:eRs、en、in分别为信号源内阻热噪声电压、放大器噪声电压及放大器噪声电流; Rs为信号源内阻。
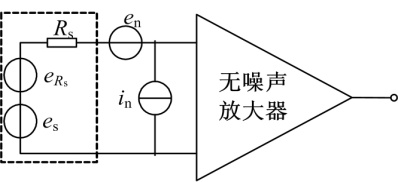 | 图2 放大器等效噪声电路图Fig.2 Diagram of amplifier equivalent noise circuit |
由式(1)可得, 当Rs较小时, 输入总噪声功率主要由内阻热噪声和放大器电压噪声构成[4]。因此, 考虑到接收线圈即信号源的内阻为几十欧, 应在兼顾电流噪声的情况下尽可能选择电压噪声低的运算放大器。AD797的等效输入电压噪声为0.9~1.2 nV/
在前置放大中, 电路采用两级差分放大的模式, 其电路图如图3所示。图中, 一级放大由两个差分放大器构成, 且二者处于并联运行状态。其中,
 | 图3 前置放大电路图Fig.3 Diagram of preamplifier circuit |
2.1.2 线圈匹配电阻的选择
图3中, RP为线圈的匹配电阻, 对于参数不同的接收线圈, 应对RP进行调整从而使线圈工作在临界阻尼状态[7]。图4给出了实用的线圈等效电路, 其中
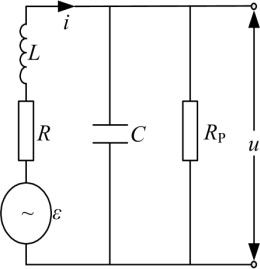 | 图4 线圈等效电路图Fig.4 Diagram of coil equivalent circuit |
假设电动势
根据KVL可得:
进而可得特征方程为:
当电路处于临界阻尼状态时, 对于式(4)中的参数应满足:
式(5)是关于RP的一元二次方程, 解此方程即可获得使线圈工作在临界阻尼状态的匹配电阻RP的值[9]。在实际工作中, 应使线圈工作于微过阻尼状态, 以防其受外界温度等因素影响落入欠阻尼状态而振荡[10]。
2.1.3 低通滤波器设计
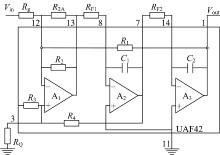
低通滤波器使用通用有源滤波器UAF42作为核心芯片, 利用两个UAF42级联的方式实现四阶有源低通滤波器设计。每级电路示意图如图5所示。作为通用有源滤波器, UAF42配有专门的仿真器, 可以在计算机中根据滤波器截止频率、响应类型等参数计算出所用各个电阻的阻值。
 | 图5 UAF42低通滤波器电路图Fig.5 UAF42 low-pass filter circuit diagram |
在实际工作中, 接收系统常处在移动中, 因此使用GPS同步较线同步更合理[11]。在本设计中, FPGA根据GPS模块提供的1PPS作为对钟信号, 产生2倍于发射波形频率的方波, 即同步信号。FPGA采用VHDL语言进行内部硬件逻辑设计, 其结构框图如图6所示。
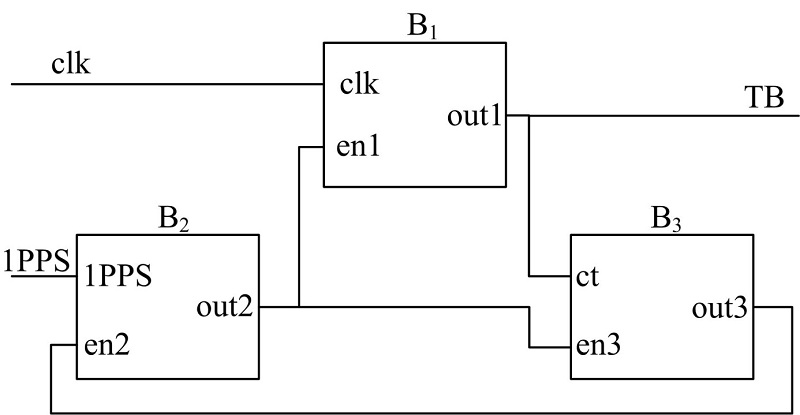 | 图6 FPGA逻辑结构图Fig.6 Logic structure of FPGA |
图6中, B1为分频单元, 在en1为高时, B1对clk进行分频, 确定同步信号的频率, 而en1为低时, 分频停止且out1置低; B2为触发器, 当en2为低时且1PPS上升沿来时, out2输出高电平, 而en2为高时, out2置低; B3为计数器, 当en3为高时, B3会对ct脚检测的下降沿计数, 达到阈值时, out3输出为高电平, 而当en3为低时, out3置高。输入输出时序图如图7所示, 图中同步信号频率为6.25 Hz。
 | 图7 输入输出时序图Fig.7 Sequence diagram of input and output |
在LabVIEW软件中, 前面板与后台的框图程序同时进行编写, 前面板用于程序入口和出口参数以及波形的显示[12]; 框图程序由节点VI通过数据线连线构成, 节点VI为程序执行元素[13], 用于实现对数据的操作, LabVIEW程序以数据流的模式运行, 相关VI间通过数据线进行数据传输。
本系统软件主要包括采集和数据处理两部分。在采集部分中, 采集与储存模块用于控制对被测信号和同步信号的采集, 并将数据储存在相关文件中; GPS状态解析模块用于监视并记录GPS定位状态, 确定是否同步。在数据处理部分中, 同步提取模块根据同步信号对被测信号中的有效数据进行截取, 最后经由叠加与显示模块进行显示。
3.1.1 GPS状态解析模块设计
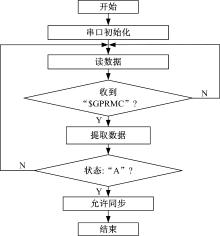
GPS模块的信息以串口总线的方式输出, 其数据格式为NMEA0183, 其中, 以“ $GPRMC” 开头的数据包含了GPS定位状态信息[14]。因此, 该模块软件主要使用VISA选板中的VI进行编程。具体软件流程图如图8所示。
 | 图8 GPS状态解析模块软件流程图Fig.8 Software diagram of GPS data parsing |
利用“ VISA打开” 和“ VISA配置串口” 可实现串口的初始化, 通过“ VISA读取” 完成对GPS数据的读取, 将读到的数据通过数据线传递给“ 搜索/拆分字符串” VI以提取“ $GPRMC” 语句, 最后利用“ 截取字符串” VI即可完成对定位状态的获取。
3.1.2 采集与储存模块设计
由于本系统使用的采集卡为NI公司的USB4432采集卡, 故可以直接调用数据采集选板中的VI进行控制程序的编写。
利用“ DAQmx创建虚拟通道” , “ DAQmx定时” , “ DAQmx配置记录” 三个VI, 可实现对测量通道、采样率和文件存储位置的配置。将“ DAQ写入” 放置在while循环框图中, 通过其连续运行来完成对被测信号和同步信号的连续采集。在数据采集阶段, 采集到的数据以TDMS格式进行储存。它是一种二进制记录文件, 兼顾了高速、易存取的优势, 能够与LabVIEW中的数据分析VI无缝交互[14]。通过该格式, 本系统将多通道采集到的数据存入同一文件中, 并包含采样率、绝对时间等信息, 便于后期的软件处理。
3.2.1 同步提取模块设计
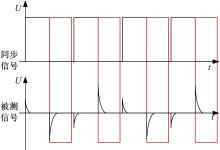
在瞬变电磁法的使用中, 有效数据为一次场消失后的二次场数据, 由于本系统为连续采样, 包含有一次场数据, 故设计同步提取模块, 从采集到的信号中提取二次场数据。图9给出了采集的同步信号与被测信号的对应关系示意图, 其中红框中的数据为有效的二次场数据(发射波形为双极性方波)。
 | 图9 同步信号与被测信号示意图Fig.9 Diagram of Synchronizing signal and the measured signal |
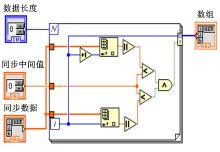
由于采集到的数据存储在TDMS文件中, 故使用“ TDMS打开” 和“ TDMS读取” 两个VI完成波形文件的读取。通过设定“ TDMS读取” VI的入口参数, 可选择性读取同步信号通道的数据。将读取到的同步信号送入“ 偏移量获取” 子VI, 即可获得每个同步下降沿在TDMS文件中的偏移量。其中“ 偏移量获取” 子VI程序如图10所示, 其入口参数包括同步数据长度(确定循环的次数), 同步中间值(为同步信号高低电平的平均值)和同步数据。
 | 图10 偏移量获取子VI程序Fig.10 Sub VI program for offset acquisition |
在图10的For循环中,
3.2.2 叠加与显示模块设计
测量得到的二次场数据内含有较大的噪声, 通过多次数据叠加的方式可有效压制噪声, 提高信噪比[15]。由图6可知, 接收到的二次场信号有正向和反向之分, 故在进行数据叠加时应先对信号的方向进行选择变换:对于正向信号, 可直接叠加, 而对于反向信号, 应先取反再叠加。可利用“ 索引数组” VI和条件结构实现对正向和反向信号的判断和处理, 如图11所示。索引出数据中靠前的元素, 当其小于0, 说明为反向数据, 对其取反; 当大于0时, 为正向数据, 不进行操作。
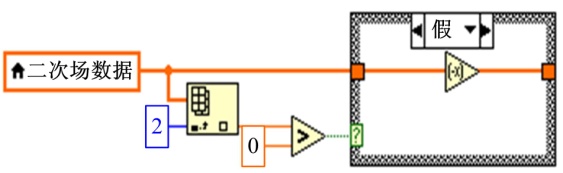 | 图11 正反信号处理程序Fig.11 Processing program of positive and negative signals |
对于调整后的数据进行加和取平均, 即可得到叠加后的二次场数据。利用“ 创建波形” VI, 设置采样时间dt和起始时间t0, 即可得到叠加后的二次场波形, 将其送入“ 波形图” VI中即可完成显示。
通过MATLAB对调理电路进行了仿真测试, 结果如图12所示。图中, 蓝线为单通道差分放大结果, 红线为两通道差分放大结果。可以看出, 两通道差分放大较单通道信噪比更高, 验证了两通道差分放大电路的效果。
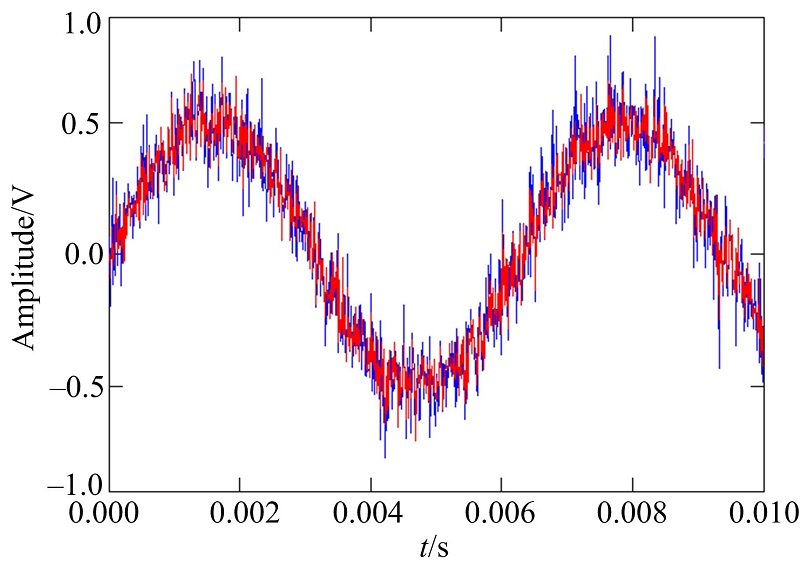 | 图12 调理电路仿真结果Fig.12 Conditioning circuit simulation results |
使用Multisim软件对两种电路进行仿真, 通过噪声分析发现, 在相同噪声源、放大倍数(500)以及频带宽度(50 kHz)的情况下, 由差分放大+比例放大的单通道放大电路的输出总噪声为258.2 nV/
图13给出了调理电路短路噪声频谱, 其中, 电路总体放大倍数为500倍。可见, 本调理电路除引入直流偏置外, 其他频率噪声皆低于-100 dB。在实际应用中, 该直流偏置不随工作频率的变化而变化, 可通过正反方向的信号叠加去除, 因此设计可以满足使用要求。
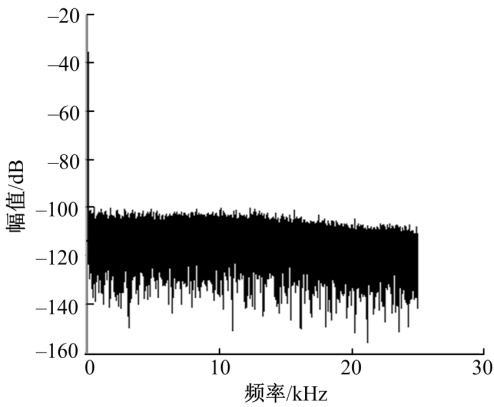 | 图13 调理电路短路噪声频谱Fig.13 Noise spectrum of conditioning circuit short circuit |
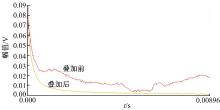
图14给出了某一测点的有效实测结果, 图中红线为未叠加的二次场晚期衰减曲线, 黄线为叠加20次后取平均的晚期衰减曲线, 可以看出, 叠加后的晚期衰减曲线信噪比明显提高, 可用于后期的成像及反演处理。另外, 在叠加后的衰减曲线中直流偏置明显消失, 进一步证明了调理电路的实用性。
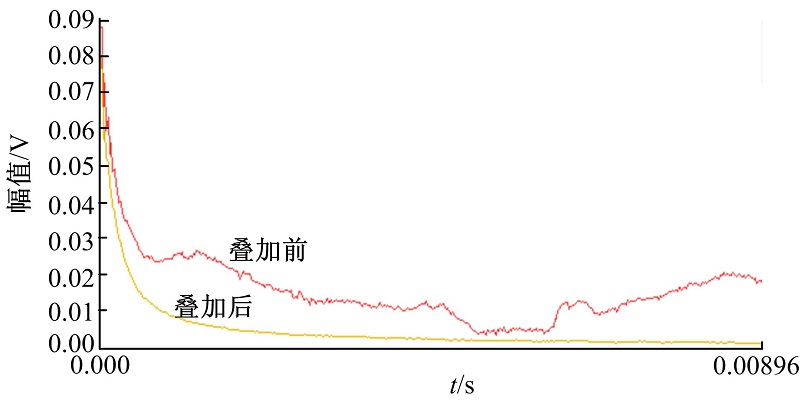 | 图14 实测数据叠加前后对比Fig.14 Contrast of measured data before superposition and after |
设计了一种基于LabVIEW的瞬变电磁接收系统。系统采用GPS同步方式, 使用图形化G语言设计上位机主控单元, 通过控制USB4432采集卡实现了对被测信号和同步信号的高精度采集。为了提高信噪比, 在硬件上设计了低噪声信号调理电路, 实现了对信号的低噪声放大以及高频噪声的压制; 在软件上设计了叠加程序进一步压制晚期信号中的噪声。本系统采用虚拟仪器进行设计, 提高了设计效率, 降低了设计成本, 保证了系统的稳定性和功能扩展性。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|