

{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于鲁棒 L2 -L∞/H∞的车辆底盘集成控制
[李静1  , 张家旭
, 张家旭1, 2 ]
, 张家旭|
|


作者简介:李静(1974-),男,教授,博士生导师.研究方向:汽车地面力分析与控制.E-mail:liye1129@163.com
基于连续时间系统的鲁棒 L2 -L∞及 H∞性能判据,推导出新的状态反馈的鲁棒 L2 -L∞/H∞控制方法,并将其转化为具有较低保守性的线性矩阵不等式组的凸优化问题。利用该方法设计车辆底盘集成控制策略,协调控制主动前轮转向系统和主动悬架系统。采用Matlab/Simulink与Carsim联合仿真对典型工况进行验证,结果表明:所设计的车辆底盘集成 L2 -L∞/H∞控制器在车辆极限条件下具有良好的协调控制性能,能够有效提高车辆的稳定性和防侧翻能力。
Based on robust L2 -L∞/H∞ performance criteria for continuous time system, a new approach to design robust L2 -L∞/H∞ controller was proposed, which was then transformed into convex optimal problem with constrains of linear matrix inequalities with low conservative. Using this method, the vehicle chassis integrated control strategy was developed to coordinate active front wheel steering system and active suspension system. Typical cases were simulated using Matlab/Simulink and Carsim. Results show that the robust L2 -L∞/H∞ controller for vehicle chassis integrated system has good control effect, and can significantly improve the stability of the travelling direction and anti-rollover capability of the vehicle.
随着车辆主动安全性能要求的不断提高和底盘电控系统数量的增多, 采用底盘集成控制方式实现车辆的行驶方向稳定性和防侧翻能力受到了更多的关注[1, 2]。例如:Nagai等[3]采用主动后轮转向系统和直接横摆力矩系统的集成控制方式实现了车辆的行驶方向稳定性。Ali等[4]采用主动前轮转向系统和直接横摆力矩系统的集成控制方式实现了车辆的行驶方向稳定性。万都公司采用直接横摆力矩系统和主动悬架系统集成控制的方式来提高车辆的防侧翻能力[5]。Odenthal等[6]采用主动转向和主动制动协调控制方式防止车辆发生侧翻。上述方法仅仅从车辆行驶方向稳定性或防侧翻能力单一的角度进行控制。然而, 车辆处于极限危险工况时, 车辆失稳和侧翻情况均可发生。因此, 以综合实现车辆的操纵稳定性和防侧翻能力为目标的车辆底盘子系统集成控制成为研究的热点。
鲁棒L2-L∞ /H∞ 控制采用简化的标称模型可有效地分析控制性能。传统的基于二次稳定的鲁棒L2-L∞ /H∞ 控制方法要求对于L2-L∞ 性能和H∞ 性能的线性矩阵不等式(Linear Matrix Inequality, LMI)约束条件采用同一个李雅普诺夫函数, 导致设计结果具有较大的保守性[7]。本文在文献[8, 9]的基础上, 推导出采用两个独立的李雅普诺夫函数作为L2-L∞ /H∞ 控制问题的LMI约束条件, 从而降低了设计的保守性。利用该方法, 对车辆的主动前轮转向系统和主动悬架系统进行集成控制, 从而实现同时提高车辆操纵稳定性和防侧翻能力的控制目标。采用Matlab/Simlink与Carsim联合仿真的方式, 并选取典型工况验证了所设计的车辆底盘集成L2-L∞ /H∞ 控制器的性能。
连续系统的状态空间描述如下:
式中:x
设计状态反馈控制器u
式中:
对于系统(1), 所设计的鲁棒L2-L∞ /H∞ 状态反馈控制器需要满足如下要求:
(1)闭环系统(2)是渐近稳定的;
(2)对于γ 2> 0, 使L2-L∞ 性能指标满足:
(3)存在最小的扰动抑制度γ 1> 0, 使
为了计算方便, 将上述控制问题转化为线性不等式组的凸优化问题进行求解。
引理1[8] 考虑闭环系统(2), γ 1> 0, 则下列条件等价:
(1)闭环系统(2)是渐近稳定且满足性能指标(7);
(2)存在正定对称矩阵X和实矩阵G1, 使得不等式(8)成立。
式中:“ * ” 表示由矩阵的对称性得到的矩阵块。
引理2[9] 考虑闭环系统(2), γ 2> 0, 则下列条件等价:
(1)闭环系统(2)是渐近稳定且满足性能指标(6);
(2)存在正定对称矩阵X2和实矩阵G2, 使得不等式(9)(10)成立。
定理1 考虑系统(1), 给定γ 1> 0, γ 2> 0, 则闭环系统(2)是渐近稳定, 且满足性能指标(6)和性能指标(7), 其充分条件为存在正定对称矩阵P1、P2和矩阵G、W, 同时满足:
式中:M=AG+B1W+P1; N=
式中:M'=AG+B1W+P2; N'=C2G+D2W。 证明 给定γ 1> 0, γ 2> 0, 则闭环系统(2)是渐近稳定, 且满足式(6)(7)的充分条件是同时满足引理1和引理2。因此, 只需证明式(8)(9)(10)分别与式(11)(12)(13)等价即可。将式(3)(4)(5)代入式(8)(9)(10)得:
式中:R=
式中:R'=
考虑G1为可逆矩阵, 通过J=diag
式中:F=
考虑G2为可逆矩阵, 通过J=
式中:F'=
通过J=
将G=
定理2 通过引入松弛变量G, 实现了李雅普诺夫函数与系统矩阵之间的解耦, 且采用不同的李雅普诺夫函数来描述系统的L2-L∞ 和H∞ 性能指标, 从而降低了控制器设计的保守性。
推论1 对于给定的γ 2> 0, 若式(20)有解, 则系统(1)的最优鲁棒L2-L∞ /H∞ 控制器存在, 且鲁棒H∞ 性能的上确界为γ 1。
基于状态反馈的车辆底盘集成L2-L∞ /H∞ 鲁棒控制系统总体结构如图1所示。图1中, γ 为横摆角速度; β 为质心侧偏角; φ 为侧倾角; v为车辆的纵向车速; δ f为驾驶员操作产生的前轮转向角; Δ δ f为主动前轮转向系统产生的前轮转向角; Δ Fdr、Δ Fdl分别为车辆主动悬架系统左、右输出作用力。
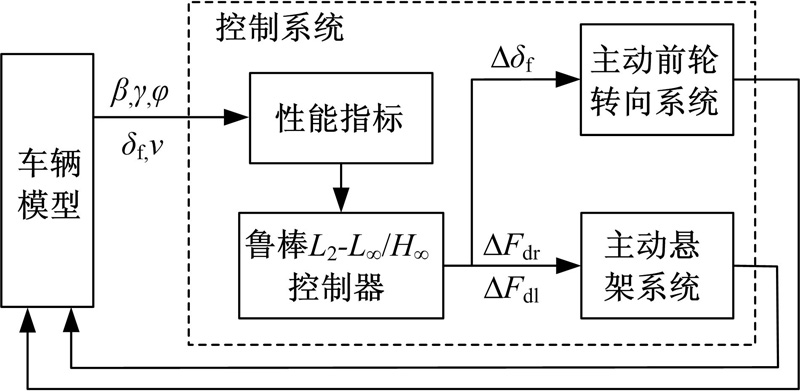 | 图1 系统总体结构图Fig.1 Overall structure diagram of system |
该控制系统根据车辆的状态信息实时计算车辆期望的性能指标要求, 并基于此性能指标和车辆执行结构的输出约束来协调主动前轮转向系统和主动悬架系统, 以提高车辆的行驶方向稳定性和防侧翻能力。
本文采用线性三自由度车辆动力学模型作为控制器设计的标称模型, 该模型包括侧向运动、横摆运动和侧倾运动, 如图2所示。建立车辆的力和力矩平衡方程分别如式(21)和(22)所示:
式中:m为车辆质量; Iz、Ix分别为车辆绕垂直轴和侧倾轴的转动惯量; Fy1、Fy2分别为车辆前、后轴侧向力; T为车辆的轮距; k为悬架的侧倾角刚度; c为悬架的侧倾角阻尼; a、b分别为车辆的重心至前、后轴距离; δ 1=δ f+Δ δ f为车辆的前轮转角; h为车辆重心到侧倾中心距离; ms为簧载质量; Δ Fdr、Δ Fdl分别为车辆左、右主动悬架输出作用力。
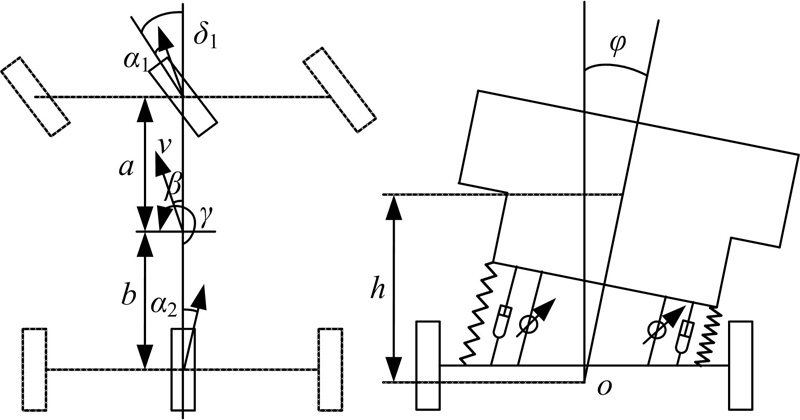 | 图2 车辆参考模型Fig.2 Vehicle reference model |
忽略轮胎侧向力的非线性, 车辆前、后轴的侧向力与其对应的侧偏角呈线性关系, 即:
式中:k1、k2分别为车辆前、后轴侧偏刚度; α 1、α 2分别为车辆前、后轴侧偏角。
选取x=
式中:
研究发现[10]:当车辆质心侧偏角超过某个值时, 轮胎侧偏刚度将随着轮胎侧偏角的变大而急剧减小并趋向零值。因此, 对车辆质心侧偏角约束如下:
对主动前轮转角约束如下:
|Δ δ f|< Δ δ max
对主动悬架作用力约束如下:
车辆的横向载荷转移率定义为[11]:
式中:Fzr、Fzl分别为作用于车辆左侧和右侧轮胎的垂向力。
当
式中:车辆的横向载荷转移率Rd可以用车辆状态及参数描述如下[12]:
式(26)约束可描述如下:
根据以上要求定义系统的约束输出为:
L2-L∞ 性能指标能够保证从扰动输入到约束输出的增益小于给定值, 因此用L2-L∞ 性能指标来评价约束输出。
车辆行驶方向稳定性通过质心侧偏角和横摆角速度来反映, 在质心侧偏角满足约束条件(25)下, 要求车辆横摆角速度可以较好地跟踪其期望值, 故性能输出为:
式中:车辆的期望横摆角速度定义为[13]:
式中:K0为稳定性系数; μ 为路面附着系数。
H∞ 范数能够描述从能量有界扰动到性能输出峰值间的关系, 故将该性能输出的H∞ 范数作为最优性能指标。
考虑系统的性能指标式(27)(28), 选取x=
式中:
B22=
C1=
D1=
C2=
D2=
对于式(29)描述的系统可基于推论1的凸优化运算得到鲁棒L2-L∞ /H∞ 最优状态反馈控制律。
考虑车辆前、后悬架静态轴荷分配比例, 得到主动悬架输出作用力如下:
式中:Δ Fdlf、Δ Fdlr、Δ Fdrf和Δ Fdrr分别为车辆左前、左后、右前和右后主动悬架输出作用力。
在Matlab/Simulink环境下构建车辆底盘集成鲁棒L2-L∞ /H∞ 控制器, 并通过与Carsim软件联合仿真对所设计控制器进行验证。采用典型试验工况, 对比有、无底盘集成控制的车辆在极限条件下的操纵稳定性和防侧翻能力。
车辆以80 km/h速度直线行驶; 路面附着系统设置为0.8; 加速踏板开度设置为0; 前轮转角输入幅值为8° ; 频率为0.7 Hz; 延迟时间为500 ms的正弦信号[14], 仿真结果如图3所示。
由图3(a)(b)(c)可见, 车辆无控制时, 其质心侧偏角在1.5 s之后逐渐变大, 从而导致作用于车辆横摆力矩对方向盘转角的敏感性迅速降低, 致使其横摆角速度在2.2~2.5 s对前轮转角的动作无响应, 明显偏离其期望值, 车辆丧失方向稳定性。由图3(d)(e)可见, 在无控制时, 车辆侧倾角较大, 在2.2~2.5 s对方向盘转角的动作亦无响应, 车辆侧倾角速度较大, 且在1.5~2.5 s呈现衰减震荡, 车辆易发生侧翻。
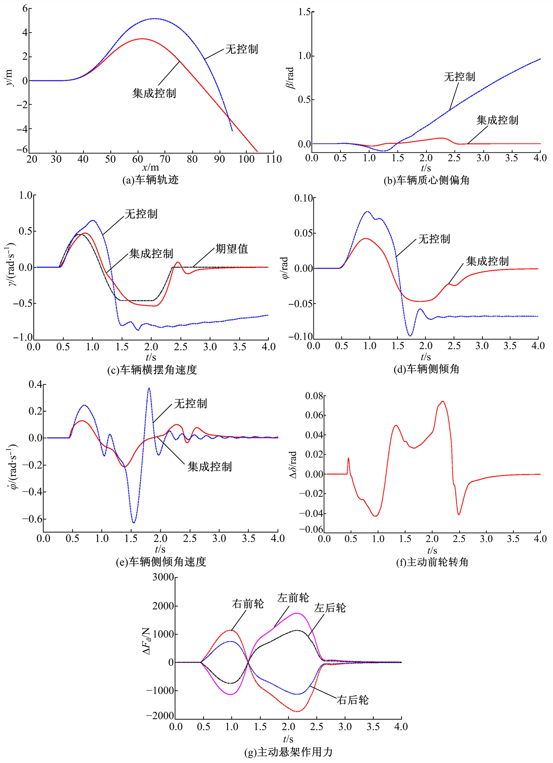 | 图3 正弦延迟工况的仿真结果Fig.3 Simulation results of sine with dwell maneuver |
采用底盘集成控制后, 在车辆状态偏离控制目标时, 系统可通过协调主动前轮转向系统调整轮胎侧偏角来产生附件的轮胎侧偏力, 同时系统可通过协调主动悬架系统调整车身与轮胎之间的相互作用力来控制车身的姿态和轮胎的垂向力, 二者控制输出如图3(f)(g)所示。由图3(a)~图3(e)可见, 通过对主动前轮转向系统和主动悬架系统的集成控制, 车辆的质心侧偏角被控制在较小的范围内, 横摆角速度可以较好地跟踪其期望值, 并且车辆侧倾角和车辆侧倾角速度可以控制在防止车辆发生侧翻的范围内。
车辆以80 km/h的速度直线行驶; 路面附着系数设置为0.8; 加速踏板开度设置为0; 车辆前轮转角按照1000 (° )/s的速度转动10° , 保持4 s, 之后用2 s的时间匀速回到0° 位置[15], 仿真结果如图4所示。
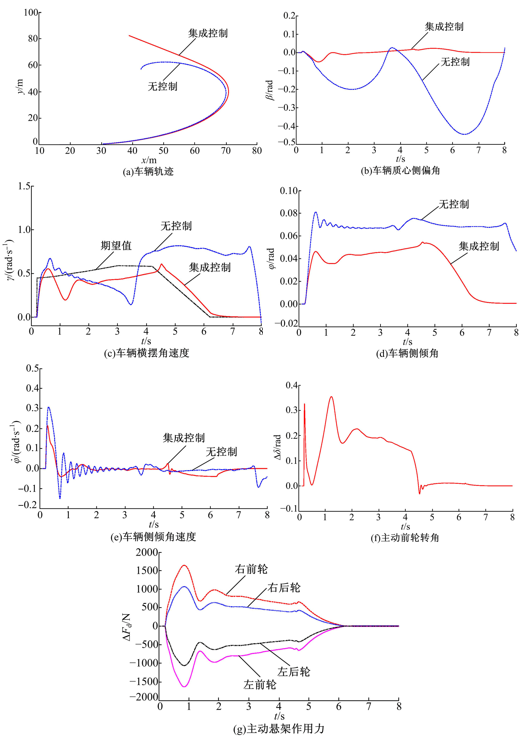 | 图4 J-turn工况的仿真结果Fig.4 Simulation results of J-turn maneuver |
由图4(a)(b)(c)可见, 车辆无控制时, 其质心侧偏角逐渐增大且呈现缓慢振荡, 作用于车辆的横摆力矩对方向盘转角的敏感性迅速降低, 致使车辆横摆角速度在4 s后对方向盘转角的动作无响应, 从而使车辆丧失方向稳定性。采用底盘集成控制后, 车辆的质心侧偏角和横摆角速度均控制在要求范围内。同时, 车辆无控制时, 其侧倾角和侧倾角速度明显增大, 从而增加车辆发生侧翻的风险。
(1)基于连续时间系统的鲁棒L2-L∞ 及H∞ 性能判据, 推导出新的状态反馈的鲁棒L2-L∞ /H∞ 综合控制方法, 并将其转化为线性矩阵不等式组的凸优化问题, 降低了系统保守性。
(2)基于推导出的鲁棒L2-L∞ /H∞ 控制方法设计了车辆底盘集成控制策略, 充分考虑系统多种约束条件, 实现了主动前轮转向系统和主动悬架系统的协调控制。
(3)正弦延迟工况和J-turn工况仿真结果表明, 所设计的车辆底盘集成控制器在车辆极限条件下具有良好的协调控制性能, 可以有效地提高车辆的操纵稳定性和防侧翻能力。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|