
{kind=link}
{kind=link}
{kind=link}
{kind=link}
行人斜穿信号交叉口绿波设计及延误模型
[卢凯1, 2  , 胡建伟
, 胡建伟1 , 李福樑1 , 张孜3 , 徐建闽1, 2 ]
, 胡建伟|
|


作者简介:卢凯(1979-),男,副教授,博士.研究方向:交通信号控制.E-mail:kailu@scut.edu.cn
针对行人斜穿信号交叉口的实际过街需求,利用时距图分析了不同信号相位相序设置和行人过街组织方案的运行效果,提出了行人连续横穿信号交叉口的绿波带设计方式。根据行人到达和离开位置点的时刻线,推导了行人沿顺时针、逆时针以及不固定方向连续过街的延误模型,建立了总的行人连续过街延误模型通式。算例分析和仿真试验结果表明:本文提出的行人连续过街延误模型能够准确计算行人斜穿信号交叉口的延误时间,获取最佳的信号相位相序和行人过街组织方案,从而实现了行人连续过街的绿波通行,减少了行人连续过街的延误时间。
Considering the real demand for pedestrian diagonal crossing at signal intersection, the operation effects of different signal phase settings and pedestrian crossing organization schemes were analyzed using the time-space diagram. Then, a design approach of pedestrian green wave for continuously crossing signalized intersection was proposed. According to the pedestrian arrival and departure time, the delay model of pedestrian continuous crossing along the clockwise, counterclockwise and unfixed directions were deduced. Finally, the general delay model for pedestrian continuous crossing was established. The results of case study and simulation show that the general delay model can predict the delay of pedestrian diagonal crossing accurately. This model can also help to acquire the best signal phase sequence and pedestrian crossing organization scheme. Therefore, the green wave can be obtained and the delay of the pedestrian diagonal crossing can be reduced.
由于受到城市功能区域及基础设施布局(例如在交叉口两端呈对角分布的公交站和写字楼、居民住宅区和商场超市、对向公交站台)等因素影响, 可能会产生一定量的行人斜穿信号交叉口的实际过街需求。对此, 可以利用直角人行横道, 通过设置两个相应的信号相位, 满足行人的斜穿需要; 也可以设置对角人行横道, 使用一个独立的行人相位, 直接满足行人的斜穿需要。相比而言, 设置对角人行横道可以减少行人过街的行走距离, 缩短行人过街时间, 一次性完成行人的斜穿过程, 但需要设置独立的行人相位, 且相位时间要求较长, 从而将加大交叉口的信号周期, 增加机动车辆的延误时间, 该方法主要适用于面积较小、车流量不大、行人流量较大的信号交叉口; 而直角人行横道适用范围更广、灵活性更高, 可适用于绝大部分的交叉口, 但其施划位置及信号相位应根据行人过街需求分布进行合理设置[1], 以避免行人因为过街等待时间过长而选择违章过街[2]。因此, 如何针对行人斜穿信号交叉口的实际过街需求, 研究交叉口的行人过街方案和信号相位设计具有重要意义。
针对行人过街延误国内外学者开展了广泛研究。Golani等[3]综合考虑行人的起步时间、步行速度、行人间距等影响因素, 建立了高占用率人行横道的行人通行时间估算模型。Alhajyaseen等[4]提出了一种针对不同行人需求组合和预定服务水平的人行横道宽度估算方法。Goldschmidt[5]对行人过街延误与交通布局特点之间的关系展开研究, 分析了交通流量、道路宽度、信号配时、人群组成等因素对行人过街延误的影响。Virkler[6]考虑行人过街的行为心理对信号交叉口的行人延误公式进行了修正。美国的通行能力手册[7]和日本的交通信号控制手册[8]都建立了相应的行人过街时间计算公式。冯树民等[9, 10]研究了无干扰情况下的信号交叉口行人过街平均延误计算方法, 建立了考虑行人过街的交叉口信号配时优化模型。高利平[11]分析了不同行人过街方式下的信号交叉口行人过街延误情况, 建立了信号交叉口基于过街方式的行人延误模型。钱大琳等[12]针对道路等级相差较大的两相位信号交叉口, 建立了基于行人专用相位的行人过街延误计算模型和交叉口信号配时优化模型。马万经等[13]研究了行人相位与机动车相位的组合设置问题, 提出了多相位信号控制交叉口行人相位的设计方法。赵韩涛等[14]推导了行人过街时间函数, 建立了具有行人专用相位的过街时间模型。孙迪[15]针对过街双向行人之间互相干扰的特点, 建立了对向行人干扰情况下的过街延误模型。然而, 目前关于行人连续横穿信号交叉口的优化设计和延误分析很少, 也鲜有如何结合信号交叉口的相位相序和行人过街组织形式进行一体化设计的相关理论研究。
对此, 本文针对行人斜穿信号交叉口的过街需求, 引入时距图分析方法, 提出行人斜穿信号交叉口的绿波带设计理念, 并利用行人到达和离开人行横道的时刻线, 推导行人连续横穿信号交叉口的过街延误模型, 为信号交叉口的行人连续过街设计和引导策略制定提供了理论依据。
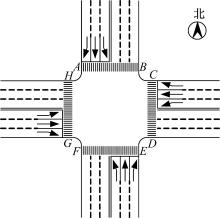
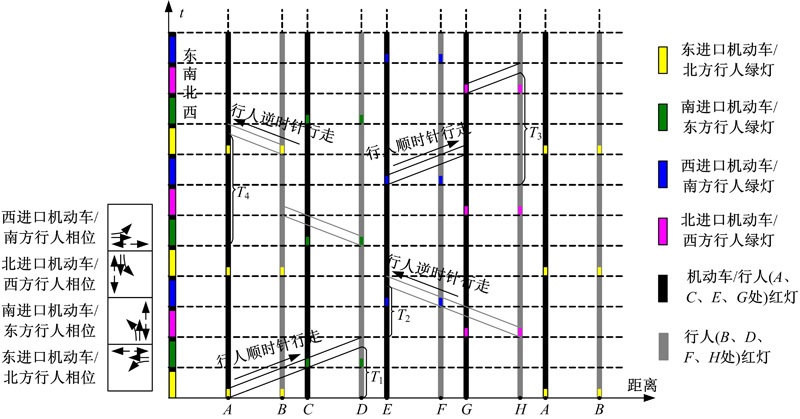
以图1所示的一个几何对称交叉口为例, 假设位置点A、B、C、D、E、F、G、H分别为北、东、南、西4个进口的人行横道起止点, 交叉口各进口均采用一次过街方式进行行人交通组织和相位设计(行人和机动车合用信号相位), 右转车流避让过街行人或者通过信号控制与相关行人通行相位分离。
 | 图1 交叉口行人过街位置Fig.1 Positions of pedestrian crossing at intersection |
为了便于理解和分析行人连续过街的绿波设计, 在此先假设该交叉口采用进口单独放行方式。当该交叉口采用顺时针的进口单独放行相位设计, 即信号相序为东进口机动车/北方行人相位→ 南进口机动车/东方行人相位→ 西进口机动车/南方行人相位→ 北进口机动车/西方行人相位(简称东南西北), 所有需要斜穿信号交叉口的行人, 例如从位置点A(H)到D(E)、从位置点C(B)到F(G)、从位置点E(D)到H(A)、从位置点G(F)到B(C), 按顺时针方向行走均可实现绿波通行, 其通行时间为T1, 而按逆时针方向行走则无法实现绿波通行, 其通行时间为T2(T2远大于T1), 如图2所示。
同样, 当该交叉口采用逆时针的进口单独放行相位设计, 所有需要斜穿信号交叉口的行人按逆时针方向行走均可实现绿波通行, 而按顺时针方向行走则无法实现绿波通行。
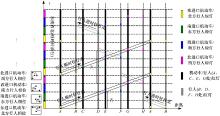
当以A(H)→ D(E)方向的行人过街需求为主时, 该交叉口的最佳相位相序设置为东南北西, 此时可为A(H)→ D(E)方向的过街行人在顺时针(A→ D)和逆时针(H→ E)两个方向上各形成一条行人绿波带, 其通行时间T1与T2近似相等且较小, 而对于其他方向(例如E(D)→ H(A)方向)的行人连续过街需求, 过街行人在顺时针(E→ H)和逆时针(D→ A)两个方向上均无法实现绿波通行, 其通行时间T3与T4近似相等且较大(T3和T4远大于T1和T2), 如图3所示。
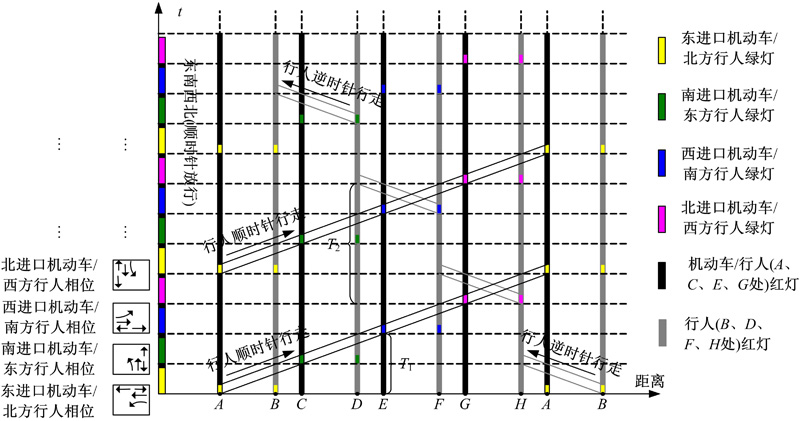 | 图2 顺时针单放情况下的行人绿波带设计Fig.2 Design of pedestrian green wave in the case of one-phase-one-approach clockwise |
 | 图3 满足A(H)→ D(E)方向行人过街需求的行人绿波带设计Fig.3 Design of pedestrian green wave to meet the pedestrian crossing demand from A(H)to D(E) |
同理, 当以E(D)→ H(A)方向的行人过街需求为主时, 该交叉口的最佳相位相序设置为南东西北, 此时可为E(D)→ H(A)方向的过街行人在顺时针(E→ H)和逆时针(D→ A)两个方向上各形成一条行人绿波带, 而对于其他方向(例如A(H)→ D(E)方向)的行人连续过街需求, 过街行人在顺时针(A→ D)和逆时针(H→ E)两个方向上均无法实现绿波通行。因此, 根据行人斜穿信号交叉口的交通需求, 可以利用行人时距图确定交叉口的最佳信号相位相序设置和行人过街组织方案, 实现行人连续横穿信号交叉口的绿波带设计。但由于交叉口的信号相位设计通常需要考虑进口道机动车放行以及干道车队协调控制[16]的要求, 且行人在交叉口处总的延误时间还应包括其第一次过街前的等待时间, 因此需要进一步建立行人连续过街的延误模型, 以便于量化分析不同信号相位相序设置和行人过街组织方案的优劣。
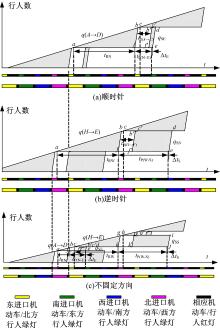
仍以图1所示的交叉口渠化为例, 假设该交叉口采用顺时针的进口单独放行相位设计, 针对由位置点A(H)至位置点D(E)的行人过街需求, 分析行人沿顺时针、逆时针以及不固定方向(根据先放行方向选择绕行方向)过街时的延误情况, 如图4所示。
为了避免过街行人与下一相位机动车辆发生冲突, 行人从位置点A(H)到位置点B(G)的步行时间t0(A→ B)(t0(H→ G))与北(西)进口的行人绿灯时间tGN(tGW)和行人通行相位时间tPN(tPW)应满足tPN≥ t0(A→ B)+tGN(tPW≥ t0(H→ G)+tGW)。
假设A(H)→ D(E)方向连续过街行人达到率为q(A→ D)(q(H→ E)), q(A→ D)=q(H→ E), 信号周期时长为C, 交叉口行人驻足区面积较小, 连续过街行人能够在相位时间tPN(tPW)内从位置点A(H)步行至位置点C(F), 即tPN≥ t0(A→ B)+t0(B→ C)=t0(A→ C)(tPW≥ t0(H→ F))。以图4中的第2个信号周期为例, 分析不同行走方向下的行人延误情况如下所示。
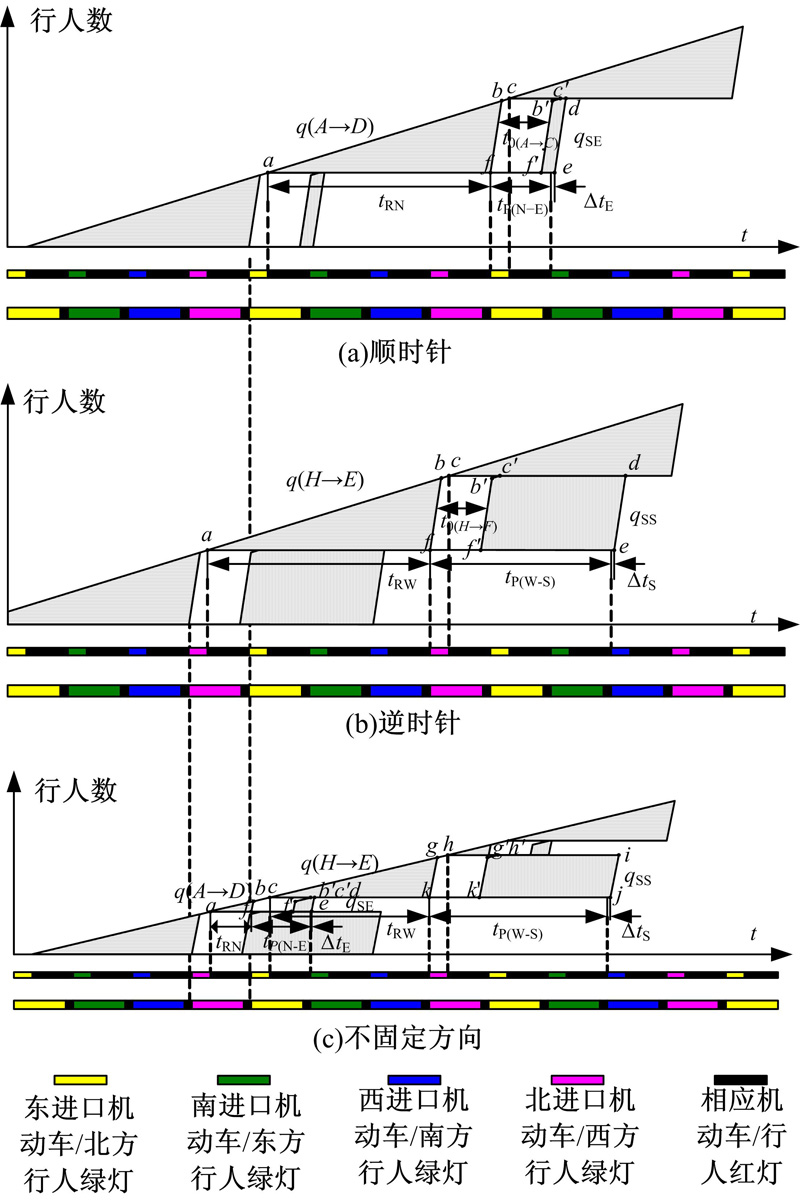 | 图4 行人连续过街延误分析Fig.4 Delay analysis of pedestrian continuous crossing |
(1)顺时针方向
在图4(a)中, 直线段abc表示行人到达位置点A的时刻; 折线段fbc表示行人离开位置点A走向位置点B的时刻; 折线段f'b'c'表示行人到达位置点C的时刻; 直线段ed表示行人离开位置点C走向位置点D的时刻; 三角形abf中的水平线段长表示行人在北进口等待绿灯的延误时间dN; 多边形fbcc'b'f'中的水平线段长表示行人从位置点A到位置点C的步行时间t0(A→ C); 多边形f'b'c'de中的水平线段长表示行人在东进口等待绿灯的延误时间dE; 梯形acde中的水平线段长表示行人从到达位置点A到离开位置C的时间差, 等于其步行时间t0(A→ C)与延误时间dN、dE之和; 三角形abf的面积为行人在北进口等待绿灯的总延误时间; 多边形f'b'c'de的面积为行人在东进口等待绿灯的总延误时间, 两块阴影面积之和为行人顺时针过街的总延误时间D(N-E); tRN为北进口的累积行人红灯时间, tRN=C-tGN; tP(N-E)为北进口与东进口的行人绿灯启亮时间差, tP(N-E)=tPN; Δ tE为东进口的初始行人清空时间; qSE为东进口人行横道的最大通行能力。
计算行人顺时针过街的总延误时间D(N-E), 如式(1)所示:
得到行人顺时针过街的平均延误时间
(2)逆时针方向
在图4(b)中, 直线段abc表示行人到达位置点H的时刻; 折线段fbc表示行人离开位置点H走向位置点G的时刻; 折线段f'b'c'表示行人到达位置点F的时刻; 直线段ed表示行人离开位置点F走向位置点E的时刻; 三角形abf中的水平线段长表示行人在西进口等待绿灯的延误时间dW; 多边形fbcc'b'f'中的水平线段长表示行人从位置点H到位置点F的步行时间t0(H→ F); 多边形f'b'c'de中的水平线段长表示行人在南进口等待绿灯的延误时间dS; 梯形acde中的水平线段长表示行人从到达位置点H到离开位置点F的时间差, 等于其步行时间t0(H→ F)与延误时间dW、dS之和; 三角形abf的面积为行人在西进口等待绿灯的总延误时间; 多边形f'b'c'de的面积为行人在南进口等待绿灯的总延误时间, 两块阴影面积之和为行人逆时针过街的总延误时间D(W-S); tRW为西进口的累积行人红灯时间, tRW=C-tGW; tP(W-S)为西进口与南进口的行人绿灯启亮时间差; tP(W-S)=tPW+tPN+tPE; Δ tS为南进口的初始行人清空时间; qSS为南进口人行横道的最大通行能力。
计算行人逆时针过街的总延误时间D(W-S), 如式(3)所示:
得到行人逆时针过街的平均延误时间
(3)不固定方向
行人将选择最近的行人通行相位完成第一次过街, 随后等待第二次过街通行相位完成穿越, 此时过街行人将分成两部分, 分别沿顺时针和逆时针两个方向过街。与情形(1)(2)类似, 在图4(c)中, 直线段abc表示沿北进口顺时针过街行人到达位置点A的时刻; 直线段cgh表示沿西进口逆时针过街行人到达位置点H的时刻; 直线段ed表示行人离开位置点C走向位置点D的时刻; 直线段ji表示行人离开位置点F走向位置点E的时刻; 三角形abf与多边形f'b'c'de的面积之和为行人顺时针过街的总延误时间D(N-E); 三角形cgk与多边形k'g'h'ij的面积之和为行人逆时针过街的总延误时间D(W-S); tRN为北进口的累积行人红灯时间, tRN=tP(W-N)-tGW; tRW为西进口的累积行人红灯时间, tRW=tP(N-W)-tGN; tN为北进口的累积行人时间, tN=tRN+tGN; tW为西进口的累积行人时间, tW=tRW+tGW。
计算行人顺时针过街的总延误时间D(N-E), 如式(5)所示; 计算行人逆时针过街的总延误时间D(W-S), 如式(6)所示:
得到行人不固定方向过街的平均延误时间
事实上, 情形(1)可以看作情形(3)的一种特例, 此时由于行人不会沿西进口逆时针过街, 因此, tP(W-N)=C, tGW=tGN, tRN=C-tGN, tN=C, tW=0, D(W-S)=0, 式(5)与式(1)等价, 式(7)与式(2)等价。情形(2)可以看作情形(3)的另一种特例, 此时由于行人不会沿北进口顺时针过街, 因此, tP(N-W)=C, tGN=tGW, tRW=C-tGW, tW=C, tN=0, D(N-E)=0, 式(6)与式(3)等价, 式(7)与式(4)等价。
根据以上分析, 建立行人从位置区域i到位置区域j的延误模型通式, 如式(8)(9)(10)所示。该延误模型通式不仅不受交叉口信号相位设计的限制, 而且可以准确计算出交叉口内任意两两位置区域之间的行人连续过街延误。
式中:变量上标中的正号和负号分别表示沿顺时针和逆时针方向过街时的情况; D(i→ j)为行人从位置区域i到位置区域j的总延误时间; tRi为位置区域i的累积行人红灯时间; tP(i→ j)为离开位置区域i与走向位置区域j的行人通行相位绿灯启亮时间差; Δ tj为走向位置区域j的初始行人清空时间; ti为离开位置区域i的累积行人时间; q(i→ j)为从位置区域i到位置区域j的连续过街行人达到率; qSj为走向位置区域j的人行横道最大通行能力; t0(i→ j)为从位置区域i到位置区域j的第一次过街起点与最后一次过街起点之间的步行时间。其中, 沿顺时针与逆时针方向离开位置区域i的累积行人时间之和等于一个信号周期时长, 即
对于上述情形(3)而言, 延误模型通式(8)中的符号“ i” 与“ +” 组合等价为关系式(5)中的方向符号“ N” 及位置符号“ A” , 符号“ j” 与“ +” 组合等价为方向符号“ E” 及位置符号“ C” , 式(8)与式(5)一致; 延误模型通式(9)中的符号“ i” 与“ -” 组合等价为关系式(6)中的方向符号“ W” 及位置符号“ H” , 符号“ j” 与“ -” 组合等价为方向符号“ S” 及位置符号“ F” , 式(9)与式(6)一致。
在延误模型通式中, qSj由人行横道线的宽度决定, 通常远大于行人达到率q(i→ j); Δ tj由初始等待行人数量和人行横道最大通行能力共同决定, 通常取值较小; tRi、tP(i→ j)、ti、t0(i→ j)则与信号相位设计方案密切相关, 其取值大小直接决定行人连续过街的延误时间大小。
当交叉口内存在多个位置区域之间的连续过街需求时, 建立总的行人连续过街延误模型通式, 如式(11)(12)所示:
式中:i, j∈ U, U为行人连续过街需求的起止方向集合, 由多组位置区域对组成, 对于图1所示的交叉口而言, U={(A/H, D/E), (C/B, F/G), (E/D, H/A), (G/F, B/C)}。
以图1所示的交叉口为例, 已知位置点间距AB、CD、EF、GH均为24 m; 位置点间距BC、DE、FG、HA均为6 m; 行人步行速度为1.2 m/s; 连续过街行人到达率为0.2 人/s; 各人行横道最大通行能力均为10 人/s。假设交叉口采用四相位的进口单独放行方式; 信号周期为100 s; 每个机动车/行人信号相位时长为25 s, 其中行人绿灯时间为5 s; 行人红灯或绿闪时间(未进入人行横道的行人应驻足等候, 已进入人行横道的行人可继续通行)为20 s。针对A(H)→ D(E)方向的行人过街需求分析如下:
(1)当交叉口采用顺时针放行方式时, 利用延误模型通式(8)(9)(10), 分别计算行人沿顺时针、逆时针以及不固定方向过街时的延误时间, 如表1所示。
从表1可以看出, 行人沿顺时针方向过街的平均延误时间最小, 且约等于行人在第一次过街前的平均延误时间
(2)当交叉口采用逆时针放行方式时, 利用延误模型通式(8)(9)(10), 分别计算行人沿顺时针、逆时针以及不固定方向过街时的延误时间, 如表2所示。
从表2可以看出, 行人沿逆时针方向过街的平均延误时间最小, 且约等于行人在第一次过街前的平均延误时间
(3)当交叉口采用东南北西放行方式时, 利用延误模型通式(8)(9)(10), 分别计算行人沿顺时
针、逆时针以及不固定方向过街时的延误时间, 如表3所示。
从表3可以看出, 由于信号相位相序设置为东南北西时, 可以为A(H)→ D(E)方向的过街行人在顺时针(A→ D)和逆时针(H→ E)两个方向上各形成一条行人绿波带, 因此行人采用不固定方向过街时的平均延误时间最小, 且约等于行人在第一次过街前的平均延误时间
当交叉口采用其他信号相位相序设计时, 同样可以利用延误模型通式, 分别计算行人沿顺时针、逆时针以及不固定方向过街时的延误时间。整理A(H)→ D(E)方向3种行人过街方式在各种相位相序设置下的延误时间, 如表4所示。
| 表1 顺时针放行相位设计下的行人过街延误时间 Table 1 Delay time of pedestrian crossing under signal design mode of clockwise green light s |
| 表2 逆时针放行相位设计下的行人过街延误时间 Table 2 Delay time of pedestrian crossing under signal design mode of counterclockwise green light s |
| 表3 东南北西放行相位设计下的行人过街延误时间 Table 3 Delay time of pedestrian crossing under signal design mode of east-south-north-west green light s |
| 表4 A(H)→ D(E)方向行人过街延误时间分析 Table 4 Delay time analysis of pedestrian crossing from A(H)→ D(E) s |
由表4可知, 对于A(H)→ D(E)方向的行人过街需求而言, 交叉口的相位相序采用东南北西放行最佳, 其次为顺时针和逆时针放行, 再次为东北南西和东西南北放行, 最差为东西北南放行; 当交叉口采用顺(逆)时针放行方式时, 行人沿顺(逆)时针方向过街的平均延误时间最小, 且在第一次过街后将实现绿波通行, 当交叉口采用其他放行方式时, 则行人沿不固定方向过街的平均延误时间最小。因此需要合理设置信号相位相序和行人引导策略, 以实现行人在信号交叉口处的连续过街通行。而对于其他方向以及多个方向的行人过街需求, 同样可以利用延误模型(8)(9)(10)(11)(12), 分析计算不同相位相序设置方式下行人沿顺时针、逆时针以及不固定方向过街时的延误时间, 从而确定最佳的信号相位相序和行人引导策略组合。
针对上述算例, 选用微观交通仿真软件Vissim, 仿真模拟不同信号相位相序设置和行人过街组织方案下A→ D方向行人过街的整体运行效果。由于现有仿真软件难以精确模拟出行人沿不固定方向过街时的路径自主选择行为, 因此分别选取顺时针和逆时针两种过街方式下的行人延误情况进行仿真分析。
根据算例给定的交叉口几何条件和行人交通特性参数, 在Vissim环境中建立仿真交叉口, 通过设定行人采取顺时针或逆时针过街方式时的行走路径, 分别模拟不同信号相位相序设置条件下行人斜穿信号交叉口的行走过程, 并选取平均延误作为最终评价指标输出。
仿真试验得到A→ D方向行人沿顺时针和逆时针方向过街的延误时间, 分别如表5和表6所示。
由表5和表6可以看出, 行人延误时间的仿真结果与模型计算结果非常一致, 其偏差都在3%以内, 从而验证了行人连续过街延误模型通式的准确性和可靠性, 实现了行人斜穿信号交叉口的延误时间准确计算。
| 表5 A→ D方向行人沿顺时针方向过街的延误时间 Table 5 Delay time of pedestrian crossing clockwise from A to D s |
| 表6 A→ D方向行人沿逆时针方向过街的延误时间 Table 6 Delay time of pedestrian crossing counterclockwise from A to D s |
从行人斜穿信号交叉口的实际过街需求出发, 针对不同信号相位相序设置和行人过街组织方案, 利用时距图对行人连续过街进行了绿波分析, 给出了行人连续横穿信号交叉口的绿波带设计方式, 实现了给定方向下行人连续过街的绿波通行; 根据行人到达和离开位置点的时刻线, 推导了行人沿顺时针、逆时针以及不固定方向连续过街的延误模型, 针对交叉口内多个位置区域之间的连续过街需求, 建立了适用于任意信号相位相序设置的行人连续过街延误模型通式, 实现了行人斜穿信号交叉口的延误时间准确计算, 为交叉口信号控制方案的分析评价和优化设计提供了一个新视角。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|