


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
含坡度变化率信息的道路坡度估计
[林楠 , 施树明, 马力, 隗海林]
, 施树明, 马力, 隗海林]
, 施树明, 马力, 隗海林]
|
|


作者简介:林楠(1988-),女,博士研究生.研究方向:车辆运行仿真.E-mail:linnan11@mails.jlu.edu.cn
运用现代控制理论解决实时道路坡度估计问题时通常假设道路坡度是不变的,虽然道路坡度相比于其他车辆状态参数是缓慢变化的,但是完全忽略道路坡度变化率特征会造成较大的时间延迟。为了弥补这一缺点,本文运用纵向加速度传感器表达了道路坡度的变化率信息,在此基础上建立了车辆速度、加速度与道路坡度的状态转移关系,从而构建了坡度估计卡尔曼滤波器。试验结果表明,考虑道路坡度变化率能有效降低道路坡度在线估计的延迟现象。
A road grade estimation method, which uses road grade change rate information, was proposed. The change rate of road grade is often ignored by researchers while using modern control theory to solve on-line road grade estimation, which may cause time lag inevitably. To eliminate this shortcoming, the acceleration measured from longitudinal sensor was introduced to express the change rate of road grade. Then, the state transition matrix including vehicle speed, vehicle acceleration and road grade was built. Finally a Kalman filter for road grade estimation was constructed. Experimental results show that the propose road grade estimation method considering the grade change rate information can reduce the time lag obviously.
目前能够实时对道路坡度进行估计的方法主要有3种:利用GPS高程信息估计道路坡度; 利用CAN总线信息和行驶方程估计道路坡度; 额外添加加速度传感器来估计道路坡度。
Bae等[1]运用车载GPS分别测量整车行驶的垂直和水平位移, 进而根据道路坡度的定义计算坡度。这种坡度计算方法对GPS的精度要求较高, 然而目前高精度GPS设备并不是普通车辆的标准配置, 而且该方法的稳定性受GPS通讯信号限制, 不能保证坡度估计的连续有效性。
利用行驶方程估计道路坡度的方法主要是运用车辆CAN总线采集发动机驱动信息(发动机力矩或轮边驱动力)[2, 3]、车速等信息。该方法的最大优点是无需额外传感器信息, 信号均由CAN总线提供。瑞典的Sahlholm等[4, 5]提出了一种基于GPS和CAN总线的Kalman估计算法。Sebsadji等[6]采用龙贝格状态观测器来估计道路坡度, 通过建立轮胎模型根据轮胎力来计算驱动力, 避免了用传动模型计算纵向力时对档位等信息的要求。
利用行驶方程式计算道路坡度的优点是无需配备额外的传感器。然而, 这种方法存在诸多弊端:首先, CAN总线提供的驱动力精度有限, 目前发动机驱动力的计算多依靠发动机台架试验的稳态标定, 其转矩的测定都是在固定转速和节气门开度的条件下测定的, 无法表达发动机的瞬态响应; 其次, 车轮滚动半径会随着胎压变化, 滚动阻力系数也与路面条件有关, 诸如此类的整车参数都会随着车况和环境变化, 不加区分地在任何工况下均使用同一套整车参数势必会使误差增大; 另外, 转弯时的侧向运动和加速或减速工况下的车轮滑移也会使纵向行驶方程式产生较大误差。
在车架加装纵向加速度传感器可以较好地解决坡度估计问题。因为增加了可观测的量, 坡度估计结果的精度大大提高。罗培培[7]和Klompa等[8]分别运用卡尔曼滤波器和状态观测器法估计道路坡度。Jo等[9]运用GPS信息、加速度传感器信息和行驶方程式建立联合估计模型, 发挥各个模型的优点, 保证了坡度计算的精度和稳定性。
纵观现有的坡度估计模型, 存在的一个共同的缺点是并未对道路坡度本身进行建模, 在构造包含道路坡度的状态转移模型中均假设道路坡度是不变的。这种简化忽略了道路坡度自身变化率信息, 尤其在坡度变化率较大时会表现出估计结果有较为严重的延迟现象, 使估计结果难以在估计误差和时间延迟两个方面同时取得较好的效果。
本文提出了一种运用加速度传感器信息和车速信息估计道路坡度的方法, 该方法考虑了道路坡度的变化率, 使在线估计的延迟现象有明显改善。
在运用现代估计理论建立坡度估计模型时, 由于道路坡度自身慢变且其变化率无法测量或计算, 只能假设坡度的变化率为零。然而在整车添加加速度传感器不仅可以采集到精度较高的纵向加速度信息, 也可以利用其微分值来表达道路坡度的变化率信息。本节首先利用加速度传感器采集的信息估计道路坡度的变化率, 然后建立道路坡度估计卡尔曼滤波模型。
加速度传感器的定义式为:
式中:asen为传感器采集到的加速度值; a为车辆行驶的加速度值, 它是车速的微分量; g为重力加速度值; i为道路坡度。
对式(1)做微分运算得:
式(3)可用于估计道路坡度的变化率信息。由于需要求解的坡度变化率包含大量的噪声, 需要运用滤波算法对坡度变化率信息加以处理。待滤除的噪声主要有传感器采集过程中的噪声和微分运算产生的高频噪声。分析这两项噪声产生的原理可知噪声的性质均应为高斯噪声。而最小二乘算法可以在保证较好跟随性的前提下滤除大量的高斯噪声, 故而坡度变化率的估计选用最小二乘算法。
为了保证较好的实时性, 本文选用含遗忘因子的最小二乘算法来滤除噪声, 最小二乘算法的计算公式如下:
式中:估计的参数
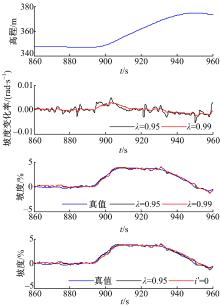
图1为坡度变化率估计结果, 可以看出原始数据中包含大量噪声, 经过最小二乘滤波后噪声有明显改善, λ 取值越大, 得到的结果越平滑, 相应的时间延迟也越大。
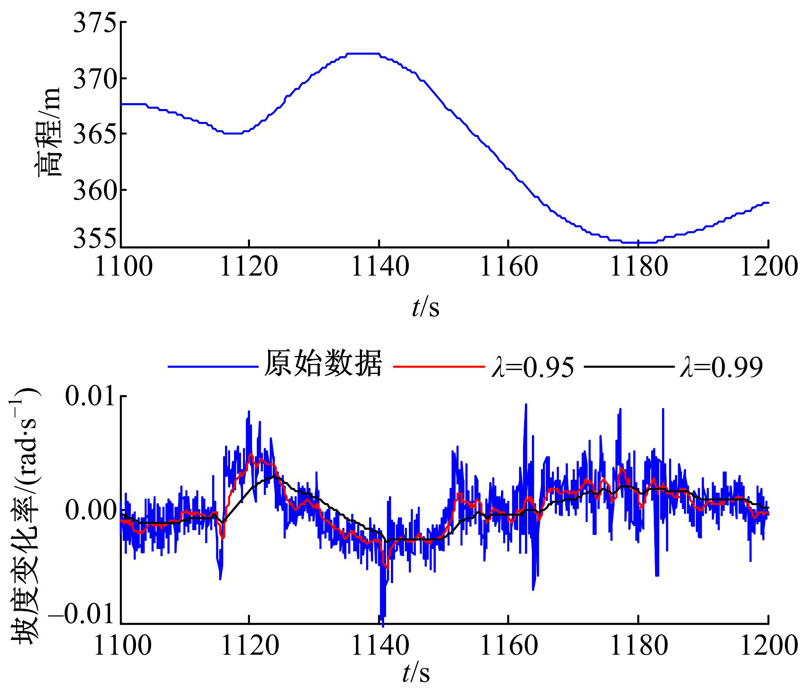 | 图1 道路坡度变化率估计结果Fig.1 Estimation results of road grade change rate |
建立运用整车车速和传感器加速度估计道路坡度的卡尔曼滤波器, 会涉及到整车速度和行驶加速度信息。根据作者已有的研究结论[10], 包含整车行驶速度、车辆行驶加速度的两参数汽车运行工况具有马尔可夫性, 利用速度与加速度关系的运动学公式和跟驰模型, 车辆行驶速度和加速度的二维状态动力学过程可以表述为:
式中:δ =0.9为驾驶员反应强度系数。
考虑在此模型的基础上加入坡度信息建立三维状态转移方程, 根据坡度变化率的表达式(式(3)), 则有离散形式下任意时刻道路坡度计算公式如下:
建立包含车速、车辆加速度和道路坡度的三维状态转移模型有:
式中:[v a i]T=X为状态向量;
模型的观测量是由纵向车速和加速度传感器采集到的加速度信息, 根据单轴加速度传感器定义式(1)建立形如Zk=h
式中:
至此, 建立了状态估计的状态方程和观测方程。接下来利用式(9)进行道路坡度的估计:
式中:
图2为算法的整体结构, 该坡度估计算法的结构融合了RLS和KF, 分别选取不同的估计模型是充分考虑各变量自身的物理特性。因为道路坡度变化率是一个相对慢变的物理量, 并不需要很高的实时性, 使用含遗忘因子的RLS估计相对慢变坡度变化率是合理的。另一方面, KF算法包含车速和加速度, 是快变量, 用KF估计道路坡度可以保证结果的实时性。此外, RLS模型中还有效利用了KF的估计结果, 式(2)中的a'利用KF输出的状态变量aest求导所得, 这样可以有效避免对车速二次求导产生大量噪声使信号失真。
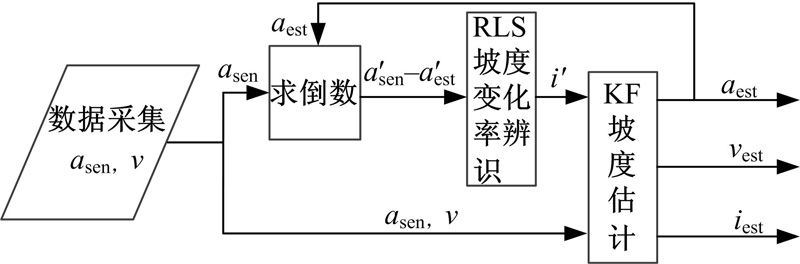 | 图2 坡度估计算法流程图Fig.2 Overview of road grade estimation algorithm |
选取了吉林省境内国道G303为试验路线。试验车为某款重型牵引车, 试验车驾驶室后方的车架上加装单轴加速度传感器, 用DEWE同步采集车辆CAN总线信息、加速度传感器信息和GPS信息。
表1中列举了试验过程中采集到的信息, 其中离线计算的“ 真值” 将在2.2节详细讲述。
| 表1 采集的试验数据 Table 1 Test data acquisition |
为了方便坡度估计算法的评价, 需要获取真实道路坡度信息进行定量的对比分析。然而真实道路坡度的测量受试验条件的限制, 在长达几十公里的试验路线上逐点测量道路坡度是不现实的。本文将利用加速度传感器信息离线计算道路坡度, 用于接下来的算法效果评价。
利用加速度传感器计算道路坡度的原理是利用加速度传感器的定义式(1), 道路坡度可用下式计算:
为了得到平滑的道路坡度信息, 坡度计算公式中所需的传感器加速度和整车加速度(车速的微分量)需要经过低通滤波处理。由于传统的低通滤波器在消除噪声的同时会产生相位延迟的现象, 离线的“ 真值” 计算使用零相移滤波器对数据进行处理。该滤波器采用正反双向滤波消除了传统单向滤波的相位差。
设计两组对比试验, 第一组为说明坡度变化率估计RLS中不同遗忘因子λ 取值对坡度的影响, 选取遗忘因子分别为0.95和0.99。第二组展示了是否考虑道路坡度变化率对坡度结果的影响, 不考虑道路坡度变化率即在状态转移矩阵中无控制向量U, 这与如前所述现有的研究成果中假设道路坡度变化率为0是一致的。首先展示了坡度估计结果的时间序列曲线, 接下来将利用离线计算的坡度“ 真值” 对坡度估计结果的瞬时误差进行定量计算。最后利用ISO体系中评价操纵稳定性的试验方法计算坡度估计结果的时间延迟。分析结果表明:引入坡度变化率的坡度估计模型在减小坡度估计时间延迟方面有显著优势, 对瞬时误差也有小幅度的改善。
图3为一段坡度连绵起伏地段的坡度估计结果, 在坡度变化率比较大的阶段坡度结果均有时间延迟, 但是随着时间的推移, RLS模型可以估计出正确的道路坡度变化率, 进而正确修正坡度估计的一步预测结果, 坡度估计结果中的时间延迟可以被有效降低, 而不含坡度变化率的坡度结果将会始终保持这种延迟。
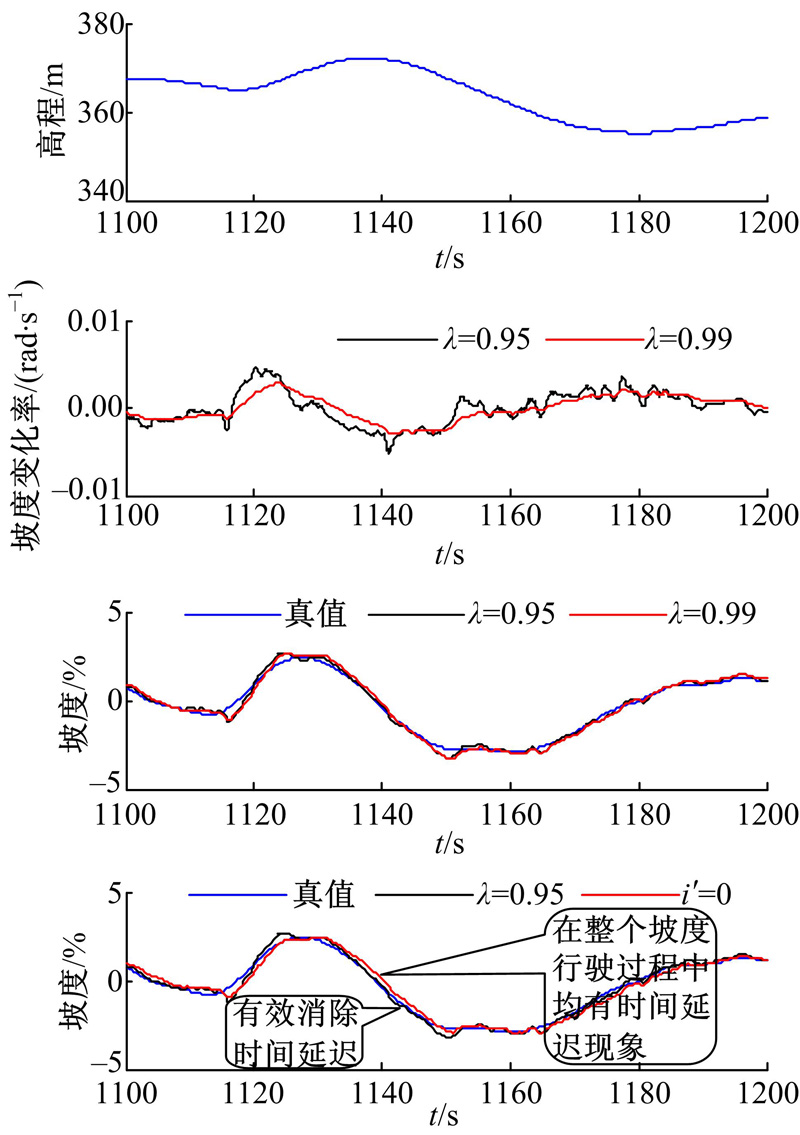 | 图3 坡度估计结果时间序列图(组1)Fig.3 Time series of estimated road grade(group1) |
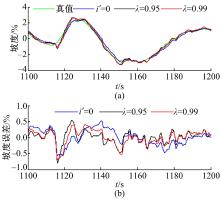
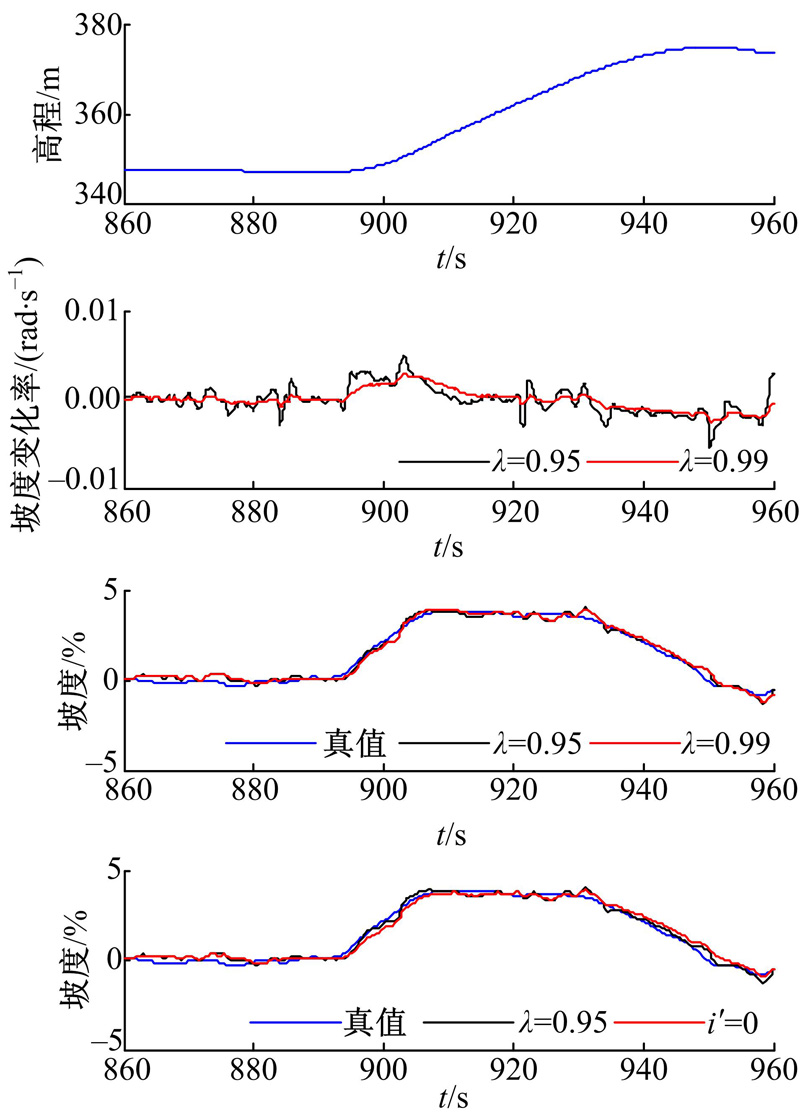 | 图4 坡度估计结果时间序列图(组2)Fig.4 Time series of estimated road grade(group2) |
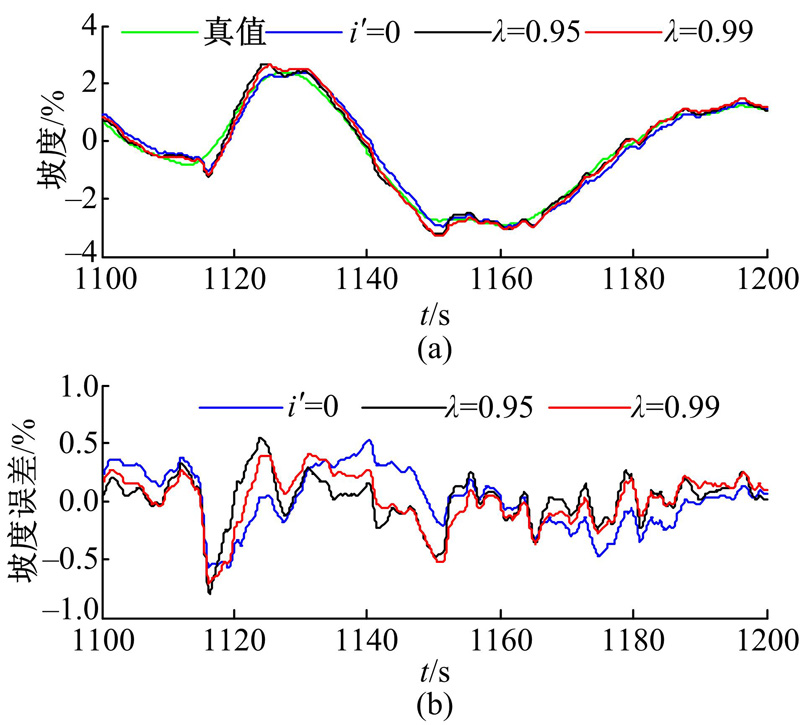 | 图5 道路坡度估计结果及其误差的时间序列Fig.5 Time series of estimated road grade and error |
图4中曲线的前半段展示了近似为平路的估计结果, 虽然高程曲线显示在该路段上高程几乎是不变的, 但是无论是离线“ 真值” 还是在线估计结果都是在0附近波动, 并且在该路段坡度变化率对坡度估计结果并无显著影响。因为在平路上, 真实的坡度变化率几乎为零, 所以无论是选择了不同的最小二乘遗忘因子还是直接将坡度变化率置零对坡度估计结果均没有显著影响。
误差的定义是在每一时刻坡度的估计值与“ 真值” 的差值。图5为在不同参数下, 坡度估计结果和其误差的时间序列。
选择一些误差的统计指标进行评价, 包括误差均值, 误差绝对值的均值, 误差标准差和误差最大值。表2为平路的误差统计结果和总体的误差统计结果。注意表中的%与坡度的单位一致, 并不是表达误差占真值的百分比。
从表2可以看出, 由于数据精度较好, 不论是否使用坡度变化率估计模型, 所有坡度估计的结果的误差都不是很大。坡度估计的误差最大值均不超过1%, 误差绝对值的均值不超过0.3%。
平路的误差结果显示:引入坡度变化率表达坡度变化率会使估计结果的噪声含量增加, i'=0的误差结果要比其他的小, 但是增加噪声是非常小的。总的来说, 坡度估计结果对坡度变化率的噪声含量并不敏感。
| 表2 坡度估计结果误差统计 Table 2 Error statistics of grade estimation results % |
总体的误差则显示用坡度变化率的结果要好于不使用坡度变化率的结果, 使用较低的遗忘因子可以使误差更小。但是, 这种瞬时偏差很大程度上是延迟带来的。
时间延迟是评价坡度估计结果的重要参数, 在整车控制中对坡度的实时性要求较高。本文用于评价坡度估计时间延迟的方法来源于ISO评价体系中一种用于测量车辆操纵稳定性响应情况的试验规范[11]。该试验用于评价在行驶路径为一个正弦函数输入下, 车辆瞬态开环响应效果, 在试验过程中提出了一种用于测量方向盘转角与车辆侧向加速度和横摆角速度的时间延迟的方法。
这种测量时间延迟方法的思路是:在选定的、依照一定步长划分的延迟时间范围内, 依次对输入信号做响应时间的延迟, 得到延迟的输入信号, 计算延迟的输入信号和响应信号的相关系数, 绘制延迟时间与相关系数函数, 在相关系数最大时对应的延迟时间就是输入信号与响应信号间的时间延迟。
依据该方法计算图3试验数据的时间延迟和对应的最大相关系数, 结果如表3所示。
随着坡度变化率估计算法中遗忘因子的增大, 坡度的时间延迟增大, 含坡度变化率的坡度估计模型时间延迟可以控制在1 s以内。 为了获取更小的时间延迟效果, 遗忘因子的推荐取值是0.95。
| 表3 延时效果计算结果 Table 3 Result of time lag calculation |
提出了一种能够表达道路坡度变化率的坡度估计模型, 该模型结合了最小二乘算法和卡尔曼滤波器来估计道路坡度, 并运用理论和试验的方式验证了模型的可行性。试验结果表明:最小二乘算法可以计算得到真实、稳定的道路坡度变化率信息。坡度变化率结果的噪声含量对坡度估计结果影响并不大。但是使用坡度变化率坡度估计方法可以有效地降低在线估计的时间延迟现象。含坡度变化率的坡度估计模型时间延迟可以控制在1 s以内。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|