



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
微机电系统后坐保险机构温度相关动态特性
[何光 , 张铭, 袁双石]
, 张铭, 袁双石]
, 张铭, 袁双石]
|
|


作者简介:何光(1968-),男,副教授,博士.研究方向:智能探测与控制技术.E-mail:heguang@bit.edu.cn
搭建了一套由高冲击加载系统、温度加载系统以及高速显微光学成像系统组成的典型微机电系统(MEMS)结构温度相关动态测试系统,用该系统对引信用MEMS后坐保险机构在温度和冲击载荷耦合环境下进行动态特性测试,得到了不同温度(-40℃~50℃)下引信用MEMS后坐保险机构中滑块相对于基板框的位移-时间曲线以及速度-时间曲线。通过对比分析,得出冲击条件下温度对MEMS后坐保险机构中滑块相对于基板框的位移以及速度的影响规律。
A structure's temperature-related dynamic testing system of a Micro-electromechanical System (MEMS) was built. This testing system consists of high impact loading system, temperature loading system and high-speed photography system. Using this system, the dynamic characteristics of fuse MEMS setback arming device was tested under temperature and impact load coupled environment. The relative displacement-time curve and velocity-time curve between slider and baseplate of the MEMS setback arming device were obtained at different temperatures (-40 ℃~ 50 ℃). Through the comparative analysis of the curves, the effect of the temperature on the relative displacement and velocity between the slider and baseplate of the MEMS setback arming device under impact load condition was obtained.
微机电系统(MEMS)技术以其自身特点非常适合在引信中应用, 它不但可以实现引信的微小型化、大批量生产成本低的目标, 而且可以提高其抗冲击和抗高过载的性能[1]。可靠性是MEMS器件重要的性能指标之一, 随着MEMS技术的不断发展与MEMS器件日益广泛的应用, 要求MEMS器件能适应恶劣的工作环境。与此同时, 评价微尺度结构和器件的力学行为成为了当前研究的前沿问题[2]。电铸镍MEMS器件在不同环境下(包括温度、湿度、酸碱度等)的性能和响应特性是不同的, 环境温度对材料的力学性能会产生影响, 高温会使材料出现热软化现象, 低温会使材料出现低温硬化现象[3]。王亚军[4]对UV-LIGA镍材料在不同温度下的动态特性进行了实验研究, 得到了UV-LIGA镍材料在不同应变率下的本构关系。He等[5]采用单轴拉伸的方法研究了电铸镍材料在静态下的力学性能。
按照引信设计手册要求, 必须保证引信安全系统在高、低温以及冲击载荷耦合的复杂环境下能够可靠工作[6]。目前, 国内研究人员主要通过MEMS安全系统结构设计和仿真、原理样机加工和炮射试验来验证其设计的可行性及有效性[7, 8, 9, 10, 11, 12], 由于缺少实验测试设备, 尚未开展实验室条件下引信用典型MEMS结构在温度及冲击载荷耦合环境下的动态特性研究, 其动态机动过程和失效演化模式无法得到了解。因此, 作者对温度和冲击载荷耦合环境下的引信用典型MEMS结构的动态测试装置开展研究, 进而研究引信用典型MEMS结构在温度和冲击载荷耦合环境下的动态特性。
本文搭建的实验系统为典型MEMS结构温度相关动态测试系统, 包括3个子系统, 即高冲击加载系统、温度加载系统和高速显微光学成像系统。
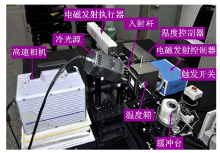
高冲击加载系统(见图1)可为试件提供高冲击载荷, 主要由微小型霍普金森杆系统、加速度传感器、电荷放大器和计算机构成。其中微小型霍普金森杆系统由子弹、入射杆、电磁发射控制器、电磁发射执行器以及触发开关组成。
 | 图1 高冲击加载系统Fig.1 High impact loading system |
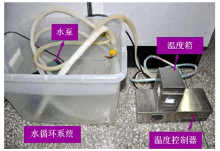
温度加载系统可对试件进行高低温加载, 由温度箱、温度控制器、水循环系统构成, 如图2所示。其中温度控制器采用PID控制, 可实现对温度箱温度从-50 ℃到70 ℃的控制; 水循环系统主要用于对温度箱内部的热电制冷片进行散热, 以防止其由于过热而失效。
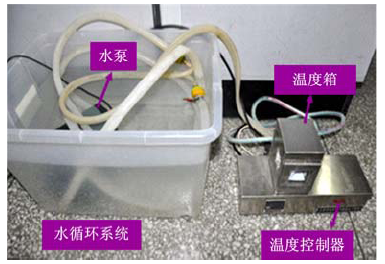 | 图2 温度加载系统Fig.2 Temperature loading system |
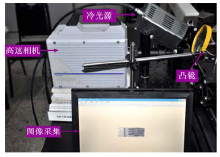
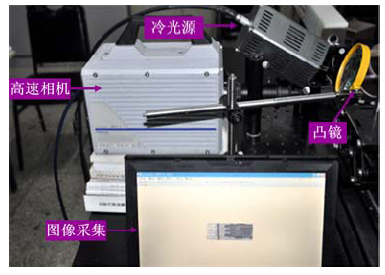 | 图3 高速显微光学成像系统Fig.3 High-speed microscopic photography system |
高速显微光学成像系统可对试件在实验中的运动过程进行拍摄记录, 由高速相机、冷光源、透镜和图像采集软件等组成, 如图3所示。本实验系统选用的高速相机为日本Photron FastCam SA1.1高速相机, 最大帧频为675 000 帧/s, 最大分辨率为1024× 1024像素, 内存为16 G。
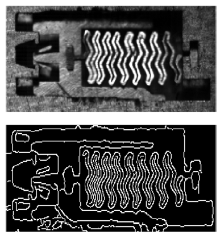
本实验所测试的样品为引信用镍质MEMS后坐保险机构, 其零件采用LIGA工艺加工而成, 包括基板框、W型微弹簧及后坐滑块。图4为MEMS后坐保险机构在显微镜下观测到的图片。
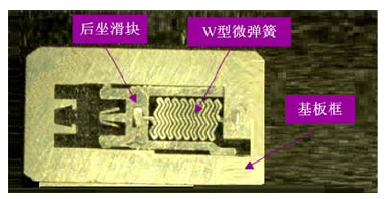 | 图4 引信用MEMS后坐保险机构Fig.4 Fuse MEMS setback arming device |
本文研究的MEMS后坐保险机构要求安装在霍普金森压杆上。为使子弹撞击入射杆的冲击力方向与MEMS后坐保险机构的中心线在一条直线上, 本文对霍普金森压杆进行了改进, 在杆上开了一个凹槽, 凹槽的长度、宽度以及深度均分别略大于后坐保险机构的长度、宽度以及高度。在透明的有机玻璃片上开两个略大于M2的孔, 两个M2的螺栓穿过有机玻璃片将MEMS后坐保险机构固定在霍普金森杆上, 这样可以使MEMS后坐保险机构在受到冲击高过载时不至于脱离霍普金森杆。试件装配后如图5所示。
 | 图5 试件装配图Fig.5 Specimen assembly drawing |
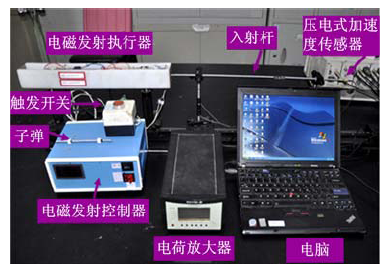
装配完成后的实验系统如图6所示。实验开始时, 首先, 打开冷光源, 调节相机的拍摄速度到100 000 幅/s, 分辨率为320× 128像素, 使高速相机能够在静态下清楚地拍到MEMS后坐保险机构; 然后将电磁发射执行器充电电容组的电压充到350 V(此时系统可加载的冲击加速度峰值为40 700 g、脉宽为60 μ s); 调节温度控制器使温度箱内的温度达到某一具体值(50、25、0、-20、-40 ℃五个温度节点), 在每一个温度节点各做5组实验, 每组实验保温30 min, 保温完成后, 先后按下高速相机的触发开关和电磁发射执行器的触点开关, 之后子弹加速撞击霍普金森入射杆, 入射杆带动MEMS后坐保险机构向右运动。由于惯性力的存在, MEMS后坐保险机构中滑块相对于基板框向左运动, 高速相机拍摄下这一运动过程并将其保存到电脑上。
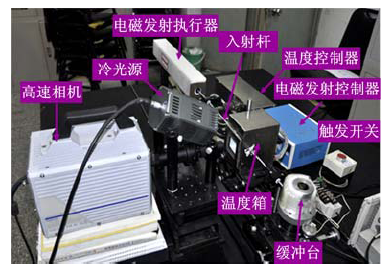 | 图6 典型MEMS结构温度相关动态测试系统Fig.6 Typical MEMS structure’ s temperature-related dynamic testing system |
为了分析MEMS后坐保险机构中微弹簧、后坐滑块和基板框的运动规律, 需要用到图像处理技术, 基于Canny算法的边缘检测图像处理技术可以根据边缘灰度变化提取各部件的轮廓, 然后根据某个点在每相邻图片之间像素坐标的变化可以得到该点的位移、速度[13, 14], 从而可以得到MEMS后坐保险机构的动态机动过程。基于Canny算法的边缘检测原理及数学模型如下:
首先, 对图像进行灰度化处理; 之后, 对灰度化处理后的图像灰度值进行高斯滤波; 再采用一阶有限差分对图像灰度值梯度进行近似, 这样就可以得到图像灰度值在x和y方向上偏导数的两个矩阵, 其x向、y向的一阶偏导数矩阵、梯度幅值以及梯度方向的数学表达式依次为:
式中: i, j为灰度图中像素点在x、y方向上的坐标值。
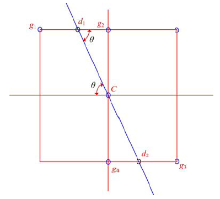
最后, 对梯度幅值进行非极大值抑制:图像梯度幅值矩阵中的元素值越大, 说明图像中该点的梯度值越大, 其为边缘点的可能性也就越大。非极大值抑制法通过将非极大值点所对应的灰度值置为0, 可以剔除掉一大部分非边缘的点, 其原理图如图7所示, 其中gi为像素点C邻域内的4个像素点编号, i=1, 2, 3, 4。
 | 图7 非极大值抑制原理Fig.7 Non maximum suppression principle |
根据图7可知, 要进行非极大值抑制, 首先要确定像素点
在Matlab中运行Canny算法程序, 提取了MEMS后坐保险机构的边界轮廓如图8所示。
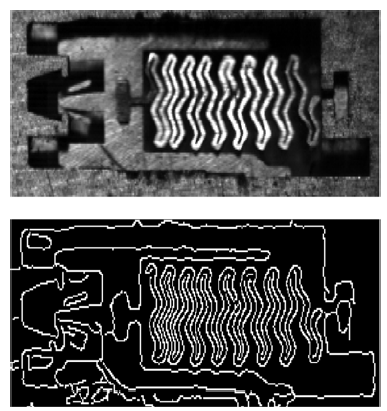 | 图8 MEMS后坐保险机构的边界轮廓图Fig.8 Edge outline of MEMS setback arming device |
选取图8轮廓上某点为研究对象, 其原点坐标为图像左上角的一点, 取向左为X轴正方向, 向下为Y轴正方向。该点在某一幅图的坐标为(x1, y1), 10 μ s后下幅图的坐标为
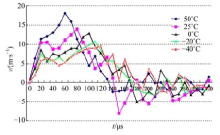
采用3.2节中计算方法得到不同温度下MEMS后坐保险机构中滑块相对于基板框前300 μ s(300 μ s后试件已离开高速相机拍摄范围, 但仍处于运动状态)的位移-时间曲线和速度-时间曲线, 如图9和图10所示。
 | 图9 滑块相对基板框位移-时间曲线Fig.9 Relative displacement-time curves between slider and baseplate |
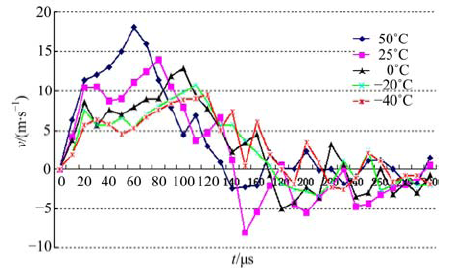 | 图10 滑块相对基板框速度-时间曲线Fig.10 Relative velocity-time curves between slider and baseplate |
从图9以及图10中位移-时间曲线和速度-时间曲线可以得出以下结论。
(1)高温50 ℃时, 后坐滑块在惯性力的作用下向左运动, 滑块底部的卡头在130 μ s时完全进入基板框底部的卡座(滑块相对基板框位移达到1230 μ m)并被卡住, 后坐保险得到解除; 在其他温度下, 卡头均未完全进入卡座, 滑块相对基板框向左运动一段距离后在弹簧的回复力作用下又被拉动向右运动, 后坐保险没有解除。
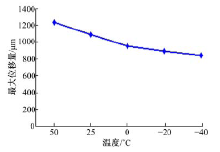
(2)MEMS后坐保险机构受到高过载的冲击力后, 在高温50 ℃时, 滑块相对于基板框的最大位移量达到最大, 为1230 μ m; 其他温度下, 滑块相对于基板框的最大位移量随着温度的降低而依次递减, 分别为1093、950、894、837 μ m。同时, 从位移-时间曲线中可以看出, 滑块相对于基板框运动到最大位移时的时间随着温度的降低而增大, 这是因为随着温度的降低, LIGA镍材料的弹性模量增大, 从而造成微弹簧的刚度系数增大, 出现低温应力强化现象, 使得微弹簧拉伸比较困难。图11为不同温度下后坐滑块相对于基板框的最大位移量。
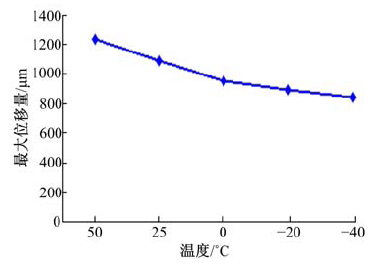 | 图11 不同温度下后坐滑块相对基板框最大位移量Fig.11 Maximal displacement between slider and baseplate under different temperature |
(3)通过对比不同温度下卡头底部运动到卡座顶部(此时相对位移为630 μ m)时滑块的速度以及所经历的时间, 可以得到:高温50 ℃时滑块相对于基板框的速度最大, 且运动速度随着温度的降低而减小, 所经历的时间随着温度的降低而增大。不同温度下滑块相对基板框位移达到630 μ m时滑块的相对速度和耗时如表1所示。
| 表1 不同温度下滑块相对于基板框位移为630 μ m时的速度及耗时 Table 1 Slider’ s speed and time consumption when relative displacement between slider and baseplate is 630 μ m under different temperature |
搭建了一套可施加温度与高冲击载荷耦合条件的MEMS典型结构动态特性测试系统。应用该系统对引信用MEMS后坐保险机构进行了测试, 并采用基于Canny算法的边缘检测图像处理技术得出了其后坐滑块在不同温度下的运动规律, 即后坐滑块的运动速度和最大位移随着温度的降低而减小, 在加速度峰值为40 700 g、脉宽为60 μ s的冲击载荷条件下, 后坐保险机构仅在50 ℃温度条件下解除保险。实验结论可为后期MEMS后坐保险机构的优化设计和实际应用提供理论依据。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|