江海, 李敏姣, 顾守东, 张莎莎, 张凯, 焦晓阳, 刘建芳. 谐振管对驻波悬浮特性的理论分析及实验. 2017, 47(1): 151-156 JIANG Hai, LI Min-jiao, GU Shou-dong, ZHANG Sha-sha, ZHANG Kai, JIAO Xiao-yang, LIU Jian-fang. Analysis and experiment of effect of resonant tube on characteristics of standing wave levitation. Journal of Jilin University Engineering and Technology Edition, 2017, 47(1): 151-156
Analysis and experiment of effect of resonant tube on characteristics of standing wave levitation
JIANG Hai, LI Min-jiao, GU Shou-dong, ZHANG Sha-sha, ZHANG Kai, JIAO Xiao-yang, LIU Jian-fang
College of Mechanical Science and Engineering, Jilin University,Changchun 130022,China
Abstract
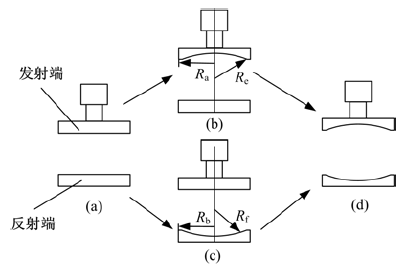
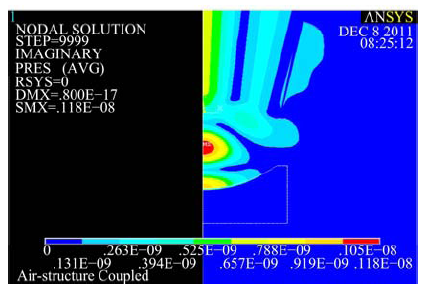
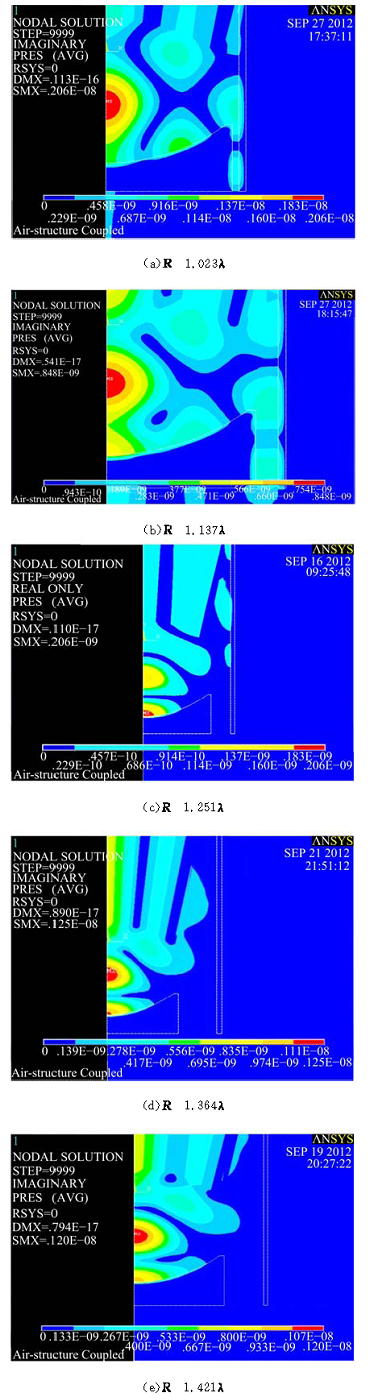
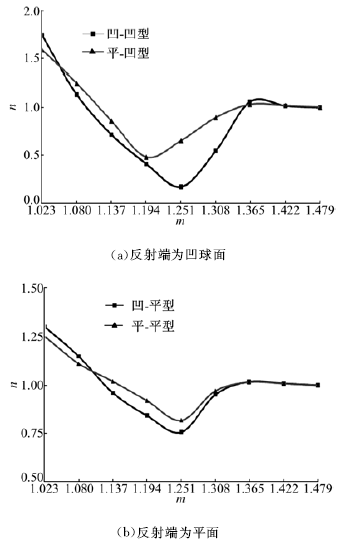
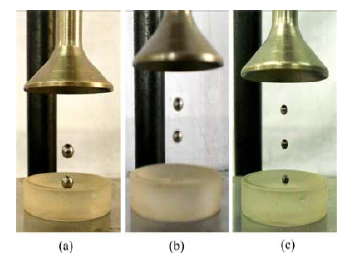
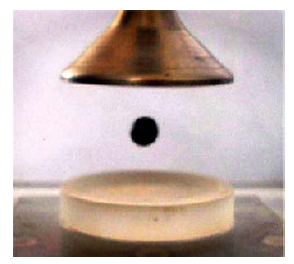
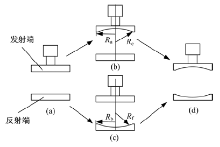
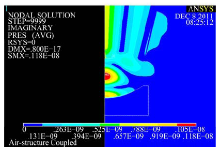
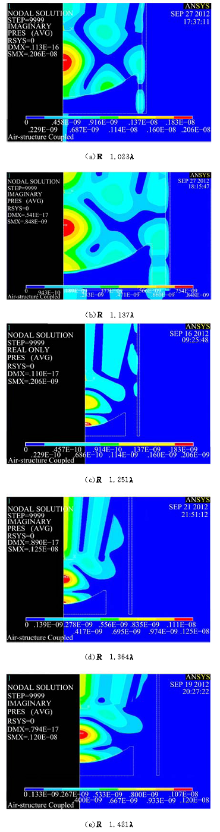
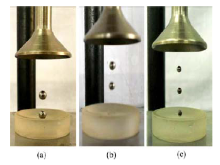
To study the effect of resonant cavity on the standing wave levitation device, four different kinds of standing wave levitation simulation model with different resonant cavities are established. The acoustic pressures of the four levitation models with no resonant cavity and with different resonant cavity radii are analyzed by ANSYS. It is found that, under certain condition, the addition of resonant cavity to the standing wave levitation device can increase its levitation ability, while under other condition it can also reduce the levitation ability. When the resonant cavity radius is slightly larger than the reflect end face radius, the increase rate of the acoustic levitation force is maximized. An experimental platform of concave-concave standing wave levitation was set up. The experiment results are consistent with theoretical analysis results. When the resonant cavity radius is 1.023 times of the wave length, a 6.5 mm diameter steel sphere can be suspended, while when the resonant cavity radius is 1.251 times of the wave length, a 5.5 mm diameter steel sphere can not be suspended by the device.
Kang BJ, Hung LS, Kuo SK, et al. 2DOF control for the motion of a magnetic suspension positioning stage driven by inverter-fed linear motor[J]. Mechatronics, 2003, 13(7): 677-696. [本文引用:1]
[2]
Paradis PF, IshikawaT, YodaS. Non-contact measurements of surface tension and viscosity of niobium, zirconium, and titanium using and electrostatic levitation furnace[J]. International Journal of Thermophysics, 2002, 23(3): 825-842. [本文引用:1]
[3]
AshkinA. Acceleration and trapping of particles by radiation pressure[J]. Physics Review Letters, 1970, 24(4): 156-159. [本文引用:1]
[4]
HennetL, CristiglioV, KozailyJ, et al. Aerodynamic levitation and laser heating: application at synchrotron and neutron sources[J]. European Physical Journal, 2011, 196(1): 151-165. [本文引用:1]
Jiao XY, Liu GJ, Liu JF, et al. Research on levitation coupled with stand ing wave levitation and electromagnetic levitation[J]. Journal of Mechanical Engineering, 2013, 59(12): 763-771. [本文引用:1]
School of Mechanical Engineering and Automation, Beijing University of Aeronautics and Astronautics, Beijing 100083, China
The technique of ultrasonic levitation has a wide application in the containerless processing and manufacturing of materials and the status simulation of space on the Earth. Taking advantage of the principle of ultrasonic focusing, a single axis ultrasonic levitation system was set up with the radiator designed into a concave circular one so as to improve the system’s capability of levitation. The distributions and characteristics of the sound field were investigated theoretically. The further research based on the numerical analysis was also conducted. Three sorts of ultrasonic levitation configurations were fabricated and a series of experiments were carried out consequently. The results show that the capability of levitation is directly proportional to the curvature radius of the radiator, as well as the distance between it and the reflector. And the results also proved that the performance of the focusing ultrasonic levitation system is higher than that of the conventional one.
A single-axis acoustic levitator driven by a magnetostrictive ultrasonic transducer was developed, which can stably levitate metallic, semiconducting and organic materials as dense as 11.3g/cm 3 in ground-based laboratory. Two types of resonant chambers were investigated by using boundary element approachin order to well understand the effect of chamber geometry on the sound field and, more importantly, on the capability and stability of acoustic levitation. The calculated results and experimental research indicate that the chamber possessing both a planar and a conical reflecting surface can produce radial positioning forces at the lowest mode. This makes its positioning capability larger than that of the chamber with only a planar reflecting surface.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 , 李敏姣, 顾守东, 张莎莎, 张凯, 焦晓阳, 刘建芳
, 李敏姣, 顾守东, 张莎莎, 张凯, 焦晓阳, 刘建芳