基于悬架虚拟主销运动计算的主动回正控制
 , 许男, 郭孔辉
, 许男, 郭孔辉 Active return control based on imaginary king-pin kinematics calculation
DING Jin-quan, XU Nan, GUO Kong-hui
, XU Nan, GUO Kong-hui 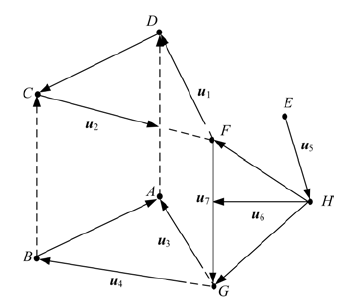
基于悬架虚拟主销运动计算的主动回正控制 |
|
丁金全, 许男, 郭孔辉 |
Active return control based on imaginary king-pin kinematics calculation |
|
DING Jin-quan
, XU Nan, GUO Kong-hui |
| 悬架-转向系统的运动学模型 |
| |