{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于高斯分解的多尺度3D Otsu阈值分割算法
[肖明尧1, 2  , 李雄飞
, 李雄飞2 ]
, 李雄飞]
|
|


作者简介:肖明尧(1980-),男,博士研究生.研究方向:数据挖掘与图像处理.E-mail:fengyuanqing@tom.com
针对阈值图像分割算法对噪音敏感的问题,提出了一种新的基于分解的Otsu阈值分割算法。整个分割算法为一个迭代过程,在每次迭代中,该图像首先用3D Otsu算法进行分割,然后利用高斯核函数对原图像进行滤波,得到一个平滑的图像,然后被输入到下一个迭代中。最后,合并每次迭代过程中产生的分割结果,获得最终的分割结果。该算法的优点在于分割结果稳定,且具有较强的抗噪性。本文在MR大脑图像上进行实验,结果表明,该算法优于其他同类阈值分割算法。
Current thresholding algorithms for image segmentation are sensitive to noise. To overcome this problem, a new Otsu thresholding algorithm is proposed based on image decomposition. The whole segmentation algorithm is designed as an iteration procedure. In each iteration the image is segmented by the 3D Ostu, and then it is filtered by Gaussian kernel filtering to get a smoothed image, which is taken as the input of the next iteration. Finally, segmentation results obtained in the iterations and are pooled to get final segmentation. The advantages of the proposed algorithm are that its segmentation results are stable and it is robust to noise. Experiments on medical MR brain images are conducted to demonstrate the effectiveness of the proposed method. Results indicate that the proposed algorithm is superior to other thresholding algorithms.
图像分割是指根据固有的特性(如灰度、质地、颜色和对比度等)将一个图像分割成若干非重叠的对象的技术[1, 2]。目前, 图像分割技术已广泛应用于灰色/彩色自然图像[3, 4, 5]、地形图[6]、卫星图像[7, 8]、和医疗图像等各种图像中[9, 10, 11]。
现有分割算法可分为4类:①阈值分割类[12, 13, 14]; ②聚类算法类[15]; ③水平集类[16]; ④图割类[17]。其中, 基于直方图的阈值分割算法因其实现简单、效率较高的特点使用最为广泛。最经典的图像阈值分割算法包括最大类间方差(Otsu)方法[18]、最小误差法[19]和最大熵法[20]。2012年, Lin等[21]提出了一种新的基于Tsallis熵和局部长程关联的阈值图像分割算法。Cai等[22]提出了一种基于Otsu的迭代三级阈值分割技术。Chang等[23]提出了一种基于三维重建和降维技术的自适应3D最小误差阈值算法。这些阈值算法如何扩展到多阈值是一项重要且极具挑战性的工作[7], 因为时间复杂度会随着阈值的数量呈指数增长[24]。
多年来, 出现了许多改进的阈值技术来解决效率问题。Sarkar等[3]提出了一种最小交叉熵(Minimum cross entropy, MCE)的算法, 可高效分离对象和背景。该方法利用差分进化(Differential evolution, DE)提高计算效率和鲁棒性。Bhandari等[7]提出了使用杜鹃搜索(Cuckoo search, CS)的多阈值分割算法。Manikandan等[12]使用遗传算法寻找最优阈值集。文献[13]提出了一种自适应细菌觅食(Adaptive bacterial foraging, ABF)算法用于脑部MRI分割, 其采用自适应步长提高了传统细菌觅食(Bacterial foraging, BF)算法的搜索能力。Hammouche等[25]提出了一种遗传算法与小波变换相结合的自动多阈值方法。该方法能够自动确定阈值的最佳数量以及最优阈值。
在过去几年中, 尽管图像分割技术得到了一定的发展, 但阈值分割技术仍然存在一些挑战, 如对噪音的鲁棒性较差[26]。为了降低阈值分割算法的敏感性, 本文提出了一种新的多尺度3D Otsu分割算法。整个分割算法为一个迭代过程。在每次迭代中, 该图像首先被3D Otsu进行分割, 然后利用高斯核函数对原图像进行滤波, 得到一个平滑的图像, 并被输入到下一个迭代中。最后, 合并每个迭代过程产生的分割结果, 从而获得最终的分割结果。引入多尺度技术的目的在于, 通过平滑处理可不断去除噪声, 从而避免分割结果出现孤立点(洞)。同时, 考虑到平滑也会带来边缘的模糊, 造成边缘位置处像素分割错误。所以, 将各迭代过程中产生的分割结果进行合并, 可保证在去除噪音的同时避免边缘区域的分割错误。
图像常被强度随机信号(也称为噪音)干扰。常见的噪音包括椒盐(Salt & Pepper)噪音、脉冲噪音、高斯噪音等。而噪音对于图像处理往往产生负面影响。因此, 对图像进行滤波以去除图像中的噪音则成为图像处理过程中重要的预处理步骤。
本文在滤波过程中, 选用高斯滤波器。原因在于高斯滤波器对去除正态分布的噪音有很好的效果, 同时对其他噪音的去除效果也有一定的效果。高斯滤波器是根据高斯函数的形状来选择权值的线性平滑滤波器。一维零均值高斯函数为
高斯滤波可看作是原图像与高斯函数的卷积运算, 对于源图像
式中:“ ° ” 为卷积操作算子。
Otsu是一种经典的图像阈值分割算法。三维Otsu算法不仅考虑了像素的灰度信息, 而且考虑到了像素的空间信息, 包括邻近均值和邻域中值。所以, 三维Otsu具有一定的抗噪性能, 其分割效果优于一维Otsu和二维Otsu算法。
给出一幅灰度图像I, 大小为M× N, 灰度级为L。f(i, j)表示图像I中第i行第j列像素的灰度值。g(i, j)和h(i, j)分别表示W× W邻域内该像素的邻域均值和邻域中值, 定义如下所示:
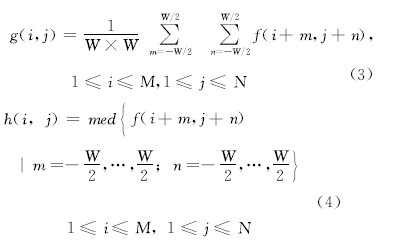
从式(3)和式(4)可以看出, g(i, j)和h(i, j)的取值范围均为0~L-1.
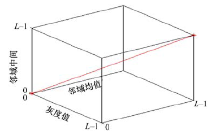
如图1所示, 三维Otsu直方图中的x, y, z坐标轴分别由f, g和h构成。直方图中的任意一点(x, y, z)表示图像I中的一个像素。设nxyz表示三元组(x, y, z)出现的次数, pxyz=nxyz/(M× N) 表示(x, y, z)出现的概率, 且M× N=
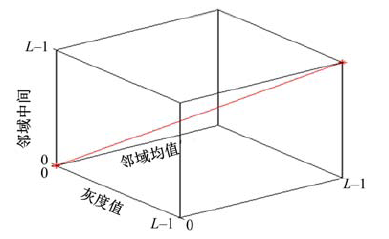 | 图1 三维Otsu空间Fig.1 3D Otsu space |
假定图像I被阈值三元组(r, s, t)分割为两个区域:背景区域C0和目标区域C1, 它们分别表示为C_0={(x, y, z)|0≤ x≤ r, 0≤ y≤ s, 0≤ z≤ t}和C1={(x, y, z)|r+1≤ x≤ L-1, s+1≤ y≤ L-1, t+1≤ z≤ L-1}。如下所示:
这两个区域的均值分别为:
图像
式中:μ T 表示图像I的总均值, 即:
三维Otsu阈值分割算法的目标是通过最大化矩阵
三维Otsu阈值分割算法中, 阈值通过式(11)动态确定, 即不同的图像会得到不同的阈值。
假设分解尺度为scale, 则分割结果可表示为
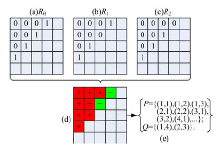
图2(a)(b)(c)分别表示三个分割结果。图2(d)为通过判断各个像素在图2(a), 图2(b)和图2(c)是否相同得到的分类图谱, 其中内含“ +” 的红色单元表示对应的像素在各个分割结果中所属区域一致; 内含“ -” 的绿色单元对应的像素在各个分割结果中所属区域存在不一致。图2(e)为获得的集合P和Q。
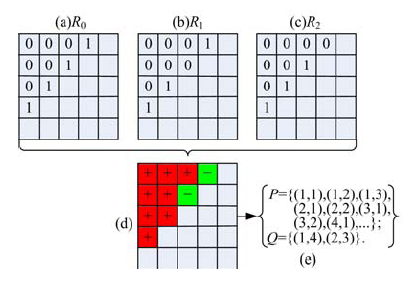 | 图2 像素分类示例Fig.2 Illustration of pixel classification |
对于像素
根据R(p)可以计算出每个类别的均值, 即{m1, …, mK}。
对于像素
其中:

式中:f(q)表示像素q在原图像中的灰度值。
从式(12)(13)中可知, 集合
令
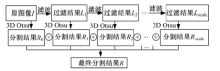
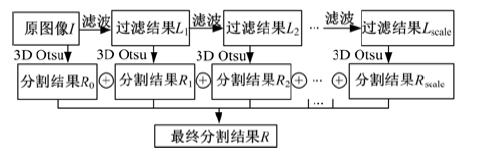 | 图3 本文分割算法框架Fig.3 Framework of the proposed segmentation algorithm |
Step 1 利用3D Otsu阈值分割算法对原图像
Step 2 利用高斯核函数对原图像
Step 3 迭代过程结束后, 利用式(15)将所有的分割结果
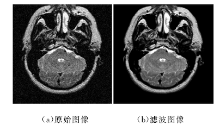
图4给出了高斯滤波的一个示例。可以发现, 经过滤波之后, 源图像中含有的噪音有了明显的减少。
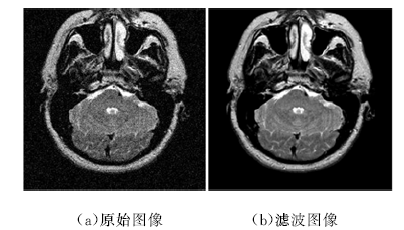 | 图4 高斯滤波示例Fig.4 Illustration of Gaussian Filtering |
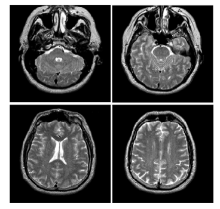
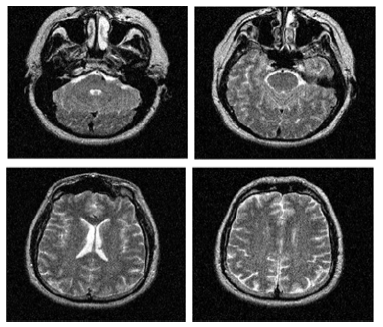
为了验证本文所提出的图像分割算法的性能, 与其他几种现有的图像分割算法进行了比较。参与比较的分割算法包括:1D Otsu和3D Otsu。测试图像来自哈佛大学脑部图像数据集(http://www.med.harvard.edu/aanlib/home.html)。测试图像包含4组, 如图5所示。
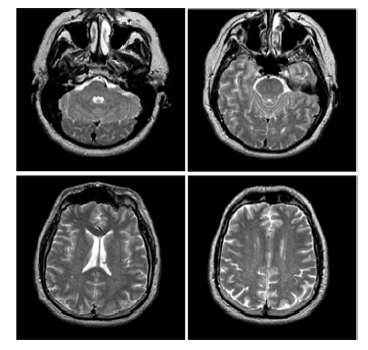 | 图5 本实验测试图像Fig.5 Test images in experiment |
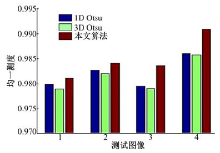
本实验中, 为了客观比较各分割算法的性能, 使用均一测度指标(uniformity)评估各分割结果[15, 17]。均一测度指标定义为:
式中:K表示分割的类别数; Num表示分割图像内包含像素的数量; f_max 、f_min 分别表示在原图像中的最大灰度值和最小灰度值; Rj表示第j个分割区域; fi为像素i的灰度值; μ j表示区域Rj的均值。均一测度指标的取值范围为[0, 1]。其中, u取值越大, 表明分割效果越好。
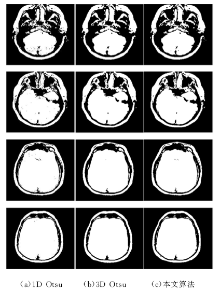
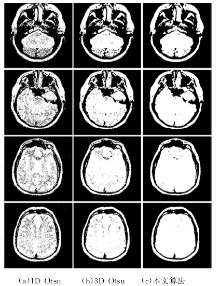
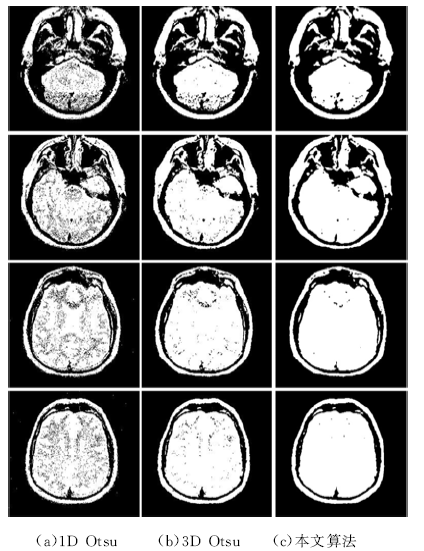
为了验证本文算法的有效性, 在Matlab R2009b环境下, 将1D Otsu、3D Otsu和本文方法进行实验对比, 实验中采用的测试图像如图5所示, 测试图像的尺寸均为256像素× 256像素, 灰度级为256。图6为三种分割算法的分割结果。
 | 图6 各分割算法在测试图像上的分割结果Fig.6 Segmentations of test images by segmentation algorithms |
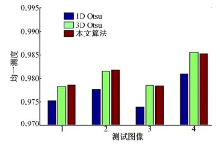
图7从定量的角度分析了上面的4组试验, 这里采用的定量指标为均一测度, 该指标越大, 说明分割的精度越高, 分割效果越好。该图验证了本文算法较前两种方法更有效。
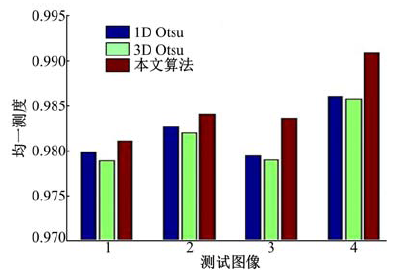 | 图7 图6中各分割图像的客观评价结果Fig.7 Objective evaluation of the segmented images in Fig.6 |
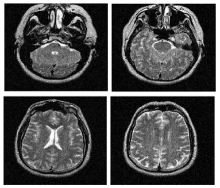
在实际应用中, 医学图像中经常或多或少地存在一些噪音。因此, 有必要检测本文算法对噪音的敏感性。本实验在图5所示的4幅测试图像中加入高斯白噪音(均值为0, 标准差为0.01), 分别得到4幅噪音图像, 如图8所示。利用噪音图像比较本文算法与其他两种算法对噪音的敏感性。
 | 图8 含噪音的测试图像Fig.8 Noised test images |
在噪音测试图像上, 1D Otsu, 3D Otsu以及本文算法得到的分割图像如图9所示。从图中可发现,
 | 图9 噪音测试图像的分割结果Fig.9 Segmentation results of noised test images |
1D Otsu得到的分割结果受到噪音的严重影响, 尤其是在软组织区域。相较于1D Otsu, 3D Otsu算法较好, 该算法因考虑了空间信息, 所以能够降低噪音对分割结果的影响。而本文算法得到的分割结果对噪音的鲁棒性更强, 从图像可以看出在软组织区域没有出现分割错误。
所有测试图像的最小灰度值均为0, 最大灰度值均为255。各个算法在噪音测试图像中的客观评价结果如图10所示。均一测度显示:本文算法整体上优于其他两个算法。
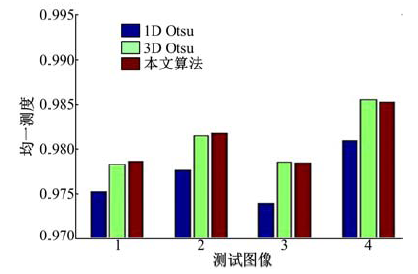 | 图10 图9中个分割图像的客观评价结果Fig.10 Objective evaluation result of the segmented images in Fig.9 |
针对图像分割中对噪音敏感的问题, 本文提出了一种新的基于高斯分解的阈值分割算法。该算法首先对图像进行高斯分解; 然后对图像的每个频段进行3D Otsu分割, 得到多个分割结果; 最后设计了一个分割结果的融合规则, 可将多个分割结果进行有效合并从而获得最终的分割结果。该算法在MR脑部图像上进行实验, 结果表明该方法能够有效降低噪声敏感度。经分析, 其原因在于本算法引入了高斯图像分解, 能够获得无噪声的图像频带, 保障最终的分割结果免受噪音的影响。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|