



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
增强型超声波周向旋转扫描节点参数优化
[朱海洋 , 张合, 马少杰]
, 张合, 马少杰]
, 张合, 马少杰]
|
|


作者简介:朱海洋(1989-),男,博士研究生.研究方向:无线传感器网络目标定位与跟踪.E-mail:njustzhu@163.com
无线传感器网络(WSN)节点具有的全向感知能力决定了网络覆盖性能,故先对增强型超声波传感器的尺寸和外形进行了优化仿真。仿真结果表明:优化后的号筒对超声波发射声场的指向性提升较为明显,在中心轴线上辐射的声压比普通传感器大3.5倍。然后利用增强型超声波传感器设计了单发单收超声波旋转扫描系统,建立了针对超声波测距的最高扫描转速模型,确定了扫描转速与超声波脉冲频率的匹配关系,并分析了该系统的目标捕获率。计算结果表明:超声波旋转扫描系统在具有较好匹配度的情况下,最高转速为215 r/min,可捕获速度低于64.5 km/h的目标。
Directional Sensor Network (DSN) node with stability of omnidirectional perception plays a decisive role in network coverage. Using the optimization method of SNOPT, the dimensions and shape of enhanced ultrasonic transducer were optimized first. With optimized horn the directivity was promoted obviously and the radiated sound pressure in the central axis was 3.5 times bigger than that of normal transducer. Then a new rotational circumferential scanning program of single-beam was designed based on the enhanced ultrasonic transducer. The model of the highest scanning speed for ultrasonic ranging was built, and the highest scanning speed of 253 r/min was achieved for monitoring the target in 6 m away. In order to get stabilized prospecting effect, the matching relationship between scanning speed and pulse frequency was established for constant number of ultrasonic beams in one scanning period. At last, target acquisition rate was analyzed. Calculation results demonstrate that the highest speed of the ultrasonic circumferential scanning system is 215 r/min in the case of good compatibility, which can acquire the target with a speed lower than 65.5 km/h.
无线传感器网络(WSN)中节点感知能力对网络覆盖性能的好坏起着决定性的作用[1, 2, 3]。节点感知模型可分为无向感知模型和有向感知模型[4, 5], 无向感知模型使用被动传感器[6], 具备全向感知能力, 但只可判断目标有无, 不能感知目标的距离和方位[7]。而有向感知模型往往采用主动探测方式, 具有一定的波束角, 能够识别目标的方位, 却无法对周边360° 范围进行覆盖。因此研究有向传感器的全向感知能力具有重要的意义。文献[8, 9]采用主动传感器阵列的方式进行全向感知, 文献[10, 11]利用有向传感器旋转扫描的方式进行全向感知, 旋转扫描方式在感知范围上等同于利用多个传感器组成的阵列, 但存在周期性的盲区。
本文基于增强型超声波测距技术, 采用旋转扫描的方式对周围360° 范围内的车辆目标进行探测。
超声波的束射性和反射特性使利用声波主动测距成为可能, 超声波的频率越大, 指向性就越好, 但在空气中衰减越严重, 无法实现远距离探测[12]。因此在设计超声波测距传感器时, 应选用较低的工作频率和较大的超声波换能器。对于共振频率为40 kHz, 辐射半径为6 mm的超声波探头, 有:
式中:θ 0 、θ -3dB分别为锐度角和波束角; λ 为超声波波长; a为换能器半径。
根据式(1)计算得锐度角
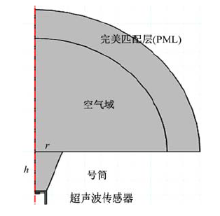
号筒作为增强声强的手段已经被广泛采用[13], 按照图1建立增强型超声波发射声场仿真模型, 空气域是半径为100 mm, 角度为90° 的扇形区域, 设置环形区域为完美匹配层(PML), 使空气域的边界无反射, 从而形成无限大的声场, 号筒部分高h=28 mm, 窄口半径为7.1 mm, 宽口半径为
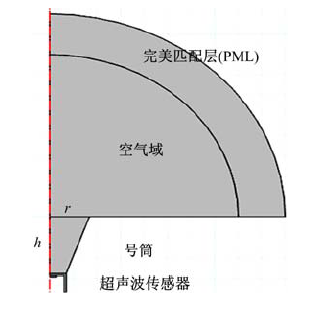 | 图1 增强型超声波发射声场仿真模型Fig.1 Simulation model of enhanced ultrasonic transmitting sound field |
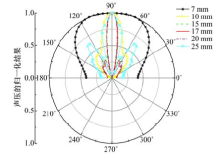
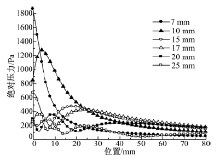
号筒优化的目的是使传感器辐射的声场在中心轴线上的能量更大, 而其余方向上的能量更小。宽口半径从7 mm变化到25 mm, 间隔1 mm。不同宽口大小的增强型超声波传感器的指向性和中心轴线上绝对声压比较如图2和图3所示。
 | 图2 不同宽口大小号筒的指向性比较Fig.2 Directional comparison of different horns |
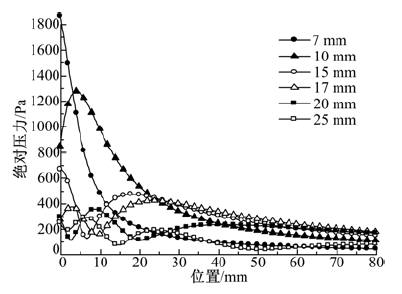 | 图3 不同宽口大小号筒的中心轴线声压比较Fig.3 Pressure comparison of different horns in central axis |
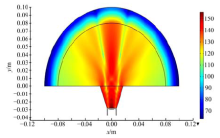
由图2和图3可知, 在号筒宽口半径为15~20 mm时, 超声波传感器的指向性较好, 其中心轴线上的绝对声压也是最高的。随着宽口半径缩小, 其指向性越差, 中心轴线上的绝对声压也越小; 随着宽口半径增大, 虽然在指向性上仍然具有较好的主瓣方向, 但旁瓣也随之增大, 导致其中心轴线上的绝对声压有所减小。则用h=28 mm, 窄口半径为7.1 mm, r=17 mm的锥形号筒为增强手段的超声波传感器发射声场分布如图4所示。图中的色条表示声压级, 单位为dB。
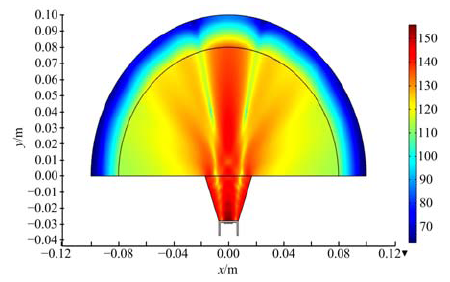 | 图4 增强型超声波传感器发射声场分布图Fig.4 Acoustic field distribution of enhanced transducer |
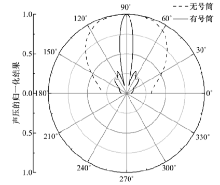
为了更加直观地区分出普通超声波传感器和增强型超声波传感器在性能上的优劣, 提取两80 cm处圆弧上的绝对压力, 并做归一化处理, 做出传感器的波束图, 如图5所示。
 | 图5 普通型与增强型传感器指向性比较Fig.5 Directional comparison of optimized transducer and normal transducer |
另外提取中心轴线上的绝对压力, 对比出声压的增幅, 如图6所示。
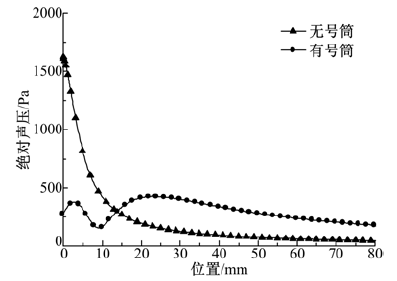 | 图6 普通型与增强型传感器轴线声压比较Fig.6 Sound pressure comparison of optimized transducer and normal transducer in central axis |
由图5可知, 有号筒的超声波传感器相比于无号筒的, 其指向性提升较为明显。由图6可知, 有号筒的超声波传感器中心轴线上的绝对声压比无号筒的大。取20~80 mm处两者的声压相除后取平均值, 则有号筒的传感器在中心轴线上辐射的声压比无号筒的大3.5倍。因此可以认为, 加上号筒的增强型超声波传感器的测距范围更大。
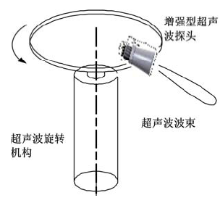
利用激光[14]、无线电波[15]的旋转扫描系统已经得到了广泛的应用, 但基于超声波的旋转扫描系统却很少在文献中出现。单发单收超声波周向扫描系统示意图如图7所示, 超声波探头使用加装号筒的增强型超声波传感器, 步进电机带动装有增强型超声波探头的平台进行旋转, 就可以对周围360° 范围内的目标进行探测。
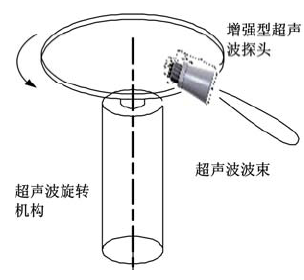 | 图7 超声波周向扫描示意图Fig.7 Schematic diagram of ultrasonic circumferential scanning |
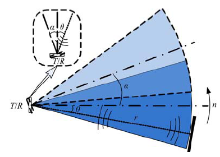
采用扫描方法会导致探测区域出现周期性的探测盲区, 这是周向扫描方案的固有缺陷。只有当扫描转速足够快, 才能有效地减小周期性探测盲区对探测性能的影响。然而当超声波测距传感器旋转扫描时, 发射超声波脉冲后, 测距传感器会旋转一定的角度, 导致接收回波变小, 测距范围也会相应地减小, 因此超声波周向扫描的转速受到一定的限制。超声波周向扫描接收回波示意图如图8所示。
 | 图8 超声波周向扫描接收回波示意图Fig.8 Schematic diagram of ultrasonic echo when rotational scanning |
根据上文仿真分析结果和实验所得数据可知, 增强型超声波测距传感器在静止条件下最远探测距离是10 m, 如图9中的虚线所示。超声波周向扫描转速为
式中:
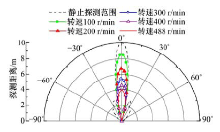
由式(3)可知, 根据不同的扫描速度, 每个方向上都对应一个最大探测距离, 由这些最大探测距离就可得出不同扫描速度下超声波测距传感器单次探测时的感知范围, 如图9所示。不同转速下单次探测的最远距离如图10所示。
 | 图9 不同扫描速度下单次探测的测距范围Fig.9 Distance measuring range in different scanning speed |
 | 图10 不同转速下0° 角最大探测距离Fig.10 Maximum range of 0° in different scanning speed |
由图9可知, 随转速的升高, 超声波测距传感器的探测范围不断减小。并且当转速大于488 r/min时, 在0° 附近的角度的最大探测距离会出现负值, 主要原因是0° 附近的角度可测距离较大, 因此往返时间较多, 导致超声波传感器在高转速下旋转的角度过大, 回波无法出现在接收视场中。因此应根据实际应用中的监控范围选择合适的扫描速度, 由图10可知, 当监控范围为周边6 m区域时, 超声波周向扫描转速应低于253 r/min。
由超声波周向扫描探测系统工作过程可知, 在一个扫描周期内, 会形成多条超声波声束构成周向声束场。由于增强型超声波波束角较小, 因此将声束简化为一条直线, 则一个扫描周期内的超声波声束如图11所示。
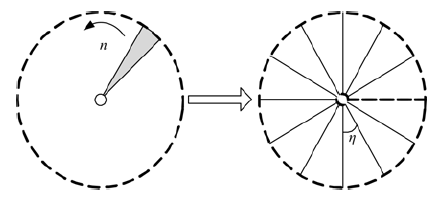 | 图11 一个扫描周期内的超声波声束Fig.11 Distribution of ultrasonic beam in one scanning period |
为保证每个扫描周期中的超声波声束数量相同且在固定角度
式中:
设最大监控距离为6 m, 超声波在空气中传播速度为344 m/s, 那么根据上文的计算结果
 | 图12 超声波扫描车辆探测示意图Fig.12 Schematic diagram of detecting vehicle with ultrasonic rotational scanning |
超声波周向扫描感知节点的车辆探测示意图如图12所示。超声波扫描机构旋转转速为
车辆经过监控区域的路线较多, 但是最有可能丢失目标的情况是车辆行驶轨迹只通过一条超声波声束, 那么车辆通过监控区域的时间t=l/v。为了能够捕获到目标, 必须在这段时间内保证超声波扫描机构完成大于等于一个周期的扫描, 即
本文基于增强型超声波测距传感器设计了单发单收旋转扫描系统, 量化了号筒对超声波传感器的增强效果, 并仿真优化号筒的尺寸和外形。增强型超声波测距传感器在波束的指向性和声音能量的聚集等方面获得较大的提升, 因此可以获得更大的测距范围。基于增强型超声波的声场分布, 对单发单收旋转扫描系统的主要参数进行了优化, 并利用优化结果计算出该系统的目标捕获率。在最大扫描转速为215 r/min时, 能够捕获速度小于64.5 km/h的目标, 若要监控更高速度或更小体积的目标时, 只需在旋转机构上添加额外的阵元。本文对增强型超声波周向旋转扫描系统的研究为超声波测距技术在有向传感器网络目标监控领域的应用提供了参考。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|