
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
双挂汽车列车高速阶跃横向失稳能量分析
[张义花 , 许洪国, 刘宏飞, 王发继]
, 许洪国, 刘宏飞, 王发继]
, 许洪国, 刘宏飞, 王发继]
|
|


作者简介:张义花(1987-),女,博士研究生.研究方向:多挂汽车列车横向稳定性.E-mail:zhangyihua1989@126.com
采用图论方法,并结合各个车辆单元的链接关系,得到了双挂汽车列车各个车辆单元3种可能的失稳顺序。基于TruckSim建立包括非线性轮胎模型的多体动力学双挂汽车列车模型,通过仿真高速阶跃响应下各个车辆单元状态变量的变化趋势,可知侧倾角速度是影响车辆失稳的首要因素。结合能量方程求解不同车速下各个车辆单元在阶跃响应中的最大能量,得到了各个车辆单元的失稳顺序,同时对图论法中提出的失稳顺序进行了验证和能量分析。
Three possible instability sequences in vehicle combinations were obtained by using graph theory and the link relationship of each unit of the vehicle. A multi-body dynamic model, including nonlinear tire model of the vehicle combination was established by TruckSim. By simulation of the change of the state variables of each vehicle unit under high-speed step response, it was obtained that the main factor to influence the instability of the vehicle is the roll rate. Combining with the energy equation, the maximum energy of each vehicle unit under different vehicle speed was calculated, and the instability sequence of the vehicle units was obtained. Meanwhile, verification and energy analysis were carried out for the sequence of possible instability obtained by graph theory.
双挂汽车列车由牵引车、两个半挂车及一个拖台组成, 国外称为A-Double[1]。双挂汽车列车具有运载量大、运输效率高、成本低等优势, 在欧洲、美洲等地区得到了广泛应用[2, 3]。但由于车身长、铰接点多、质心高等结构特点, 多挂汽车列车常表现出横向甩尾、折叠、侧翻等危险失稳形式[4]。因此, 国外相关专家和学者对多挂汽车列车的稳定性进行了长期的研究。
Fancher等[5, 6, 7]分别研究了重型汽车列车的铰接点数、各单元轴数以及轮距对横向稳定性的影响。在铰接点数目方面, van de Molengraft-Luijten等[8]通过对欧洲多种铰接点数目不同的汽车列车类型进行分析, 得到增加铰接点数目会导致汽车列车横向稳定性下降的结论。Aoki等[9]通过分析各轴数对多挂汽车列车的横向稳定性影响, 得到增加拖台的轴数可提高行驶稳定性的同时减小轨迹偏移量。de Almeida等[10]和Barbieri等[11]分别对重型车辆中悬架的个数和不同悬架结构进行了研究, 并分别在典型行驶工况下进行仿真以评价重型车辆的横向及侧翻稳定性。Tabatabaei等[12]分析了轮胎侧偏刚度对重型车辆的影响, 得到牵引车后轴轮胎侧偏刚度减小会使得车辆折叠, 半挂车后轴轮胎侧偏刚度减小易发生挂车甩尾的结论。在多挂汽车列车的横向稳定性控制方面, 主要有基于挂车主动转向[13, 14]和主动制动[15]的控制策略。在这些关于汽车列车的稳定性研究中, 缺乏对高速行驶中双挂汽车列车横向失稳能量转化的分析, 因而无法判断各个车辆单元的失稳顺序。
双挂汽车列车的失稳与各个车辆单元的链接方式密切相关, 利用图论方法获得各个车辆单元三种可能的失稳顺序; 通过Trucksim软件建立双挂汽车列车的多体动力学模型, 仿真不同车速下汽车列车各个单元的状态变量变化; 根据能量方程, 计算和分析不同车速下阶跃转向时各个车辆单元的最大能量, 从而对各个车辆单元的横向失稳顺序进行验证, 同时揭示双挂汽车列车横向失稳的发生机理, 为提高多挂汽车列车的行驶安全性奠定基础。
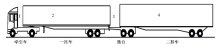
本文所研究车型如图1所示, 其中“ 1, 2, 3, 4” 分别代表牵引车、一挂车、拖台和二挂车。利用图论方法, 将4个车辆单元看作4个点, 根据各点之间的链接方式不同, 得到式(1)。
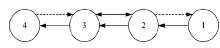
根据式(1)可画出各个车辆单元的相互作用(见图2)。式(1)中
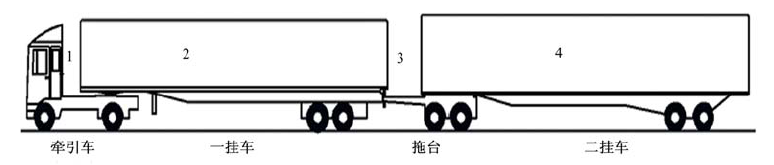 | 图1 双挂汽车列车示意图Fig.1 Vehicle combinations diagram |
由图2可知, 能量在各个车辆单元之间相互作用, 从而得到双挂汽车列车可能的失稳顺序为:Ⅰ (2-3-4-1)、Ⅱ (3-4-2-1)和Ⅲ (4-3-2-1)。
 | 图2 各个车辆单元相互作用图Fig.2 Interaction diagram of each vehicle unit |
在3种失稳顺序中, 首先失稳的车辆单元是引起整车发生危险的第一要素, 为了分析双挂汽车列车各种失稳形式, 必须构建车辆模型, 并进行不同车速下的仿真试验, 以验证本文失稳形式的合理性和正确性。
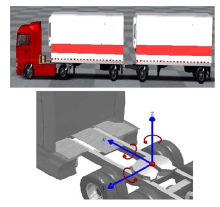
根据多体动力学软件TruckSim分别建立非线性轮胎模型、钢板弹簧非独立悬架模型以构建双挂汽车列车模型, 鉴于各个车辆单元中各轮胎的载荷不同, 选用数据时分别选择了不同的轮胎模型, 分别如图3和图4所示。双挂汽车列车的结构参数见表1。另外, 在TruckSim软件中, 选择“ 2A Euro Cab Over” 的牵引车, 一、二挂车选择相同的“ 1A Van Trailer 10T for Doubles” , 拖台选择了“ 1A Dolly 10T” 。在两个挂车载荷选择中, 选定“ Dump Trailer Payload” , 并设定20 t载荷模型。路面模型选择附着系数为0.85的良好路面。
| 表1 双挂汽车列车模型参数 Table 1 Vehicle combinations model parameters |
 | 图3 各个车辆单元非线性轮胎模型Fig.3 Nonlinear tire models of each vehicle unit |
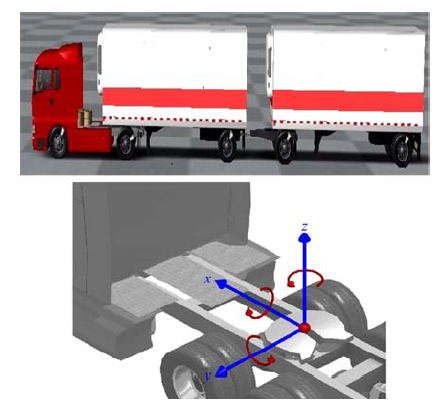 | 图4 双挂汽车列车模型及坐标系Fig.4 Vehicle combinations model and coordinate system |
车辆的行驶过程是一个将能量不断转化及耗散的过程, 发动机的机械能最终转化为车辆的动能并且在此过程中部分热能被耗散。因此, 车辆单元的能量方程如下:
式中:m为质量; u为纵向速度; v为侧向速度; Ix 、Iy 、Iz 分别为沿x、y、z方向的转动惯量; ω x 、ω y 、ω z 分别为侧倾、俯仰以及横摆角速度, 由于车辆产生的热能耗散相对较小, 本文中忽略Q
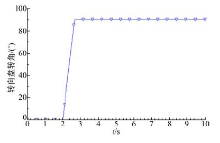
为研究高速阶跃下汽车列车横向稳定性, 选定双挂汽车列车车速为90 km/h时进行阶跃输入下的仿真, 并根据多次仿真结果及分析, 设定转向盘转角为90° (见图5)。获得纵向速度、侧向速度、侧倾角速度、俯仰角速度以及横摆角速度的变化。其中“ Unit 1、Unit 2、Unit 3、Unit 4” 分别代表牵引车、一挂车、拖台和二挂车。
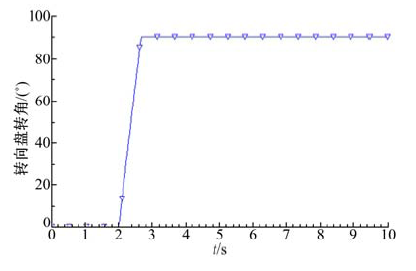 | 图5 转向盘阶跃转向Fig.5 Step response of steering wheel angle |
由图6可知, 4个车辆单元的纵向速度同步下降, 这是因为车辆在角阶跃转向过程中, 将部分纵向动能转化成了侧向动能以及被轮胎与地面之间的摩擦消耗掉。
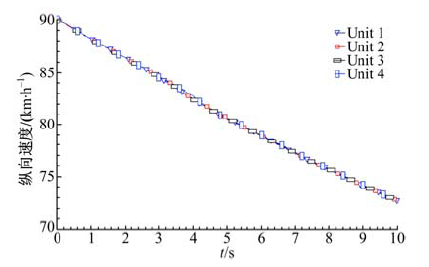 | 图6 各个车辆单元纵向速度响应Fig.6 Step response of longitudinal velocity of vehicle units |
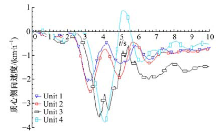
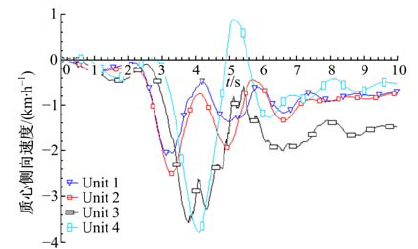 | 图7 各个车辆单元质心侧向速度响应Fig.7 Step response of lateral velocity of vehicle units |
由图7可知, 二挂车的侧向速度变化最大, 其次为拖台, 这是因为在高速行驶中, 拖台与二挂车组成的整体与一挂车是牵引环连接, 该种连接形式不同于鞍座连接, 而使后面两个车辆单元侧向速度增加明显。
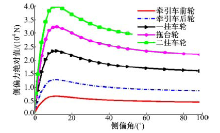
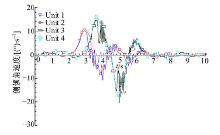
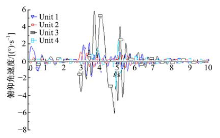
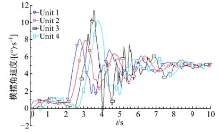
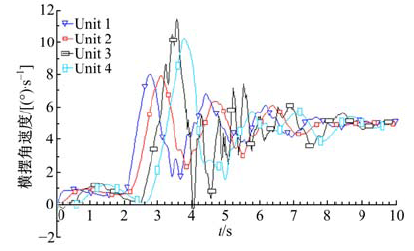
对比图8~图10中各个方向的角速度变化可知, 侧倾角速度变化最大, 其次为横摆角速度, 俯仰角速度变化最小。因此, 选择各个车辆单元侧倾角速度首次达到峰值时为观察点, 则牵引车单元的侧倾、俯仰和横摆角速度对应的值为10.3、0.11、7.5 (° )/s; 一挂车对应3个方向的角速度为11.13、0.85、7.1 (° )/s; 拖台对应3个方向的角速度为14.63、1.54、11.12 (° )/s; 二挂车对应3个方向的角速度为16.1、0.53、8.84 (° )/s。因此, 俯仰角速度变化对车
 | 图8 各个车辆单元侧倾角速度响应Fig.8 Step response of roll rate of vehicle units |
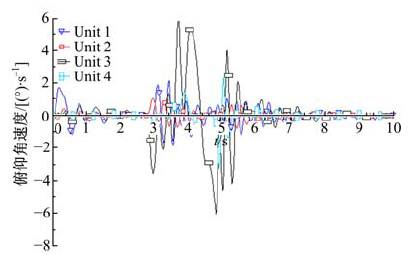 | 图9 各个车辆单元俯仰角速度响应Fig.9 Step response of pitch rate of vehicle units |
 | 图10 各个车辆单元横摆角速度响应Fig.10 Step response of yaw rate of vehicle units |
辆行驶稳定性基本没有影响, 侧倾角速度和横摆角速度是影响车辆失稳的关键因素, 且由于拖台和二挂车的侧倾角急剧变化, 整车此时达到临界侧翻失稳的状态。
综合仿真分析结果, 以侧倾角速度首次出现峰值时对应的时刻作为其余状态变量的取值的基准, 通过单位换算, 并利用式(2)的能量方程, 计算同一转向盘转角下不同高速行驶的各个车辆单元对应的最大能量值, 如表2所示。
| 表2 各个车辆单元不同车速下的能量对比 Table 2 Energy contrast of each vehicle units at different speed J |
由表2可知, 同一转向盘转角下, 随着车速的增加, 各个车辆单元的状态变量变化剧烈程度增加, 表现为能量的数值增大。不同车速下的车辆单元在侧倾角速度首次达到峰值时, 一挂车的能量最大, 其次是二挂车, 拖台能量最小。但由于拖台与二挂车组成的整体与一挂车的链接形式特殊, 可将两个车辆单元看作一个整体。同时, 拖台和一挂车直接相连, 所以可以得到失稳的先后顺序为Ⅰ (2-3-4-1)。因此, 双挂汽车列车高速角阶跃响应下, 一挂车由于能量最大而首先出现临界失稳状态, 并通过铰接点将能量传递给拖台和二挂车, 最终导致整车发生折叠或者侧翻失稳。
在第二种可能失稳的顺序(3-4-2-1)中, 根据表2可知, 拖台的能量相比其余三个车辆单元很小, 因此这种失稳顺序不存在。在第三种失稳顺序(4-3-2-1)中, 对比车速分别为70 km/h和80 km/h两种情形可知, 一挂车与二挂车的能量差距较小, 在其他典型行驶工况下, 可能出现甩尾或侧翻失稳, 这将在以后的研究中进行验证。
(1)侧倾角速度对车辆稳定性影响最大, 其次为横摆角速度, 俯仰角速度对车辆稳定性影响基本可以忽略。
(2)随着车速的增大, 各个车辆单元的状态变量变化剧烈, 表现为能量增大。
(3)高速阶跃响应过程中, 双挂汽车列车的失稳顺序为Ⅰ (2-3-4-1)。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|