



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于模糊控制功率分流式混合动力客车控制策略
[王伟1  , 王庆年
, 王庆年2 , 田涌君1 , 王仁广1 , 温泉1 ]
, 王庆年|
|


作者简介:王伟(1981-),男,高级工程师,博士.研究方向:混合动力驱动理论与控制.E-mail:wangwei5603@sina.com
针对开发的双行星排式混合动力系统,选取超级电容作为唯一的电源储能器,对超级电容进行选型和参数匹配。基于模糊控制理论和整车燃油经济性目标,提出了发动机最优曲线的控制策略并给出了具体实施的方法。为验证控制策略的实际控制效果,样车进行了台架试验,测试结果表明:在典型综合城市工况下,发动机工作点按照目标曲线运行,克服了传统PI控制中发动机转速波动大、油耗高的缺点,使用模糊控制算法的整车综合油耗为21.44 L/100 km,相比传统PI控制算法节油率提高了4.88%。
For a developed dual-planetary hybrid system, the supper capacitor was selected as the only power resource and the parameters of ultra capacitor were matched. Based on fuzzy control theory and the target fuel economy, the optimal curve of the engine control strategy was proposed and the concrete implementation method was given. To verify the actual effect of the control strategy, a trial bus was tested on the bench. The results show that in a typical city driving cycle, the engine working points are highly accorded to the target curve and overcome the problems in traditional control, such as engine speed fluctuation and high fuel rate. The fuel consumption of fuzzy control algorithm of the vehicle is 21.44 L/100 km. Compared with the traditional PI control algorithm, the economizing rate increases 4.88%.
双电机混合动力构型已经成为国内外混合动力公交车的发展方向。然而, 深度混合的公交车电功率所占比重较大, 对储能系统、电机及其变频系统提出了更高的功率要求。超级电容可以频繁地大电流释放能量脉冲而不会产生效率衰减, 能量储存过程中基本不产生化学反应, 具有超长的寿命[1]。因此, 从混合动力公交车推向市场的角度来分析, 搭载超级电容的深度混合公交车是产业化前景最好的方案之一。将深度混合动力总成和超级电容器这两种高效率的系统有机结合, 开发出适合两者的能量管理策略是目前需要迫切解决的问题[2, 3, 4]。
文献[5]对双行星排复合功率分流乘用车的驱动模式切换做了建模分析和仿真, 但系统动力源采用的是常规动力电池。文献[6]对双模式电机复合无极传动系统功率分流特性进行了功率损失最小的模型计算和仿真, 但没有使用算法对车辆的经济性能进行优化。文献[7]对双电机行星齿轮变速箱进行了运行学分析和参数匹配, 但是没有对控制策略进行优化分析。文献[8]对双离合器、单轴并联ISG电机结构的电容式混合动力轿车的控制策略进行了推导和分析, 优化了发动机和电机转矩分配, 但是动力总成系统不是行星排变速箱构型。
基于上述分析, 本文针对中国汽车技术研究中心开发的双行星排功率分流动力总成平台, 选取超级电容作为唯一的电源储能器, 对超级电容进行选型和参数匹配。基于模糊控制理论和整车燃油经济性目标, 提出了发动机最优曲线控制策略, 试制样车进行了台架试验, 克服了传统控制中发动机转速波动大、启停次数频繁的缺点, 获得了良好的燃油经济性。
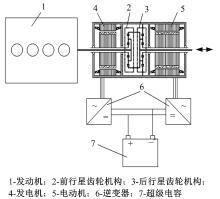
双行星排混合动力总成系统主要使用下述方案:发动机的输出端连接前行星齿轮机构的行星架, 前行星齿轮机构的齿圈连接后行星齿轮机构的行星架, 前行星齿轮机构的太阳轮连接发电机, 发电机和电动机经逆变系统连接超级电容, 电动机连接后行星齿轮机构的太阳轮, 后行星齿轮机构的齿圈固定在机壳上, 后行星齿轮机构的行星架上设置有用于车辆的动力输出接口, 如图1所示[9]。
双行星排混合动力总成具有动力耦合、自动变速和自动离合三大功能, 能够实现自动变速器(ECVT)的功能, 集成度非常高, 便于在汽车上布置和安装, 其在整车上的布置如图2所示。
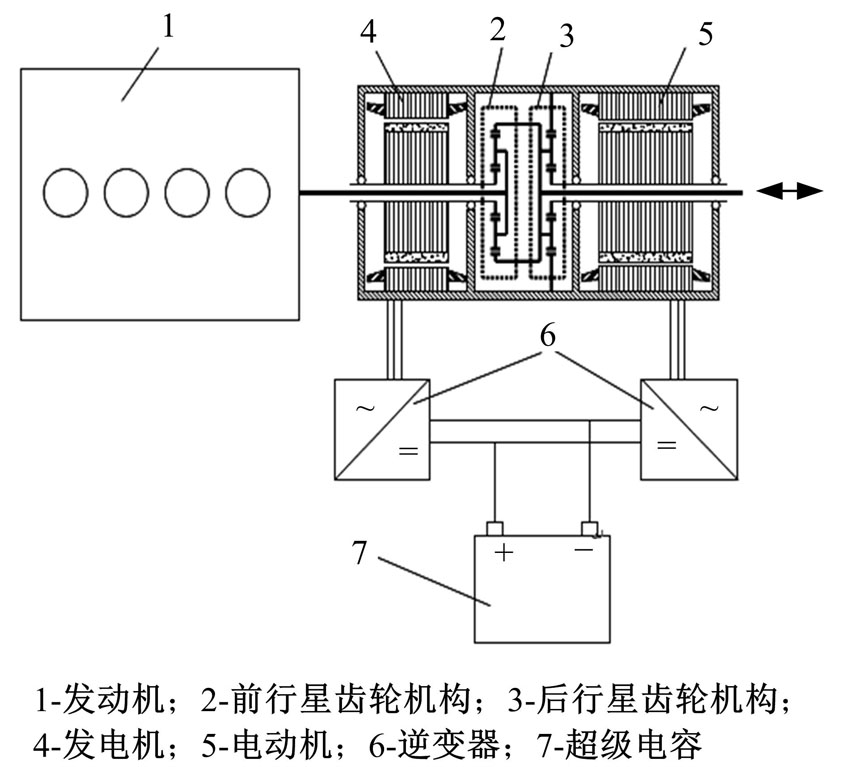 | 图1 系统结构图Fig.1 System construction drawing |
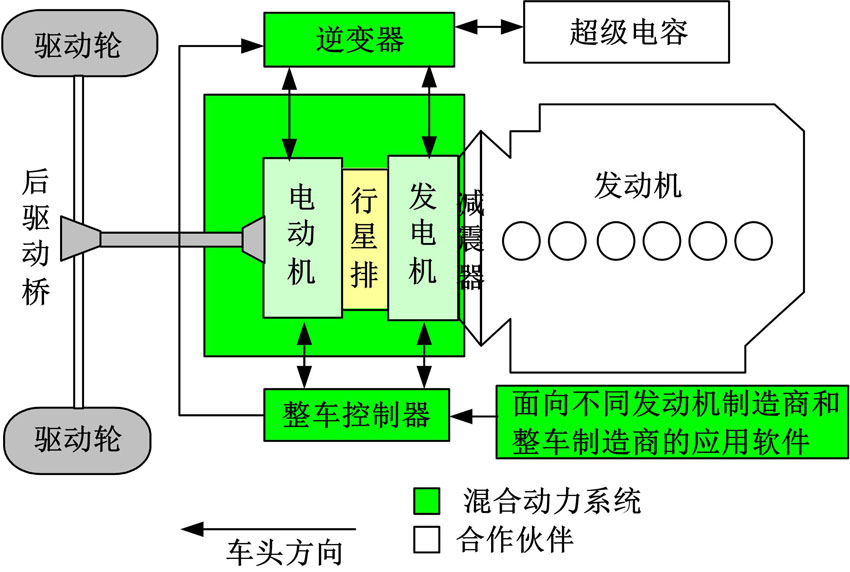 | 图2 混合动力总成整车布置图Fig.2 HEV assembly vehicle layout |
选用BMOD0165的超级电容模块作为总成的动力源, 其单个模块由18个超级电容单体串联组成, 模块额定电压为48.6 V, 电能为52.8 W· h, 最大功率(1 min)为1000 kW。
超级电容参数匹配主要考虑电压等级、功率要求、容量, 动力总成电机基本参数如下。电动机:额定转速为1700 r/min; 额定功率为84 kW; 峰值功率为147 kW; 额定转矩为400 N· m; 峰值转矩为700 N· m; 电压等级为510 V。发电机:额定转速为1700 r/min; 额定功率为44.5 kW; 峰值功率为71.2 kW; 额定转矩为250 N· m; 峰值转矩为400 N· m; 电压等级为510 V。
(1)电压等级要求
驱动电机的电压平台是510 V, 电机工作的电压范围为250~650 V。超级电容器最高电压要高于驱动电机的最高电压, 因此超级电容的最高电压至少大于650 V。
根据选择的超级电容的型号, 可以确定电容的模块数n:
式中:Vmax为驱动电机最高电压; Vuc_module为超级电容模块端电压。
(2)功率要求
整车电动行驶时, 电容要能满足加速时电机驱动整车的功率要求。即超级电容的输出功率要大于所选择驱动电机的功率。
式中:Puc为电容峰值功率; η b为电容转换效率; Pmmax为电机峰值功率。
(3)容量要求
式中:Euc为电容总容量; Euc_module为单个电容模块的容量。
综合式(1)(2)(3)可以得出, 超级电容确定为14块串联方案, 总容量为0.739 kW· h。因此, 选用的超级电容模块可用能量为0.49 kW· h, 按照整车0.5 kW· h电量行驶1 km来计算, 能量足够满足车辆纯电动起步行驶的要求。
搭载双行星排混合动力总成的客车具有3个动力源, 通过合理控制3个部件的工作状态可以实现车辆不同运行模式, 如表1所示。
| 表1 整车工作模式 Table 1 Vehicle operate mode |
在车辆的行驶过程中, 利用混合动力汽车的节能机理, 充分发挥设计方案的节能潜力, 达到整车在燃油经济性和排放等方面的目标性能。开发能量管理策略的目标是尽量地使各部件的工作点都落入高效率区, 保证系统综合发挥出最优效率。
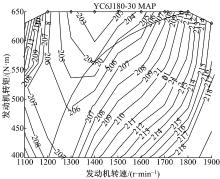
鉴于发动机的目标工作区域是直接影响燃油经济性的主要因素之一, 因此设计以发动机工作点优化控制为主要优化目标。在考虑动力总成部件约束条件的前提下, 将发动机控制在理想工作曲线[10, 11, 12], 如图3所示。
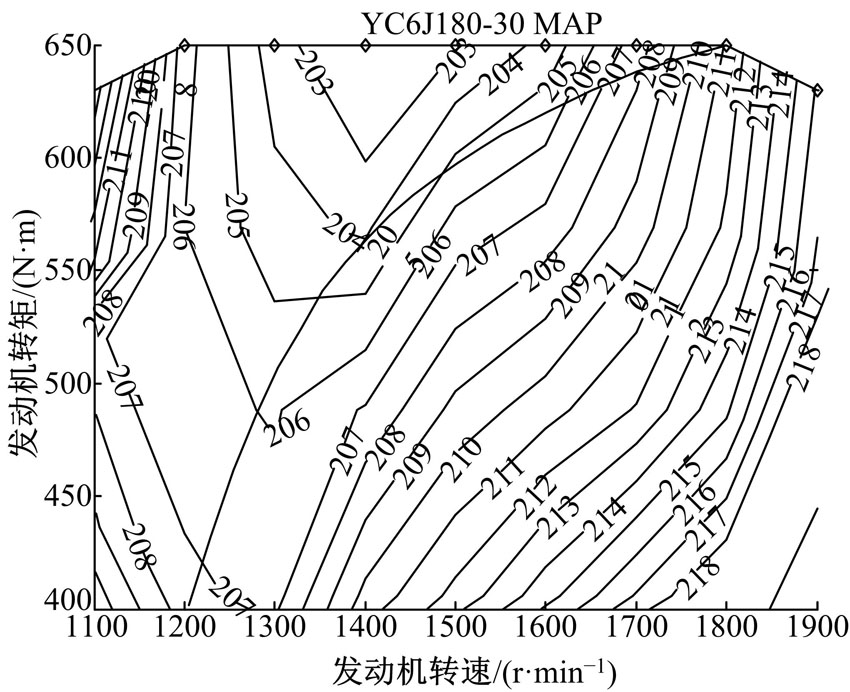 | 图3 发动机MAP图Fig.3 Engine map figure |
(1)行星排运动学关系[7]:
式中:ω S、ω R、ω c分别为太阳轮、齿圈和行星架的角速度; K为行星轮系的特征参数, 即太阳轮与齿圈的模数比; TC为行星架转矩; TS为太阳轮转矩。
(2)各动力源执行器自身特性, 主要考虑功率的约束条件
式中:Tm、Tmotor、Treq分别为电机转矩、电机驱动转矩、电机发电转矩; Preq、PEng_max、PEng_min分别为整车需求功率、发动机最大功率、发动机最小功率。
当需求功率大于发动机最大功率时, 电动机以电动状态工作提供驱动力弥补功率差值; 而当需求功率小于发动机最小功率时, 电动机以发电状态运行, 将多余能量暂存在超级电容中。
(3)驱动电机、发电机峰值功率限制和外特性限制
式中:Tmax、Tmin分别为驱动电机最大转矩、最小转矩; Gm、Gmax、Gmin分别为发电机转矩、发电机最大转矩和发电机最小转矩。
(4)行星排动力总成具有两个自由度, 电动机工作点与车速耦合, 发电机工作点可调。但是考虑发电机在300 r/min以下时, 控制精度较低, 因此将发电机转速Gspeed边界设置在300 r/min以上。
式中:Gspeedmax为发电机最大转速。
综合上述优化目标和约束条件, 图4给出了控制系统的实现流程。车辆功率需求与电容能量状态调节功率需求、电动附件功率需求构成了系统的总功率需求, 该功率需求通过发动机和电动机共同实现。考虑发动机非理想特性约束条件, 对该功率需求施以速率限制, 然后通过查表获得期望发动机工作转速。
图4中最大允许发动机工作转速主要受发电机最高转速和对应的转矩限制, 最小允许发动机工作转速受限于式(7), 两个约束数值都是通过计算查表进行。
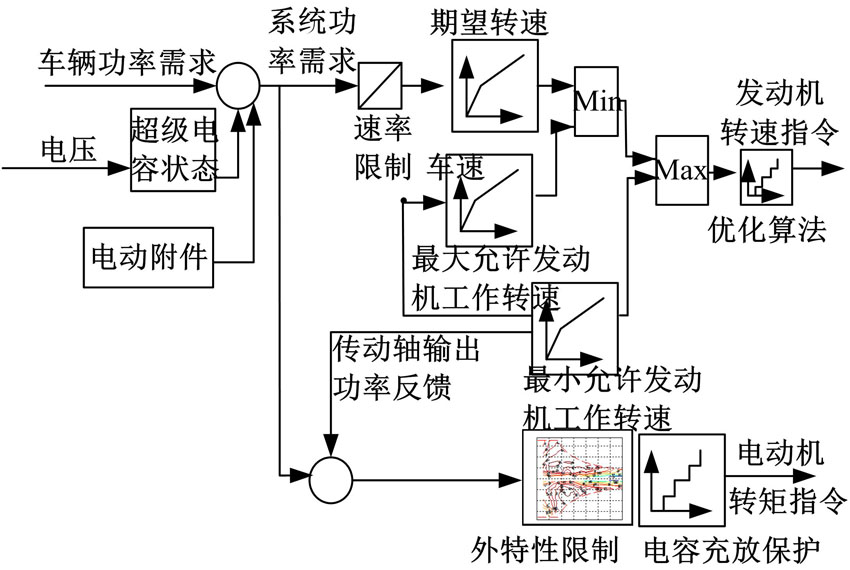 | 图4 控制流程图Fig.4 Flow chart of control process |
由于动力部件的转速转矩双解耦, 需引入传统PI算法实现对发动机转速的控制。控制对象发动机存在严重非线性, 如何调节控制参数显得非常困难。本文利用发动机试验台架针对最优工作曲线上的每个点或者每隔一个功率区间进行调试, 得出了发动机最优工作曲线下的各个功率的PI参数。但是传统PI调节方式获取的某一状态下在调节时是针对一个区间逐个进行调试, 区间内工作点的控制参数没有直接获取, 而是采用线性差值的方法代替, 无法保证整PI参数在区间内获得良好的控制效果。
模糊控制具有鲁棒性强、实时性好、不依赖于精确模型的优点, 是一种极具推广应用前景的控制算法, 非常适合混合动力汽车复杂模型的控制。因此, 本文将模糊控制与传统PI算法结合, 克服传统PI的不足, 实现PI算法的优化[13, 14, 15]。
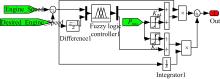
为了使发动机工作点具有良好的适应性和估算精度, 引入模糊控制算法实现PI参数查表的连续化, 选用的模糊控制器为双输入双输出系统, 输入分别为发动机的实际转速与发动机目标转速差值Δ E及差值的变化率Δ EC, 输出为修正的比例常数Δ Kp和积分常数Δ Ki, 模糊PI控制器在系统中的运用情况如图5所示。
 | 图5 模糊PI转矩控制Fig.5 PI fuzzy torque controller construction diagram |
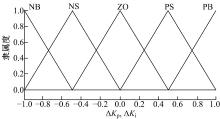
进一步地, 将Δ E分为5个模糊子集:{NB、NS、ZO、PS、PB}, 论域定为[-50, 50]; Δ EC分为5个模糊子集:{NB、NS、ZO、PS、PB}, 论域定为[-100, 100]; Δ Kp分为5个模糊子集:{NB、NS、ZO、PS、PB}, 论域定为[-1, 1]; Δ Ki分为5个模糊子集:{NB、NS、ZO、PS、PB}, 论域定为[-1, 1]; 输入和输出变量隶属度函数如图6、图7所示。推理方法采用Mamdani型, 去模糊化采用加权平均法。
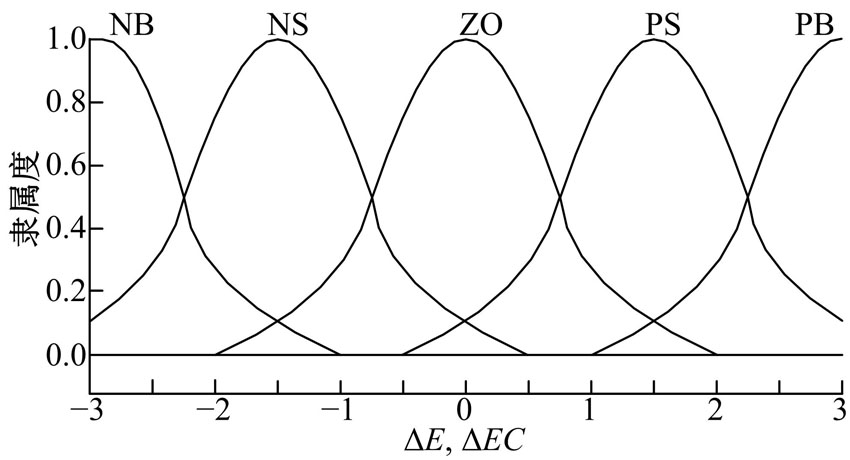 | 图6 Δ E和Δ EC的隶属度函数Fig.6 Membership function of Δ E and Δ EC |
 | 图7 Δ Kp和Δ Ki的隶属度函数Fig.7 Membership function of Δ Kp and Δ Ki |
根据专家经验, 基本规则描述如下:
(1)如果差值为负值, 说明发动机实际转速大于发动机目标转速, 应当减小PI补偿, 发动机转速回落。若此时差值的变化率亦为正值, 说明偏差在继续变大, PI补偿应当适当再次减小。反之, PI补偿应当增加。
(2)如果差值为零, 说明发动机实际转速与发动机目标转速相同, PI补偿不需要介入。若此时差值的变化率有变化的趋势, PI补偿大小与差值变化率的变化方向相反。
(3)如果差值为正值, 说明发动机实际转速小于发动机目标转速, 应当加大PI补偿, 发动机转速上升。若此时差值的变化率亦为正值, 说明偏差在继续变大, PI补偿应当适当再次加大。反之, PI补偿应当减小[11, 12, 13]。
基于上述原则, 本文设计的模糊转矩控制器控制规则如表2、表3所示。
| 表2 Δ Kp模糊控制规则表 Table 2 Δ Kp fuzzy control rule |
| 表3 Δ Ki模糊控制规则表 Table 3 Δ Ki fuzzy control rule |
样车在中国汽车技术研究中心重型转鼓台架上进行了测试[16], 验证开发的整车能量管理策略, 对比分析了基于模糊规则控制和基于PI控制的发动机工作点的分布区域, 同时测试城市综合循环工况的整车燃油经济性。图8为试验样车在中国典型城市工况运行的照片, 整车参数如下:底盘型号为CA6120CRHEV; 整车尺寸为11 990 mm× 2550 mm× 2350 mm; 轴距为6100 mm; 前、后轮距分别为2050、1847 mm; 迎风面积为6.5 m2; 整备/最大总质量为10 800/18 000 kg; 后桥速比为4.875; 轮胎规格为275/70R 22.5。
 | 图8 整车台架试验Fig.8 Vehicle bench test |
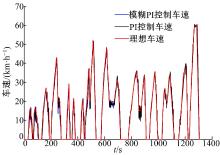
图9为典型城市工况车速跟随曲线, 图中红色实线为目标车速, 蓝色实线为传统PI控制下实际车速, 黑色实线为模糊PI控制下实际车速。3条曲线基本吻合在一起, 车速能满足行驶工况需求。
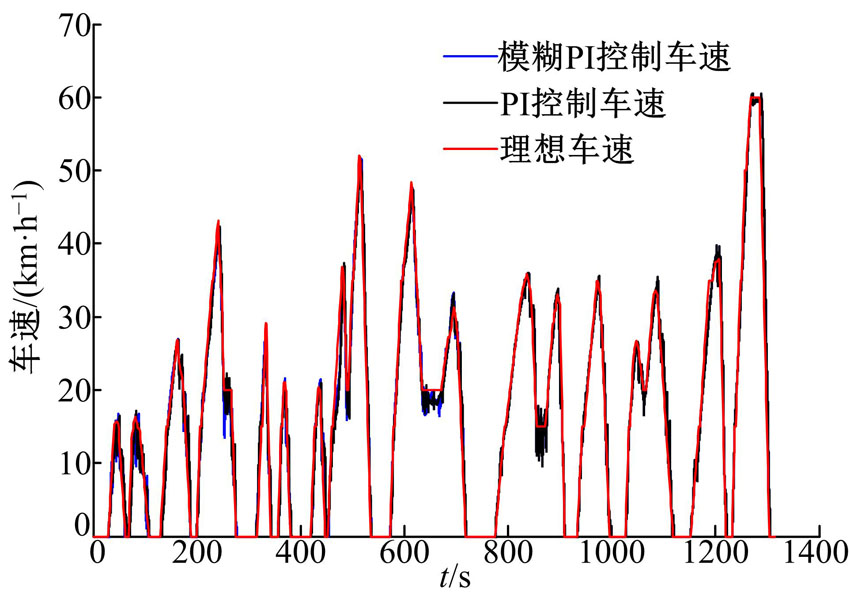 | 图9 中国典型城市循环工况车速曲线Fig.9 Velocity curve of China typical city cycle condition |
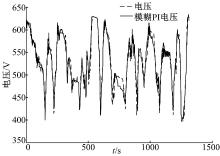
图10为超级电容的工作电压曲线, 在工况的测试过程中, 超级电容电压波动正常, 没有出现电压过高或者过低的故障, 所选电容的方案和参数满足整车行驶需求。
 | 图10 电压变化曲线图10 Voltage change curve |
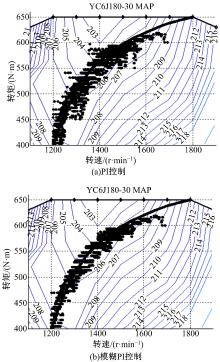
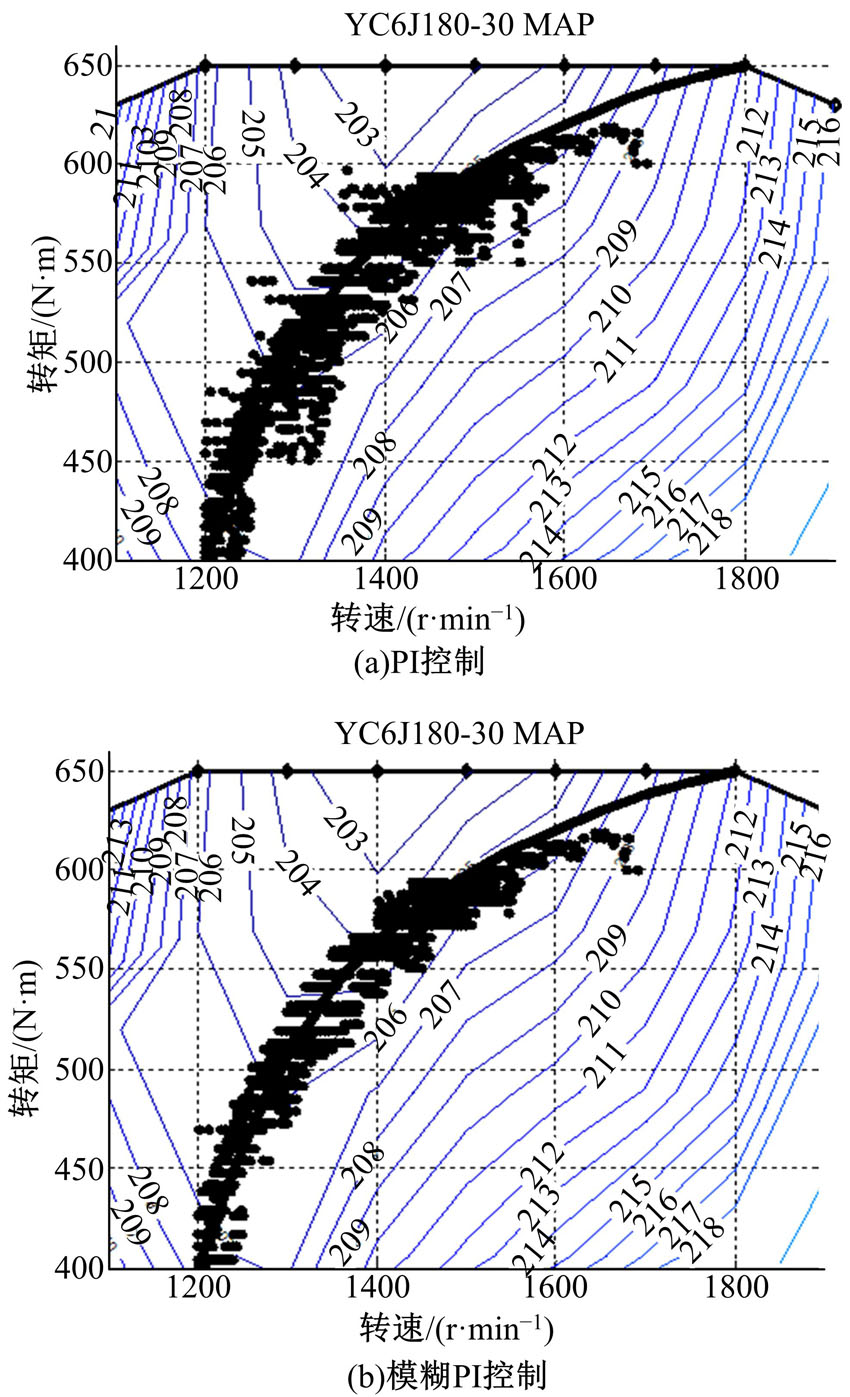 | 图11 发动机工作点分布图11 Engine operating points distribution |
图11为发动机工作点的分布情况。图11(a)(b)分别为采用传统PI控制和模糊PI控制的发动机最优曲线。对比两图可知, 在传统PI控制下, 虽然发动机能够被控制在理想工作线附近, 但仍然存在部分偏离的点, 阻碍了系统效率的进一步提升。这是由于PI参数不够完善, 导致发动机在实际工作过程不能及时地跟随目标曲线, 产生了波动。而基于模糊PI后, 发动机转速在1300 r/min到1500 r/min区域, 模糊修正了PI参数, 发动机工作点的超调量得到较为明显的抑制, 波动情况改善, 工作点更加靠近目标曲线, 验证了模糊PI对发动机工作点调节的优越性。
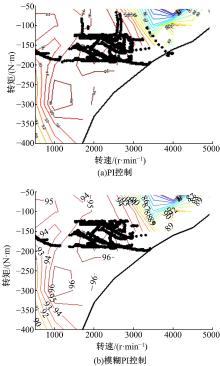
 | 图12 发电机工作点图12 Generator operating points |
图12为发电机工作点的分布情况。对比图12(a)(b)可以发现, 采用了模糊PI控制后发电机工作点更加稳定, 有效地集中在高效区域内。由于发动机转速起到对发电机转矩修正的作用, 而采用模糊PI控制后, 发电机转速跟随及时, 因而发动机工作点会更加稳定。
表4中为两组不同控制方法的燃油经济性对比, 验证了模糊PI对发动机工作点调节的可行性及改善油耗的作用。
| 表4 整车台架油耗测试结果 Table 4 Vehicle bench oil consumption test results |
相比传统PI控制, 采用模糊规则PI控制算法的车辆整车燃油经济性得到进一步的提升, 节油率提高大约4.88%。
(1)以超级电容作为唯一储能器并且搭载双行星排动力总成的12 m公交车可以满足整车的行驶需求, 实现了电动机、发电机、发动机和电容协调工作。
(2)开发的基于模糊控制PI调节发动机目标曲线的算法效果明显, 在典型综合城市工况下, 发动机工作点按照目标曲线运行, 克服了传统控制中发动机转速波动大的缺点, 提高了整车燃油经济性, 使用模糊控制算法的百公里综合油耗为21.44 L/100 km, 相比传统PI控制算法节油率提高了4.88%。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|