






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
驾驶员无意识车道偏离识别方法
[高振海 , LeDinhDat, 胡宏宇, 孙翊腾]
, LeDinhDat, 胡宏宇, 孙翊腾]
, LeDinhDat, 胡宏宇, 孙翊腾]
|
|


作者简介:高振海(1973-),男,教授,博士生导师.研究方向:汽车驾驶辅助系统,无人驾驶与驾驶行为分析.E-mail:gaozh@jlu.edu.cn
为了改进车道偏离预警系统的工作效能,本文提出了考虑人-车-路特性的无意识车道偏离识别方法。首先,明确了无意识车道偏离识别的具体含义,将其划分为疲劳车道偏离和次任务车道偏离;其次,利用受试者工作特性曲线(ROC)确定无意识车道偏离的识别时间窗口,保证了无意识偏离样本筛选的有效性;再次,以12名驾驶人为试验对象,采集并对比分析了驾驶员操纵特性、车辆运动状态和车辆与车道线相对运动状态等相关参数,并分别选取作为疲劳车道偏离和次任务车道偏离识别基本特征;最后,采用高斯混合隐马尔科夫模型(GM-HMM)构建无意识车道偏离识别模型。实验结果表明,本文方法具有较好的识别效果。
In order to improve the performance of lane departure warning system, an unintentional lane departure analysis method is proposed. This method combines the driver's operation characteristics, vehicle's motion characteristics and the relationship between the vehicle and the lane. First, the unintentional lane departure is classified into two parts: lane departure by fatigue and lane departure by secondary task. Then, experiments of unintentional lane departure are carried out through the co-simulation platform based on CarSim and LabWIEW. Twelve drivers of different genders, proficiencies and driving behaviors are selected to participate the experiments. The unintentional lane departure parameters are collected and analyzed, including the driver's operation behavior, the motion characteristics of the vehicles and the relative motion position between the vehicle and the lane. Finally, an unintentional lane departure recognition model is constructed based on Gaussian Mixture-Hidden Markov Model (GM-HMM). The recognition results show good performance of the proposed model in online and offline tests.
车道偏离预警系统(LDW)是先进汽车驾驶辅助系统(ADAS)的重要组成部分, 对于保障驾驶安全, 避免交通事故具有重要的实际意义。目前, 国内外针对车道保持和车道偏离预警系统研发的关键技术, 主要基于转向灯信号和方向盘转角信号对车道偏离预警进行抑制。即在车辆速度超过规定阈值后自动开启车道偏离预警系统, 一旦发现驾驶员有转向灯或方向盘信号输入, 则会立即关闭系统。但这种方法在不打转向灯主动换道的情况下会导致误报警较多, 用户接受程度较差。因此, 设计一种可靠性高、误报率低的车道偏离预警系统, 必须要对驾驶员在车道偏离时的驾驶员意识状态进行准确识别。
国内外学者对于车道偏离识别已开展了一些相关研究。Nobuyuki[1]建立了基于隐马尔科夫(HMM)理论的换道行为识别模型。不同观测参数下, 各个换道意图识别率也不尽相同, 仅采集方向盘转角对正常换道意图的识别率只有85%, 采用方向盘转动速度对保持车道意图识别率为78.3%。Lethaus[2]采用FaceLab眼动跟踪装置, 分别采集了驾驶员在跟驰、左换道、右换道和超车4种工况下的眼部运动数据, 分析得到眼动行为相对驾驶员操作行为在时序上的优先性。在我国, 王玉海[3]根据采集的实车数据和对受试者驾驶经验的收集, 构建了模糊推理原则库, 把车速、加速踏板开度等按照规则进行分类提取, 建立了多信息源的驾驶员意图识别模型, 通过实车实验数据验证了模型的识别信度。侯海晶[4]采用头部转动、视觉运动和车辆运动3种参数基于隐马尔科夫的最优模型。吕岸[5]通过模拟器实验获取车辆的运动状态数据, 并以此作为外在的观察序列, 建立辨识模型, 较为准确地辨识了高速公路的超车行为。贾立山[6]提出了基于转向灯信号结合换道前的头部运动状态识别驾驶员的非主动状态下的车道偏离行为。
上述研究对于车道偏离识别进行了较为系统的研究, 为车道偏离系统的工程化应用奠定了一定基础。但是车道偏离通常包括两部分内容:主动换道偏离以及非主动换道偏离。其中, 非主动换道偏离我们可以定义为无意识车道偏离, 是由于疲劳或者非驾驶任务(次任务)两种因素所导致。这两种无意识车道偏离方式下的驾驶员操纵特性及车辆运动特性会有所差异, 而构建的车道偏离系统识别方法也应区别对待。但是, 目前该领域研究对此方面并没有详细的论述。因此, 为了丰富驾驶员非主观意图车道偏离的判别依据, 避免由于车辆输入信号缺失导致系统过于敏感等类似现象的发生, 本文研究了考虑驾驶员操纵特性、车辆运动状态特性和车辆与车道线相对运动特性的无意识车道偏离识别方法, 为车道偏离预警系统决策提供技术支持。
美国高速公路交通安全管理局在2010年4月的驾驶分心的报告中提到[7], 诱发驾驶员无意识车道偏离的因素主要包括注意力不集中(Inattention)和注意力分散(Distraction)两种, 前者指驾驶疲劳、服用药物后产生困倦等情况下驾驶员无法聚精会神; 后者指驾驶员在视觉分散、听觉分散、认知分散、其他操作行为等次任务干扰下发生的注意力转移行为。
换道或超车等引起的车辆横向偏离是驾驶员为了满足本车对车速和行车空间的需要而进行的主动操纵行为, 是驾驶员比较清楚地意识到要争取实现的目标和方法的需要, 行为实施前会有一个意识准备过程, 也就是有意识的正常换道; 而无意识的车道偏离则是驾驶员无意识的行为方式, 是驾驶员在注意力减弱或转移时产生分心而导致的车辆意外偏离。疲劳、走神等导致的车辆横向偏离则都是驾驶员的非主动操纵行为。本文将前者定义为有意识换道, 后者定义为无意识车道偏离。车道偏离分类如图1所示。
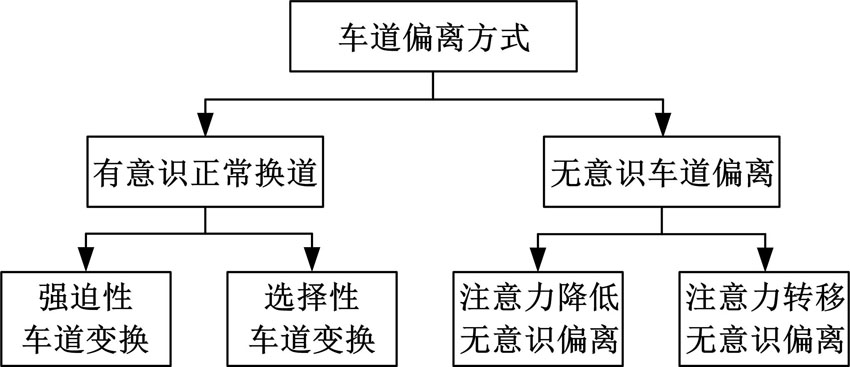 | 图1 车道偏离分类框图Fig.1 Lane departure types |
根据驾驶员车道偏离的分类及诱发原因, 同时规避实车试验风险, 本文基于CARSIM和LabVIEW可视化编程软件搭建了驾驶员在环试验台。按照正常换道、疲劳偏离和次任务偏离3种工况设计模拟器行驶工况, 制造会造成驾驶员无意识车道偏离和正常换道的驾驶氛围, 通过录像设备记录驾驶员面部及四肢运动状态, 并以此筛选正常换道和无意识车道偏离数据, 为驾驶员无意识车道偏离识别提供数据支撑。
为了获取驾驶员在不同车道偏离状态下的试验数据, 本研究以吉林大学汽车仿真与控制实验室驾驶模拟器为核心, 选CarSim RT为动力学仿真软件, 下位机NI PXI8610采集驾驶员的转向、转向灯、加速踏板和制动踏板操作信号输送给上位机, 上位机中车辆模型使用的是四速自动变速器, 车辆可以在驾驶员控制下以任意速度和行驶轨迹行驶。CarSim RT选择C级轿车, 车辆的结构参数和动力学参数均设置成默认值, 车宽为1739 mm, 轮胎中心距为1500 mm, 轮胎基本参数为205/55, R16。试验需要满足天气晴朗、路面平整干燥、交通拥堵情况适中3个条件, 并尽量保证与真实道路环境保持一致, 模拟试验场景如图2所示。试验选取12名(8名男性和4名女性) 年龄在25到35岁之间(平均年龄30岁, 平均驾驶年龄3.5年)的志愿者参加模拟器试验, 所有志愿者均获得了合法的驾驶执照。
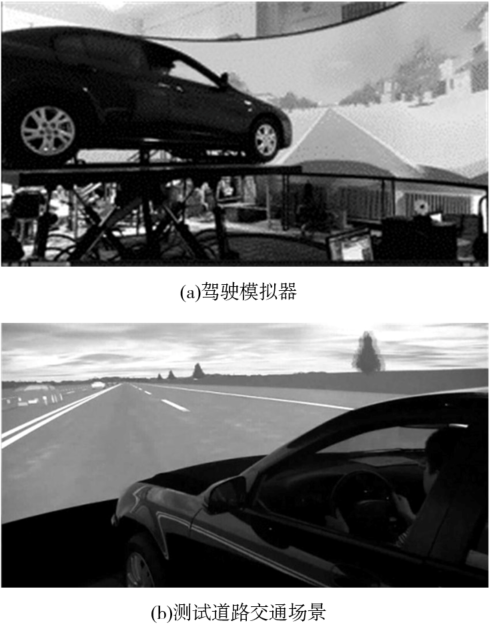 | 图2 驾驶员在环试验台Fig.2 Driving simulator |
2.2.1 疲劳试验
在模拟器的单调环境中, 驾驶员持续驾驶60 min以上即可进入非常疲劳的状态, 为了尽可能多地采集驾驶员在疲劳状态下的试验数据, 本文分别选取了早、中、晚用餐后3个时间段进行试验。早上9:00~10:00, 中午12:00~13:00, 晚上6:00~7:00, 每次试验持续1 h。疲劳道路场景中没有设置障碍车, 目的是为了排除由于换道等复杂驾驶任务对驾驶人的醒神作用。试验将正常换道工况穿插其中, 在驾驶员清醒且执行单一驾驶任务的状态下采集正常换道的数据。
2.2.2 次任务试验
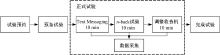
认知分散任务选取人因工程研究中的n-back试验范例[8]。整个过程保持80 km/h左右的速度行驶。如图3所示, 试验分为两个阶段:第一阶段为约5 min的预备试验, 利用这段时间向被试人员介绍试验内容, 同时让被试者适应驾驶模拟器操作环境; 第二阶段为持续30 min左右的正式试验。正式试验分三步展开。首先是10 min的Text Messaging测试, 安排一名试验人员, 向驾驶员手机发送微信消息, 设计回复性话题与驾驶员交流, 刺激驾驶员边开车边收发微信消息, 采集这个过程中驾驶员视觉分散下的车道偏离数据; 接下来是10 min的2-back试验(试验研究表明, 驾驶员在2-back任务下才会发生无意识车道偏离[8]), 通过语音播放的方式每隔2 s随机呈现给驾驶员0~9中的一个数字, 本阶段试验同样持续10 min; 最后完成10 min的手动操作试验, 驾驶员按照要求边开车边操作中控台的收音机, 并根据指令调整到指定的频道, 等待车辆恢复稳态后, 再次重复以上过程; 之后进入自由驾驶阶段, 5 min后结束本轮试验。
为了精确地确定无意识车道偏离的识别时间窗, 本文提出了在统计分析基础上融合受试者操作特性曲线(Receiver operating characteristic curve, ROC)的分析方法[9]。本文以压线时刻为基准, 分别选取了压线前1 s、2 s、3 s、4 s和5 s的样本数据作为输入, 对不同时间窗下的分类结果进行了评估, 比较结果如图4所示。
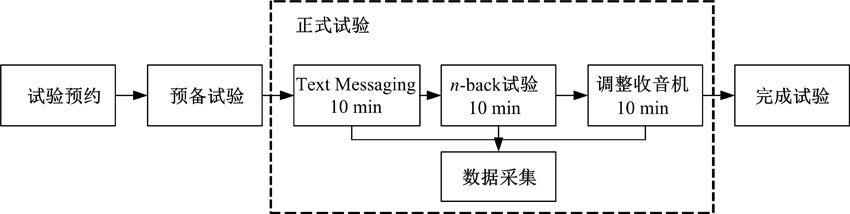 | 图3 次任务偏离试验流程图Fig.3 Experimental flowchart of second-task based lane departure |
结果显示, 压线前不同时间段内的曲线下面积(AUC)分别为0.7235、0.7503、0.8467、0.7922和0.6077, 其中压线前3 s的正常换道AUC最大, 这说明压线前3 s为意图时间窗的识别效果最好。因此本文确定驾驶员车道偏离识别时间窗为3 s。
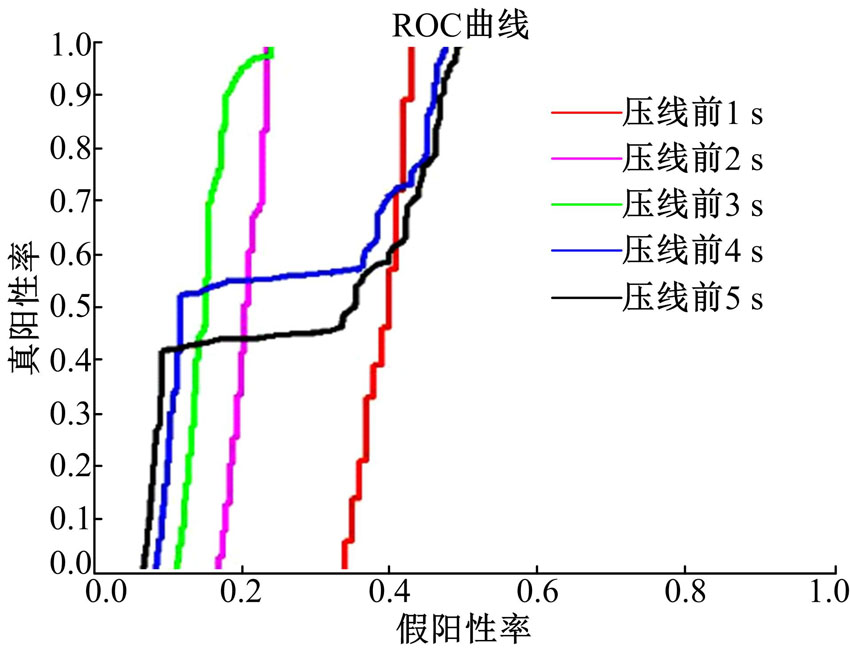 | 图4 不同识别时间窗的ROC曲线Fig.4 ROC curve with different time windows |
结合试验录像和车辆横向位置参数初步筛选有效样本, 参考以下规则确定偏离样本:
(1)模拟器的方向盘转角有左正、右负之分, 因此将挑选样本按照向左偏离和向右偏离进行初步分类。
(2)驾驶员的偏离状态应该可控, 保证没有过度偏离导致个别样本极度异常的现象发生。
(3)筛选出的样本中车速值应大于60 km/h。
按照上规则, 最终筛选出无意识车道偏离样本480组, 其中疲劳偏离样本有160组、次任务偏离样本有160组、正常换道样本有160组。
无意识车道偏离下的人-车-路特性分析是指对驾驶员在疲劳偏离和次任务偏离后的驾驶操纵、车辆运动状态和车辆横向位置变化规律进行归纳总结。与车道偏离紧密相关且模拟器和实车均可直接获取数据包括方向盘转角、方向盘转动速度、横摆角速度、横向加速度、车辆横向位移和横向平均速度。
3.1.1 方向盘转角
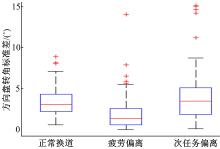
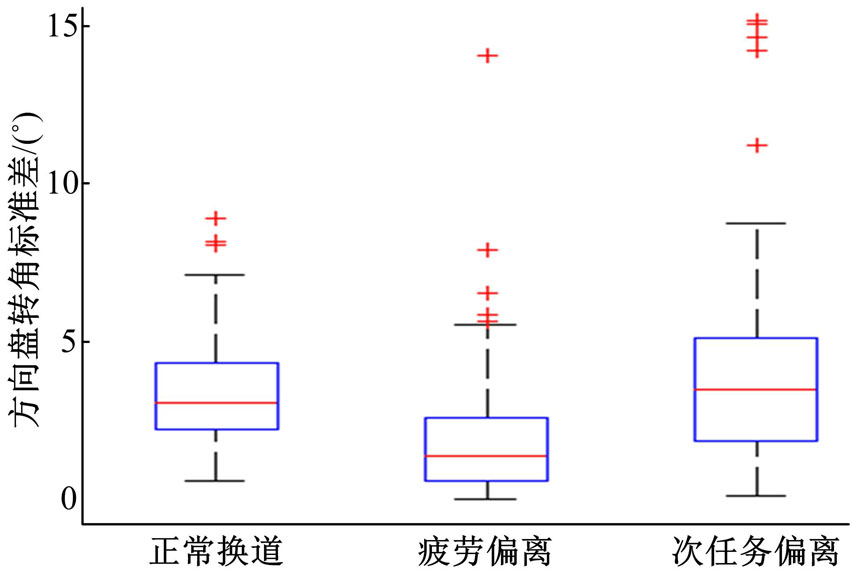
本文对能够反映一段时间内方向盘转角值的波动情况和离散程度的转角标准差进行了统计分析。对所有正常换道和无意识车道偏离样本进行分析, 结果如图5所示。
 | 图5 方向盘转角标准差分布Fig.5 Standard deviation distribution of steering wheel angle |
由图5可以看出, 正常换道方向盘转角标准差的四分之一分位、中位数和四分之三分位均大于疲劳偏离对应的值, 且次任务偏离下的方向盘转角变化规律与疲劳偏离正好相反。将正常换道和疲劳偏离转角、正常换道和次任务偏离转角标准差进行独立样本t检验, 得到相应的结果p1=0.0001< 0.05、p2=0.045< 0.05, 说明正常换道的转角标准差显著大于疲劳偏离及小于次任务偏离。由此, 三者之间存在显著的差异性, 可以作为区别不同车道偏离状态的特征参数。
3.1.2 方向盘转角熵值
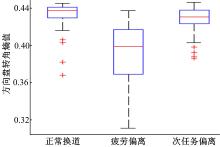
方向盘转角熵值(Steering entropy)的概念是日本学者Nakayama于1999年提出的[10], 研究结果表明, 转角熵值可以推测驾驶员操纵方向盘的稳定性, 同时也可以评估驾驶员的心理负荷。熵值越大, 表明驾驶操作越紊乱, 心理负荷越大。转角熵值根据方向盘转角的预测偏差出现的概率进行计算。对所有正常换道和无意识车道偏离的方向盘转角熵值进行统计, 结果如图6所示。
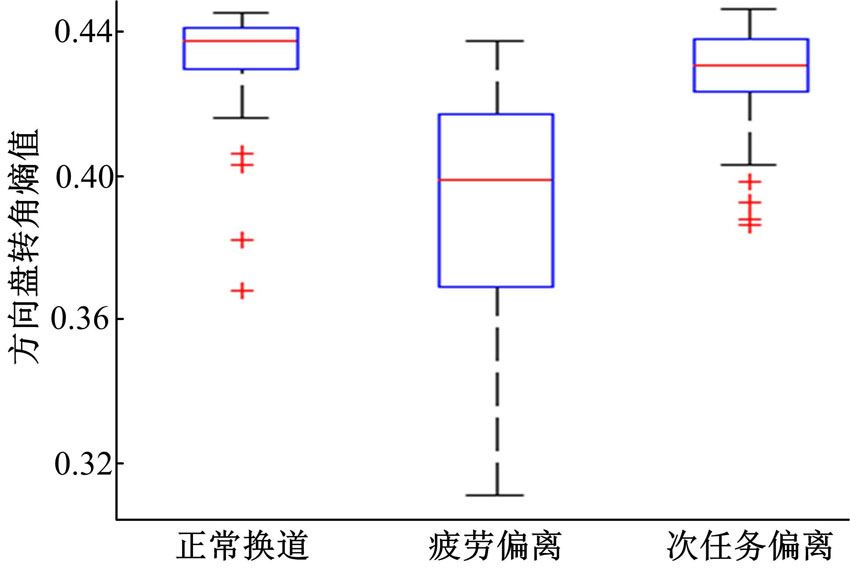 | 图6 方向盘转角熵值分布Fig.6 Steering angle entropy distribution |
从图中可以看出, 疲劳偏离方向盘转角熵值明显小于正常换道和次任务偏离。把疲劳偏离和正常换道的方向盘转角熵值进行独立样本t检验, p=0.0001< 0.05, 表明疲劳偏离的转角熵值统计特性明显区别于正常换道, 但是正常换道和次任务偏离状态的熵值变化特性相近。因此, 方向盘转角熵值只能作为判别疲劳偏离状态的特征参数。
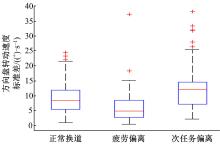
 | 图7 方向盘转动速度标准差分布Fig.7 Standard deviation distribution of steering wheel angle velocity |
3.1.3 方向盘转动速度
本文采用方向盘转动速度标准差来分析驾驶员在转动方向盘时的稳定程度, 标准差值大则转动速度波动大, 驾驶稳定性差。方向盘转动速度标准差的分布如图7所示。整体来看, 次任务偏离下的转动速度标准差整体大于正常换道, 而正常换道的转动速度标准差大于疲劳偏离。其中, 疲劳偏离与正常换道下的方向盘转动速度标准差进行独立样本t检验, p=0.002< 0.05, 说明二者转动速度标准差存在显著差异; 次任务与正常换道下的方向盘转动速度标准差进行独立样本t检验, p=0.047< 0.05, 证明二者存在显著性差异。综上, 方向盘转动速度可以用来区别正常换道和疲劳偏离和次任务偏离状态。
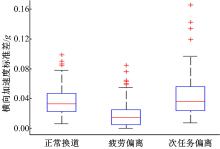
3.2.1 横向加速度
利用横向加速度结合驾驶员的操纵行为特性规律, 可以推断出驾驶员出现的车道偏离是正常换道行为还是无意识的车道偏离行为。采用同上文一样的统计方法对3种车道偏离状态下车辆横向加速度标准差进行分析, 结果如图8所示。从图中可知, 疲劳偏离的横向加速度标准差明显区别于正常换道状态。进行独立样本t检验, 显著性伴随概率值p=0< 0.05, 表明二者具有显著差异。次任务偏离的横向加速度标准差与正常换道区别不大。如此, 横向加速度只可以作为疲劳偏离的判别依据。
 | 图8 横向加速度标准差分布Fig.8 Standard deviation distribution of lateral acceleration |
3.2.2 横摆角速度
对能够反映横摆角速度离散程度的标准差进行分析, 标准差值大, 说明车辆摆动频率高, 驾驶员对车辆的调整较为频繁。分析结果如图9所示。观察发现, 疲劳偏离的横摆角速度标准差明显区别于正常换道。进行独立样本T检验, 显著性伴随概率值p=0.013< 0.05, 表明二者具有显著差异。次任务偏离的横摆角速度标准差分布范围略大于正常换道, 且基本包含了正常换道的所有分布, 二者没有明显差异。由此, 横摆角速度可以作为疲劳偏离的判别依据, 但是不能明显区分正常换道和次任务偏离。
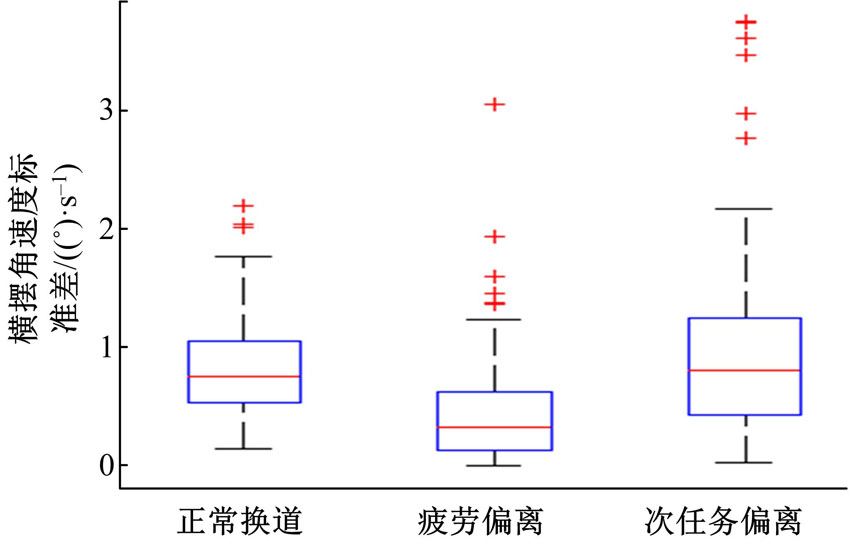 | 图9 横摆角速度标准差分布Fig.9 Standard deviation distribution of yaw velocity |
3.3.1 车辆的横向位移
对横向位移进行统计分析, 结果如图10所示。可以看出, 正常换道状态的横向位移主要分布在0.004 m附近, 疲劳偏离主要分布在0.003 m附近之间, 对二者进行独立样本t检验, p=0.007< 0.05。与正常换道和疲劳偏离比较, 次任务偏离的横向位移分布比较分散。进一步对正常换道与次任务偏离的横向位移进行独立样本t检验, p=0.857> 0.05, 说明横向位移大小可以用来区分疲劳偏离和正常换道, 但是不可以区分次任务偏离和正常换道。
 | 图10 横向位移均值分布Fig.10 Distribution of the average lateral location |
3.3.2 车辆的横向平均速度
横向平均速度可以体现车辆是快速趋近车道线, 还是缓慢靠近车道线。图11是对3种不同偏离状态下所有样本的横向平均速度均值进行的统计分析。可以看出, 疲劳偏离明显区别于正常换道, 二者的独立样本t检验的结果为p=0< 0.05, 说明二者在偏离过程中, 横向平均速度存在显著差异。此外, 正常换道和次任务偏离独立样本t检验的结果为p=0.17> 0.05, 说明正常换道与次任务偏离的横向平均速度不存在显著差异。综上可知, 横向速度仅可以显著区分正常换道和疲劳偏离, 不能区分正常换道和次任务偏离。
 | 图11 横向平均速度均值分布Fig.11 Distribution of average lateral velocity |
本文主要研究目标是建立能够准确识别驾驶员无意识车道偏离行为的数学模型, 本文采用高斯隐马尔科夫模型(GM-HMM)进行模型构建。根据隐马尔科夫建模需要, 筛选能够推断无意识车道偏离行为的特征参数。不同原因导致的无意识车道偏离的车辆运动状态统计特性有所差异, 疲劳偏离下的人-车-路特性与正常换道均不相同, 而次任务偏离下车辆的横摆角速度、横向加速度、横向位移和横向平均速度与正常换道的差异性不大。因此, 将无意识车道偏离模型又细分为两类, 最终确定的不同车道偏离状态识别模型包括:正常换道模型、疲劳偏离模型和次任务偏离模型。根据不同偏离状态, 依照分析结果最终确定了各个模型的特征参数, 具体信息如表1所示。
根据GM-HMM建模要求, 观测层输入参数必须保持一致, 因此特将正常换道按照观测层输入不同建立两个模型。正常换道模型1和疲劳偏离模型的特征参数包括方向盘转角、转角熵值、方向盘转动速度、横向加速度、横摆角速度、横向位移、横向平均速度7个参数, 而正常换道模型2和次任务偏离模型中仅包含方向盘转角和方向盘转动速度2个参数。将正常换道1号模型和疲劳偏离模型放入1号模型库中, 将正常换道2号模型和次任务偏离放入2号模型库。
模型测试的过程, 就是将测试样本输入模型库中, 寻找最能解释当前观察序列的预测模型, 即HMM中的评估问题。以疲劳偏离识别过程为例, 在建立分类器的过程中需要将原始数据样本分为训练集和测试集, 模型训练中所使用的训练集, 剩余的疲劳样本则全部用来对模型进行测试。此外, 测试集中还加入了正常换道模型1的测试样本。将测试集输入1号模型库中, 结合前向-后向算法评估正常换道模型1和疲劳偏离模型产生输入的观察序列的概率, 输出概率较大者即为该观测序列对应的预测模型。次任务偏离识别过程与疲劳偏离相同。将通过不同模型库得到的识别结果以分类散点图来表示, 如图12所示。
| 表1 车道偏离特征参数统计表 Table 1 Lane departure characteristic parameter |
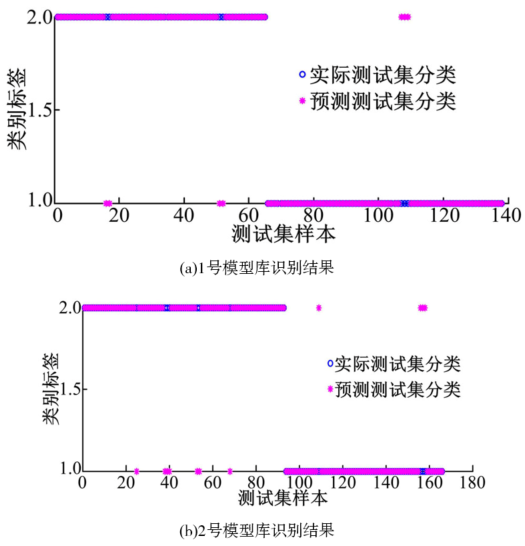 | 图12 GM-HMM无意识车道偏离模型识别结果Fig.12 GM-HMM based unintentional lane departure model recognition results |
图12中, 将预测的测试集分类结果与实际的测试集分类结果进行比较, 即可计算本次识别的准确率。疲劳偏离识别准确率为94.21%; 同理可算, 次任务偏离识别准确率为92.17%。较疲劳偏离而言, 次任务偏离识别准确率有所降低, 推测与识别参数种类较少有直接关系。以上分析结果表明模型识别效果为优, 识别信度高, 从而也说明了运用GM-HMM识别驾驶员无意识车道偏离方法的有效性。将获取的试验数据进行离线分析, 将其分为训练集和测试集, 分别应用在基于无意识车道偏离下的人-车-路特性分析建立的GM-HMM的训练和识别过程中, 得到了较优的识别结果。在构建在线识别模型的过程中, 先将未知类型样本输入到偏离识别模型2中, 判别其是否为次任务偏离样本。如是, 则判别过程结束; 如不是, 则将其输入到偏离识别模型1中, 继续判别其是否为疲劳偏离样本。
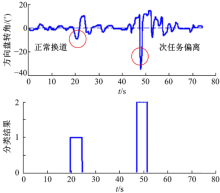
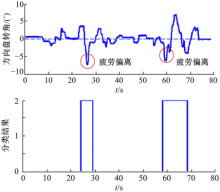
为了进一步验证模型的有效性, 提高模型的实际应用效果, 将前文基于MATLAB工具箱编写的建模算法移植到驾驶员在环实验台上。通过CarSim和LabVIEW联合仿真获取试验数据, 从中截取一段时间长度约80 s的次任务偏离试验与疲劳偏离试验数据放入本文构建的无意识车道偏离识别系统模型中进行识别, 结果如图13、14所示。其中纵坐标“ 分类结果” 中0、1、2分别表示车道保持、正常换道和无意识偏离。
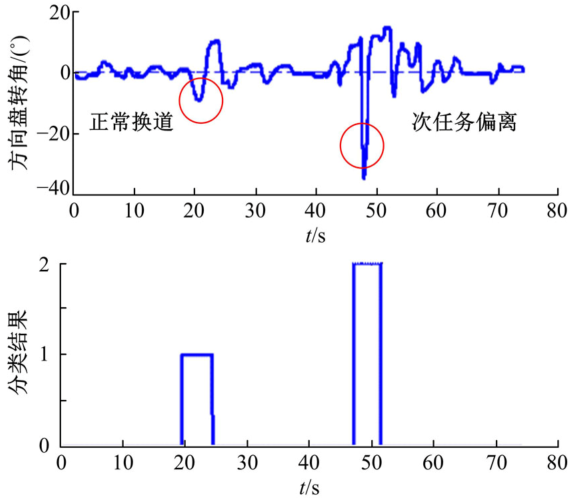 | 图13 次任务偏离在线识别结果Fig.13 Result of second-task based lane departure recognition |
从图13、图14可以看出, 预测分类结果与真实情况基本吻合, 满足实时识别的要求。比较两种不同无意识偏离的在线识别结果可知, 驾驶员在次任务偏离时, 虽然偏离幅度很大, 但驾驶员修正力度较大, 偏离持续时间相对较短, 而疲劳偏离幅度虽然较小, 但是随着疲劳程度的增加, 偏离持续时间也明显变长。
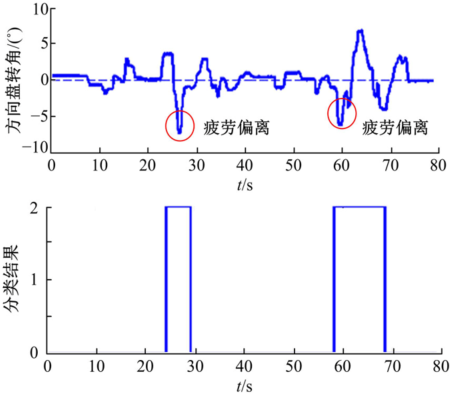 | 图14 疲劳偏离在线识别结果Fig.14 Fatigue based lane departure recognition results |
为了丰富驾驶员无意识车道偏离的判别依据, 本文提出了考虑驾驶员操纵特性、车辆运动状态特性和车辆与车道线相对运动特性的无意识车道偏离识别方法:①将驾驶员无意识车道偏离行为分为疲劳偏离和次任务偏离。按照无意识车道偏离的不同诱因, 设计了无意识车道偏离试验并按照相关性、显著差异性筛选了能够区别正常换道和无意识偏离的特征参数; ②基于高斯混合隐马尔科夫理论建立了疲劳偏离和次任务偏离无意识状态识别模型, 借助MATLAB编程实现算法并完成了模型的离线测试与在线验证, 离线测试结果表明, 疲劳偏离识别准确率为94.21%; 次任务识别准确率为92.17%, 具有较好的识别效果。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|