



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
交叉口可变导向车道控制优化模型
[姚荣涵 , 张晓彤, 廉莲]
, 张晓彤, 廉莲]
, 张晓彤, 廉莲]
|
|


作者简介:姚荣涵(1979-),女,副教授,博士.研究方向:间断交通流理论与方法.E-mail:cyanyrh@dlut.edu.cn
为了均衡交通流向分布且保证控制方案平稳过渡,提出具有可变导向车道的交叉口时空资源优化模型以及可变导向车道标志与信号灯组协调控制方法。为验证本文模型与方法的有效性,借助数学软件MATLAB、交通仿真软件VISSIM及其信号控制逻辑工具VisVAP,使用一个算例对比分析可变导向车道控制方案与固定导向车道控制方案。结果表明:与固定导向车道控制方案相比,可变导向车道控制方案使具有可变导向车道的进口道及交叉口的车均延误分别降低3%~50%和7%~15%,说明可变导向车道控制优化模型能适应交叉口交通需求的潮汐特性,可变导向车道标志与信号灯组协调控制方法能保证交通流安全、平稳运行。
To balance directional distribution of traffic flow and ensure the smooth transition of control scenario, an optimization model of time-space resource allocation at an intersection with reversible approach lanes and a coordinated control method for a reversible approach lane and corresponding signal group are proposed. To validate the effectiveness of the optimization model and control method, a case study is carried out to analyze the control scenarios with reversible approach lanes and with fixed approach lanes. The software MATLAB, traffic simulation software VISSIM and the signal control logic tool VisVAP are used in this study. Results show that, comparing to the control scenario with fixed approach lane, the average delay can be reduced by 3% ~ 50% and 7% ~ 15% for the approach with reversible lane and the entire intersection, respectively. The achievements indicate that the proposed optimization model can satisfy the tidal traffic demands at intersections and the control method can guarantee the safe and steady traffic flow operation.
目前, 国内外关于可变导向车道的研究主要集中于两方面:①可变导向车道控制方法。李丽丽等[1]提出了基于检测器数据的可变导向车道控制方法, 并对比了可变导向车道功能变化前、后直行车流和左转车流的车均延误。周洋等[2]研究了检测器的布设, 并明确了可变导向车道功能切换的实施条件和时刻。针对可变导向车道功能发生变化, 陈东静等[3]提出了主预信号协调控制方法, 并使用VISSIM软件对比了预信号不同时车流的运行效果; ②车道功能动态划分方法。Wong等[4]从数学建模角度整合了车道功能和信号配时两种设计, 并使用算例说明了交叉口进出口道车道布局的优化问题。为充分利用信号控制交叉口时空资源, Wong等[5]和He等[6]先后针对单时段和多时段建立了车道功能和信号相位组合优化模型。
鉴于此, 课题组前期提出了渠化可变导向车道交叉口预设信号配时优化模型, 但没有考虑左转短车道的影响, 也未提出车道功能切换时的具体控制方法[7]。本文据此完善已有信号配时优化模型, 并提出可变导向车道标志控制方法。
在交叉口, 当交通流向具有明显潮汐特性时, 设置可变导向车道能使进口道流量在各条车道上的分布达到均衡。这里探讨可变导向车道功能在左转和直行之间切换。为了便于区分和理解, 将交叉口进口道分为3类:①车道功能随交通需求发生变化的车道称为可变导向车道; ②限于地形条件采用增辟方式形成的固定导向车道称为短车道; ③由路段自然延伸形成的固定导向车道称为普通车道。
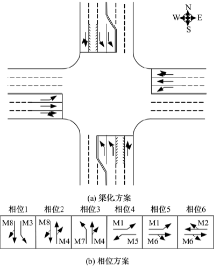
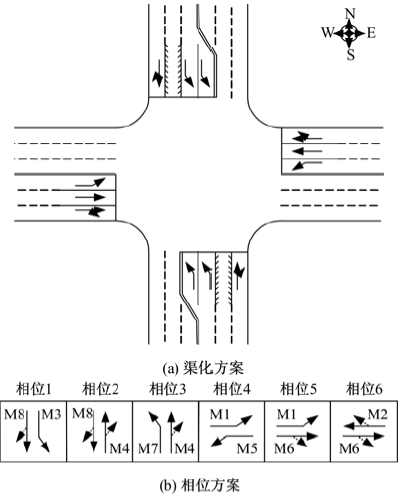
以图1(a)所示进口道为例, 由内到外分别渠化左转短车道、左转专用车道、可变导向车道和直右混行车道各1条。假设该进口道的右转车流不受单独的信号控制, 由于可变导向车道功能为直行或左转, 其相位方案如图1(b)所示, 即左转相位和直右相位。就交叉口而言, 相位相序方案需要考虑所有进口道各股车流之间的关系。
 | 图1 进口道渠化方案与相位方案Fig.1 Scenarios of approach layout and signal phasing |
考虑可变导向车道与左转短车道对进口道通行能力的影响, 一条车道组的通行能力为:
式中:
通过集计可得交叉口通行能力为:
式中:
根据美国道路通行能力手册(HCM2000)[8], 一条进口车道或车道组的车均延误为:
式中:
通过集计可得交叉口车辆总延误为:
式中:
为保障交通流运行安全, 车道组有效绿灯时间应大于或等于最小有效绿灯时间, 即:
式中:
根据信号配时设计理论, 所有相位有效绿灯时间之和加上总损失时间等于周期时长, 其值介于合理的上、下限之间, 即:
式中:
此外, 相位有效绿灯时间为非负数, 即:
为降低交叉口车辆总延误, 以最小化式(4)为目标, 以式(5)(6)(7)为约束条件, 可得信号配时优化模型为:
为保证交通流运行安全, 在任意一个控制方案切换时刻, 如果上一控制方案未执行完整周期, 需执行完整周期后再切换至下一控制方案。因此, 每一个控制方案修正的切换时刻为:
式中:
可变导向车道标志是一种指示标志, 其导向箭头随交通需求变化进行调节, 以实时响应交通流的变化。当可变导向车道功能发生变化时, 驾驶员需要一定的反应时间来适应这种改变。为保证安全, 也需要一定时间清空可变导向车道上还未驶离停车线的车辆。根据相邻时段可变导向车道功能是否发生变化, 将可变导向车道标志显示规则分为两类。
(1)可变导向车道功能不变
当本控制时段的可变导向车道功能与上一控制时段相同时, 上一控制时段与本控制时段任意一个信号周期内各种灯色的信号灯直接按其控制方案起亮和结束, 可变导向车道标志的导向箭头与信号灯组指示方向一致, 且一直高亮显示。
(2)可变导向车道功能改变
当可变导向车道功能发生变化时, 可变导向车道标志的显示规则也要发生变化。为保证控制方案切换时清空上一控制时段可变导向车道上还未驶离停车线的车辆, 并使本控制时段最初进入可变导向车道的车辆顺利驶入, 需计算清空时间和进入时间。
根据交通流的到达与释放规律, 清空时间与进入时间可分别表达为:
式中:
记
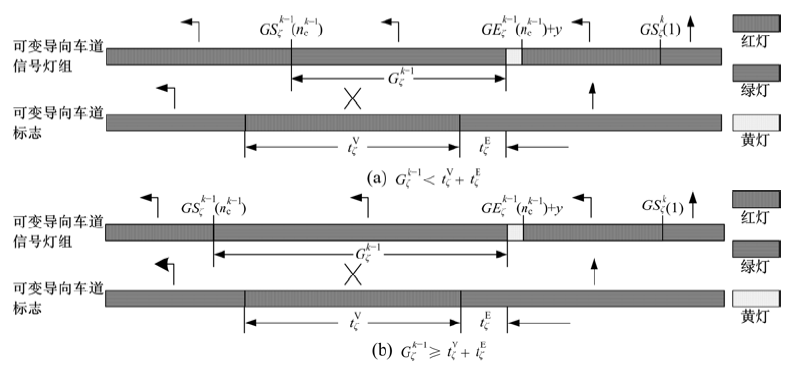 | 图2 可变导向车道功能改变时标志与信号灯组控制状态Fig.2 States of signal group and traffic sign for changing function of a reversible approach lane |
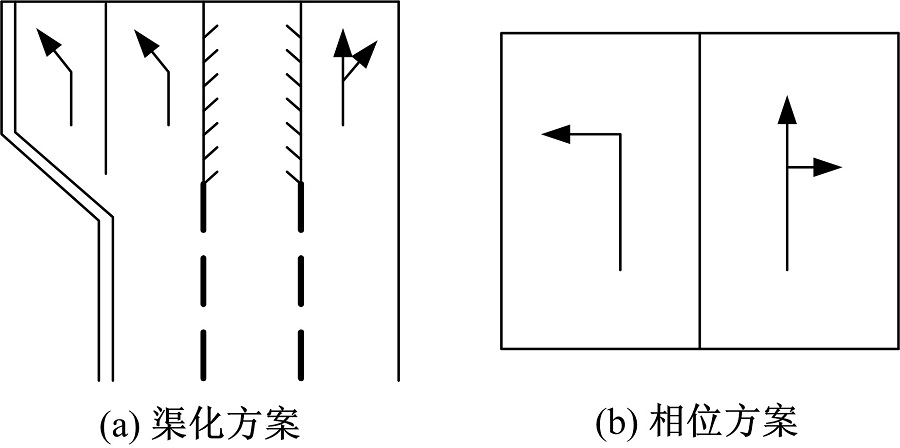
图3给出了一个含可变导向车道交叉口的渠化方案与信号相位方案。
 | 图3 交叉口渠化方案与信号相位方案Fig.3 Scenarios of intersection layout and signal phasing |
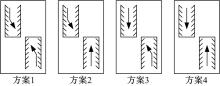
如图3(a)所示, 该交叉口东、西进口道分别渠化1条左转专用车道、直行车道和直右车道, 南、北进口道分别渠化1条左转短车道、左转专用车道、可变导向车道和直右车道。如图3(b)所示, 南、北进口道采用前置左转+后置左转方式, 东、西方向采用专用左转+前置左转方式, 其中M1、M3、M5和M7分别为西、北、东、南进口道的左转车流, M2、M4、M6和M8分别为东、南、西、北进口道的右车流。假定该交叉口交通流组成为100%的小汽车, 图4给出了各股车流的最高15 min流率和小时流量, 图中斜线左侧为最高15 min流率、右侧为小时流量, 单位均为pcu/h。针对图3所示交叉口, 可变导向车道功能属性集包含图5所示的4种方案。
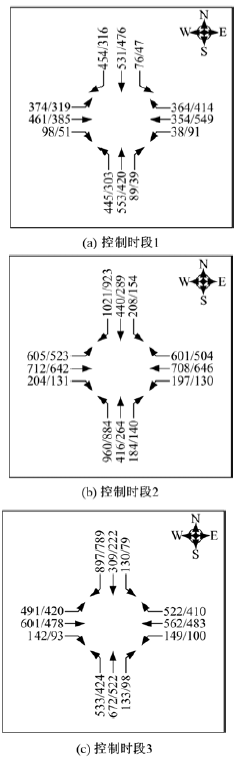 | 图4 小时流量与最高15 min流率Fig.4 Hourly volumes and peak 15 min flow rates |
根据HCM2000[8], 取
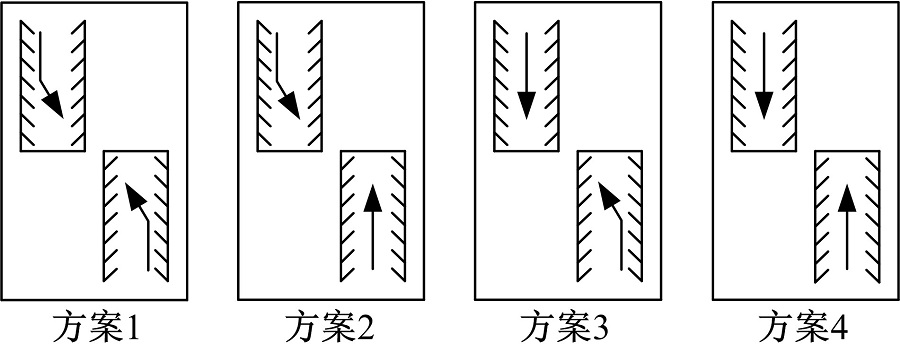 | 图5 可变导向车道功能方案Fig.5 Scenarios of functions of reversible approach lanes |
使用VISSIM 6.0软件建立交通仿真模型[12], 机动车期望速度取48~58 km/h; 车辆消失前等待时间取45 s; 黄灯和全红时间分别取3 s和2 s。为拟合饱和流率, 针对左转、 直行和直右车道, 安全距离的附加部分取2.45、2.40和2.45, 安全距离的倍数部分取3.45、3.40和3.45[12]。为消除随机因素, 采用多步运行模式, 仿真次数为5, 仿真时间设为11 400 s, 数据采集时段为600~11 400 s。获取延误数据时, 起始和结束检测断面的间距取200 m。另外, 可变导向车道标志距离停车线50 m。
当可变导向车道功能在所有时段内不发生变化时, 整个信号控制方案被称为固定导向车道控制方案; 反之, 被称为可变导向车道控制方案。当可变导向车道功能采用图5中的方案1、2、3和4时, 其信号控制方案分别被称为固定导向车道控制方案1、2、3和4。
针对上述5种信号控制方案, 使用模型(8)分别对其进行求解, 优化结果见表1。由该表可见, 每个时段内, 可变导向车道控制方案均选择固定导向车道控制方案中最好的一种。因此, 相比固定导向车道控制方案, 可变导向车道控制方案能使交通流始终处于最佳运行状态。
 | 图6 不同信号控制方案下车均延误的对比Fig.6 Comparisons of unit delay under different signal control schemes |
| 表1 不同信号控制方案的优化结果 Table 1 Optimization results of different signal control schemes |
针对可变导向车道控制方案, 由式(10)和(11)计算得到可变导向车道的清空时间和进入时间分别为17 s和4 s。
对于每种信号控制方案, 通过运行VISSIM仿真模型获取整个控制时段各进口道及交叉口的车均延误, 其对比结果如图6所示。从图6可以看出, 与固定导向车道控制方案相比, 可变导向车道控制方案使南进口道车均延误降低13.72%~47.25%、北进口道车均延误降低3.46%~50.34%, 而东、西进口道的车均延误可能有不同程度的增加, 就整个交叉口而言, 车均延误降低7.39%~14.62%。
面向渠化可变导向车道和左转短车道的信号控制交叉口, 以最小化车辆总延误为目标, 以可变导向车道功能和相位有效绿灯时间为决策变量, 构建了一种具有可变导向车道的交叉口时空资源优化模型; 进一步提出了可变导向车道标志与信号灯组协调控制方法。为了说明本文模型和方法的可行性, 设计了一个具有2条可变导向车道的十字交叉口, 以3个控制时段为例, 针对4种固定导向车道控制方案和可变导向车道控制方案, 使用本文模型获得了最优的配时参数和性能指标, 并利用VISSIM软件建立了交通流仿真模型。此外, 采用信号控制逻辑工具VisVAP实现了可变导向车道控制。结果显示, 可变导向车道控制方案在每个控制时段内均不劣于任意一种固定导向车道控制方案, 该方案可以明显降低具有可变导向车道的进口道以及整个交叉口的车均延误。这说明本文模型和方法能够很好地适应交叉口交通流向的潮汐特性, 并保证交通流安全、平稳地运行。研究成果可以为相关的工程实践提供理论依据, 并有助于缓解城市交通拥堵。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|