
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
舰载直升机复杂舰面上的动力学分析
[王倩 , 赵丁选, 赵颖, 陈娜]
, 赵丁选, 赵颖, 陈娜]
, 赵丁选, 赵颖, 陈娜]
|
|


作者简介:王倩(1989-),女,博士研究生.研究方向:工程机械动力学.E-mail:wangqianqianer@126.com
对舰载直升机着舰后的运动动力学进行了研究。首先针对海浪信号的随机不确定性,根据海浪波理论,提出了海浪信号的数学模型,然后利用海浪谱描述海浪的统计特性,运用MATLAB仿真平台仿真出不规则海浪并对其进行谱分析。最后基于拉格朗日方程,建立了着舰的机身动力学模型,对摇摆舰艇上的舰载机进行了动力学仿真并采用龙格库塔法对动力学模型进行实时解算。
The landing dynamics of the carrier helicopter on complex deck was studied. First, the random uncertainty of sea wave signal was considered, and the mathematical model of the sea wave signals was proposed according to the wave theory. The statistic characteristics of the sea wave were described by the way of sea wave spectrum. The irregular approximate progressing waves were simulated on MATLAB simulation platform, and the spectral estimation of the sea waves was conducted. Then, the landing dynamic model of the fuselage was established based on Lagrange equation. Finally, the dynamics simulation of the carrier helicopter on the complex deck was carried out and the Runge-Kutta method was used for the real-time calculation of the dynamic model.
由于舰载直升机具有许多其他飞行器难以达到或者不可能达到的优势从而被广泛地应用于军事和非军事行动中。它能以多批次的战斗群起降于中、小型舰艇上执行作战任务[1, 2]。可是海况复杂, 瞬息万变, 若遇上风浪, 船体大幅度横摇升沉, 给舰载机着舰带来了一定危险。为了能进一步了解舰艇摆动对舰载机的影响, 本文对舰载机着舰后的运动动力学[3, 4]进行了研究。将舰载机在甲板上的运动视为在舰体连体坐标系中的相对运动, 根据动力学原理[2]推导出舰载机在舰体连体坐标系中的动力学方程, 并结合推导出的舰艇在波浪中的摇摆方程, 对在摇摆舰艇上的舰载机进行了动力学仿真。本文方法可以对舰载机着舰的结果进行预判, 大大降低了舰载机着舰的危险系数。
根据流体力学知识可假设流体不可压缩, 波浪以速度
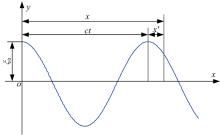
 | 图1 规则波浪示意图Fig.1 Schematic diagram of regular waves |
根据图1波浪的余弦曲线方程为
式中:
式中: t为时间; x为考察点在波浪传播方向与原点的距离。
实际应用中的不规则浪常用统计特性来描述, 其中对数据做谱分析, 进行无因次与数学拟合得到波浪在不同频率的能量分布— — 浪谱[5]。根据流体力学理论可知, 单位面积内的单个谐波能量为:
根据叠加理论, 在频率从
定义函数
式中:
皮尔逊-莫斯柯维奇谱简称P-M谱, 由学者Pierson和Moscowitz对大西洋风浪的观察资料整理分类并进行谱分析后得到, P-M谱仅由风速决定, 能很好地替代实际的随机海浪谱, 广泛应用于工程中[6]。其表达式为:
式中:
由于海况复杂多变, 基本把海浪视为不规则浪, 而不规则海浪可以视为规则海浪的叠加, 因此舰艇在不规则海浪作用下的摆动可以看做是舰艇在不同规则海浪作用下摆动的叠加[6, 7, 8]。
若舰艇以
式中:
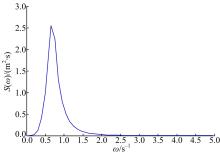
假设风速为14 m/s, 舰艇在4级海况下根据式(8)可得出海浪谱函和海浪摆动的图像如图2所示。
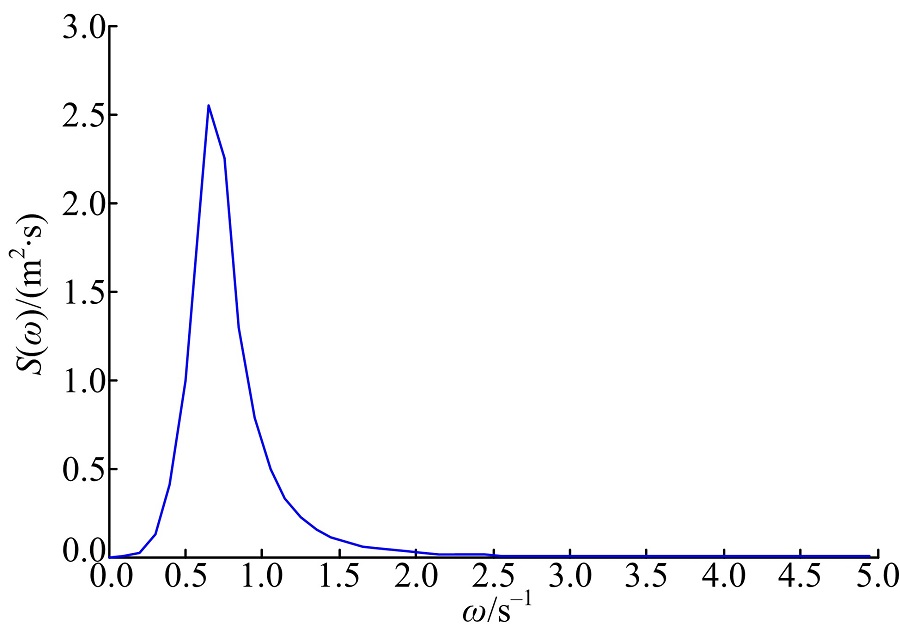 | 图2 4级海况下的浪谱函数图Fig.2 Spectrum map of state 4 wave |
根据图2可知浪谱函数主要区域为
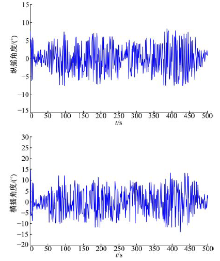
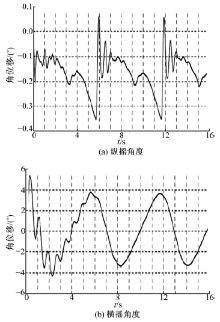
 | 图3 4级海况时的舰艇的纵摇和横摇角度随时间变化曲线Fig.3 Variation curves of time versus angle when ship pitching and rolling |
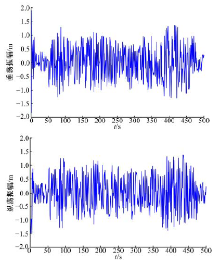
 | 图4 4级海况时的舰艇的垂荡和纵荡振幅随时间变化曲线Fig.4 Variation curves of time versus amplitude when ship heaving and pitching |
由图4可以看出:在第205~240 s、420~440区间为运动平稳期, 下文的仿真实验最初给定了航向与航速的运动数据, 并用该方法计算了480 s内的舰载运动记录成数据文件, 为下文仿真时实时调用。
设初始时刻固定坐标系位置与舰载机连体坐标系位置重合, 瞬时舰载机相对固定坐标系的方位以横倾角
式中:n11=cosλ cosθ -sinλ cosφ sinθ ; n12=-cosλ sinθ -sinλ cosφ cosθ ; n13=sinλ sinφ ; n21=sinλ cosθ +cosλ cosφ sinθ ; n22=-sinλ sinθ +cosλ cosφ cosθ ; n23=-cosλ sinφ 。
舰载机质心在固定坐标系中新坐标分量可根据转换矩阵与连体坐标系中直升机质心坐标求得, 公式如下:
根据拉格朗日方程, 建立动力学方程如下:
式中:T为动能; V为势能; F为耗散能; Q为广义力。
根据6自由度刚体动能的计算方式[9]和模型中提出的假设, 舰载机平面被视为是对称的, 故转动惯量与惯性积
式中:
设世界坐标系先绕舰艇连体坐标系Zs轴旋转h, 再绕新生成舰艇连体坐标系Xs轴旋转ρ , 最后绕新生成的连体坐标系Ys轴旋转κ , 经过三次旋转后生成新舰艇连体坐标系。根据式(10)可得从舰艇坐标系到舰载机连体坐标系的转换矩阵Ns, 设GHX 、GHY 、GHZ是重力方向向量在直升机连体坐标系中的3个分量, 其表达式如下:
则直升机重力势能表达式如下:
根据广义坐标的选取, 舰载机在飞机或着舰过程中, 有旋翼升力
将式(13)~(16)代入式(12), 得到集飞行与着陆于一身的直升机动力学方程, 其表达式如下:
式中:
对于高阶微分方程组本文选用在工程上应用广泛的高精度单步算法— — 四阶龙格库塔方法。本文首先用中间变量
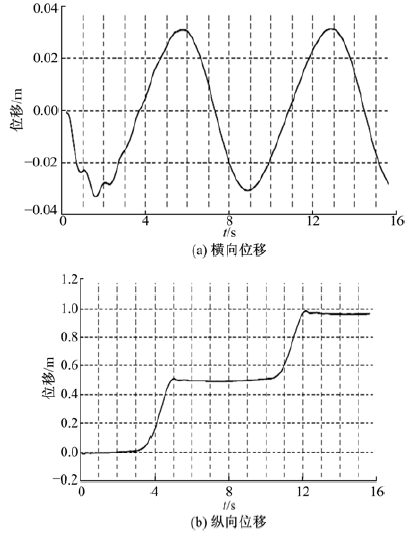 | 图5 舰载机质心位移随时间变化曲线Fig.5 Variation curve of time versus displacement of helicopter centroid |
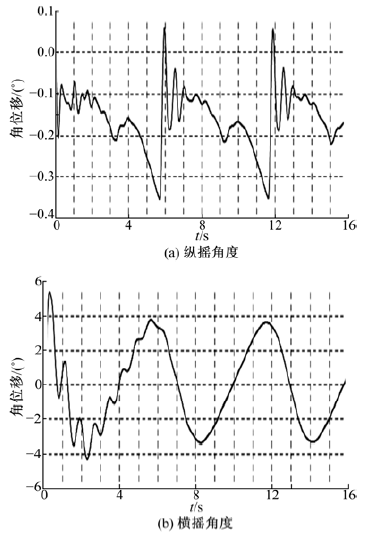 | 图6 舰载机摇动角度随时间变化曲线Fig.6 Time variation curve of helicopter swing |
由图5(a)可以看出, 舰载机在横向方向的振动是自身固有频率振动与受海浪冲击的受迫振动的合成。由图5(b)可以看出, 随着船舰的摇动, 当纵摇摆角度变大时, 直升机开始沿舰面滑动。
图6反映出舰艇在海浪作用下的摆动情况, 舰载机纵摇与纵向位移的趋势相同。舰载机的横摇的固有振动衰减后, 直升机随海浪频率横摇。
本文分析了舰载机与舰艇系统的模型, 并推导出其动力学方程。运用该模型能够预测出舰艇的摇摆对舰面上直升机的影响。根据本文仿真结果得出, 当海浪运动幅值较大时, 舰载机在舰面上处于危险状态。运用该方法能够比较准确地反映出舰载机在摇摆舰艇面上的运动状态, 为预测直升机在摇摆舰艇平面上的运动提供了一种新方法。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|