


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
着陆器足垫冲击特性模型试验
[黄晗1  , 李建桥
, 李建桥1 , 陈百超2 , 吴宝广1 , 邹猛1 ]
, 李建桥, 陈百超|
|


作者简介:黄晗(1989-),男,博士研究生.研究方向:车辆地面力学.E-mail:huanghan452012@163.com
本文探讨了着陆器在星球表面降落冲击过程中土壤类型和密实度、冲击高度和足垫直径对冲击深度、加速度峰值和冲击力峰值的影响。分析结果表明,土壤类型和密实度对冲击深度的影响最大,其次为足垫直径,冲击高度的影响最小。相较于冲击高度,土壤的密实度对足垫在冲击过程中的加速度峰值的影响较冲击高度的大。建立了足垫冲击力峰值模型,模型的拟合相关系数 R2均达到0.9以上,结果表明该模型能较好的预测足垫冲击力峰值。
The impact effect emerged during the touch down process of space lander may influence the safety of detection equipment and the reliability of the exploration mission. The effects of soil type and compactness, footpad diameter and impact height on the impact performance of the footpad, including impact depth, peak acceleration and force are investigated. Results show that the soil type and compactness have the maximal influence on the impact depth, followed by footpad diameter, then the impact height. The model of peak impact force was established, and the square of correlation coefficient R2 was above 0.9, which verifies that the proposed model can accurately predict the footpad peak impact force.
中国正进行以月球软着陆采样为目标的探月三期工程以及即将开展的火星探测任务[1, 2]。实现着陆器软着陆是深空探测工程的关键环节。着陆器着陆过程中会产生巨大的冲击作用, 影响其内部精密仪器的正常工作[3, 4]。因此, 研究着陆器足垫与土体相互作用对着陆器软着陆具有重要意义。郝飞等[5]开展了着陆器足垫在模拟月壤上的承载特性试验, 以研究加载速度对模拟月壤承载力的影响, 结果表明加载速度会对模拟月壤地基的弹性模量产生影响。该研究未考虑足垫对模拟月壤的冲击特性。吴晓君等[6]利用独立研发的垂直冲击模型试验装置, 探讨了足垫冲击过程中土壤密实度、冲击速率和冲击质量等对足垫刺入深度、最大轴力和最大加速度等的影响, 结果表明, 足垫冲击深度和最大轴力都随着冲击能量的增大而增大, 并且逐渐趋于平稳。但该研究未考虑土壤类型对足垫冲击特性的影响。文献[7]阐述了3种月球重力场模拟器的原理和装置, 并对各自的优缺点进行了评述, 给出了在地面上进行着陆模式模拟试验方法。但由于在试验中对月壤没有合适的模拟方法, 该方法得到的试验数据与真实着陆时数据仍存在一定差异。凌道盛等[8]建立了着陆器足垫垂直冲击模拟月壤三维动力有限元仿真模型, 分析了足垫冲击荷载作用下的轴力、速度和位移的实时动力响应, 与室内模型试验结果进行对比, 验证了该模型的合理性, 但未对足垫尺寸对冲击响应的影响进行进一步研究。
针对上述情况, 本文研制了着陆器足垫垂直冲击试验装置, 在不同类型土壤条件下, 以足垫冲击深度、加速度峰值和冲击力峰值为试验指标、足垫直径和冲击高度为试验因素进行足垫冲击特性试验。分析了试验因素对足垫冲击特性影响规律, 建立了冲击力峰值模型, 以期为着陆器足垫在星球表面冲击特性提供基础数据和技术方法。
为了研究不同试验土壤上着陆器足垫冲击特性, 吉林大学工程仿生教育部重点实验室研制了着陆器足垫模型垂直冲击试验系统, 如图1所示。该试验系统主要由土槽、冲击装置和控制采集系统3部分组成。该系统可实现足垫从不同高度沿导轨垂直冲击土槽中试验土壤。土槽尺寸长、宽和高分别为300、300和400 mm; 最大冲击高度和载荷分别为1.5 m和500 N; 最大理论垂直冲击速度约为5 m/s。
冲击装置主要由导轨、起吊平台、电磁铁、冲击平台、足垫模型、标尺、吊索和手轮等组成。起吊平台通过电磁铁将冲击平台吸附, 通过吊索和手轮起吊至预定试验高度后, 电磁铁控制开关关闭电磁铁电源, 启动冲击平台, 足垫模型从静止悬停状态迅速转变为自由落体运动, 沿垂直导向立柱自由下落冲击土槽中土体。
控制采集系统包括加速度传感器(型号为CA-YD-180C, 灵敏度为0.509 mV/(m· s-2))、移动数据采集器(型号为MDR-81)和控制PC, 其中, 足垫冲击加速度信号通过安装在足垫上方的压电式加速度传感器和移动数据采集器记录, 控制PC用于试验控制、数据采集和存储。
 | 图1 着陆器足垫冲击试验系统Fig.1 Lander footpad impact test system |
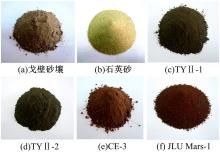
本文试验介质共有6种, 如图2所示, 包括:吉林大学研制的面向月面巡视探测器的模拟月壤TYII-1(粗大颗粒)和TYII-2(细小颗粒); 面向火星探测器的JLU Mars-1型模拟火星壤[9, 10]; 采集自敦煌戈壁滩(巡视器试验外场)的戈壁砂壤; 国内外普遍采用的成本较低的石英砂; 同济大学研制的面向月球着陆器的CE-3型模拟月壤[5]。6种试验土壤中, 模拟月壤和模拟火星壤均以火山灰和火山岩为原料, 通过去除杂质、研磨、筛分、配比加工而成[9]。石英砂颗粒粒径分布范围较窄, 属于均匀材质, 主要用于对比试验。
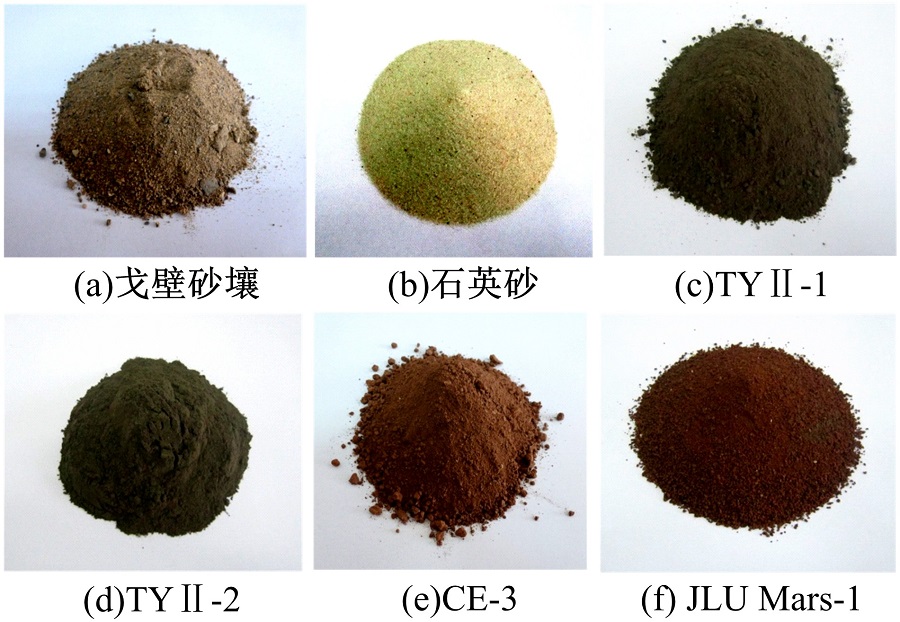 | 图2 试验土壤Fig.2 Test soils |
试验土壤的主要力学性能参数如表1所示, 含水率均不超过1%, 属于干性砂壤。容重范围为土壤自然和密实状态下的上限和下限值, 其中两种状态下CE-3和JLU Mars-1的容重变化较大。中值粒径D50为土壤的累计粒度分布百分数达到50%时所对应的粒径; 不均匀系数Cu用来衡量土壤中颗粒的均匀程度, 若Cu< 5, 则土壤颗粒分布均匀; 曲率系数Cc用来衡量土壤中粒度分配范围形状的指标, 其数值为1~3, 认为土壤的级配是合适的。由表1可知, TYII-2的中值粒径最小, 颗粒总体较细, 石英砂的其次, TYII-1、JLU Mars-1的在200 μ m左右, 戈壁砂壤和CE-3的较大; 4种模拟星壤不均匀系数Cu均大于5, 说明土壤颗粒分布不均匀, 而戈壁砂壤和石英砂则属于相对均匀介质; 6种土壤中仅模拟月壤TYII-2的曲率系数Cc为1~3, 表明其级配较其他土壤的好。
| 表1 试验土壤参数 Table 1 Parameters of test soils |
本试验中, 足垫冲击载荷为固定值10 kg, 以土壤种类、容重、足垫直径和冲击高度为试验因素, 足垫垂直冲击深度、加速度峰值和冲击力峰值为试验指标, 开展足垫冲击特性试验研究。
(1)足垫直径:考虑到土槽尺寸和足垫边界效应, 基于相似理论足垫采用了缩尺寸模型[5], 足垫模型采用高度为10 mm的圆板代替, 直径为60~140 mm, 采用等间距5水平。
(2)冲击高度:着陆器在星球表面降落过程中分为减速、悬停和自由下落3个阶段, 其中自由下落阶段为垂直冲击过程, 其初始速度约4 m/s, 对应冲击高度约为800 mm, 因此为考察冲击高度对足垫冲击特性影响, 试验中冲击高度水平还包括600 mm和1000 mm。
(3)土壤状态:土壤在不同密实度下呈现的物理力学特性会对试验产生不同的结果[11], 综合考虑试验需要以及整备方法的稳定性和效率, 选择2种整备方法, 使得土壤达到自然状态和密实状态2种不同状态, 分别对应表1容重数值的最小值和最大值。
综上所述, 试验因素水平表如表2所示, 试验方案中将土壤种类和状态作为单独考虑的试验因素。6种土壤2种不同状态下对每个试验点进行3次重复试验, 试验总次数为540次。
| 表2 试验因素水平表 Table 2 Levels of factors for soil bin test |
为获取足垫冲击深度, 试验前, 降落冲击平台, 使得足垫下表面与土壤平面刚接触, 记录标尺读数; 冲击过程结束后, 再次记下标尺读数, 二者差值则为冲击深度。
为提高测量精度, 冲击加速度信号由对称安装在足垫上方的2个加速度传感器测量, 采样频率为256 Hz, 采集时间为8 s。通过DDP动态信号处理软件(见图3)提取加速度峰值, 取2个加速度传感器均值作为足垫的加速度数值。冲击力峰值则通过瞬时加速度和相互作用时间计算得到。
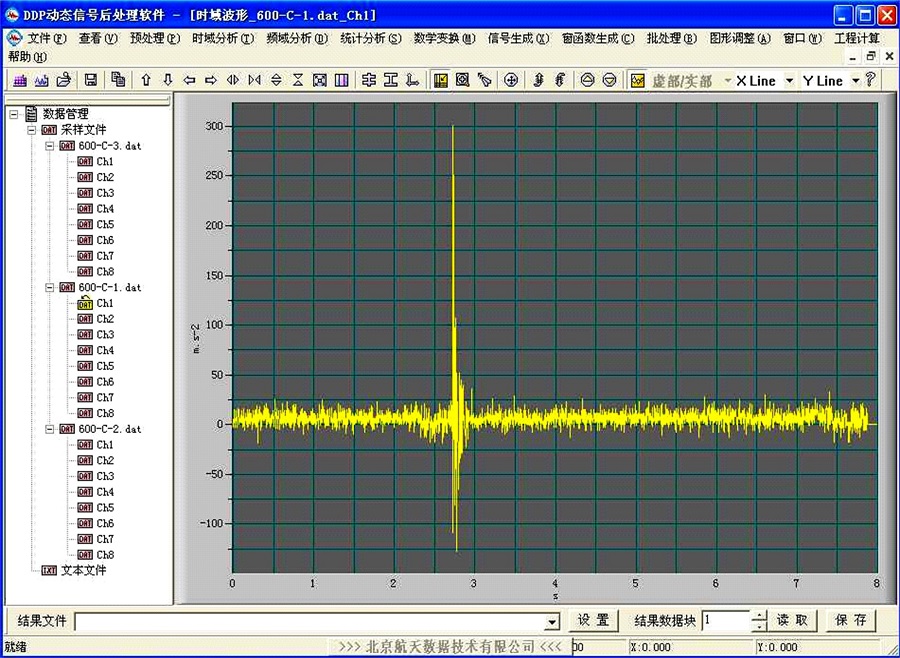 | 图3 加速度数据处理软件Fig.3 Data processing software for acceleration |
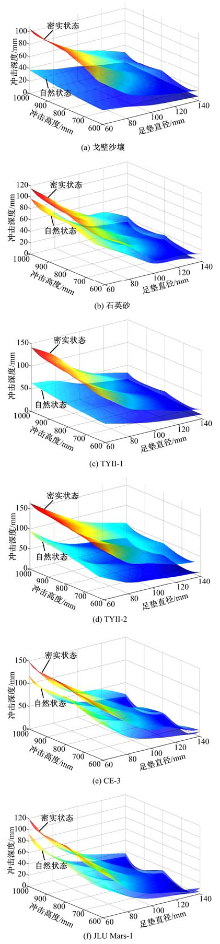
6种土壤试验条件下, 冲击深度随冲击高度和足垫直径变化如图4所示。由图4可知, TYⅡ -1、TYⅡ -2和CE-3型模拟月壤的冲击深度明显较大, JLU Mars-1型模拟火星壤和石英砂的其次, 戈壁砂壤的最小。相同试验条件下, 对比6种土壤冲击深度最大差值达61 mm(自然状态)和79.3 mm(密实状态), 最大值较最小值平均提高了1.49倍(自然状态)和1.09倍(密实状态)。
 | 图4 不同土壤条件下冲击深度Fig.4 Impact depth under different testing soil condition |
(1)土壤状态对冲击深度的影响
自然状态下, TYⅡ -1、TYⅡ -2和CE-3型模拟月壤的足垫冲击深度最大值明显较其他3种土壤的大, 石英砂和JLU Mars-1型模拟火星壤的其次, 戈壁砂壤的最小; 密实状态下, 最大冲击深度从大到小排序依次为:CE-3、TYⅡ -2、石英砂、JLU Mars-1、TYⅡ -1和戈壁砂壤, 其中戈壁砂壤冲击深度仍为最小。
土壤由自然状态变为密实状态时, 冲击深度的变化率如表3所示。对比发现, 戈壁砂壤、TYⅡ -1和TYⅡ -2的变化率较为明显, 均值达到50%以上, 而CE-3、JLU Mars-1和石英砂的平均变化率约为35%。由于戈壁砂壤为自然条件下形成, 颗粒粒径分布较广, 同样, TYⅡ -1和TYⅡ -2的粒径分布范围较CE-3和JLU Mars-1的大, 而石英砂的颗粒粒径相同属于匀质材料, 因此, 粒径分布较广的土壤, 其冲击深度对土壤状态的变化更为敏感。
| 表3 不同土壤密实度下冲击深度变化率 Table 3 Change rate of impact depth under different soil compactness % |
(2)足垫直径对冲击深度的影响
不同土壤条件下, 冲击深度随着足垫直径的增大逐渐减小。足垫直径的改变主要引起足垫与土壤的接触压强的变化, 试验中足垫直径平均变化率为23.75%, 对应的接触压强平均变化率为34.21%。不同足垫直径条件下, 冲击深度变化率最值和均值如表4所示。6种土壤条件下冲击深度的变化率均值分别为31.28%(自然状态)和33.5%(密实状态), 由此可知, 自然和密实土壤状态下足垫直径的影响不明显。对比表3发现, 足垫直径对冲击深度的影响较土壤状态的小。
| 表4 冲击深度随足垫直径的变化率 Table 4 Change rate of impact depth with footpad diameter % |
(3)冲击高度对冲击深度的影响
不同土壤条件下, 冲击深度随着冲击高度的增大而增大。冲击深度随着冲击高度条件变化率最值和均值如表5所示。6种土壤条件下冲击深度的变化率均值为25.40%(自然状态)和30.73%(密实状态), 自然状态下冲击高度的影响更明显。对比表4发现, 足垫直径对冲击深度的影响较冲击高度的大, 平均变化率分别为32.4%和28.1%。
| 表5 冲击深度随足垫直径的变化率 Table 5 Change rate of impact depth with footpad diameter % |
综上所述, 相同试验条件下, 6种土壤冲击深度差异明显, TYⅡ -1、TYⅡ -2和CE-3型模拟月壤的冲击深度明显较大; JLU Mars-1型模拟火星壤和石英砂其次; 戈壁砂壤的最小。土壤状态对冲击深度的影响最大, 其次为足垫直径, 冲击高度的影响最小。
冲击高度的改变使得冲击能量发生变化, 本文重点研究冲击高度对足垫冲击加速度的影响。在6种土壤条件下, 足垫直径为100 mm, 冲击高度分别为600、800和1000 mm时, 对足垫冲击的动态加速度数据进行采集。试验中, 足垫冲击能平均变化率为29.17%。
图5为不同土壤条件下加速度峰值随冲击高度的变化规律, 由图5可知, 试验条件下, 加速度峰值为16.7~42g(自然状态)和27.5~50.8g(密实状态), 其中g=9.8 m2/s。不同土壤条件下, 自然和密实状态下加速度峰值均值如表6所示, 土壤由自然状态变为密实状态时, 加速度峰值平均增加率为33.3%。
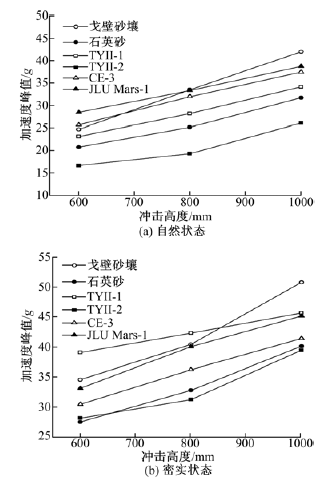 | 图5 加速度峰值随冲击高度变化规律Fig.5 Mean peak acceleration versus with impact height |
由表6可知, 自然状态下, TYⅡ -2的加速度峰值最小, 其次为石英砂和TYⅡ -1, JLU Mars-1、戈壁砂壤和CE-3相接近; 密实状态下, 石英砂和YⅡ -2的加速度峰值较小, 其次为CE-3, JLU Mars-1、戈壁砂壤和YⅡ -1的则较大。
| 表6 不同土壤条件下加速度峰值均值 Table 6 Mean peak acceleration under different soil state g |
试验条件下, 冲击力峰值随冲击高度的变化规律与加速度峰值变化趋势保持一致, 足垫垂直冲击力峰值为1.73~4.22 kN(自然状态)和2.80~5.08 kN(密实状态), 相较于土壤自然状态, 密实状态下冲击力峰值平均提高了32.1%。不同土壤条件下, 冲击力峰值平均值如表7所示。自然和密实状态下, TYⅡ -1和TYⅡ -2的冲击力峰值差异较明显, 而CE-3的则较小。不同土壤状态下, 戈壁砂壤的冲击力峰值始终最大, 主要原因是戈壁砂壤颗粒分布较广, 且存在较大粒径的石块, 在与足垫相冲击的过程中冲击力峰值较大; TYⅡ -2模拟月壤的冲击力峰值始终最小, 原因是由于其颗粒较细, 流动性明显, 能较好的“ 缓冲” 吸收足垫的冲击能。
| 表7 不同土壤条件下冲击力峰值均值 Table 7 Mean peak acceleration under different soil state kN |
基于美国在2013年公开了Apollo探月计划中着陆器着陆时的部分数据, George[12]给出了月球着陆器足垫受到的垂直力模型如下:
式中:
式中:
结合试验数据, 不同试验条件下的模型拟合系数值如表8所示, 相关系数R2均达到0.9以上, 表明修正的冲击力模型能较好地预测足垫冲击力峰值。由表8可知, 承载强度修正系数
| 表8 模型系数值 Table 8 Value of model coefficients |
(1)相同试验条件下, 6种土壤冲击深度差值最大达61 mm(自然状态)和79.3 mm(密实状态)。TYⅡ -1、TYⅡ -2和CE-3型模拟月壤的冲击深度明显较大, JLU Mars型模拟火星壤和石英砂其次, 戈壁砂壤的最小。
(2)试验条件下, 足垫直径对冲击深度的影响较冲击高度的大, 平均变化率分别为32.4%和28.1%。
(3)试验条件下, 土壤的密实度对足垫在冲击过程中的加速度峰值的影响较冲击高度的大, 土壤密实状态下的加速度峰值较自然状态下平均增加了33.3%。
(4)不同土壤状态下, 戈壁砂壤的冲击力峰值始终最大, 而TYⅡ -2模拟月壤的冲击力峰值最小, 土壤密实状态下的冲击力峰值较自然状态下平均增加了32.1%。建立了冲击力峰值修正模型, 该模型能较好地预测足垫冲击力峰值。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|