采用强跟踪中心差分滤波器的汽车状态和参数估计
 , 张家旭
, 张家旭 Estimation of vehicle state and parameter based on strong tracking CDKF
LI Jing1 , ZHANG Jia-xu1, 2 , ZHANG Yan-hua1 , CHEN Li-jun3
, ZHANG Jia-xu 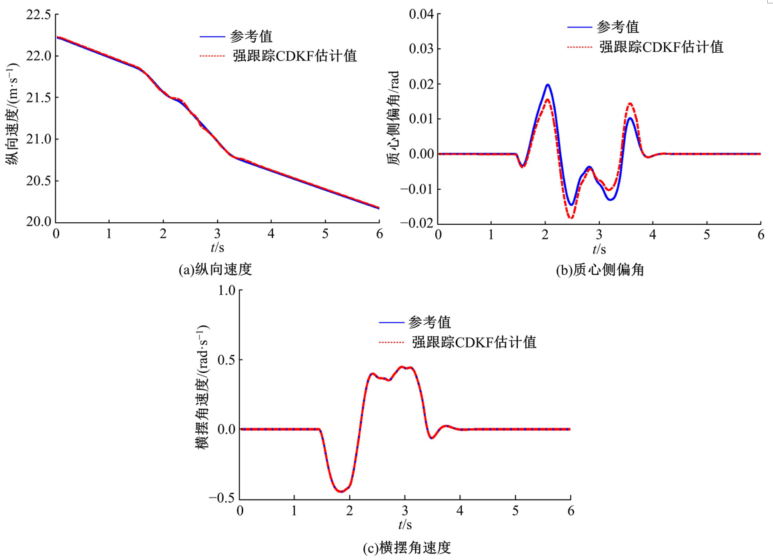
采用强跟踪中心差分滤波器的汽车状态和参数估计 |
|
李静, 张家旭 |
Estimation of vehicle state and parameter based on strong tracking CDKF |
|
LI Jing
, ZHANG Jia-xu |
| 正弦延迟试验纵向速度、质心侧偏角和横摆角速度估计 |
| |