

{kind=link}
{kind=link}
{kind=link}
基于应激响应的驾驶人视觉特性
[李显生1  , 孟凡淞
, 孟凡淞1 , 郑雪莲1 , 任园园1 , 严佳晖2 ]
, 孟凡淞, 任园园|
|


作者简介:李显生(1965-),男,教授,博士.研究方向:车辆行驶安全性与可靠性.E-mail:lixs@jlu.edu.cn
为了研究应激情况下驾驶人的视觉特性,分析了不同应激场景下驾驶人的眼动数据。采取动态聚类方法划分注视区域,选取了合适的视觉特性指标作为分析指标。运用主成分分析法及统计分析方法研究了被试驾驶人眼动数据,得到了基于应激响应的驾驶人视觉特性。试验结果表明:驾驶人在应激场景下视觉分配较为集中,遇到应激场景时,驾驶人更习惯于从前方近处区域作为获取交通信息的主要区域,当场景中出现移动的目标物时,驾驶人会根据目标物的移动范围选取1~2个相关的辅助区域进行信息获取的补充。同时,驾驶人对主要区域以注视为主,辅助区域以扫视为主。
In order to study the visual characteristics of the driver under stress condition, the eye movement data of drivers under different stress scenarios are analyzed. The dynamic clustering method is used to divide the gaze area, and the related visual characteristic indexes are selected to analyze. The principal component analysis and statistical analysis methods are used to analyze the eye movement data of the drivers. Test results show that when driver is under the stress scene the visual distribution is more concentrated, and the driver is more accustomed to obtain traffic information from the main area of the front region. When a moving object is in the scene, the driver will judge the moving range of the object and select 1 to 2 related auxiliary areas for information retrieval. The driver is used to gaze the main area and scan the auxiliary areas.
研究表明[1], 所有交通事故中应由驾驶人完全负责的占73.6%。同时, 人从外部世界获得的信息中, 由眼睛获取的约占80%[2]。眼睛是获得信息的重要认知途径, 因此, 研究应激情况下驾驶人的视觉特性, 即对交通冲突的认知研究尤为重要。许多专家学者对其进行了广泛而深入的研究[3, 4, 5], Yan等[6]对特长隧道中光区对驾驶人注视区域特性及交通安全的影响进行了分析, 研究发现, 特殊的光区在一定程度上有助于减轻司机的视觉疲劳, 同时某一特定的视觉刺激可以提高驾驶员的注意力。Moon等[7]分析了基于环形交叉口的驾驶员视觉变化特征, 发现驾驶人在距离环形交叉口80 m驾驶行为开始有所改变, 同时视觉信息与加速、减速信息有着显著性关系。Decker等[8]对广告牌对驾驶人视觉影响进行了研究, 试验发现, 10%~20%的驾驶人对广告牌的扫视时间不小于0.75 s, 广告牌内容的不同并没有影响驾驶人扫视时间的均值。郭应时等[9]通过研究发现, BP神经网络模型对驾驶人学习样本典型性有较强依赖; 而证据理论模型兼顾识别信度和实时性, 具有较强的实用性和一定稳定性。他们还研究了城市道路环境以及驾驶经验对注视行为的影响[10, 11]。分析发现, 国内外的研究多集中于应激场景下驾驶人操作、神经特性的研究及紧急情况下驾驶人反应时间的特性, 而很少涉及应激场景对驾驶人视觉特性的影响分析。本文拟通过在驾驶模拟器中设定不同的应激场景, 采集驾驶人相应的眼动数据, 通过分析确定不同应激场景中驾驶人的视觉认知特点及信息获取区域以及方式, 从而了解在高危险度场景中驾驶人的视觉认知方式和信息获取区域及方式, 以及一些其他视觉特性和眼动规律, 从而为车辆主动安全及驾驶人应激反应的研究提供理论依据, 同时为应激情境下车辆主动避险、辅助驾驶的研究提供参考。
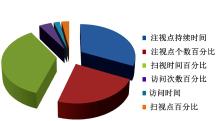
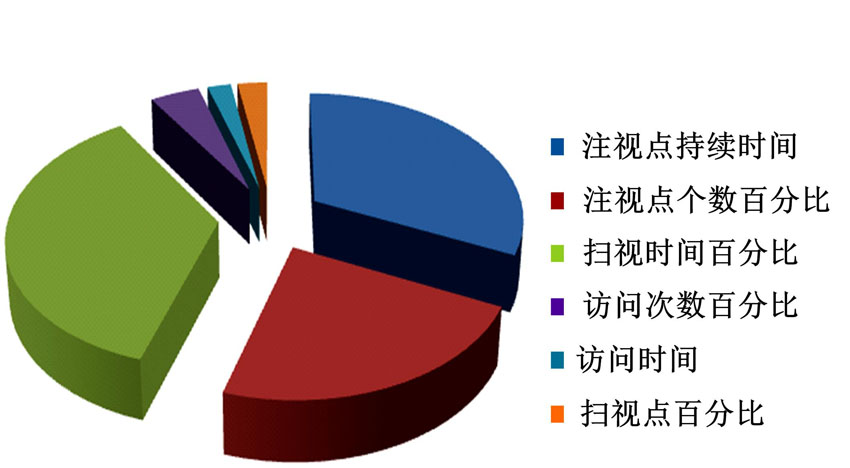
通过对国内外视觉特性研究等相关资料查阅整理分析[12, 13, 14], 发现视觉特性指标中与驾驶人关系密切且较为重要的描述指标为注视与扫视, 而注视点持续时间、注视点个数百分比、扫视时间百分比、访问次数百分比、访问时间、扫视点百分比
6项指标是被广泛认可的研究驾驶人视觉特性的重要表征参数。本文采用主成分分析法选取以上6种指标中能更科学、全面地反映驾驶人视觉特性的指标。
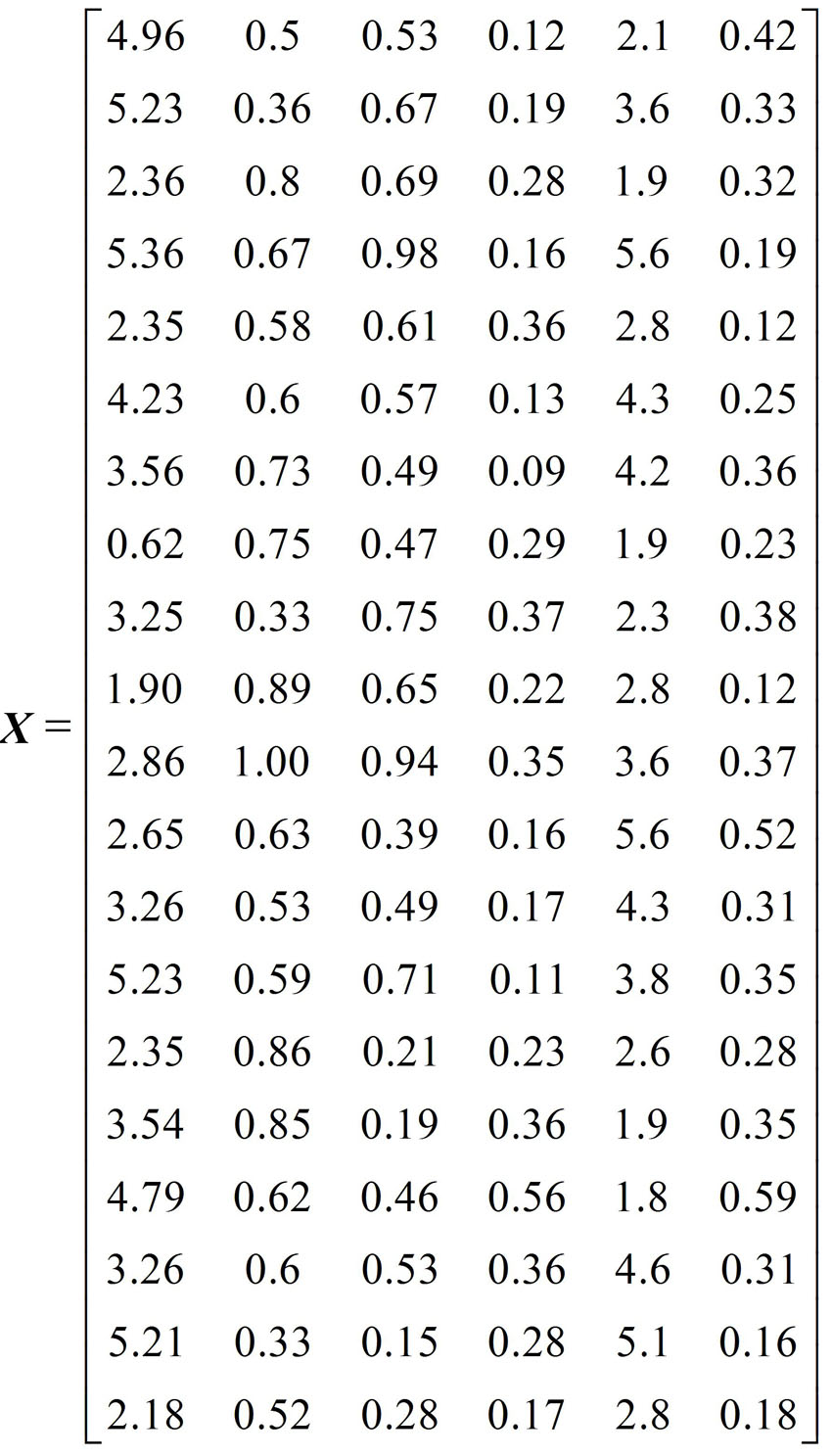
首先, 选取以上6个指标作为主成分分析的原始数据, 即所研究的问题有20个样本, 6个变量, 原始统计资料可整理为原始矩阵X。由于原始矩阵X中各个指标在数量级别上有着显著性差, 在应用主成分分析研究时可能会引入新的问题, 因此需要对原始矩阵进行标准化。
应用SPSS软件, 将原始矩阵中的数据进行标准化, 并将标准化后的矩阵进行主成分分析。分析得到各主成分特征根、贡献率和累计贡献率, 见表1。分析表1和图1可知, 前3个主成分的累计贡献率达到了90.919%, 即前3个主成分涵盖了所有信息的90.919%, 因而取前3个主成分。注视持续时间反映提取注视目标信息所用时间, 代表提取信息的难易程度; 注视点个数百分比可以得到驾驶人的注视目标和感兴趣区域, 有助于研究驾驶人的意图; 扫视时间百分比可以得到驾驶人对哪个区域更习惯用扫视的眼动形式进行信息的获取。
| 表1 各主成分分析结果 Table 1 Results of principal component analysis |
 | 图1 各主成分贡献率分布图Fig.1 Distribution map of each principal component contribution rate |
试验拟通过8自由度驾驶模拟器采集驾驶人的虚拟环境行驶过程中遇到的不同应激场景下的各项眼动数据及视觉指标变化数据, 同时分析驾驶人在应对设定的应激场景时其眼动数据的变化规律, 进而研究应激响应对驾驶人视觉特性的影响。
试验共选取驾驶人20名(包括职业和非职业), 试验40次, 每个驾驶人行驶两圈共遇到4个不同的应激场景。每个驾驶人试验的平均时间为25 min。采用Tobii ProX2-60眼动仪实时采集驾驶员眼动数据, 并对指标进行统计分析。在试验过程中, 两名跟车的试验人员负责观察接收驾驶人的眼动数据并及时对异常数据和突发情况进行合理化改善。
根据参与者的不同, 交通冲突通常分为机动车-机动车冲突、机动车-非机动车冲突、机动车-行人冲突、机动车-外界环境4种大的类型。为减少各类型交通冲突对驾驶人视觉特性影响的差异, 本文在试验中设置了以下4种应激场景:
(1)场景1(即机动车逼近场景):此场景属于机动车-机动车冲突, 即在车辆行驶过程中车辆从左侧逼近驾驶人驾驶的车辆。
(2)场景2(即前方有非机动车场景):此场景属于机动车-非机动车冲突, 即前方有非机动车从自车右侧移动至驾驶人正前方, 影响驾驶人正常行驶。
(3)场景3(即行人横穿场景):此场景属于机动车-行人冲突, 即当驾驶人快要通过人行横道时, 突然有行人从障碍物前方横向穿出。
(4)场景4(即天气变化场景):此场景属于机动车-外界环境冲突, 即当驾驶人行驶出隧道口后, 天气急剧变化, 突遇雨天。
驾驶人注视区域的划分是研究驾驶人注意力分配和注视转移模式的前提和基础。合理有效地划分驾驶人注视区域可以细化驾驶人注意力集中区域, 有助于提高驾驶人眼动规律分析精度。目前, 驾驶人注视区域的传统研究方法主要有3种:主观划分法、机械划分法和录像回放法, 其主要优、缺点如表2所示。
| 表2 注视区域传统研究方法 Table 2 Traditional research methods in area of fixation |
为克服传统研究驾驶人注视区域划分方法的缺点, 本文采用动态聚类方法对视野平面上驾驶人注视点坐标进行聚类分析。依据聚类结果划分注视区域, 其精确度比视野平面法高, 工作效率也比录像回放法高许多。将聚类分析结果与试验录像相对照, 确定各个注视区域相应的目标物。
聚类分析(Cluster analysis)是研究物以类聚的一种统计分析方法, 用于分析对事物类别不清楚, 甚至分成几类都不能确定的情况。聚类方法大致分为系统聚类法和动态聚类法[15]两类。系统聚类法具有运行效率过低的缺点, 当样品总数n较大时难以继续进行下去。动态聚类法是在局部分析的基础上, 可以再按某种最优的准则进行修正, 直至分类较为合理为止, 因此本文采取动态聚类法。
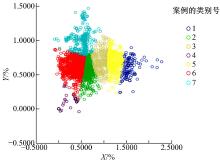
为使聚类结果更有代表性, 从20名驾驶人中选择5位眼睛大小以及性格差异性较大的驾驶员作为研究对象。聚类研究的眼动点为整个驾驶过程中的所有眼动点。以驾驶员注视点在视野平面上的解析坐标作为聚类变量, 即对注视点的位置进行聚类。采用SPSS软件的K-均值聚类功能完成动态聚类过程, 聚类过程中, 类的数量选取了6类、7类、8类、9类、10类5种, 比较后认为分成7类的聚类效果与实际比较接近。把每个驾驶员的注视点位置聚成7类后, 图形基本相近, 界线比较规律, 图2为其中一个驾驶员的注视点位置聚类结果。
'>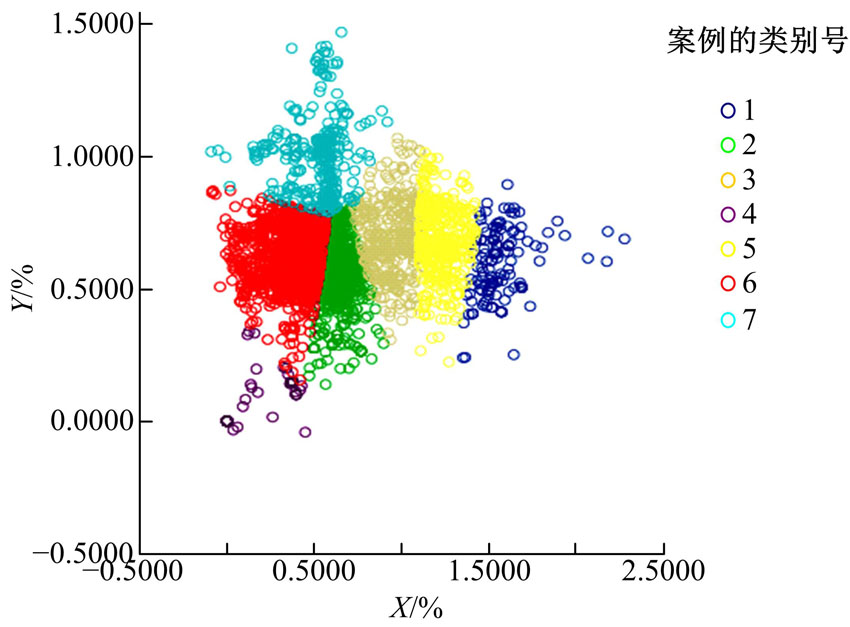 | 图2 驾驶人注视点位置聚类结果图Fig.2 Clustering results of driver's fixation point position |
4.1.1 驾驶人注视点持续时间
驾驶人行驶过程中, 主要有注视、扫视的眼动形式。注视可使驾驶人识别交通环境中的某个特征, 有一定的持续时间和注视位置。在整个试验过程当中, 整理分析20名被试在场景1中的注视点持续时间, 如表4所示, 表中数值越大则持续时间越久。以下3个场景采用同样方法进行分析。由于篇幅有限, 以下场景该指标将不再列表, 而直接进行特性分析。从表4可以看出, 驾驶人在试验所设置的场景中, 其大部分时间用于持续注视AOI 2和AOI 4区域, 即前方中间和右侧区域, 这两个区域的平均注视时间分别为4.30 s和1.19 s, 分别约占各区域总注视时间的68%和26%, 两区域的持续时间约共占总区域注视持续时间的94%。车辆向右逼近并最后停在右侧车道的情况下, 驾驶人主要关注前方近处区域和车辆最终停止的右侧区域, 其中驾驶人更关注前方近处区域。说明这种场景下驾驶人更倾向于将注意力集中于正前方区域来获取所需信息, 并在目标物经过自车正前方时注视停留时间增长, 同时驾驶人为安全起见会选择另一相关区域作为获取信息的辅助区域。
| 表4 场景1中不同注视区域注视持续时间 Table 4 Duration of fixation of different fixation regions in scene 1 s |
4.1.2 驾驶人注视点分布
采取用注视点个数百分比来表征驾驶人注视点分布情况。将每位驾驶人在场景1中的各个区域内注视点个数以及驾驶人整个前方视觉区域注视点的总个数分别进行统计, 整理分析得出所有驾驶人在不同注视区域注视点个数百分比的统计结果, 如表5所示。表中数值越大表示时间百分比越高。由于篇幅有限, 以下场景的该指标将不再列表, 而直接进行特性分析。
从表5可以发现, 注视点主要分布在AOI 1、AOI 2以及AOI 4三个区域, 即远处、近处中间以及右侧, 其中近处中间以及右侧这两个区域的注视点个数比例最高平均比例分别为60%和20%, 约共占整个区域的80%。说明在这种应激场景下, 驾驶人更加关注前方近处和车辆最终到达的区域。其中驾驶人对前方近处区域的关注不断增加, 分析可知驾驶人意图通过前方近处来判断目标物的可能行驶范围进而来决定自车采取的措施, 因而增加了对自车正前方近处目标物的视觉搜索程度。而右侧区域的注视点百分比仅次于前方近处, 由此可知, 驾驶人意图通过增加对目标车辆停止区域作为辅助判断的区域来获取视觉信息, 从而判断目标车辆是否有再次启动的可能, 因此驾驶人在经历过应激场景后会有预警的记忆和心理上对危险出现的准备, 同时驾驶人可从主要区域和辅助区域获取约80%的所需信息。
| 表5 场景1中不同注视区域注视点个数百分比 Table 5 Percentage of number of fixation points in different fixation areas in scene 1 |
4.1.3 驾驶人扫视时间百分比
扫视是驾驶人搜索目标的过程, 介于人眼的两次注视之间。在试验过程中, 整理分析20名被试在逼近场景下的扫视时间占访问时间的比例, 如表6所示。3个场景采用同样方法进行分析。表中数值越大表示百分比越高。由于篇幅有限, 以下场景该指标将不再列表, 而直接进行特性分析。
由表6分析可知, 扫视时间百分比这一指标中前方近处区域虽然依旧处于较高百分比, 但左、右两侧区域的扫视百分比有大幅提升, 由此可以说明驾驶人对前方近处区域重视程度较高的同时不断通过扫视的方式获取左、右两侧的交通信息情况。由表6可以发现, 对右侧区域的扫视时间比例较高, 稍高于左侧, 可见驾驶人对辅助区域采取扫视的方式确保信息的及时获取。即便目标车辆最终停在右侧, 驾驶人仍旧不断地通过扫视来获取信息, 确保目标车辆后续没有对自车行驶安全性影响的行为。
| 表6 场景1中不同注视区域扫视时间百分比 Table 6 Percentage of scanning time of different fixation regions in scene 1 |
4.2.1 驾驶人注视点持续时间
经上述方法分析可得, 驾驶人在自行车出现的场景中, 主要从前方近处区域提取驾驶所需信息。对此区域注视持续时间最长, 此区域驾驶人持续注视时间的均值为4.2 s, 远高于右侧区域的1.2 s和前方远处区域的0.7 s, 说明驾驶人在所设场景中, 对非机动车换道后的区域(即前方近处区域)更为关注。而由于非机动车换道前在右侧车道, 因此驾驶人对右侧车道的关注度仅次于正前方近处。分析可知, 驾驶人对冲突中移动目标物的始、末位置更为关注。
4.2.2 驾驶人注视点分布
驾驶人注视点主要集中前方远处、前方近处和右侧3个区域, 其中前方近处和右侧区域的注视点个数百分比较高。有70%的驾驶人对前方近处的注视点比例都超过了50%, 有85%的驾驶人对前方近处的区域关注度超过了45%, 因而驾驶人在此种场景下, 更倾向于通过前方近处来判断目标物的意图并决定自车行驶轨迹。同时, 驾驶人更易选取目标物出现的区域作为获取信息的辅助区域。研究发现, 随着目标物不断变换位置, 驾驶人的视野范围缩小, 但视线灵活性变好, 视线更活跃。
4.2.3 驾驶人注视点访问次数
通过分析发现, 80%的驾驶人在前方近处区域的扫视时间比例小于其他区域, 由此可知, 驾驶人对前方近处的重视程度要大于其他区域, 同时右侧区域和前方远处的扫视时间比例较大, 因此驾驶人习惯通过对右侧区域的扫视来辅助自己对目标物及交通环境的判断。而前方远处扫视比例较大则是驾驶人对目标物的追踪和与目标物距离的确认。
4.3.1 驾驶人注视点持续时间
行人横穿马路的情况下, 驾驶人主要从前方近处区域获取交通环境信息, 其次是从前方远处、左侧以及右侧来获取驾驶信息。其中, 驾驶人对前方近处的注视持续时间均值为1.8 s, 对前方远处、左侧以及右侧区域的注视持续时间均值分别为0.79、0.36、0.66 s。由此可知, 驾驶人从前方远处和右侧两个区域作为辅助区域来获取驾驶所需信息, 因此有行人横穿的场景对驾驶人的视觉负荷造成较大影响, 也使驾驶人注意力分散较大。
4.3.2 驾驶人注视点分布
分析场景3的数据可知, 在这种情况下, 注视点整体上分布得较为分散, 而相对集中于前方近处、前方远处, 左侧区域以及右侧区域。说明驾驶人在遇到行人横穿马路时, 需要关注更广的范围来获取交通信息, 进而确保安全驾驶, 而左侧和右侧的注视点比例分别为15%和17%, 由此可知驾驶人从左、右两侧获取信息的权重是相近的。而前方近处区域的注视点比例为43%。因此驾驶人依旧主要关注前方近处区域, 并意图从此区域判断行人接下来的行为, 进而决定自车的操纵。分析可知, 行人横穿场景中驾驶人的目光较灵活, 视线分布比较广泛, 范围比较宽阔。
4.3.3 驾驶人注视点访问次数
驾驶人主要通过扫视前方近处、左侧区域和右侧区域来获取行人的信息, 由扫视时间比例可知, 这3个区域比例均值分别为0.39、0.25、0.19 s。由此可见, 扫视的主要范围为行人从左到右的行走路线, 左侧区域略高于右侧区域, 说明驾驶人有预防从左侧出现行人的准备, 因此扫视时间多于右侧, 反映出驾驶人此种场景下较为谨慎的态度。
4.4.1 驾驶人注视点持续时间
雨天情况下, 驾驶人的主要注意力都集中在前方远处, 驾驶人对前方远处的注视远大于前方近处。这是由于雨天场景中, 驾驶人习惯不断观察前方远处来提前获取所需信息, 并以前方远处为主要区域、近处为辅助区域, 进而保证在恶劣天气环境下的安全驾驶。可见, 与其他场景相比, 天气恶劣场景下驾驶人的注意力变得更为集中。
4.4.2 驾驶人注视点分布
雨天情况下, 95%的驾驶人在前方远处区域的注视点比例高达56%以上, 其平均比例达到72%。在前方近处的注视点比例平均为20%。由此可知, 驾驶人在关注前方远处的同时用前方近处区域作为辅助区域来收集交通信息。
4.4.3 驾驶人注视点访问次数
雨天情况下, 驾驶人对前方远处道路的重视程度的较高, 而前方近处扫视时间所占比例较大, 由此可以发现, 驾驶人习惯在前方远处集中注意力, 以注视为主获取信息, 并不时地对前方近处区域进行扫视, 达到补充对交通环境的获知的目的。
(1)遇到应激场景时, 驾驶人更倾向于花费大量的注意力关注正前方区域。除雨天场景外, 其余应激场景中, 驾驶人更习惯通过前方近处来获取交通信息, 因而前方近处是驾驶人获取信息的主要区域。
(2)通过对比4个场景发现, 在存在移动目标物的应激场景中, 驾驶人除了会选择一个区域作为主要获取信息区域, 还会根据目标物移动的范围, 再选择一到两个辅助区域来补充信息的获取, 并关注目标物位置, 确保当前车辆与目标物之间的距离。
(3)驾驶人对用于获取信息的主要区域的注视点百分比均值往往高达60%~70%, 而辅助区域的注视点百分比均值约为10%~20%, 驾驶人通过主要区域和辅助区域了解全部信息的80%~90%。因而, 采用主要区域和辅助区域的视觉策略对安全驾驶较为有效。
(4)驾驶人对获取信息的主要区域采取的眼动形式以注视为主, 而对辅助区域采取的眼动形式则以扫视为主。
(5)在本文应激场景中, 驾驶人对右侧人行道及对向车道等区域的注视点个数百分比均值仅为9.8%, 驾驶人对这些区域的关注度较低。由此可知, 驾驶人在遇到应激场景时, 中枢神经兴奋, 注意力只集中于几个区域, 同时视觉分配更加集中。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|