{kind=link}
{kind=link}
{kind=link}
{kind=link}
自动巡航与可变限速协同控制对高速公路基本路段通行效率的改善
[李烨1, 2  , 王炜
, 王炜1, 2 , 邢璐1, 2 , 王昊1, 2 , 董长印1, 2 ]
, 王炜, 邢璐|
|


作者简介:李烨(1992-),男,博士研究生.研究方向:交通运输规划与管理.E-mail:yeli@seu.edu.cn
为了改善可变限速控制在应用过程中带来的通行效率损失,采用自动巡航与可变限速协同控制来对高速公路车辆进行管控。基于智能驾驶员模型建立了自动巡航控制模型,结合可变限速控制形成了协同控制方法,采用美国NGSIM微观交通流数据对模型进行了标定,并进行了高速公路仿真实验。仿真结果表明:协同控制能在有效降低瓶颈路段上游车辆速度的同时,降低平均每辆车增加的通行时间比例,从而有效改善高速公路的通行效率。
In order to improve the loss of traffic efficiency caused by the application of variable speed limit control, the integration of adaptive cruise control and variable speed limit control is analyzed to control the highway traffic. The cruise control model is developed from the intelligent driver model, and then it is integrated with the variable speed limit control method. The microscopic traffic data of the NGSIM in the USA are used to calibrate the models. Simulations of the highway traffic are carried out. Results show that the integrated control method reduces the average increasing rate of vehicles' travel time by successfully declining the speed of the vehicles in the upstream of the bottleneck, thus improving the traffic efficiency of the highway. The results of this study may provide valuable information for highway traffic management.
可变限速控制是一种较为传统的高速公路控制方法, 其核心思想是通过提前干预瓶颈路段上游的车辆减速来实现减少事故风险, 提高高速公路交通安全的目的[1, 2, 3]。可变限速控制技术的安全效益有目共睹, 但是由于车辆提前减速, 会增加车辆通过路段的行驶时间, 从而降低了该路段的通行效率, 成为该控制技术的一个缺陷。
近些年, 随着自动驾驶技术的不断发展, 自动巡航控制技术逐渐成熟[4, 5]。自动巡航技术通过控制车辆的跟驰行为来减小前后车间距, 以改善道路通行效率。因此, 利用自动巡航控制技术这一优势来弥补可变限速控制的不足具有巨大的研究价值。为此, 本文提出了自动巡航与可变限速协同控制模型, 通过两者的协同来实现高速公路基本路段通行效率的改善[6]。
自动巡航控制是自动驾驶技术的重要组成部分之一, 其通过车载检测器实时检测前车的速度、位置等信息, 通过控制中心对前车信息进行判断并做出快速反应, 从而实现车辆的自动加减速。已有学者通过跟驰模型对自动巡航控制进行模拟分析, 本文也基于智能驾驶员模型来构建自动巡航控制模型。
智能驾驶员模型是由Treiber等[7]于2000年提出的一种跟驰模型, 其模型采用前、后车速度差与期望间距来计算跟驰车辆加速度, 考虑了自由流至拥堵流多个状态的交通条件, 众多研究结果表明该模型的性能优良, 能够很好地反映微观跟驰行为。智能驾驶员模型的微观表达形式为:
式中:ta为感知反应时间; α 为最大加速度; v为车辆速度; v0为期望速度; s为前、后车间距; s0为车辆最小静止距离; T为安全车头时距; Δ v为前、后车速度差; β 为期望减速度。
智能驾驶员模型的优势在于拥有6个具有明确物理意义的参数, 即ta、α 、v0、s0、T、β , 通过改变部分参数可以有效地实现对自动巡航控制的模拟[5]。由于自动巡航控制的核心在于缩短跟驰车辆的反应时间和前、后车间距, 以达到提高道路通行效率的目的。因此, 对智能驾驶员模型中的ta和T这两个参数进行相应调整来构建自动巡航控制模型[6]:
式中:k1和k2分别为ta和T的调整参数。
可变限速控制是一种应用较为广泛的安全控制技术, 通过提前干预瓶颈或事故路段上游车辆的速度, 使其分段逐步提前减速, 来实现降低事故风险, 改善交通安全的目的。已有研究提出了众多可变限速控制模型, 本文采用Li等[1]提出的基于追尾事故分析的可变限速控制模型, 该模型表达如下:
式中:VSL(xi, t+Δ t)为t+Δ t时刻在位置xi处的计算限速值; Δ t为检测器检测的时间间隔; V(xi-1, t)为t时刻在位置xi-1处检测器检测的速度值;
式(5)表示通过当前周期t下游位置xi-1处检测到的占有率与速度信息来计算下一周期t+Δ t上游位置xi处的限速值VSL(xi, t+Δ t)。该计算限速值导致的速度变化不能超过最大速度变化率Δ VSL, 否则会导致车辆速度骤降造成事故。因此, 实际限速值V'SL(xi, t+Δ t)需要对计算限速值进行修正得到。
协同控制的关键在于建立自动巡航控制与可变限速控制之间的联系, 本文通过自动巡航控模型中的期望速度v0与可变限速控制中的限速值V'SL来实现这一协同。在t时刻, 下游检测器检测到占有率过大, 车辆产生排队, 可能为瓶颈产生, 需要控制上游车辆逐段减速, 计算得到t+Δ t时刻的实际限速值V'SL, 通过路侧信号发布牌向车辆发送限速信息, 令V'SL=v0, 当车辆运行速度大于期望速度时, 式(3)中的加速度为负值, 车辆逐步减速, 直到速度低于期望速度, 从而实现车辆的限速控制。通过协同控制, 既能保障可变限速的安全效益, 又能充分利用自动巡航控制的优势, 提高道路通行效率。
本文标定的参数分为两类, 一类通过微观交通流数据进行标定, 另一类由于自动控制车辆的微观数据较为缺乏, 因此根据前人的研究采用合理的仿真值, 并进行相应的仿真分析。
本文采用美国的NGSIM数据库中的微观交通流数据进行参数标定[8], NGSIM为公开的数据库, 包含了4条道路的高空视频采集数据, 可以获得精确度达到0.1 s级别的车辆横纵向位置、速度、加速度等信息。选取的道路为美国I-80高速公路的Emeryville路段, 全长1650英尺(503 m), 包含1个进口匝道和6条车道, 其中最内侧为HOV车道。选取的路段数据采集时间为2005年4月13日16:00~16:15, 该时段道路交通拥挤, 车辆行驶速度较低, 从中筛选提取跟驰车辆100组, 共24 810个轨迹数据进行标定。
待标定参数共有6个, 分别为ta、α 、v0、s0、T、β , 采用近些年最为成熟的轨迹标定法进行标定[8, 9]。轨迹标定法通过对比实测轨迹和仿真轨迹误差最小, 从而获得最佳参数, 其本质类似于最小二乘法。通过建立轨迹标定优化目标函数, 利用最优化算法来实现这一过程。本文中每辆车的目标函数为:
式中:n为车辆编号; Δ t为观测时间;
通过计算N辆车的平均误差值, 构建标定的总体误差目标函数为:
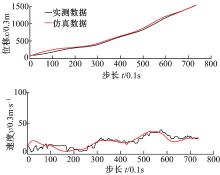
通过对100组跟驰车辆的24 810个轨迹数据进行标定, 得到参数结果如表1所示, 车辆轨迹如图1所示。
| 表1 自动巡航控制模型部分参数标定结果 Table 1 Calibration values of some parameters in adaptive cruise control model |
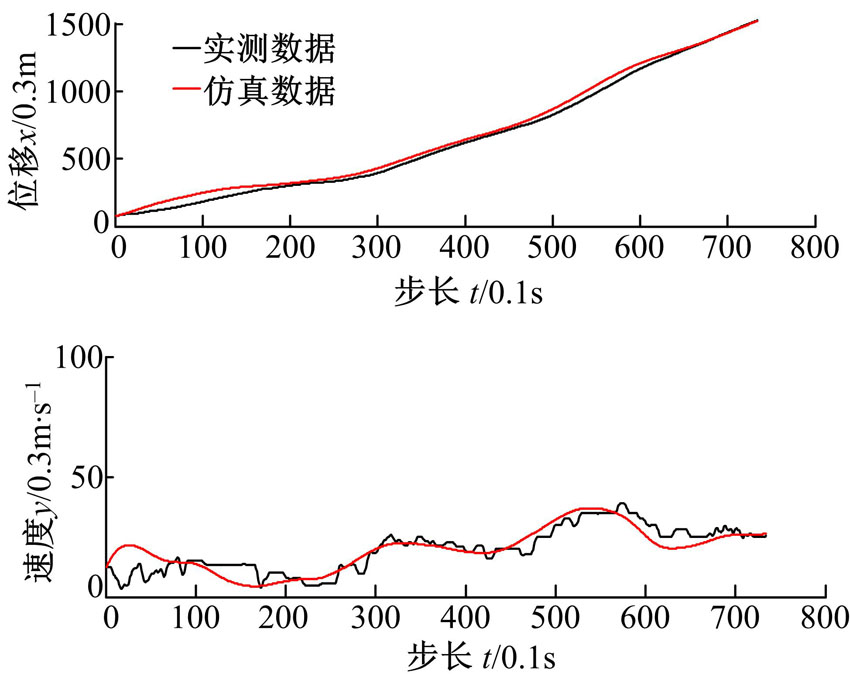 | 图1 车辆轨迹标定图Fig.1 Calibrated trajectories of vehicles |
对于无法进行标定的第二类参数k1、k2、Δ t以及Δ VSL, 根据已有研究采用合理值进行仿真。其中, Kesting等[5]对利用智能驾驶员模型进行自动巡航控制的模拟进行了大量研究, 提出了相关的合理取值, 本文基于此取k1为0.5, k2为0.7。Δ t和Δ VSL为可变限速控制模型中的常用参数, 本文取Δ t为30 s, Δ VSL为15 (km· h-1)/(30 s), 并在后文进行了相应的敏感性分析。
基于MATLAB构建了仿真平台, 对无控制、可变限速控制、协同控制3种策略进行仿真, 对比分析协同控制对高速公路通行效率的改善效果。仿真道路为一段长为8 km的高速公路基本路段, 单向三车道, 只考虑车辆之间的跟驰作用, 不包含换道行为。在基本路段7.5 km处模拟高速公路瓶颈, 因此会对上游车辆造成安全影响。可变限速信息发布牌设置在0.5~7.5 km内, 每隔1 km设置一处。
仿真时长为60 min, 共计1200辆车。为模拟I-80高速公路拥堵时段交通状态, 车辆初始速度不应大于标定所得的期望速度v0, 因此设置为65 km/h, 初始间距按智能驾驶员模型的平衡间距分布, 车辆到达瓶颈区速度骤降为15 km/h。无控制策略和可变限速控制下, 所有车辆按照智能驾驶员模型运行, 协同控制下, 车辆按照自动巡航控制模型运行。每类仿真进行3次取平均值以保证统计上的有效性。选取速度和行驶时间作为分析指标。
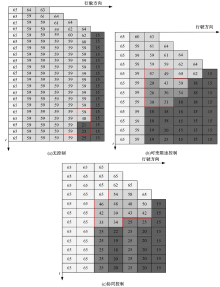
 | 图2 速度变化图Fig.2 Variation of speeds |
图2所示为仿真高速公路基本路段各检测器检测的速度值, 检测时间间隔为30 s, 自左往右为车辆运行方向, 自上向下为时间累积方向。由图2(a)可以清楚地看到, 无控制策略下, 同一检测位置车辆速度骤降, 相邻路段上、下游车辆速度差异巨大, 极易引起追尾事故。鉴于此, 可变限速控制(图2(b))通过提前干预的方法, 迫使上游车辆提前减速, 因此可以有效降低瓶颈路段上游车辆的速度, 使得相邻路段速度差不过于大, 从而降低事故风险。然而, 由于提前降速导致上游车辆速度普遍过低, 也因此导致通行效率的下降。图2(c)所示即为协同控制的效果, 通过自动巡航控制车辆较小的车辆间隔, 既有效降低了瓶颈路段上游车辆的速度, 保障了安全, 又使得车辆速度不至于降得太低, 保障了通行效率。此外, 由于篇幅原因, 图2只展示了典型时段的速度信息。
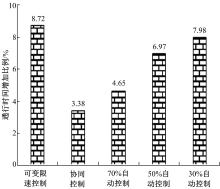
图3为仿真路段各种策略下所有车辆通行时间的对比。以无控制策略的平均通行时间为参考值, 可变限速控制导致车辆平均通行时间增加了8.72%。由此可见, 可变限速控制虽然可以有效地降低高速公路车辆间的事故风险, 但是会造成一定的通行效率下降损失。在目前实际应用中, 由于基于安全第一的通行理念, 驾驶员仍能接受通行效率的损失。但当未来自动驾驶技术的不断更新发展, 自动巡航控制技术的不断成熟, 该损失可以被有效降低。图3表明, 当所有车辆为自动巡航控制时, 采用自动巡航与可变限速协同控制可以有效减少通行效率损失, 车辆平均通行时间相对于无控制策略仅增加了3.38%, 低于仅有可变限速控制的8.72%。图3还反映了高速公路上自动巡航控制车辆比例逐步变化对协同控制效果的影响。从该图可以看出, 随着自动巡航控制车辆比例的不断增加, 增加的通行时间比例也在不断降低。
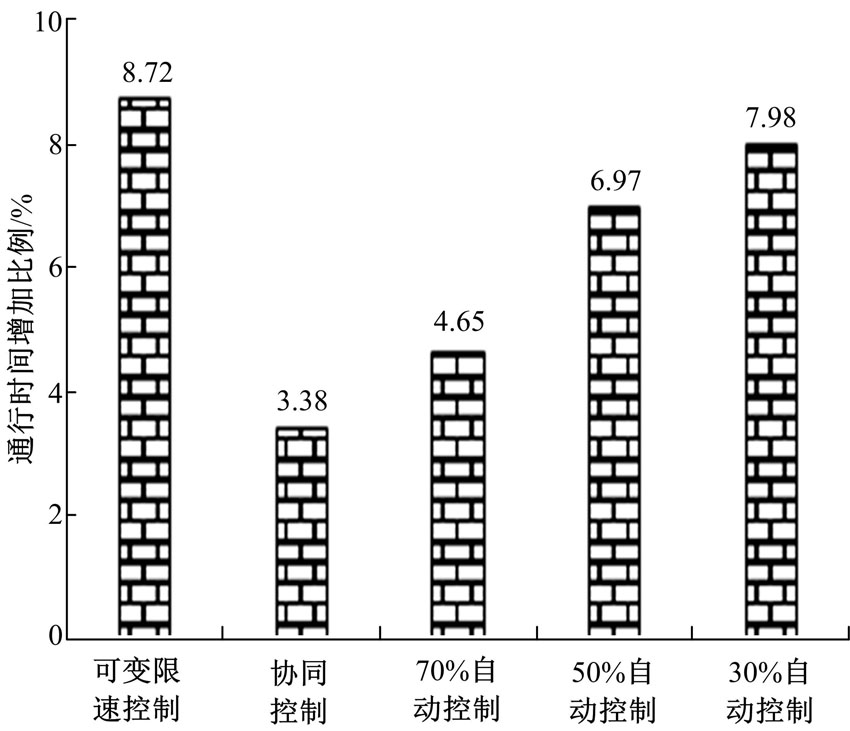 | 图3 通行时间增加比例Fig.3 Increasing proportions of travel time |
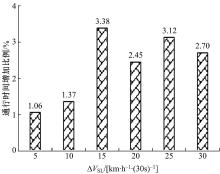
由于本文引入了自动巡航控制技术, 需考虑一般的可变限速控制模型参数Δ t和Δ VSL的取值是否合理。考虑到Δ VSL是每Δ t时间段内速度的变化值, 因此Δ VSL包含了Δ t值的影响, 只需对Δ VSL进行相应的敏感性分析, 结果如图4所示。总体而言, 不同Δ VSL值下, 协同控制带来的通行时间增加比例为1%~3.5%, 都小于可变限速的增加比例8.72%。不同Δ VSL值对协同控制下的通行时间改善并无单调效果, 其中, Δ VSL取5、10 (km· h-1)/(30 s)时带来的增加比例较小, 分别为1.06%和1.37%, Δ VSL取15~30 (km· h-1)/(30 s)时, 由于车辆速度下降较大, 对应的增加比例因此也较高。
 | 图4 Δ VSL敏感性分析Fig.4 Sensitive analysis of Δ VSL |
提出了一种自动巡航与可变限速协同控制的方法来改善高速公路通行效率。基于智能驾驶员模型构建了自动巡航控制模型, 结合可变限速控制形成了协同控制方法。应用美国NGSIM微观交通流数据对模型参数进行标定, 采用MATLAB进行仿真实验, 仿真结果表明, 协同控制能在有效降低瓶颈路段上游车辆速度的同时, 降低平均每辆车增加的通行时间比例。本文的研究结果对未来高速公路管理具有参考价值。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|